1. Introduction
The conventional transportation system is producing nearly 14% of total worldwide greenhouse discharges, which is estimated to increase further 50% by 2030 [
1]. Air pollution alone is one of the major extraneous costs of transportation, especially as it directly influences the health of local inhabitants. The growing international desire for adopting environment-friendly technologies has resulted in the acceptance and usage of alternate fuel vehicles that can be hybrid and battery-operated electric vehicles (EVs). However, EVs have been unable to secure the confidence of customers and acquire a large market share yet. This is mainly due to their technical and infrastructure limitations, such as limited driving range and unavailability of charging facilities. Moreover, the resultant cost considerations also deter potential customers. In order to further the public acceptance of EVs, it is important to improve the EV infrastructure for all key stakeholders.
A significant aspect of these infrastructure requirements is the abundant availability of charging points and charging stations. Charging places act as connection sources to the electrical grid for the EV, and the place of powering up the batteries for EV drivers. However, a major challenge for existing power systems will be to maintain demand response (DR) with the growing demand for electricity as a result of an increased number of EV parking lots. Currently, how to manage the adaptability of EV use and their charging without having a drastic impact on existing power grids is a contentious topic [
2,
3]. The recent advancements in control strategies and sensing visualize DR as an effective tool to help address the issue of demand-supply mismatch in electric power grids. The DR program provides customers with leverage to shift their electricity demand from peak hours to off-peak hours and as a consequence, derive benefits in terms of lower electricity prices and financial incentives. In Refs. [
4,
5,
6], a number of DR programs were explored to lower the overall power usage of a household for load shifting and curtailing the appliances of residential households during peak hours.
Modern utility grids need suitable candidates that can be involved in the DR programs for demand curtailment of the grid in peak hours. The large-scale EV parking lots are one of the most suitable solution due to following reasons: (a) by managing the accumulated electrical load of the parking lot can act as a large-scale demand curtailment player in the power market and (b) the electrical load flexibility of EV charging loads with adjustable and interruptible features can ensure that EV charge scheduling can coordinate with the grid’s DR programs to satisfy all charging demand of EVs, while fulfilling committed demand curbing for DR. In DR programs, the electricity tariffs are usually dynamic in nature and may include day-ahead market pricing [
7,
8], real-time pricing [
9,
10] or time-of-use structure of pricing [
11]. Due to the adjustable features present in the EV charging load, it is possible for EV smart parking lots to explore possibilities to execute both incentive-based and price-based DR programs.
Therefore, in this paper, a real-time charge management system (CMS) is developed to charge EVs parked in a smart parking lot by taking into consideration the advantages of DR programs. The EV charging mechanism is optimized using the linear programming (LP) and convex relaxation techniques. The objective of the CMS is to maximize the number of EVs that can be fully charged over a 24-h period and minimize the cost of energy consumption by participating in different DR programs. Moreover, the DR event will also curtail the total charging load of the smart parking lot. In the proposed CMS, the on-off (binary) charging strategy is employed to solve the EV charging problem while considering the state-of-health (SoH) of the EV battery and its C-rate. The C-rate is a measure of the rate at which a battery is charge/discharged relative to its maximum capacity. Under the binary charging technique, the EV attached to the charging pole will be charged at fixed maximum charging rate as per C-rate equals to 1 C. Thus, in addition to consuming less time, it will also have minimal impact on the battery health by fully utilizing the battery’s single charging cycle. However, the optimization of binary charging decision for every EV is a non-trivial task because the scheduling of EVs is formulated as a binary optimization task. The intelligent charging schedule can be determined using the generate and test method, also known as exhaustive search. However, it is not recommended for real-time implementation due to its computational expensive nature. Therefore, the problem is mitigated by developing a convex relaxation approach that is integrated with the LP, where near intelligent charging scheduling is computed. Finding the intelligent charging schedule for EV is a non-convex problem due to the high number of EV, and random arrival and departure times. Therefore, the binary constraint in the problem related to the on-off charging strategy is relaxed to solve the problem as a convex problem using LP. Thereafter, a modified mapping is used to convert the solution back to binary values. This whole process is named as the simplified convex relaxation approach integrated with the LP. More details about this process have been provided in
Section 5. The main contributions of the paper are as follows:
Modelling of a realistic EV smart parking lot by considering: (a) regular and random arrival and departure times for EV; (b) different types of EV along with different battery capacities and charging rates; (c) level-2 battery charging standard; and (d) EV battery efficiency and life cycle.
First, an on-off (0/1) charging technique is used for the EV, i.e., an EV selected for charging in a time interval will be charged at fixed maximum charging rate according to its level II charge rate. Charging an EV at constant power may extend the battery’s service time. Secondly, the communication overheads will be small as only a small subset of the EV will be required to contact and it would be more feasible to apply on/off charging scheme. However, the target is to charge maximum EV with the minimum charging price possible. Whereas, the scheduling of the EV for intelligent charging using the on-off/cyclic technique is a binary optimization issue that is computationally extensive to be resolved at run-time if the number of EV will increase. In order to address this issue, an EV charge scheduling technique named simplified convex relaxation approach integrated with the LP is utilized.
The DR program can lower the cost of electricity for EV parking lots; therefore, DR events are introduced in the on-off charging technique. The on-off charging scheme not only respond to the variable electricity prices but also responds well for demand curtailment events from the grid.
Second, a variable charging rate technique for the EV charging is tested while having fixed capacity limit of the EV charging station, i.e., all the charging poles in the EV parking lot are used to accommodate all arrived EVs. However, the drawbacks of variable charging rates are: (a) charging EVs at constant power could extend the service time of the battery, which is a disadvantage in variable charging rate [
12] (b) variable charge rate will extend the charging time of the battery.
A thorough comparison of both binary charging scheme and variable charging scheme is conducted based on maximum revenue generation, energy consumption cost, number of EVs charging in a daytime, and the impact on the battery life of the EVs.
The paper is organized as follows: A detailed literature review is presented in
Section 2, the system model and optimization technique are discussed in
Section 3,
Section 4 comprises of results, discussions, and comparative analysis. Finally, the paper is concluded in
Section 5 along with some proposals for future research directions.
2. Literature Review
In the past, researchers have developed EV smart parking lot models and applied numerous optimization techniques in order to schedule EV charging. The objectives of all such EV scheduling techniques in EV smart parking lots are at least one of the following: (a) maximize the number of EVs charged in an allocated time [
13]; (b) maximize the smart parking lot profit [
14]; (c) minimize the EV owner’s charging cost [
15]; and (d) minimize the peak demand by participating in DR [
16].
In Refs. [
13], the authors address the problem of EV charging schedules from the perspective of smart parking lot operator and EV owners. Through the utilization of quadratic problems, the optimization objectives were to maximize the number of EVs charged and the overall revenue of the smart parking lot while minimizing the EV charging costs for the EV owners. Similarly, in Ref. [
17], game theory is used to schedule the EV charging to maximize the utilization of the smart parking lot by increasing the number of EVs to be charged. Accordingly, a greater number of EV owners can be accommodated. However, the authors have not considered the stochastic features of electricity price variations and the driving patterns of the EV. In Refs. [
18,
19], MILP and fuzzy linear programming (FLM) are used, respectively, to maximize the smart parking lot profit by effectively optimizing the charging schedule of the EVs. Similarly, in Ref. [
20], a linear programming (LP) technique and dynamic programming (DP) model are used, respectively, to maximize the smart parking lot profit and to minimize the charging costs of EV owners. The problem with LP is how to simultaneously handle both real number and integers; therefore, MILP is more suitable then LP. The DP lacks a general formulation and every problem need to be addressed in its own way. Moreover, the DP consumes more memory while storing the results of intermediate steps, which is not the case in MILP.
The DR program is an effective tool to minimize the cost of energy consumption while participating at a different level of programs. Therefore, in Ref. [
14], the authors introduced the participation of EV smart parking lots in incentive-based and price-based DR programs along with the stochastic programming optimization technique, with a view to maximizing the EV smart parking lot profit. A similar technique with same the objective is used in Ref. [
21] wherein the authors introduce smart parking lot as an aggregator agent in the real-time DR market. The energy source is parked EVs in the smart parking lot. Therefore, in Ref. [
22], the EV smart parking lot is introduced as a multi-energy system (MES) to enhance the profit of the smart parking lot and to improve the operational capability of the MES.
Meanwhile, a graded control algorithm for EV charging across several aggregators is proposed in [
11] to minimize the peak load of the smart parking lot and electricity cost. The heuristics are developed in such a manner that at first, the distribution system operator (DSO) will solve the charging curve by participating in the DR program, after which the charging power will be allocated to each EV. An algorithm based on quadratic programming (QP) is proposed in Ref. [
15] to optimize the charging schedule of EVs in order to minimize the charging cost of EV owners. Similarly, the DP is used in Ref. [
23] for EV charging schedules with an aim to maximize the smart parking lot profit and minimize the EV owner’s charging cost. In Ref. [
23], the DP is solved by assuming the parked EVs in the smart parking lot as an aggregated battery bank. A simulation platform named Okeanos is proposed in Ref. [
24] based on a multi-agent DR program with an aim to get benefits from the optimal EV charging. According to the authors, increasing the number of charged EVs and minimizing the electricity tariff through the DR program can help optimize the EV charging schedule [
24]. In Ref. [
25] the authors developed an algorithm to minimize the EV owner’s charging cost by combining a distributed DR method and parked EVs as a storage capability. Similarly, using the LP algorithm, a distributed DR method using the random usage pattern of EVs is proposed in Ref. [
26]. The objective of the model is to minimize the peak demand of the utility grid to minimize electricity cost. In Ref. [
27], a real-time EV charging scheme for EV smart parking lot is proposed using MILP that coordinates and priorities requirements of EV charging and discharging powers with the power generation of the utility grid, renewable energy sources (RES), energy storage system (ESS), and electricity price preferences.
In Ref. [
28], a distributed EV charge management scheme is proposed from the perspective of EV owners to minimize the wait time of EV charging on parking lots. The authors proposed a P/S communication framework to utilize charging reservation effectively. In Ref. [
29], another similar work, the authors proposed a preempted charging recommendation system for the income EV using V2V based reservation system with an aim to minimize on-the-move charge time and travelling time. In our work, we incorporate the arrival and departure time of the EV to ensure no delay in service for EV charging, while the advance reservation system for EVs does not lie in the scope of our work.
To the best of our knowledge and analyzing the previous studies described in this Section, the proposed work is comprehensive in that the proposed scheme aims to use EV smart parking lots as a service provider and a decision-maker in DR program to optimize the intelligent charging schedule of parked EV. We developed an objective function that maximizes the number of EVs charged at a given time. However, the selection process of EV charging involves EV charging priority, state-of-charge (SoC), and electricity pricing preference; therefore, the advantages of the objective function are manifold, such as maximization of the smart parking lot profit, minimization of the EV charging cost for the EV owners, minimization of the peak demand by participating in different DR programs, and minimized impact on the state-of-health (SOH) of the EVs’ battery by charging the battery at the maximum and fixed maximum charge rate as per level-II charging of EV at C-rate equals 1 C.
3. System Model
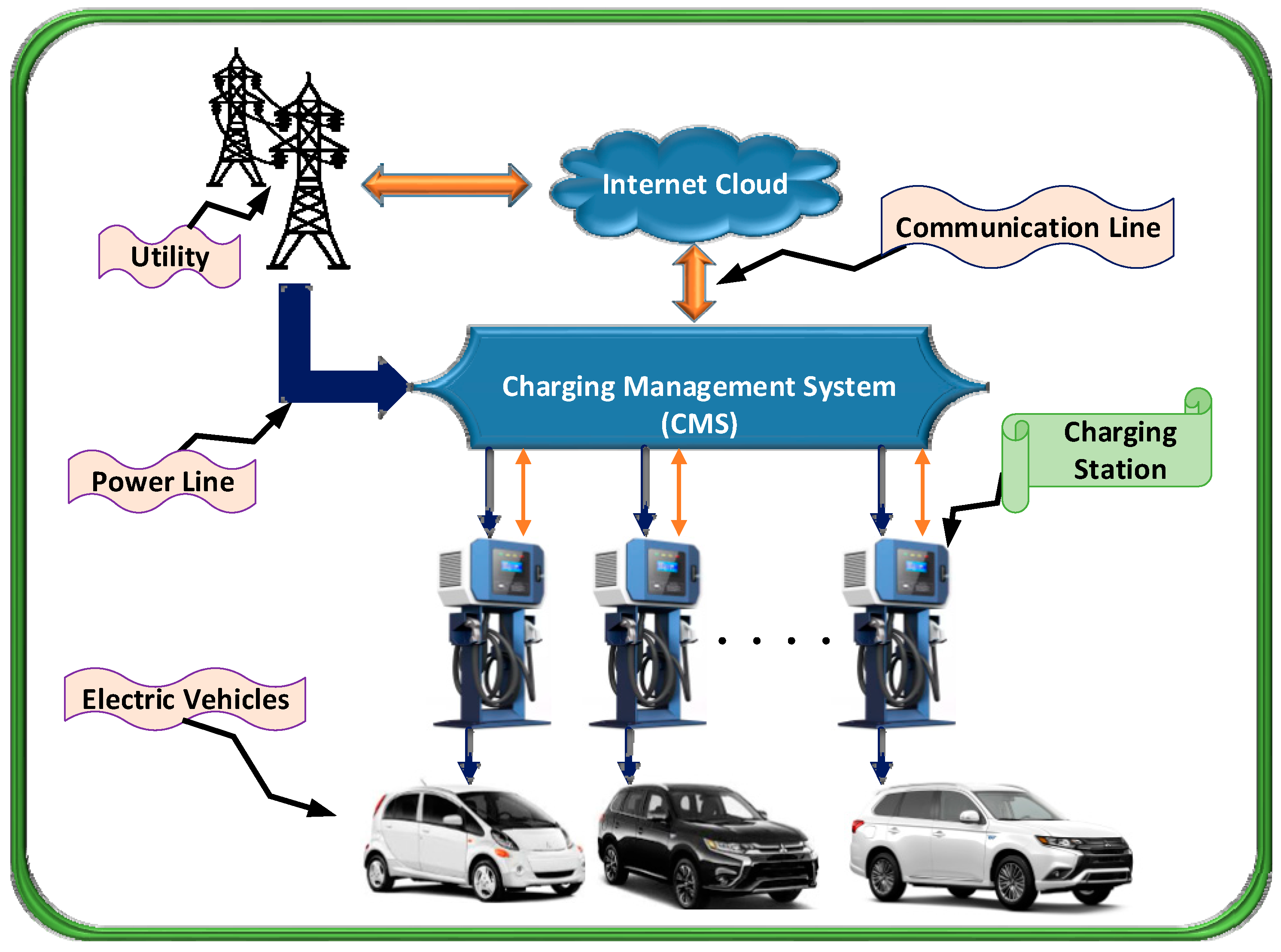
The system model for charging EVs in the EV smart parking lot is depicted in
Figure 1. The model includes the following: (a) main grid (utility grid); (b) the aggregated electric load of parked EV; (c) charge management model (CMS); and (d) real-time DR power market. The primary source of energy for the EV smart parking lot is the main grid. The LP and simplified convex relaxation techniques are used to optimize the EV’ charge scheduling.
3.1. Preliminary Discussion
In the future, as the demand for EV charging increases, smart parking lot operators will be encouraged to install more charging points to incorporate more EVs. However, charging power capacity is a hard constraint that will limit the number of EVs to be charged at a given point in time. Moreover, variables, such as arrival time, departure time, EV battery capacity, driving cycle, and maximum charge rate of any EV depend on the vehicle type and manufacturer. Therefore, an optimized EV charging strategy is needed to control and manage the charging capacity of the smart parking lot in order to provide charging services to a large number of customers by taking into consideration the departure time of the EVs. Moreover, for the purpose of avoiding maximum capacity overload, a charging priority needs to be determined for the parked EVs to ensure fair charging preferences and to provide enough charging for an EV before departure time. Charging all the parked EVs simultaneously can overburden the utility grid due to the maximum power consumption capacity cap imposed on the smart parking lot. However, by using an intelligent EV charge scheduling algorithm, the peak load demand can be managed, delayed, or optimized by taking into consideration the departure time of the EV. This technique can make EV smart parking lots good candidates as aggregated agents in the DR program. Therefore, the EV smart parking lot will be suitable for the day-ahead electricity pricing tariff by managing their electric load throughout 24-h. Considering all the aforementioned attributes, the proposed CMS is designed in a manner that can optimize the EV charging schedule by managing the request of the DR program using a day-ahead electricity pricing tariff.
As illustrated in
Figure 1, the CMS establishes two-way uninterruptable communication between the utility grid and the smart parking lot by sharing the electricity load curve with the grid and optimizing the scheduling of the parked EVs in accordance with the DR requirement of the grid. Moreover, the CMS computes the total electricity consumption cost. Therefore, the objective of the CMS is to manage the DR curve for the smart parking lot. The CMS stores the arrival time of each EV parked at the charging station to optimize the charging schedule of each parked EV. Moreover, the driver needs to enter the departure time and charge ranking on the smart parking station pole. Furthermore, the CMS computes the charge rate for each parked EV as the maximum charging rate varies for different make and model of the EV. Therefore, the idea behind the optimized CMS is to charge the parked EVs at fixed charge rates or halt the charging considering the departure time of the EVs. In this process, there must be an increase in the count of the number of fully charged EV during the whole day.
The motivation to participate in the DR program initiated by the utility grid is the demand flexibility of the charging loads (EVs) in the smart parking lot. The DR programs can be either fixed or time varying. The demand reduction curve programmed by the smart parking lot relies on the DR proceedings that include the fruitful bids processed in the day-ahead environment for the bidding of the required demand profile.
3.2. EV Charge Scheduling Technique
Let
denote the number of charging poles to offer charging facility for the EVs that have arrived in the EV smart parking lot. The CMS will develop a real-time (0/1) cyclic optimized charging schedule technique for the EVs attached to the
charging poles. The arrival and departure of the EVs in the smart parking lot is a continuous process; however, a sampling interval
is taken for the decision-related propose of the real-time algorithm. The CMS will optimize the EV charging schedule after every
time interval. Therefore, the 24 h in a day are divided into
time intervals such that
. If an EV is attached to the
th charging pole at a real-valued time interval
, an enrolling status will appear, and the charging pole is considered as being triggered. A binary variable
will determine the connection state for each
th charging pole at the
th time interval, where
represents the number of charging pole
and
is the number of time interval
. The variable
= 1 if the
th charging pole is connected to an EV; otherwise
. Given that the daytime is divided into
time intervals, the arrival time interval of the EV attached to the
th pole is computed as:
/
. A rounding with ceiling operator
is applied to select the lowest integer value as
. The driver is bound to insert the departure real-valued time. Similarly, let the departure time provided by the driver at the
th charging pole be
. The departure time interval of the EV attached to the
th pole is computed as:
. The floor rounding operator
is used to select the highest previous integer value. Meanwhile, a binary variable
is used to record the charging status of the attached EV. If an EV attached to the
th pole in time interval x is charging, the variable
= 1; otherwise
= 0. However, if
= 1, then the
can have values 0 or 1 depending on whether or not EV is charging, but if
= 0, then definitely the
= 0. All the notations used in the system model are defined in
Table 1.
As stated earlier, the purpose of the EV charging scheme is to maximize the number of EVs that have been charged during the course of the entire day and to minimize the electricity cost paid to the utility grid by participating in the DR program. Moreover, a valid charging priority scheme is integrated with the optimization problem along with an electricity preference price.
3.3. Electric Vehicle Charging Priority and Preference
A weighting parameter is formulated in order to compute the charging priority of an EV attached to the
-th charging pole. The parameter contains the capacity of the
-th pole to refill the EV battery and the remaining time to charge the battery. The EV battery’s state-of-charge (SoC) attached to the
-th pole in time interval
is denoted as
and
represents its battery capacity. Therefore, the charging time intervals required to charge the EV is computed as follows at the
-th time interval:
We define a variable rank function
for every EV that comes for charging at the smart parking lot. Although a higher rank will be given to the executive customers, they will be paying higher membership fees. Therefore, the weighted charging priority of every EV attached to the
th charging pole during the
th time interval is computed as follows, irrespective of its been charged or not:
In Equation (2), the term represents the battery capacity that needs to be filled during the stay of the parked EV up to a maximum limit of the SoC . This term also implies that an EV with a lower SoC will have greater needs for charging. In the proposed work, if an EV attached to the -th charging pole is selected to be charged, then it will be charged at the maximum charging rate of that EV. Therefore, the denominator term of the Equation (2) denotes the maximum charging energy that is provided to the EV. If the value of is low, the EV must be charged on priority before the possible departure time. The charging priority in Equation (2) is a normalized factor () because the nominator is divided by a maximum value. If an EV departs from the smart parking lot after the charging process, then the -th charging pole is set to be free by setting along with weighted charging priority factor . The charging pole will be re-activated again by setting , if another EV arrives and re-attaches to the -th charging pole and its corresponding weighted charging priority factor will be computed again using Equation (2).
It is necessary to manage the charging demand of the parked EVs within the desired time period; however, maximizing the smart parking lot profit is another important factor that must not be disregarded. Therefore, maximizing the electricity bill by utilizing dynamic electricity pricing is another important factor. Moreover, the maximum number of EVs should be charged at the time of low electricity pricing to minimize the power consumption cost. In order to model these factors, we assume that
and
are the highest and lowest rates of electricity, respectively quoted by the utility grid for the EV smart parking lot. Therefore, the
is defined as an additional parameter to represent the preference level of the
th charging pole to charge the associated EV for the electricity rate
at the
th time interval. The parameter is defined as:
In Equation (3), the value of the parameter will be high when the electricity price is low and vice versa. The denominator term is used to normalize the preference level as .
4. Optimization Technique for Cyclic (On-Off) Scheduling of Electric Vehicles
The purpose of the EV’ charge scheduling technique is to manage the charging of all attached EVs while keeping the maximum power consumption of the smart parking lot under maximum permissible demand limit. The EVs selected for charging at any time interval is based on the weighted charging priority parameter and the preferred electricity rate parameter . We defined a set to record the indices number of all the charging poles connected to an EV at the time interval while compiling a set that contains the record of the weighted charging priority parameters of every EV attached to the charging poles at the -th time interval. The purpose of this record is to evaluate each charging pole one by one to observe the preference level of each attached EV and prioritizing the EV with a high weighted charging priority number, while keeping the total charging demand below the maximum available capacity limit, including the curtailment of DR demand.
The purpose of the proposed optimization technique is to find the optimized set of EV to be charged at
th time interval. Therefore, a descending order operator (
) is applied to the set
along with its indices set
. The sorted charging pole indices with regard to the descending weighted charging priority parameters are stored in a new set
. Therefore, we assign the highest priority to the charging pole having the highest
value because the charging poles indices set
are rearranged in the descending order and the poles will be selected for charging until the limit of power capacity is reached. The set
is defined as:
The optimization of the EV charge scheduling is to enhance the number of EVs charged in a given time interval. At the present
-th time interval, an objective function needs to be maximized that is described as the product of weighted charging priority parameters
and electricity price preference level
. The expression for the objective function is formulated as:
In Equation (5), the binary variable represent the binary parameters to be optimized. The ideal EV charge scheduling is intended to increase the count of the EVs selected for charging at the given time interval as well as to reduce the electricity cost depending on the variable electricity rates governed by the utility. While the EV attached to the -th charging pole of the smart parking lot will occupy the charging pole as per time intervals , the optimization of the EV charging arrangement can be performed from the present -th time interval till the day ends, such that to ease the calculation. This is because it was evident that as mentioned in Equation (2)
Suppose
is the total power capacity bound offered to the smart parking lot for the EV charging process, excluding the DR program, and let
be the demand curbing for the DR event at the given
-th time interval. The overall charging requirement is controlled by the demand boundary limit
at the given
-th time interval, such as:
It is ensured that the minimum energy requirement of an EV for the next travelling is fulfilled. Therefore, the charging state for the EV being charged by the
-th charging section at the given
-th time interval is controlled by the lower boundary
. Moreover, the SoC of the EV is constrained by the upper boundary
to control overcharging. Assume
denotes the EV charging efficiency; therefore, the constraints applied on the charging is written as follows:
Finally, the SoC of each EV’s battery for the next time interval is calculated as:
5. Simplified Convex Relaxation Methodology
The binary optimization function is derived in Equation (5) under the inequality constraints Equations (6)–(8) and SoC update rule defined in Equation (9). In Equation (5), the binary variables include
; therefore, solving Equation (5) is a binary optimization problem. However, the nature of binary search optimization is extensive and influenced by the imprecation of dimensionality. Moreover, binary search is more complicated than linear search as it overkills for a very small number of variables/elements or provides an infeasible solution for an oversized set of variables, such as if the number of time slots
or the number of charging pole
. Furthermore, the list of the variables needs to be sorted to use the binary search algorithm, which is often unfeasible, specifically for the case when the number of variables is constantly increasing. In addition, the binary search algorithm only works for less-than inequality constraints. Therefore, based on multiple testing, we concluded that the binary optimization problem defined in Equations (5)–(8) is not solvable in real-time for the EV charging schedules. To address the aforesaid issue a simplified convex relaxation technique is applied in this paper. The simplified convex relaxation technique is a two-step process. First, the decision variable
of Equation (5), which is binary in nature, is now relaxed
to allow the decision for the charging is real-valued. Therefore, the LP is used to optimize the approximated newly defined optimization problem as follows:
The constraints for the objective function are defined as follows:
Computationally, LP is an efficient technique and does not diverge with the increase in system dimensionality and size. Therefore, we found LP more suitable for the scheduling of EV charging in real-time in our application as all variables are linear [
30]. However, a problem arises as to the relaxed variable
have fractional value output after LP optimization. With regard to the proposed on-off charging strategy, for EV charging needs to convert back the fractional values of the
to binary values 0 and 1. Therefore, in second step. A precise mapping is used to convert
to
. Moreover, the constraints defined in Equations (6)–(8) also need to be ensured by the mappings. In order to map fractional values to binary values, the charging poles indices set
is computed such that all the indices of pole having associated
values between 0 and 1 are included in set
, where
. Moreover, a new set is defined
to store the values of the variable
for all the charging poles at the
-th time interval. The indices set
and variable set
are used to apply descending order operation on the set
, such as:
In order to generate
all such poles having
are automatically selected in the matrix
. The remaining assignment of binary values in the matrix
involves the satisfaction of Equation (15).
At each time interval , the SoC of each EV is calculated using Equation (9) once the is computed.


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}