Comparison of Time Domain and Frequency-Wavenumber Domain Ultrasonic Array Imaging Algorithms for Non-Destructive Evaluation


Abstract
:1. Introduction
2. Overview of Ultrasound Imaging Algorithms Compared
2.1. TFM Imaging Algorithm
2.2. Wavenumber Imaging Algorithm
2.3. Time Domain PWI Algorithm
2.4. Lu’s f-k Domain PWI Algorithm
3. Experimental Setup and Simulation Model
3.1. Experimental Setup
3.2. Simulation Model
4. The Selection of Imaging Parameters
4.1. Image Grid Definition in the Frequency Domain Algorithms
4.2. Angle Parameters of the Transmitted Plane Waves in the PWI Algorithms
4.2.1. Case for the PWI Algorithms on the Aluminium Specimen
4.2.2. Case for the PWI Algorithms on the Copper Specimen
5. Imaging Performance Comparison
5.1. Computational Time
5.2. Image Algorithm Defect Location Performance Comparison for the Aluminium Specimen
5.3. Image Algorithm Defect Location Performance Comparison for the Copper Specimen
6. Conclutions
- In order to reduce image artefacts, in the wavenumber and f-k domain PWI imaging algorithms, the pixel size in the array lateral direction is required to be less than a half of the pitch of an array element while that in the depth direction less than a half of the ratio between the wave speed and the highest frequency of the transmitted signals.
- The API performance in the PWI algorithms depends on the subtended angle between an image point and the ends of an array and can be predicted using the proposed simulation model in the single scattering regime. However, when the multiple scattering occurs, the image of the defect is distorted and the SNR is reduced, often making the API unsuitable used for selecting imaging parameters.
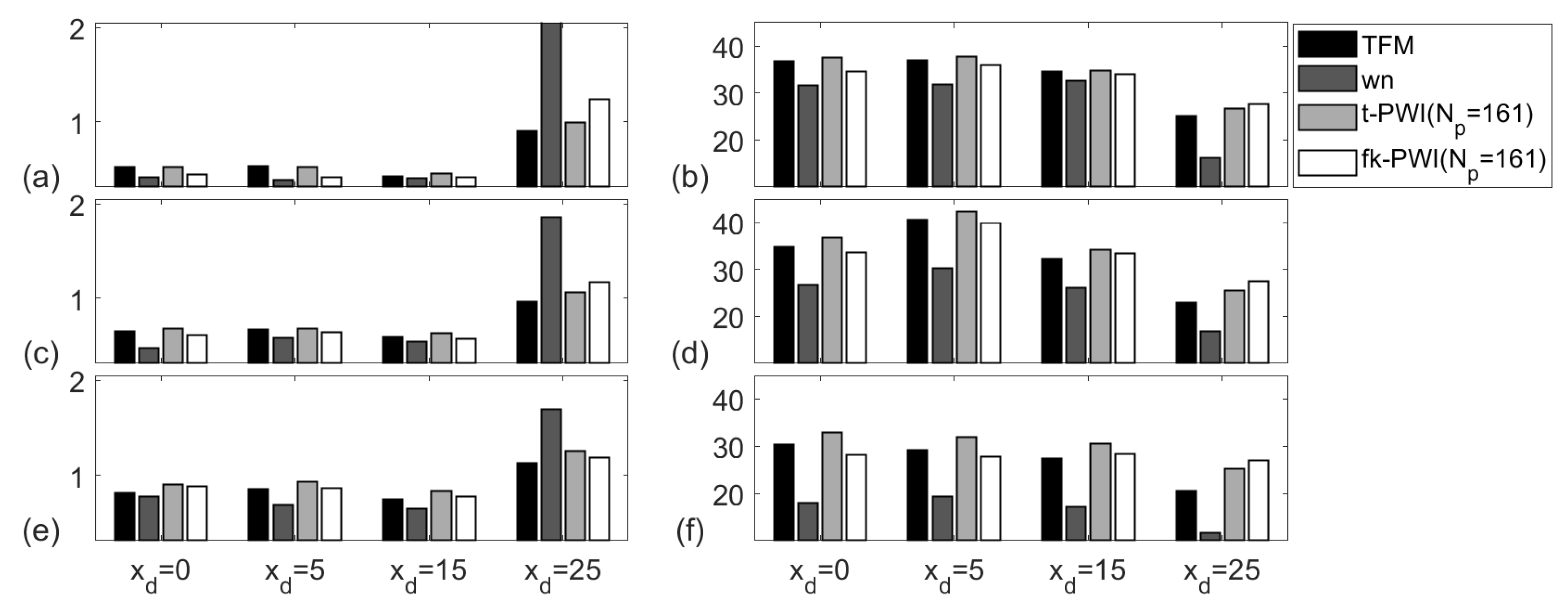
- There is no optimal value for the number of plane waves but the choice of number of plane waves is a compromise between detection performance (maximise SNR) and inspection time (minimise the number of firings). When number of plane waves is high, e.g., Np = 161, for low noise material, all chosen imaging algorithms have similar SNR performance, i.e., all SNRs within 5 dB. However, for high noise material, the TFM imaging algorithm, the time domain PWI algorithm and the f-k domain PWI algorithm have similar performance with SNR at least 5 dB higher than that obtained using the wavenumber imaging algorithm.
- 5 plane waves can be used for imaging low noise materials, e.g., aluminium specimens with SNR above 25 dB for a 1 mm SDH defect. However, for imaging materials with high backscattering, e.g., copper specimens, the multiple scattering distorted the API and 21 plane waves were required to achieve SNR greater than 25 dB for a 2 mm SDH defect.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Drinkwater, B.W.; Wilcox, P.D. Ultrasonic arrays for non-destructive evaluation: A review. NDT E Int. 2006, 39, 525–541. [Google Scholar] [CrossRef]
- Jensen, J.A.; Nikolov, S.I.; Gammelmark, K.L.; Pedersen, M.H. Synthetic aperture ultrasound imaging. Ultrasonics 2006, 44, e5–e15. [Google Scholar] [CrossRef] [PubMed]
- Holmes, C.; Drinkwater, B.W.; Wilcox, P.D. Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation. NDT E Int. 2005, 38, 701–711. [Google Scholar] [CrossRef]
- Montaldo, G.; Tanter, M.; Bercoff, J.; Benech, N.; Fink, M. Coherent plane-wave compounding for very high frame rate ultrasonography and transient elastography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 489–506. [Google Scholar] [CrossRef]
- Weston, M.; Mudge, P.; Davis, C.; Peyton, A. Time efficient auto-focussing algorithms for ultrasonic inspection of dual-layered media using full matrix capture. NDT E Int. 2012, 47, 43–51. [Google Scholar] [CrossRef]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Efficient immersion imaging of components with nonplanar surfaces. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 1284–1295. [Google Scholar] [CrossRef]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D.; Hunter, A.J. Defect detection using ultrasonic arrays: The multi-mode total focusing method. NDT E Int. 2010, 42, 123–133. [Google Scholar] [CrossRef]
- Sutcliffe, M.; Weston, M.; Dutton, B.; Charlton, P.; Donne, K. Real-time full matrix capture for ultrasonic non-destructive testing with acceleration of post-processing through graphic hardware. NDT E Int. 2012, 51, 16–23. [Google Scholar] [CrossRef]
- Wang, C.; Mao, J.; Leng, T.; Zhuang, Z.Y.; Wang, X.M. Efficient acceleration for total focusing method based on advanced parallel computing in FPGA. Int. J. Acoust. Vib. 2017, 22, 536–540. [Google Scholar] [CrossRef]
- Le Jeune, L.; Robert, S.; Villaverde, E.L.; Prada, C. Plane wave imaging for ultrasonic non-destructive testing: Generalization to multimodal imaging. Ultrasonics 2016, 64, 128–138. [Google Scholar] [CrossRef] [Green Version]
- Le Jeune, L.; Robert, S.; Prada, C. Plane wave imaging for ultrasonic inspection of irregular structures with high frame rates. AIP Conf. Proc. 2016, 1706, 020010. [Google Scholar]
- Stolt, R.H. Migration by Fourier transform. Geophysics 1978, 43, 23–48. [Google Scholar] [CrossRef]
- Lu, J. 2D and 3D high frame rate imaging with limited diffraction beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 839–856. [Google Scholar] [CrossRef]
- Cheng, J.; Lu, J. Extended high-frame rate imaging method with limited-diffraction beams. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 880–899. [Google Scholar] [CrossRef]
- Garcia, D.; Le Tarnec, L.; Muth, S.; Montagnon, E.; Porée, J.; Cloutier, G. Stolt’s f-k migration for plane wave ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1853–1867. [Google Scholar] [CrossRef] [Green Version]
- Stepinski, T. An implementation of synthetic aperture focusing technique in frequency domain. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 1399–1408. [Google Scholar] [CrossRef]
- Skjelvareid, M.H.; Olofsson, T.; Birkelund, Y.; Larsen, Y. Synthetic aperture focusing of ultrasonic data from multilayered media using an omega-K algorithm. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 1037–1048. [Google Scholar] [CrossRef] [Green Version]
- Hunter, A.J.; Drinkwater, B.W.; Wilcox, P.D. The wavenumber algorithm for full-matrix imaging using an ultrasonic array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2450–2462. [Google Scholar] [CrossRef]
- Moghimirad, E.; Hoyos, C.A.V.; Mahloojifar, A.; Asl, B.M.; Jensen, J.A. Synthetic aperture ultrasound Fourier beamformation using virtual sources. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 2018–2030. [Google Scholar] [CrossRef]
- Velichko, A.; Wilcox, P.D. An analytical comparison of ultrasonic array imaging algorithms. J. Acoust. Soc. Am. 2010, 127, 2377–2384. [Google Scholar] [CrossRef]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Comparison of ultrasonic array imaging algorithms for nondestructive evaluation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1732–1745. [Google Scholar] [CrossRef] [PubMed]
- Pamel, A.V.; Brett, C.R.; Lowe, M.J.S. A methodology for evaluating detection performance of ultrasonic array imaging algorithms for coarse-grained materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 2042–2053. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Merabet, L.; Robert, S.; Prada, C. 2-D and 3-D Reconstruction Algorithms in the Fourier Domain for Plane-Wave Imaging in Nondestructive Testing. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 64, 772–788. [Google Scholar] [CrossRef] [PubMed]
- Schmerr, L.W. Chapter 8-Ultrasonic Transducer Radiation. In Fundamentals of Ultrasonic Nondestructive Evaluation—A Modeling Approach; Plenum Press: New York, NY, USA, 1998. [Google Scholar]
- Miller, F.G.; Pursey, H. The field and radiation impedance of mechanical radiators on the free surface of a semi-infinite isotropic solid. Proc. R. Soc. Lond. 1954, 223, 521–541. [Google Scholar]
- Zhang, J.; Song, Y.; Li, X.; Zhong, C. Comparison of experimental measurements of material grain size using ultrasound. J. Nondestruct. Eval. 2020, 39, 30. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Defect characterization using an ultrasonic array to measure the scattering coefficient matrix. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2254–2265. [Google Scholar] [CrossRef]
- Lopez-Sanchez, A.L.; Kim, H.J.; Schmerr, L.W.; Sedov, A. Measurement models and scattering models for predicting the ultrasonic pulse-echo response from side-drilled holes. J. Nondestruct. Eval. 2005, 24, 83–96. [Google Scholar] [CrossRef]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Effects of array transducer inconsistencies on total focusing method imaging performance. NDT E Int. 2011, 44, 361–368. [Google Scholar] [CrossRef]
- Kosloff, D.D. Forward modeling by a Fourier method. Geophysics 1982, 47, 1402–1412. [Google Scholar] [CrossRef] [Green Version]
- Velichko, A.; Croxford, A.J. Strategies for data acquisition using ultrasonic phased arrays. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20180451. [Google Scholar] [CrossRef] [Green Version]
- Velichko, A. Quantification of the effect of multiple scattering on array imaging performance. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 92–105. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of elements, | 64 |
| Element width (mm) | 0.53 |
| Element pitch, p (mm) | 0.63 |
| Element length (mm) | 15 |
| Central frequency (MHz) | 5 |
| Bandwidth(−6 dB) (MHz) | 3–7 |
| Defect Location (mm) | Degree () | |||
|---|---|---|---|---|
| SNR(dB) | ||||
| 57 | 57 | 5.7 | 47 | |
| 66 | 66 | 5.2 | 50 | |
| 76 | 72 | 3.6 | 53 | |
| 79 | 75 | 1.9 | 42 | |
| 40 | 38 | 3.9 | 62 | |
| 52 | 50 | 3.6 | 60 | |
| 61 | 58 | 2.9 | 59 | |
| 68 | 63 | 2.1 | 40 | |
| 30 | 23 | 2.8 | 61 | |
| 41 | 38 | 2.7 | 60 | |
| 48 | 46 | 2.3 | 48 | |
| 56 | 53 | 1.9 | 37 | |
| Defect Location (mm) | Degree () | |||
|---|---|---|---|---|
| SNR(dB) | ||||
| 37 | 63 | 6.3 | 26 | |
| 30 | 66 | 6.2 | 29 | |
| 29 | 74 | 5.0 | 32 | |
| 62 | 77 | 2.5 | 24 | |
| 27 | 53 | 5.3 | 31 | |
| 27 | 59 | 5.2 | 37 | |
| 24 | 67 | 4.3 | 31 | |
| 33 | 72 | 2.7 | 24 | |
| 28 | 42 | 4.2 | 29 | |
| 20 | 48 | 4.1 | 29 | |
| 23 | 58 | 3.5 | 28 | |
| 46 | 64 | 2.6 | 22 | |
| Operation | Imaging Algorithms | |||
|---|---|---|---|---|
| TFM | Wavenumber | Time Domain PWI | f-k Domain PWI | |
| 1-D interpolation | ||||
| 2-D interpolation | ||||
| 3-D FFT | ||||
| 2-D FFT | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, Z.; Zhang, J.; Lian, G.; Drinkwater, B.W. Comparison of Time Domain and Frequency-Wavenumber Domain Ultrasonic Array Imaging Algorithms for Non-Destructive Evaluation. Sensors 2020, 20, 4951. https://doi.org/10.3390/s20174951
Zhuang Z, Zhang J, Lian G, Drinkwater BW. Comparison of Time Domain and Frequency-Wavenumber Domain Ultrasonic Array Imaging Algorithms for Non-Destructive Evaluation. Sensors. 2020; 20(17):4951. https://doi.org/10.3390/s20174951
Chicago/Turabian StyleZhuang, Zeyu, Jie Zhang, Guoxuan Lian, and Bruce W. Drinkwater. 2020. "Comparison of Time Domain and Frequency-Wavenumber Domain Ultrasonic Array Imaging Algorithms for Non-Destructive Evaluation" Sensors 20, no. 17: 4951. https://doi.org/10.3390/s20174951