Dual Oxygen and Temperature Luminescence Learning Sensor with Parallel Inference




Abstract
:1. Introduction
2. Methods
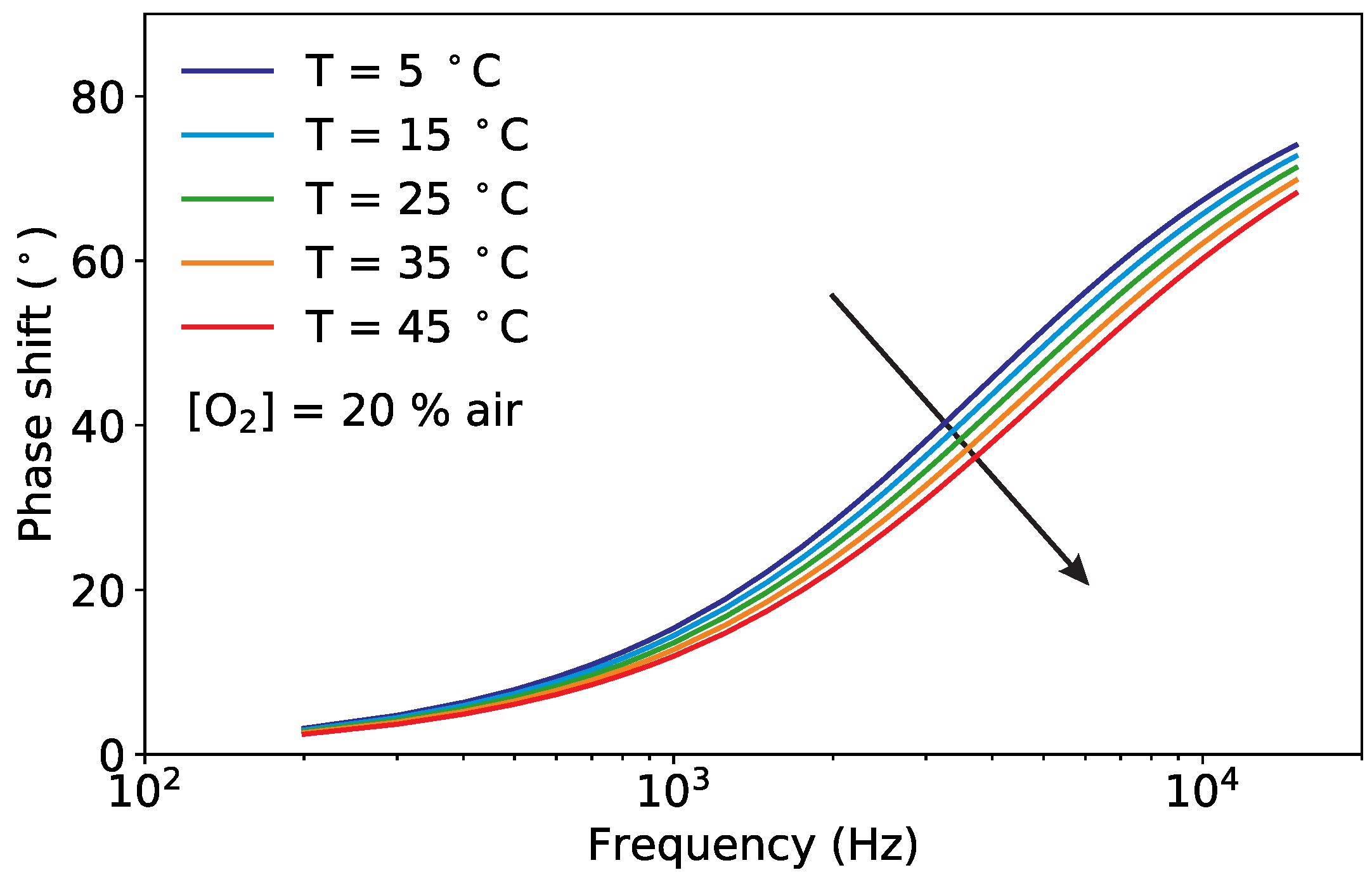
2.1. Measurement Principle
2.2. Experimental Setup and Dataset
2.3. Signal Processing Algorithm
2.4. Sensor Performance Evaluation
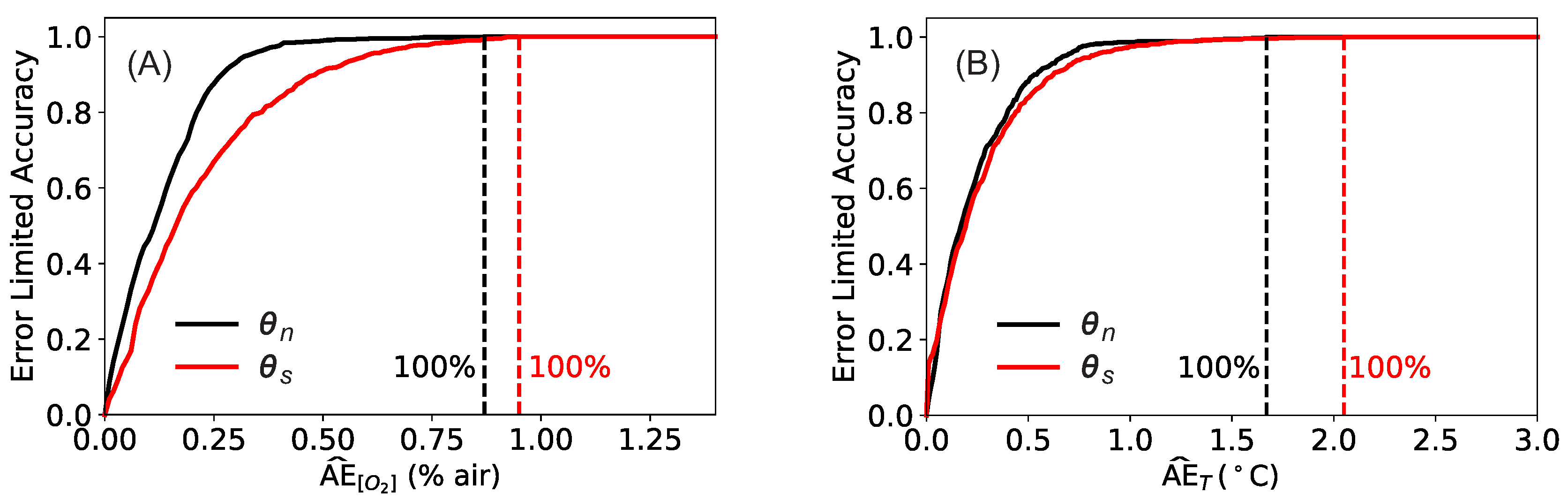
Error Limited Accuracy
3. Results and Discussion
3.1. Pt-TFPP Luminescence
3.2. Sensor Performance
3.3. Error Limited Accuracy
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SV | Stern–Volmer |
| Adam | Adaptive Moment Estimation |
| NNM | Neural Network Model |
| MAE | Mean Absolute Error |
| AE | Absolute Error |
| KDE | Kernel Density Estimate |
| ELA | Error Limited Accuracy |
References
- Stich, M.I.; Fischer, L.H.; Wolfbeis, O.S. Multiple fluorescent chemical sensing and imaging. Chem. Soc. Rev. 2010, 39, 3102–3114. [Google Scholar] [CrossRef] [PubMed]
- Borisov, S.M.; Seifner, R.; Klimant, I. A novel planar optical sensor for simultaneous monitoring of oxygen, carbon dioxide, pH and temperature. Anal. Bioanal. Chem. 2011, 400, 2463–2474. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kameya, T.; Matsuda, Y.; Egami, Y.; Yamaguchi, H.; Niimi, T. Dual luminescent arrays sensor fabricated by inkjet-printing of pressure-and temperature-sensitive paints. Sens. Actuators B Chem. 2014, 190, 70–77. [Google Scholar] [CrossRef]
- Wang, X.D.; Wolfbeis, O.S. Optical methods for sensing and imaging oxygen: Materials, spectroscopies and applications. Chem. Soc. Rev. 2014, 43, 3666–3761. [Google Scholar] [CrossRef] [Green Version]
- Santoro, S.; Moro, A.; Portugal, C.; Crespo, J.; Coelhoso, I.; Lima, J. Development of oxygen and temperature sensitive membranes using molecular probes as ratiometric sensor. J. Membr. Sci. 2016, 514, 467–475. [Google Scholar] [CrossRef]
- Biring, S.; Sadhu, A.S.; Deb, M. An Effective Optical Dual Gas Sensor for Simultaneous Detection of Oxygen and Ammonia. Sensors 2019, 19, 5124. [Google Scholar] [CrossRef] [Green Version]
- Wolfbeis, O.S. Feasibility of optically sensing two parameters simultaneously using one indicator. In Chemical, Biochemical, and Environmental Fiber Sensors II; International Society for Optics and Photonics: Bellingham, WA, USA, 1991; Volume 1368, pp. 218–222. [Google Scholar]
- Zieger, S.E.; Steinegger, A.; Klimant, I.; Borisov, S.M. TADF-Emitting Zn (II)-Benzoporphyrin: An indicator for simultaneous sensing of oxygen and temperature. ACS Sens. 2020, 5, 1020–1027. [Google Scholar] [CrossRef]
- Ohira, S.I.; Dasgupta, P.K.; Schug, K.A. Fiber optic sensor for simultaneous determination of atmospheric nitrogen dioxide, ozone, and relative humidity. Anal. Chem. 2009, 81, 4183–4191. [Google Scholar] [CrossRef]
- Collier, B.B.; McShane, M.J. Time-resolved measurements of luminescence. J. Lumin. 2013, 144, 180–190. [Google Scholar] [CrossRef]
- Stehning, C.; Holst, G.A. Addressing multiple indicators on a single optical fiber-digital signal processing approach for temperature compensated oxygen sensing. IEEE Sens. J. 2004, 4, 153–159. [Google Scholar] [CrossRef]
- Jorge, P.; Maule, C.; Silva, A.; Benrashid, R.; Santos, J.; Farahi, F. Dual sensing of oxygen and temperature using quantum dots and a ruthenium complex. Anal. Chim. Acta 2008, 606, 223–229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moore, J.P.; Higgins, C.; McGaughey, O.; Lawless, B.G.; MacCraith, B.D. Exploiting sensor cross sensitivity: Achieving temperature compensation via a dual-element optical oxygen sensor. In Advanced Environmental, Chemical, and Biological Sensing Technologies IV; International Society for Optics and Photonics: Bellingham, WA, USA, 2006; Volume 6377, p. 63770I. [Google Scholar]
- Papkovsky, D.B.; Dmitriev, R.I. Biological detection by optical oxygen sensing. Chem. Soc. Rev. 2013, 42, 8700–8732. [Google Scholar] [CrossRef] [PubMed]
- Lakowicz, J.R. Principles of Fluorescence Spectroscopy, 3rd ed.; Springer: New York, NY, USA, 2006. [Google Scholar]
- Li, F.; Wei, Y.; Chen, Y.; Li, D.; Zhang, X. An intelligent optical dissolved oxygen measurement method based on a fluorescent quenching mechanism. Sensors 2015, 15, 30913–30926. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, W.; McDonough, R.C.; Langsdorf, B.; Demas, J.; DeGraff, B. Oxygen sensors based on luminescence quenching: Interactions of metal complexes with the polymer supports. Anal. Chem. 1994, 66, 4133–4141. [Google Scholar] [CrossRef]
- Draxler, S.; Lippitsch, M.E.; Klimant, I.; Kraus, H.; Wolfbeis, O.S. Effects of polymer matrixes on the time-resolved luminescence of a ruthenium complex quenched by oxygen. J. Phys. Chem. 1995, 99, 3162–3167. [Google Scholar] [CrossRef]
- Hartmann, P.; Trettnak, W. Effects of polymer matrices on calibration functions of luminescent oxygen sensors based on porphyrin ketone complexes. Anal. Chem. 1996, 68, 2615–2620. [Google Scholar] [CrossRef]
- Mills, A. Controlling the sensitivity of optical oxygen sensors. Sens. Actuators B Chem. 1998, 51, 60–68. [Google Scholar] [CrossRef]
- Badocco, D.; Mondin, A.; Pastore, P.; Voltolina, S.; Gross, S. Dependence of calibration sensitivity of a polysulfone/Ru (II)-Tris (4, 7-diphenyl-1, 10-phenanthroline)-based oxygen optical sensor on its structural parameters. Anal. Chim. Acta 2008, 627, 239–246. [Google Scholar] [CrossRef]
- Dini, F.; Martinelli, E.; Paolesse, R.; Filippini, D.; D’Amico, A.; Lundström, I.; Di Natale, C. Polymer matrices effects on the sensitivity and the selectivity of optical chemical sensors. Sens. Actuators B Chem. 2011, 154, 220–225. [Google Scholar] [CrossRef]
- Argyriou, A.; Evgeniou, T.; Pontil, M. Multi-task feature learning. In Proceedings of the 19th International Conference on Neural Information Processing Systems (NIPS’06), Vancouver, BC, Canada, 4–7 December 2006. [Google Scholar]
- Thrun, S. Is learning the n-th thing any easier than learning the first? In Proceedings of the 8th International Conference on Neural Information Processing Systems (NIPS’95), Denver, CO, USA, 27 November 1995; pp. 640–646. [Google Scholar]
- Caruana, R. Multitask learning. Mach. Learn. 1997, 28, 41–75. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Q. A survey on multi-task learning. arXiv 2017, arXiv:1707.08114. [Google Scholar]
- Baxter, J. A model of inductive bias learning. J. Artif. Intell. Res. 2000, 12, 149–198. [Google Scholar] [CrossRef]
- Thung, K.H.; Wee, C.Y. A brief review on multi-task learning. Multimed. Tools Appl. 2018, 77, 29705–29725. [Google Scholar] [CrossRef]
- Michelucci, U.; Venturini, F. Multi-task learning for multi-dimensional regression: Application to luminescence sensing. Appl. Sci. 2019, 9, 4748. [Google Scholar] [CrossRef] [Green Version]
- Carraway, E.; Demas, J.; DeGraff, B.; Bacon, J. Photophysics and photochemistry of oxygen sensors based on luminescent transition-metal complexes. Anal. Chem. 1991, 63, 337–342. [Google Scholar] [CrossRef]
- Demas, J.N.; DeGraff, B.; Xu, W. Modeling of luminescence quenching-based sensors: Comparison of multisite and nonlinear gas solubility models. Anal. Chem. 1995, 67, 1377–1380. [Google Scholar] [CrossRef]
- Michelucci, U.; Baumgartner, M.; Venturini, F. Optical oxygen sensing with artificial intelligence. Sensors 2019, 19, 777. [Google Scholar] [CrossRef] [Green Version]
- Ogurtsov, V.I.; Papkovsky, D.B. Modelling of phase-fluorometric oxygen sensors: Consideration of temperature effects and operational requirements. Sens. Actuators B Chem. 2006, 113, 917–929. [Google Scholar] [CrossRef]
- Lo, Y.L.; Chu, C.S.; Yur, J.P.; Chang, Y.C. Temperature compensation of fluorescence intensity-based fiber-optic oxygen sensors using modified Stern–Volmer model. Sens. Actuators B Chem. 2008, 131, 479–488. [Google Scholar] [CrossRef]
- Zaitsev, N.; Melnikov, P.; Alferov, V.; Kopytin, A.; German, K. Stable optical oxygen sensing material based on perfluorinated polymer and fluorinated platinum (II) and palladium (II) porphyrins. Procedia Eng. 2016, 168, 309–312. [Google Scholar] [CrossRef]
- Venturini, F.; Michelucci, U.; Baumgartner, M. Dual oxygen and temperature sensing with single indicator using multi-task-learning neural networks. In Optical Sensing and Detection VI; Berghmans, F., Mignani, A.G., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2020; Volume 11354, pp. 212–218. [Google Scholar]
- Michelucci, U. Applied Deep Learning—A Case-Based Approach to Understanding Deep Neural Networks; APRESS Media, LLC: New York, NY, USA, 2018. [Google Scholar]
- Kingma, D.P.; Ba, J.A. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015; pp. 1–15. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Epochs/Batch Size | ||
|---|---|---|---|
| 20’000/no batch | 2.4% air | 3.6 °C | |
| 20’000/32 | 1.4% air | 1.6 °C | |
| 100’000/32 | 0.22% air | 0.27 °C | |
| 20’000/32 | 0.13% air | 0.24 °C |
| Input | Epochs/Batch Size | ||
|---|---|---|---|
| 100’000/32 | 0.95% air | 2.1 °C | |
| 20’000/32 | 0.87% air | 1.7 °C |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venturini, F.; Michelucci, U.; Baumgartner, M. Dual Oxygen and Temperature Luminescence Learning Sensor with Parallel Inference. Sensors 2020, 20, 4886. https://doi.org/10.3390/s20174886
Venturini F, Michelucci U, Baumgartner M. Dual Oxygen and Temperature Luminescence Learning Sensor with Parallel Inference. Sensors. 2020; 20(17):4886. https://doi.org/10.3390/s20174886
Chicago/Turabian StyleVenturini, Francesca, Umberto Michelucci, and Michael Baumgartner. 2020. "Dual Oxygen and Temperature Luminescence Learning Sensor with Parallel Inference" Sensors 20, no. 17: 4886. https://doi.org/10.3390/s20174886
APA StyleVenturini, F., Michelucci, U., & Baumgartner, M. (2020). Dual Oxygen and Temperature Luminescence Learning Sensor with Parallel Inference. Sensors, 20(17), 4886. https://doi.org/10.3390/s20174886