1. Introduction
The vibration-based damage detection technique is among the promising techniques employed in the field of structural health monitoring. Generally speaking, it assumes that damage will alter the stiffness of a structure, which in turn will alter the measured dynamic responses of the structure. Although many approaches for detecting damage to structures in controlled laboratory environments have been successfully developed, the performance of these approaches in the field remains uncertain and requires validation. One of the main issues affecting the application of such techniques in the field that must be addressed is the effects of varying environmental conditions [
1,
2,
3]. Many studies have reported that the variations in structural features due to varying environmental conditions such as temperature, boundary conditions, loading conditions, humidity, and wind speed can be much larger than those caused by structural damage [
4,
5,
6]. In order to accommodate such environmental effects, it is very important to examine the influences of varying environmental conditions to acquire insight into these critical and complicated phenomena.
The majority of previous studies that have investigated such environmental effects have focused on bridge structures [
7,
8,
9,
10]. Some, however, have focused on buildings [
11,
12,
13,
14], especially ancient towers [
15,
16,
17], and wind turbines [
18,
19]. Numerous field test conducted in such studies of the effects of environmental factors on these structures have indicated that temperature is the major factor that affects the natural frequencies of these structures [
5,
6,
8,
13]. It has also been found that temperature may affect modal frequencies in different ways for different mode shape patterns, e.g., bending modes, torsional modes, and local modes [
15,
16], especially the higher modes [
16]. Meanwhile, increases in vibration intensity have been reported to cause decreases in modal frequencies [
12,
17,
20]. Using data for Canton Tower, Zhang et al. observed that modal frequencies have a slightly descending trend with increasing temperature, wind speed, and vibration amplitude [
21].
As for power transmission towers (PTTs), only a few studies of such environmental effects have been conducted. Huang et al. [
22] recently installed an acceleration sensor and a meteorological sensor on a transmission tower located on the Xi’an Polytechnic University campus in order to measure the vibration responses and environmental parameters of the tower over the course of one week. They observed that the modal frequencies decreased as the temperature increased, and found that this relationship was quite linear. In another recent study, Huang et al. [
23] developed an on-line monitoring system to collect data regarding the stresses affecting the post elements of a PTT, as well as ambient temperature and wind speed data, but no dynamic vibration data was collected in that study. Moreover, no analytical results using long-term data measured by the system developed by Huang et al. have yet been published. Zhang et al. used finite element analysis to study the wind-induced coupling vibration effects of PTT-line systems, and they concluded that wind speed plays an important role in the tower-line coupling effect. After a lab test, Carvalho et al. [
24] installed a monitoring system including an accelerometer, swing angle sensor, digital camera, solar radiation sensor, temperature sensor, 3D wind speed sensor, and atmospheric pressure sensor on a PTT. However, as with the system developed by Huang et al., no analytical results for the system developed by Carvalho et al. have yet been reported in the literature.
Note that although a PTT is connected to other PTTs via cables, the cables are hanging on the PTTs via insulators. In normal conditions, little horizontal stiffness is contributed by the hanging cables. In addition, no sensors are allowed to be installed on the cables due to safety concerns. Therefore, there is no measurement system covering both towers and cables or two towers in the literature. Based on the literature review above, it seems reasonable to conclude that although the research community has started to pay greater attention to the long-term monitoring of PTTs, the effects of environmental factors on the properties of PTT structures have yet to be adequately investigated.
Because the manipulation of the excitation forces exerted on PTTs is not feasible due to the dangerous high-voltage electricity involved and various other practical issues, only output-only modal analysis (OMA) using ambient vibration measurements is suitable for identifying the modal parameters of PTTs. Stochastic subspace identification (SSI) is one of the most popular techniques of OMA, and has been verified as one of the techniques that provides the most accurate identification of natural frequencies and mode shapes even with high noise levels [
25]. The SSI algorithm uses the projections of the future response onto the previous input/output response [
26], and is very useful for modal identification of output-only systems subject to ambient vibration [
27]. For the long-term monitoring of a PTT, large amounts of data need to be analyzed. If a high number of user interactions are required during the analysis process, then relatively large analysis times and costs will be required. Hence, the structural health monitoring of PTTs could be rendered impractical since such monitoring generally requires large amounts of data need to be processed in a short amount of time. As a result, automated modal parameter estimation is preferred for long-term monitoring. In this study, the fully automated, three-stage clustering approach for OMA developed by Reynders et al. [
28] was employed. Using this automated OMA technique and no user interactions, this study sought to identify the modal parameters of a PTT installed with vibration sensors and meteorological sensors for long-term monitoring. Through the long-term monitoring data, which included data for one typhoon event, this study investigated the effects of the environment in general and the typhoon in particular on the identified modal frequencies.
2. Investigated Power Transmission Tower and Its Monitoring System
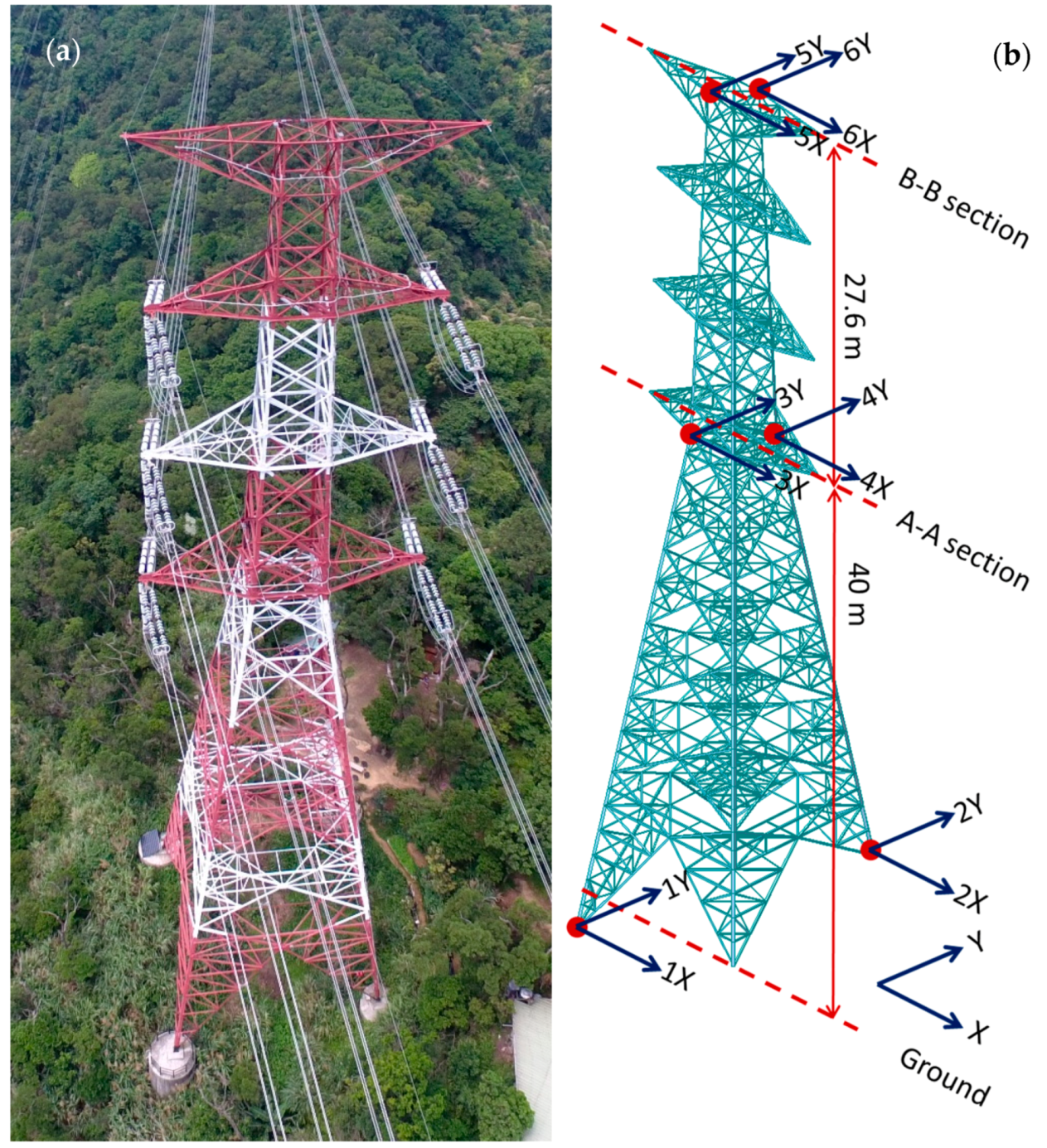
The investigated PTT structure was a G4-345 kV strain tower (
Figure 1a). Because the PTT structure is located on the slope of a hill in New Taipei City, Taiwan, the lengths of its legs are different. Unlike bridges and buildings, there are almost no human activities occurring on the PTT under normal operational conditions. Moreover, it is located in an isolated area; hence, even human activities in the surrounding area are rare. The major excitation source affecting the PTT is probably the wind. One temperature sensor, one wind speed sensor, and one wind direction sensor were installed on the top of the PTT, as shown in
Figure 2a,b. In addition, two forced-balanced accelerometers (Kinemetrics FBA-11) for each horizontal direction were installed in two positions at each of three different elevations. As such, a total of 12 degree of freedoms (DOFs) of acceleration were measured. The typical installation of the accelerometers at one of the points at the top elevation is shown in
Figure 2c. The noise level of the accelerometer was approximately 0.0025 m/s
2. The locations and directions of these sensors are also marked in
Figure 1b. The Y-direction is longitudinal direction (parallel to the cables) while the X-direction is transverse direction. Note that although the accelerometers are mounted only on the tower, the vibration signals due to interaction between the tower and the cables can still be measured. If there is any vibration signal of the whole system is measured, the identified modal frequencies will reflect the behaviour of the system.
The data acquisition system used was a 16-bit system, as shown in
Figure 2d. The data was transmitted via 4G high-speed wireless networks, as shown in
Figure 2e. The entire monitoring system was powered by a system power set comprising batteries and solar panels, as shown in
Figure 2f. Since no powered network connection was available, in order to minimize the power consumption of the monitoring system, the acceleration signals were recorded only during the first ten minutes of each hour with a 256 Hz sampling rate, while the maximum wind speed and temperature measurements during the same ten minutes were recorded every hour.
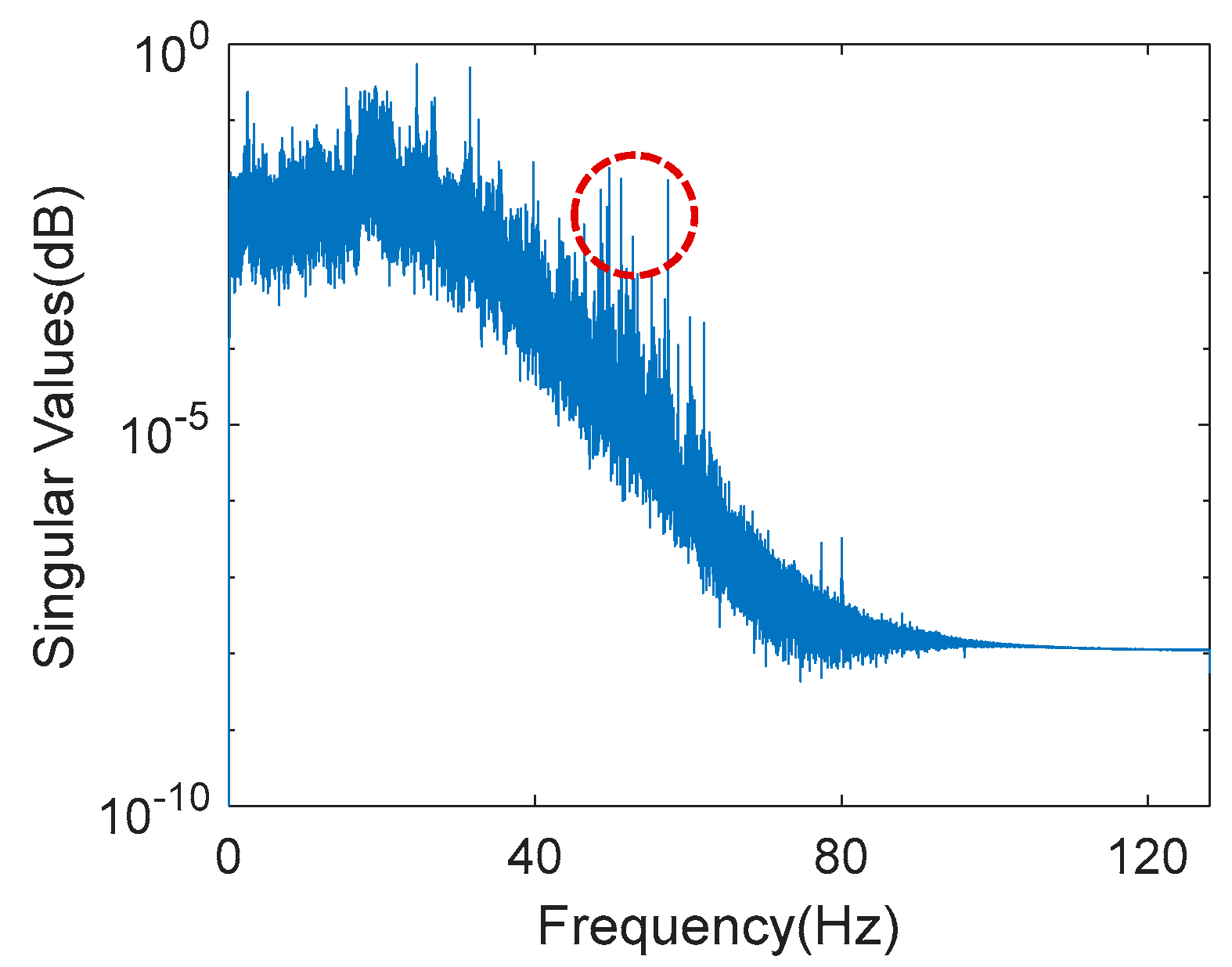
Figure 3 shows the singular value plot of the frequency domain decomposition of all the channels of a typical acceleration record when the tower was subjected to normal wind speed. The electric noise at approximately 50–60 Hz is indicated by the circle. Besides, it is also evident there is little content of data with a frequency higher than 40 Hz. Therefore, the original signals were resampled to 80 Hz and a 11th order of Butterworth filter with 32 Hz cut-off frequency was used to prevent aliasing effect after resampling. The operation of the monitoring system was started on 8 March, 2017, and the data collected by the system from then until 31 December, 2017, were used in this study. It should be noted, however, that the collection of data was interrupted during several periods due to technical problems such as low battery power and the system being shut down. The longest period of interruption was from 11 June through 5 July.
4. Continuous Monitoring of Modal Frequencies
Although approximately 20 modes could be identified with the automated modal analysis, unfortunately, due to varying environmental and excitation conditions, as well as the complexity of the PTT structure, these modes could not be successfully identified for every dataset. Hence, we needed to select the target modes for the investigation of the environmental and typhoon effects on these modes. In the current section, the procedure used to select the target modes to be investigated will be explained.
First of all, when the wind force is low, the vibration of the PTT is quite small, resulting in a signal-to-noise ratio that is also quite small. The quality of the identified modes would be quite poor using such a dataset. The root-mean-square (RMS) value of the 10-min acceleration measurements in two directions of one of the accelerometers in the B-B section (
Figure 1b) is calculated to serve as an indication of the structural acceleration response level. The datasets with RMS acceleration values smaller than 0.006 m/s are excluded, and as a result, a total of 4647 datasets are available.
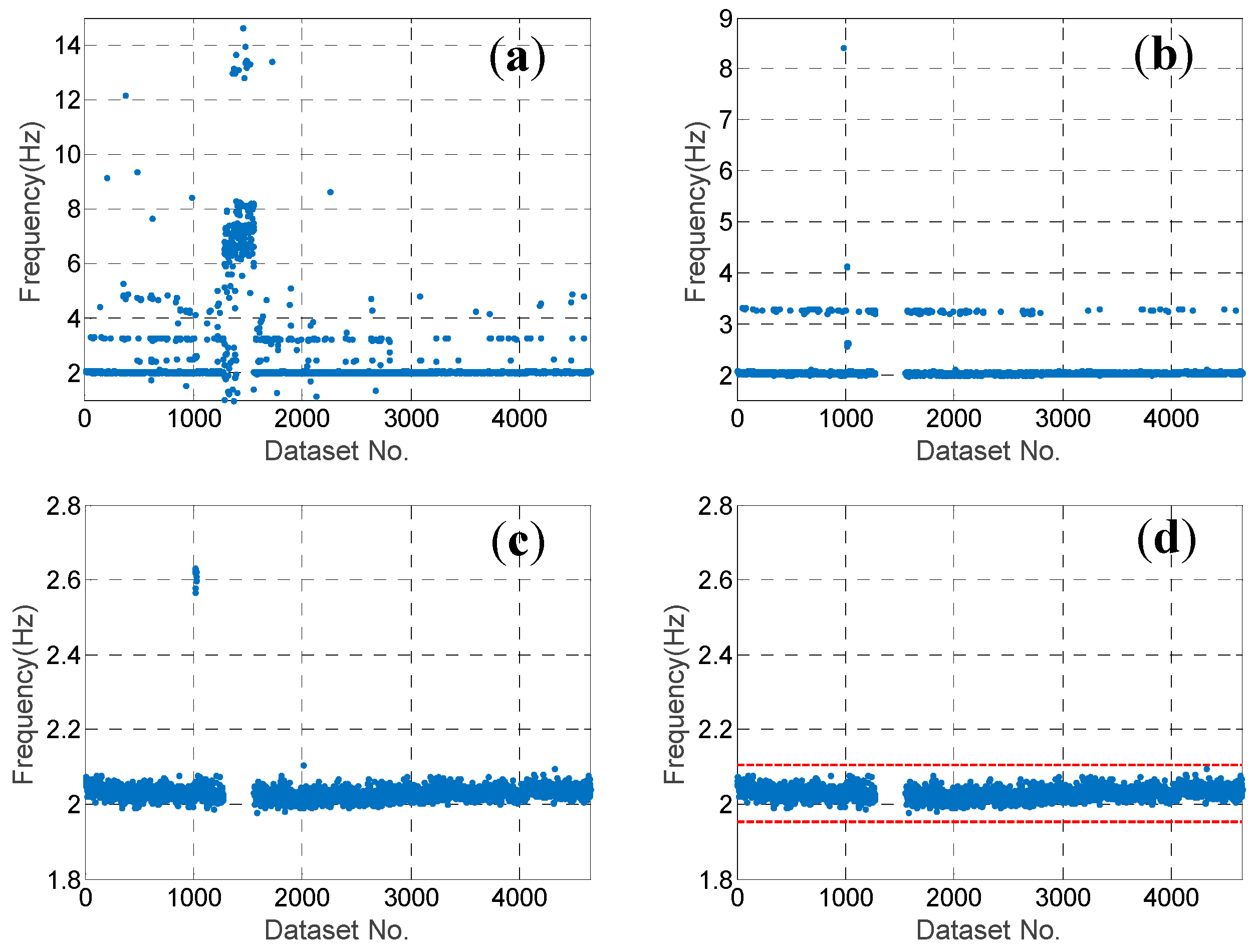
In order to track the identified modes automatically, we developed a procedure to screen out a candidate mode from all of the identified modes through all of the datasets. The candidate modes with relatively high identifiability were designated as the target modes to be studied in order to understand the environmental and typhoon effects. This process contained four steps. In the first step, a target mode with modal frequency
and mode shape
identified using one typical dataset were selected. The similarity coefficient between the candidate mode and the mode identified using the other dataset is defined as follows:
where
represents the absolute difference ratio of two modal frequencies;
represents the
ith mode out of N modes identified using the other dataset;
represents the similarity between the two modes; and
and
represent the weighting coefficient of
and (1-
), respectively. In this study,
and
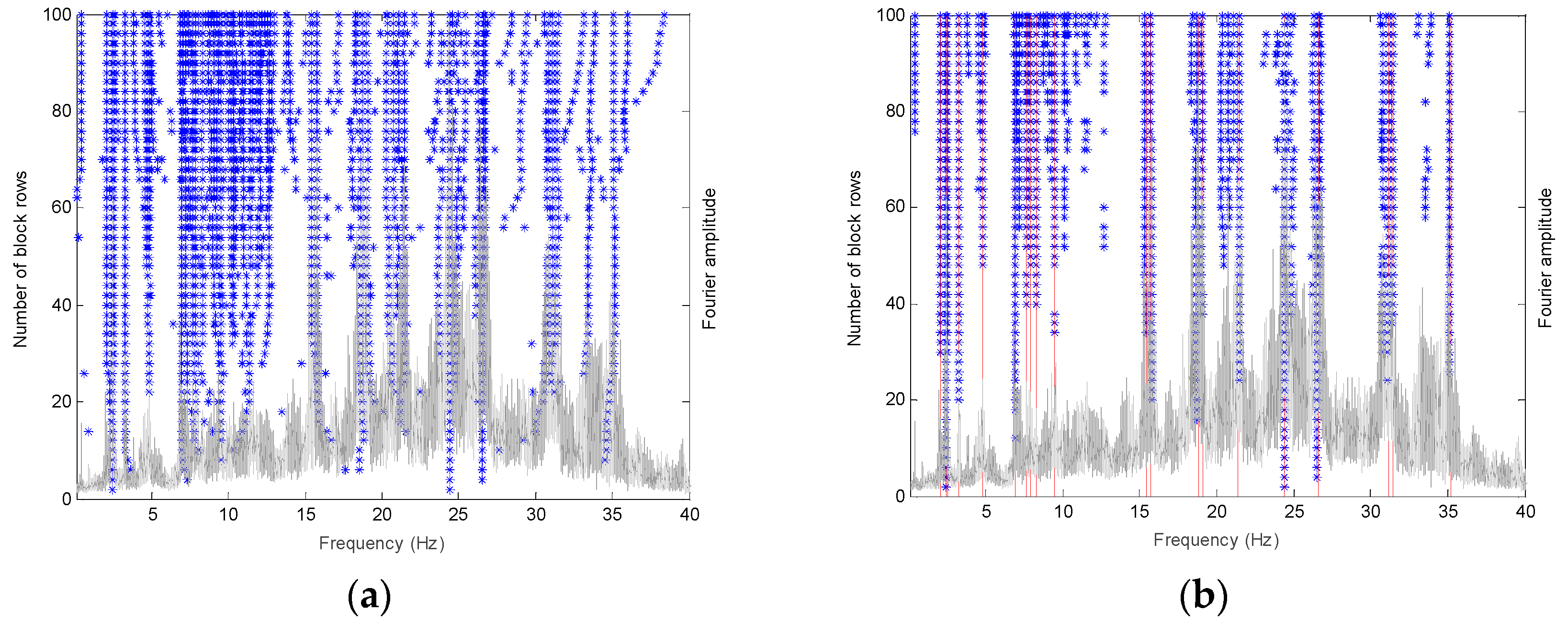
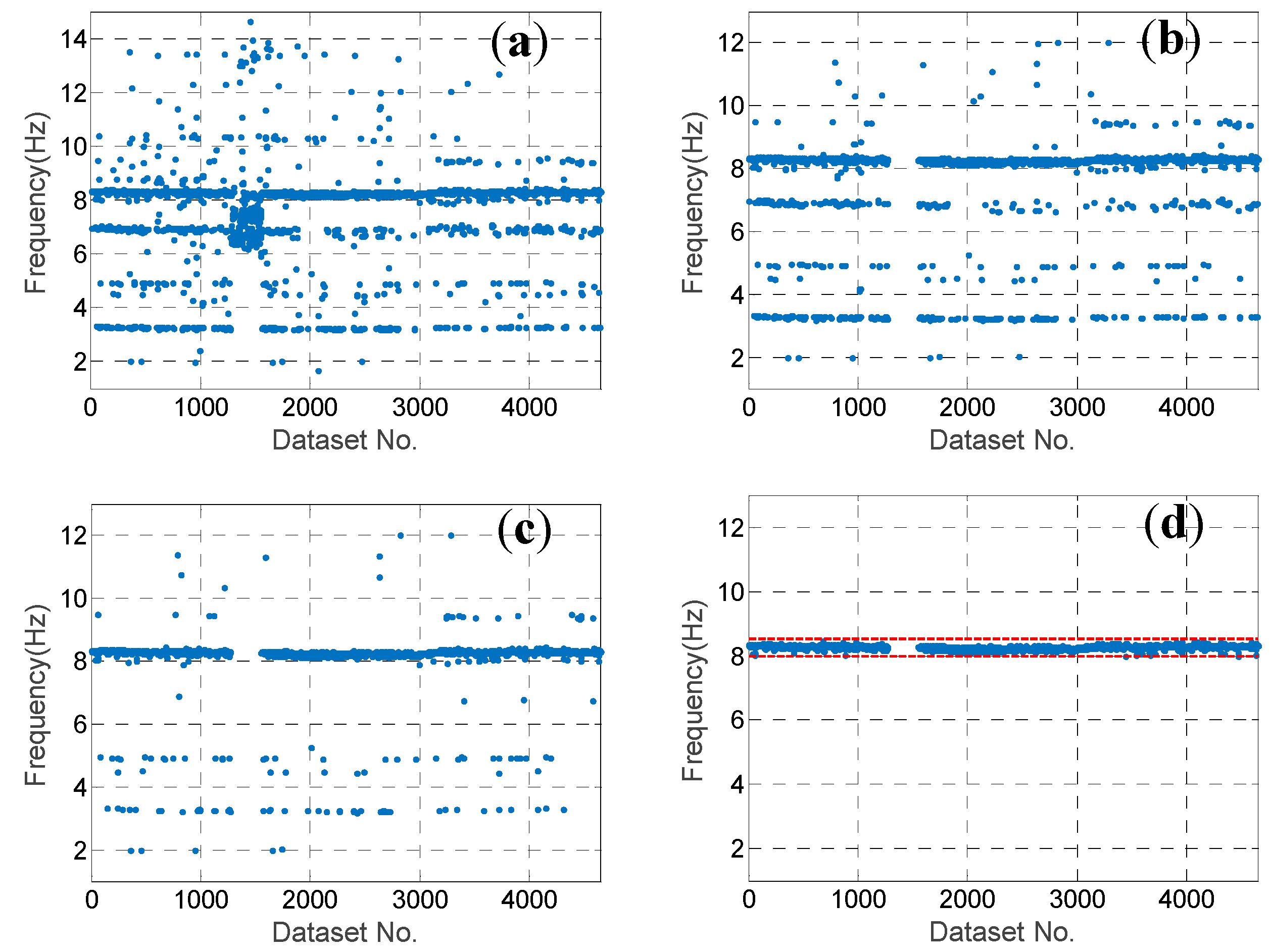
are designated as 0.4 and 0.6, respectively. Note that the number of modes N identified using different datasets could be different, although the number was approximately 20 for most of the datasets. For each candidate mode, the mode with the largest similarity coefficient in every dataset was selected. The typical results of two modes, i.e., 2.03 Hz and 8.26 Hz, are illustrated in
Figure 7a and
Figure 8a, respectively. Note that for many datasets, the selected mode with the largest similarity coefficient could evidently be the wrong one. This is because for these datasets, the candidate mode is not identified.
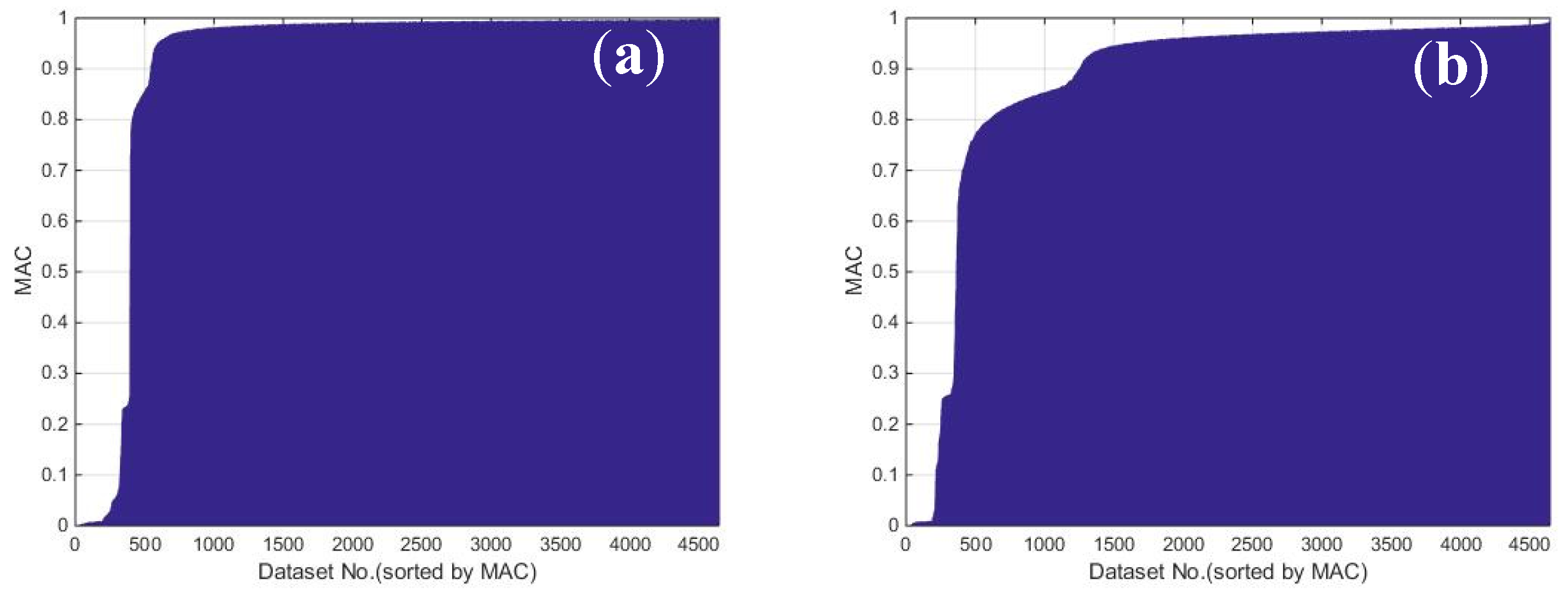
In order to eliminate the wrong modes from among the selected ones, three more steps were employed. In the second step, the
values between the candidate mode and the selected modes were investigated. The sorted
values of the two typical candidate modes are shown in
Figure 9. It can be observed that there was a platform with a
value larger than 0.85, which means that for most of the selected modes, the
value was larger than 0.85. Hence, we eliminated the selected modes with
values smaller than 0.85, and the typical results of two modes after the second step are shown in
Figure 7b and
Figure 8b.
In the third step, the threshold of the
value was further designated according to the Tukey’s fence criterion [
30] in order to eliminate the outliers. The
and
are the lower and upper quartiles of the
values, respectively, when using the selected modes with
. Because the
values should be close to 1.0, only the lower threshold
is designated as follows:
for some nonnegative constant
{\displaystyle k}. It is suggested that
should be used to indicate that these modes are “far out”. The typical results of two close modes after the third step are shown in
Figure 7c and
Figure 8c. Evidently, there were still some selected modes that were wrong, with modal frequencies far from those of the candidate modes. This is because the number of measured DOFs of the mode shape was too few given the complexity of the PTT structure. Hence, it is not easy to distinguish the modes using only the
value.
In the fourth step, the threshold of the modal frequency was designated according to the Tukey’s fence criterion again in order to eliminate the wrong modes with relatively high
values. Both the upper and lower thresholds were designated as follows:
where
and
are the lower and upper quartiles of the modal frequency, respectively, using the selected modes processed after using the threshold
in the third step. The typical results are illustrated in
Figure 7d and
Figure 8d. Obviously, only the wrong modes have been removed.
After using the above four-step procedure, ten candidate modes with identifiability larger than 60% were designated as the target modes, as listed in
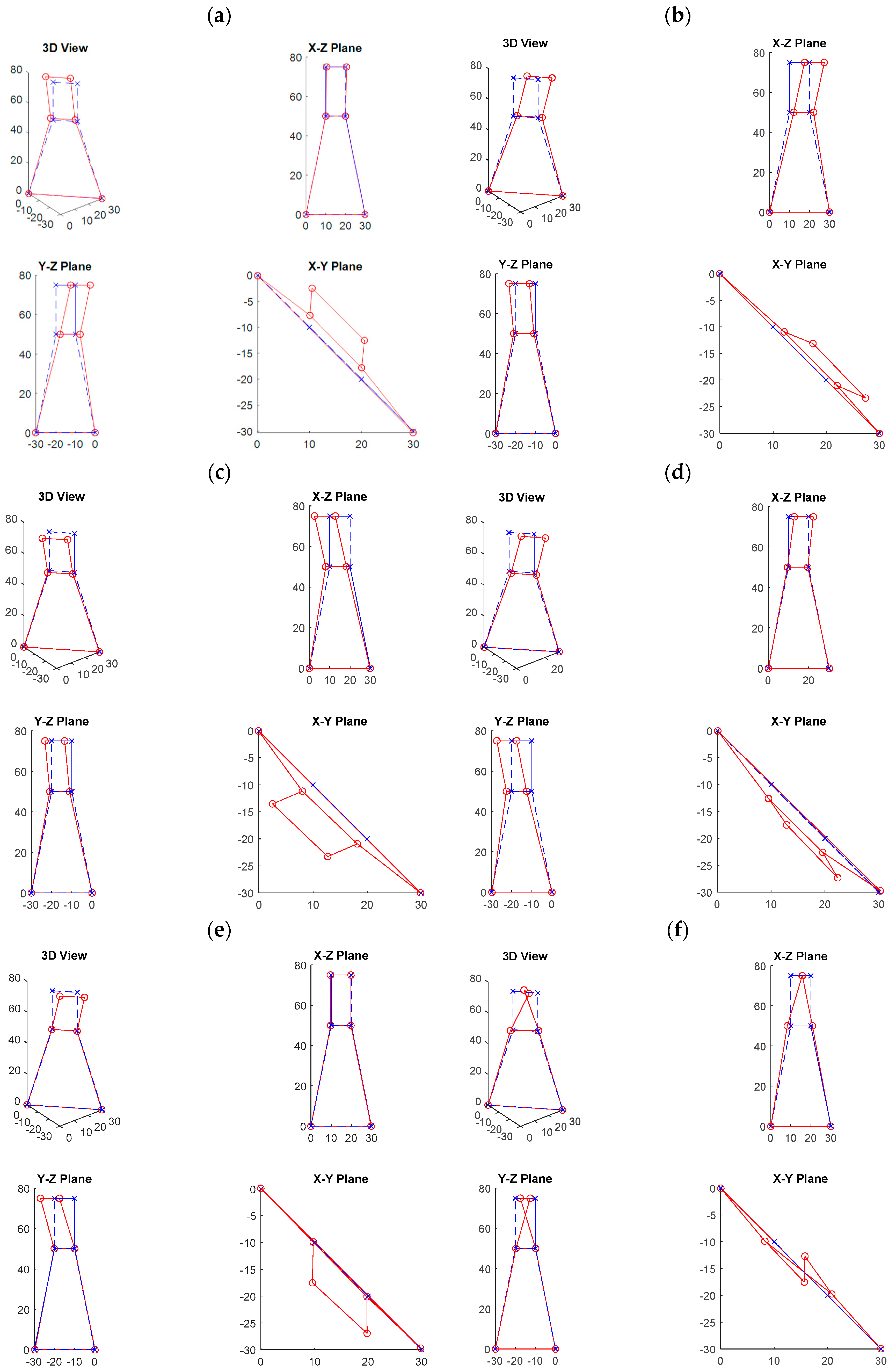
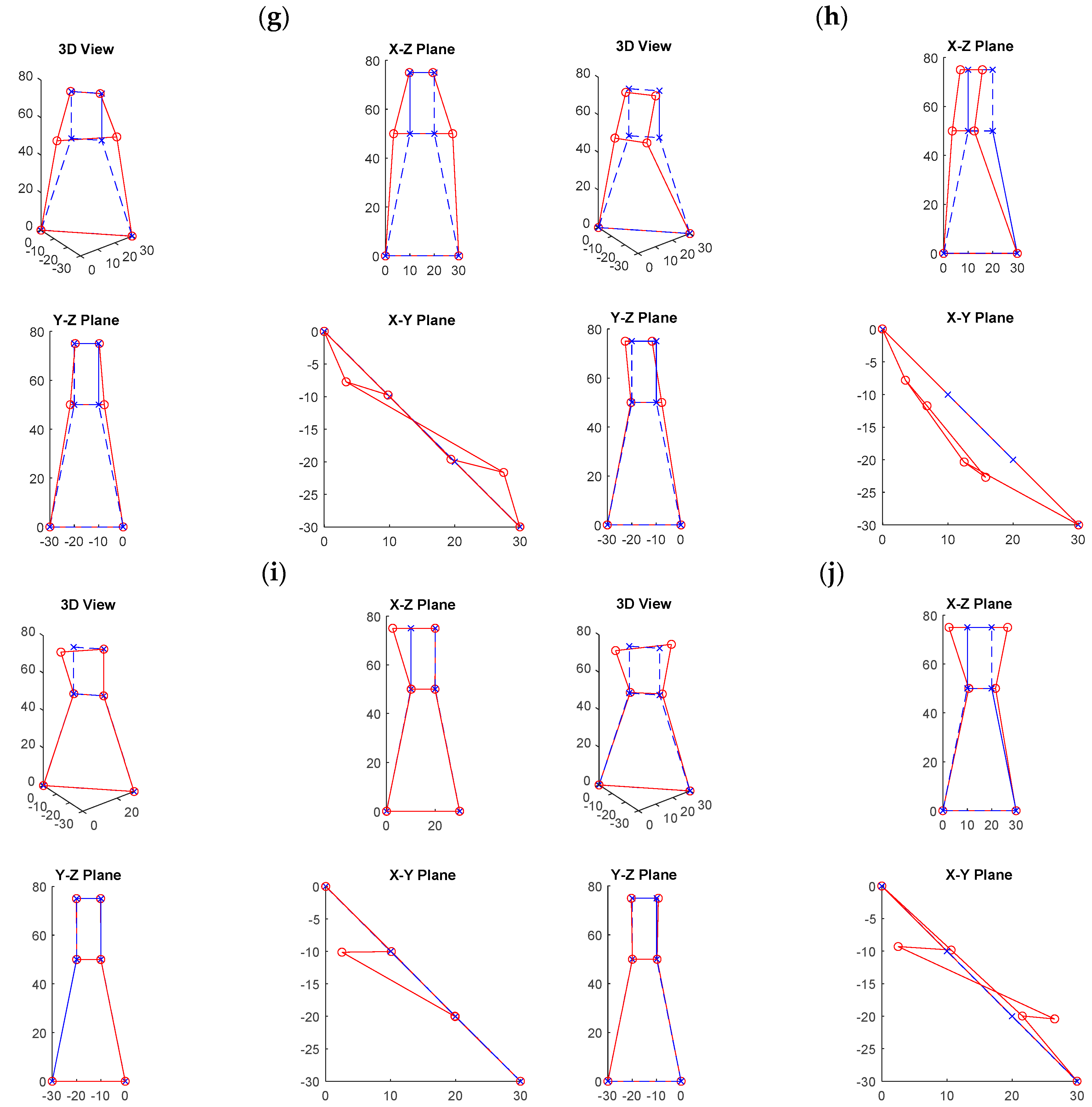
Table 1, and these modes were used to investigate the environmental and typhoon effects on the modal frequencies. The identifiability values of the first four modes were much higher, at approximately 95% and higher, while those of the six higher modes were much lower, ranging from approximately 60% to 80%. The mode shapes of these target modes are shown in
Figure 10. Because the number of measured DOFs of the mode shape was too few given the complexity of the PTT structure, it was not easy to investigate the mode shapes and draw conclusions regarding the pattern of the shapes. Nevertheless, we still separated the modes into three categories, as listed in
Table 1. The first category consisted of the modes that appeared to be “bending” along the vertical axis. These modes were modes No. 1, 2, 3, 4, 5, and 8. Three modes belonged to the “torsion” category, the second category. They were modes No. 6, 7, and 10. Only mode No. 9 seemed to behave differently, where only the amplitude of one DOF was larger. We thus concluded that this mode belonged to the “local” category.
5. Analysis of Environmental and Typhoon Effects
In this section, we describe the analysis of the long-term monitoring data of the PTT undertaken to investigate the trends in the variations of the identified target modal frequencies and better understand the effects from the environmental factors. Besides the temperature and wind speed, the acceleration response level of the PTT was also considered in this study because several previous works in the literature [
12,
20] have revealed that it may remarkably alter the modal frequencies of civil structures. Hence, the RMS value of the acceleration measurements in two directions of one of the accelerometers in the B-B section was calculated and served as an indication of the structural acceleration response level.
First of all, we performed a statistical analysis to investigate the percentage of identifiability for each identified modal frequency. Notwithstanding some periods during which vibration signal data were not collected due to technical problems, in total, there were 4793 available acceleration datasets with a length of 10 min. The percentage of identified modal frequencies
is defined as the ratio between the total number of the j-th identified target modal frequencies and the total number of measured acceleration datasets (one dataset per hour). We found that the percentage of identifiability of each identified modal frequency of each month was highly correlated to the average level of excitation. That is, the higher the average RMS acceleration value for each month, the higher the identifiability percentage was, as shown in
Figure 11. The Pearson correlation coefficient between the average percentage of all the identified modal frequencies and the average RMS acceleration value of each month was 0.95, which is quite high. This result makes sense, however, since when the amplitude of the vibration signal is small, the signal-to-noise ratio of the measured acceleration time history is low, and then the quality of the identified modal parameters is not good.
In order to observe the relationship between the target modal frequencies and the corresponding variations of the three considered environmental factors, the data for the month with the highest percentage of identified modal frequencies, i.e., December, were selected, and are shown in
Figure 12. Unfortunately, it is not easy to understand the environmental effects on the modal frequencies by referring to
Figure 12.
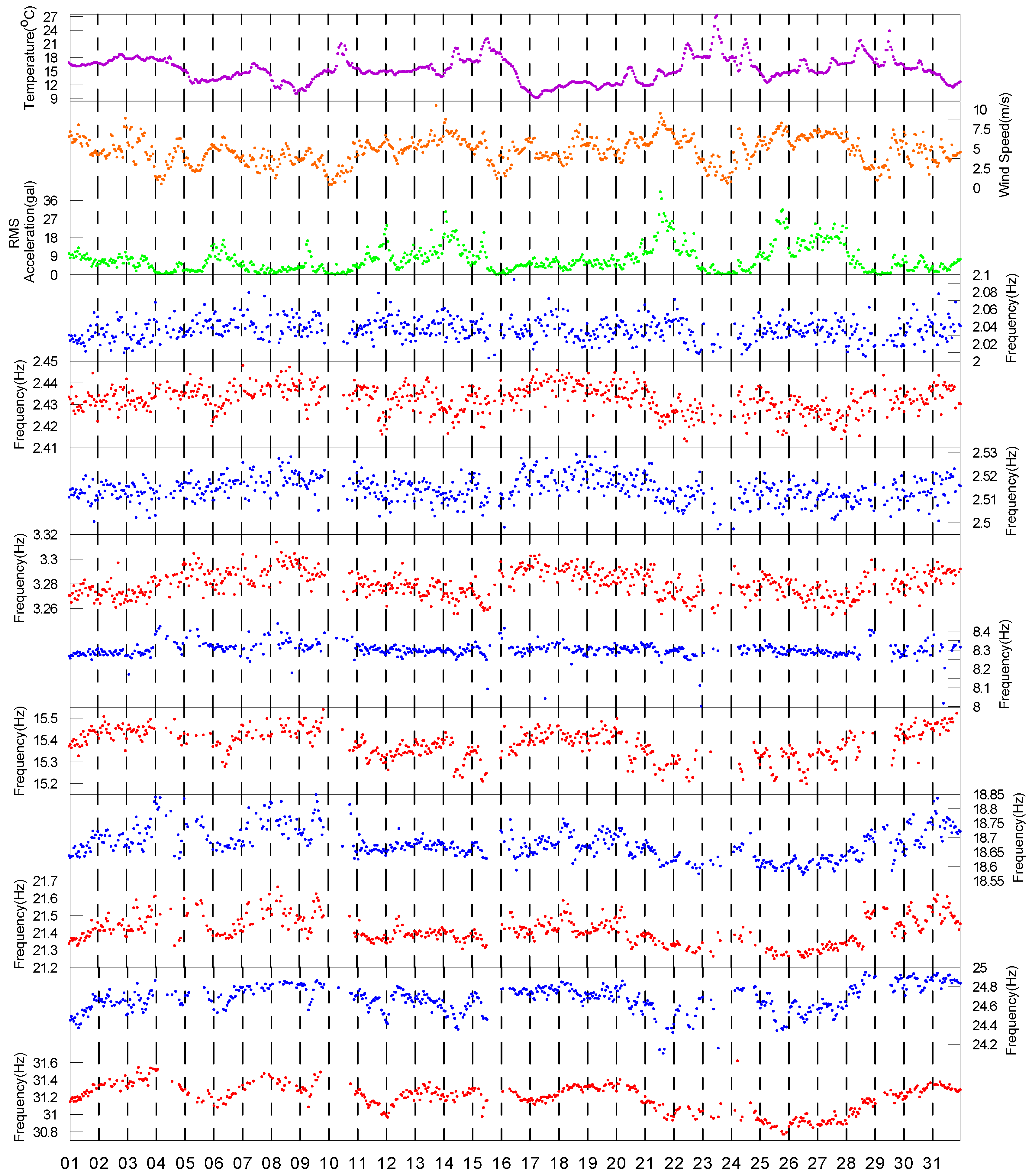
Since it is not easy to understand the environmental effects on the identified modal frequencies via the data for only one month, we stepped back to observe the data collected in 2017 over approximately ten months, as shown in
Figure 13. First, the range of variation in the modal frequencies during the whole year caused by the environmental factors was studied. The average variation range, i.e., the maximum minus the minimum values, and the variation percentage, i.e., the range of variation divided by the average value, were calculated and are listed in
Table 1. Overall, the variation range for all the modes was below 8%. The largest variation range was the range for the 9th mode, which was approximately 7.9%, while the smallest two ranges were those for the 2nd mode and the 3rd mode, which were approximately 2.2% and 2.6%, respectively. The variation range of the target modal frequencies of the TPP is thus not as high as those for bridges and buildings, for which the variation range can be approximately 10% to 20%, as shown in [
5,
12].
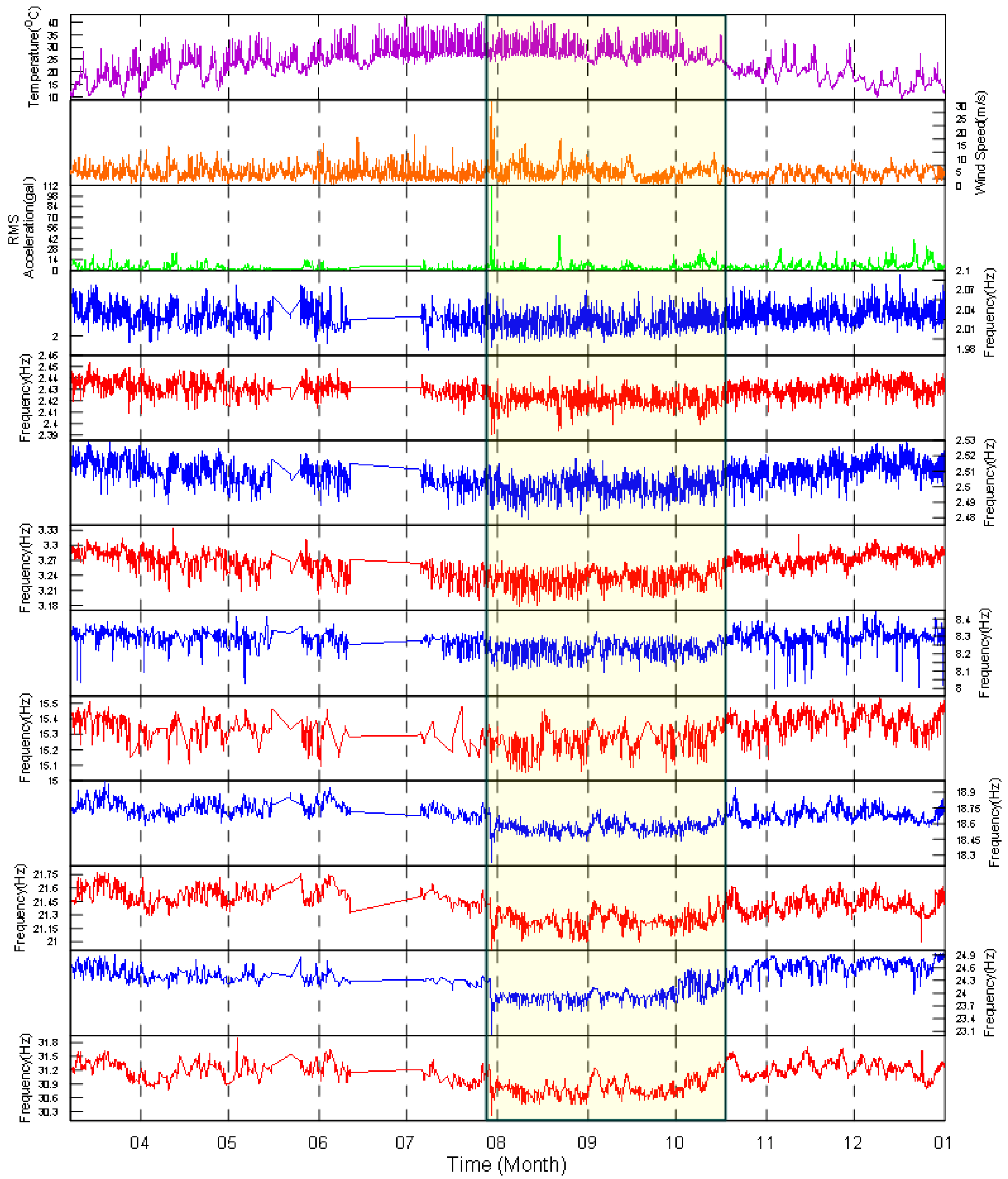
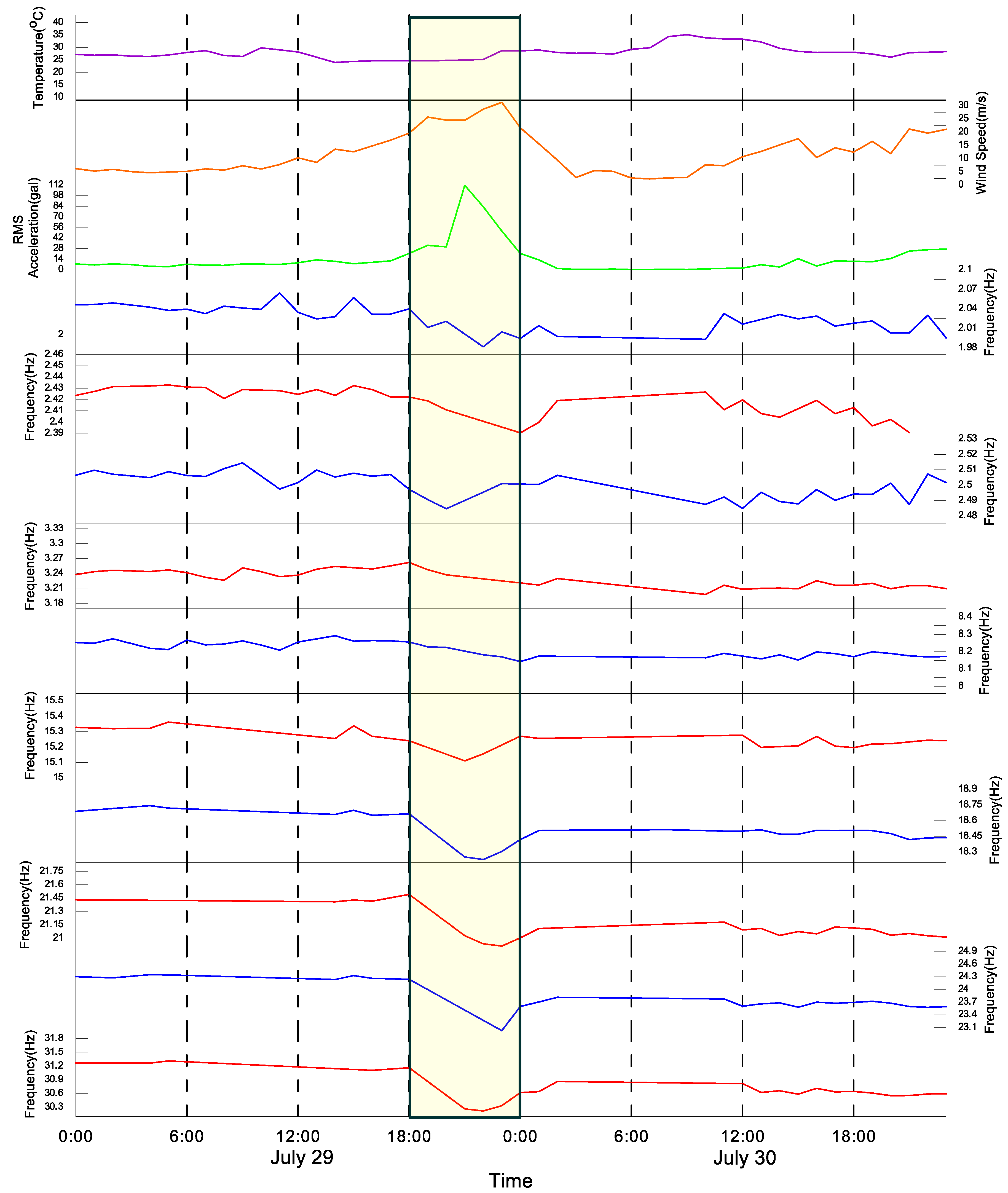
During the long-term monitoring of the PTT conducted in 2017, Typhoon Nesat, which injured 111 people and caused US
$5.83 million of agricultural losses in Taiwan, affected the PTT on July 29th. In order to observe the effect of the typhoon and other environmental factors on the modal frequencies, the close view during the typhoon period in plotted in
Figure 14. As can be observed clearly in the figure, during the hit of Typhoon Nesat, the wind speed measured on the PTT exceeded the 17.2 m/s (the minimum wind speed to be classified as a typhoon) for seven hours. The maximum wind speed was approximately 32 m/s, which induced the maximum RMS acceleration value of 1.11 m/s
2 at 21:00 UTC+8. No visual damage was observable either on the PTT or the cables after the Typhoon Nesat event. The power transmitting system kept in normal operation condition without any interference due to this typhoon event. No abnormal behaviour was observed after examining the measured environmental and acceleration signals during the typhoon event. However, it was found that the modal frequencies of some of the higher modes, i.e., the 7th mode to the 10th mode, dropped substantially then, after which their frequencies remained lower until the middle of October when the temperature started to cool down. However, this phenomenon could not be clearly observed for the rest of the modes, especially the lower modes.
In order to understand the effects on the modal frequencies caused by the typhoon event and the long-term environmental variation, we divided the data collected in 2017 into three phases, as marked in
Figure 13. The first phase, which started on March 8th and ended at 20:00 on 29 July, served as the phase of data before the Typhoon Nesat event; the second phase, which started at 21:00 on 29 July and ended on 14 October, served as the phase of data after the Typhoon Nesat event; and the third phase, which started on 15 October and ended on 31 December, served as the phase of data for the recovery from the Typhoon Nesat event.
Firstly, we calculated the Pearson correlation coefficients between the three environmental factors and the modal frequencies during the first phase, as shown in
Table 2. In general, compared to the other two factors, the temperature affected the modal frequencies to a greater extent, with the exception of the 7th mode and the 8th mode where the RMS acceleration values had the highest correlation coefficients. Among all the temperature correlation coefficients, the two modes with the highest correlation coefficients were the 4th mode and the 3rd mode, and their correlation coefficients were −0.90 and −0.77, respectively. For the wind speed, all the correlation coefficients were negative, and their values were between −0.08 and −0.40, which are not high. As for the RMS acceleration, the correlation coefficients were between −0.41 and 0.34. Note that for the first five modes, the RMS acceleration correlation coefficients were positive, and for the remaining higher modes, the RMS acceleration correlation coefficients were negative. It seems that the modal frequencies also slightly decreased with the increases in RMS acceleration values, but only for the higher modes.
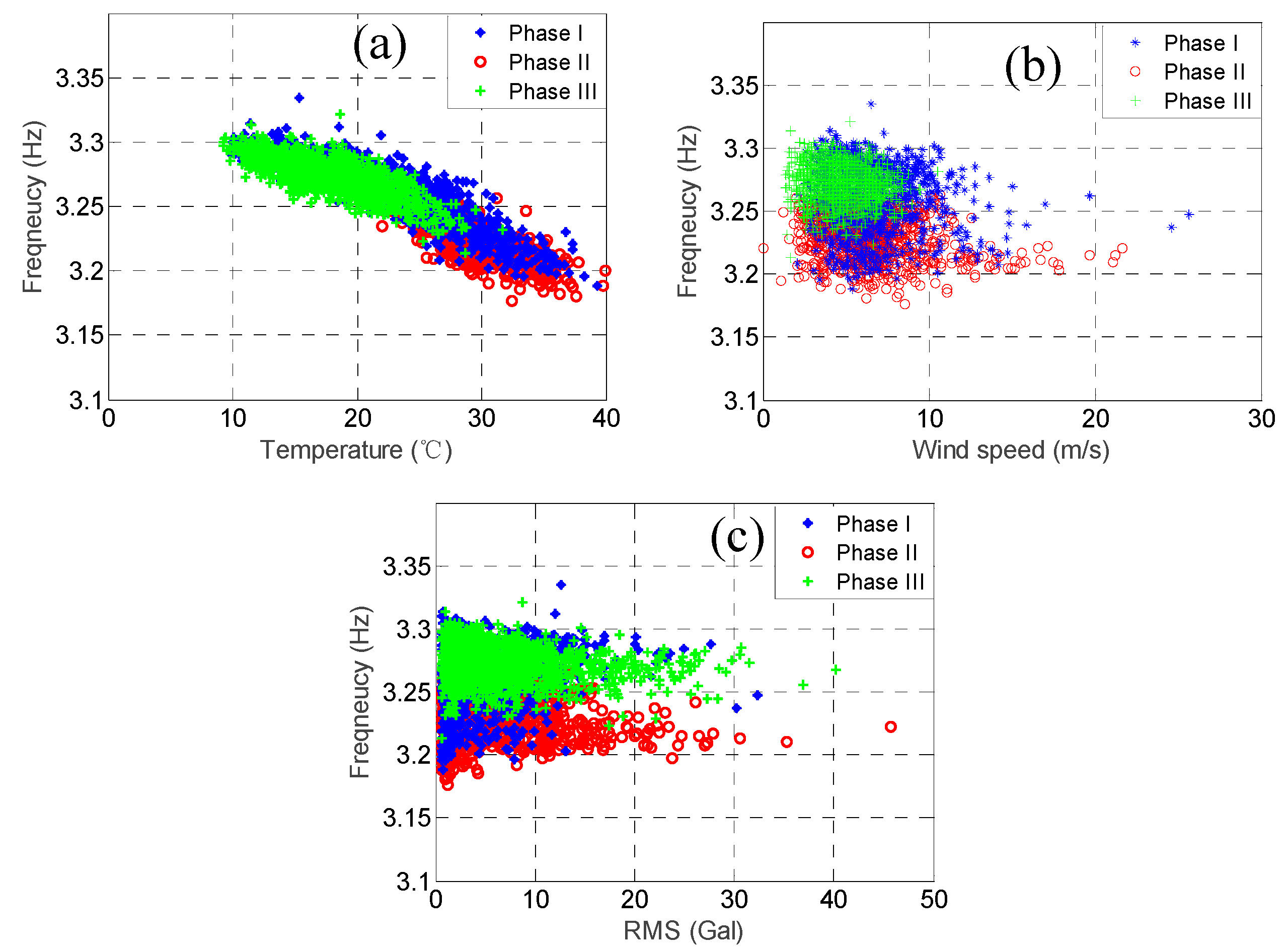
As mentioned previously, the modal frequencies of some of the higher modes but not the lower modes dropped substantially because of Typhoon Nesat. In order to observe this phenomenon more clearly, we plotted the relationship between the three environmental factors and the modal frequencies for the two modes with the highest correlation coefficients of temperature, i.e., the 3rd mode and the 4th mode, and the two modes with the lowest correlation coefficients of temperature, i.e., the 7th mode and the 8th mode, as shown in
Figure 15,
Figure 16,
Figure 17 and
Figure 18. In each figure, the data within the different phases are marked using different shapes and colours.
Let us focus on the 3rd mode and the 4th mode first.
Figure 15 and
Figure 16 show the temperature, RMS acceleration, and wind speed effects on these two modes. The effects exerted on these two modes were evidently dominated by the temperature because their correlation coefficients were much higher than those for the other two environmental factors. It can be observed in
Figure 15a and
Figure 16a that the temperature effects were quite linear, and the slopes also declined for all the three phases. Note that the temperature ranges of the three phases were quite different. The temperature range of the first phase was relatively wide, ranging from 9.8 °C to 37.2 °C, with the average equal to 23.6 °C. The temperature of the second phase was relatively high, ranging from 21.8 °C to 37.6 °C, with the average equal to 28.4 °C. The temperature of the third phase was relatively low, ranging from 8.9 °C to 31.9 °C, with the average equal to 18.5 °C. In contrast,
Figure 15b and
Figure 16b show that the wind speed effects were quite ambiguous, consistent with the low wind speed correlation coefficients, i.e., only −0.03 and −0.16, respectively. Although the ranges of the wind speed values during these three phases were not the same, most of their values fell below 10 m/s. Therefore, because the effects exerted on these modal frequencies were dominated by temperature, and the temperature ranges of the three phases were different, the distributions of these three phases in
Figure 15b and
Figure 16b are also different. For instance, the modal frequencies during the second phase were smaller than the ones during the other two phases because the temperature was relatively high during that phase. As for the RMS acceleration,
Figure 15c and
Figure 16c show that the effects were also quite small, which again was consistent with the low RMS acceleration correlation coefficients, i.e., only 0.00 and 0.28, respectively. Although their effects were somewhat linear, the slopes were very small. Note that for all three phases, the distributions of the RMS acceleration values were quite similar. Again, due to the dominant temperature effects and the distinct temperature patterns of these three phases, the distributions of these three phases in
Figure 15c and
Figure 16c are also different. Similar conclusions can be drawn observing the remaining four lower modes.
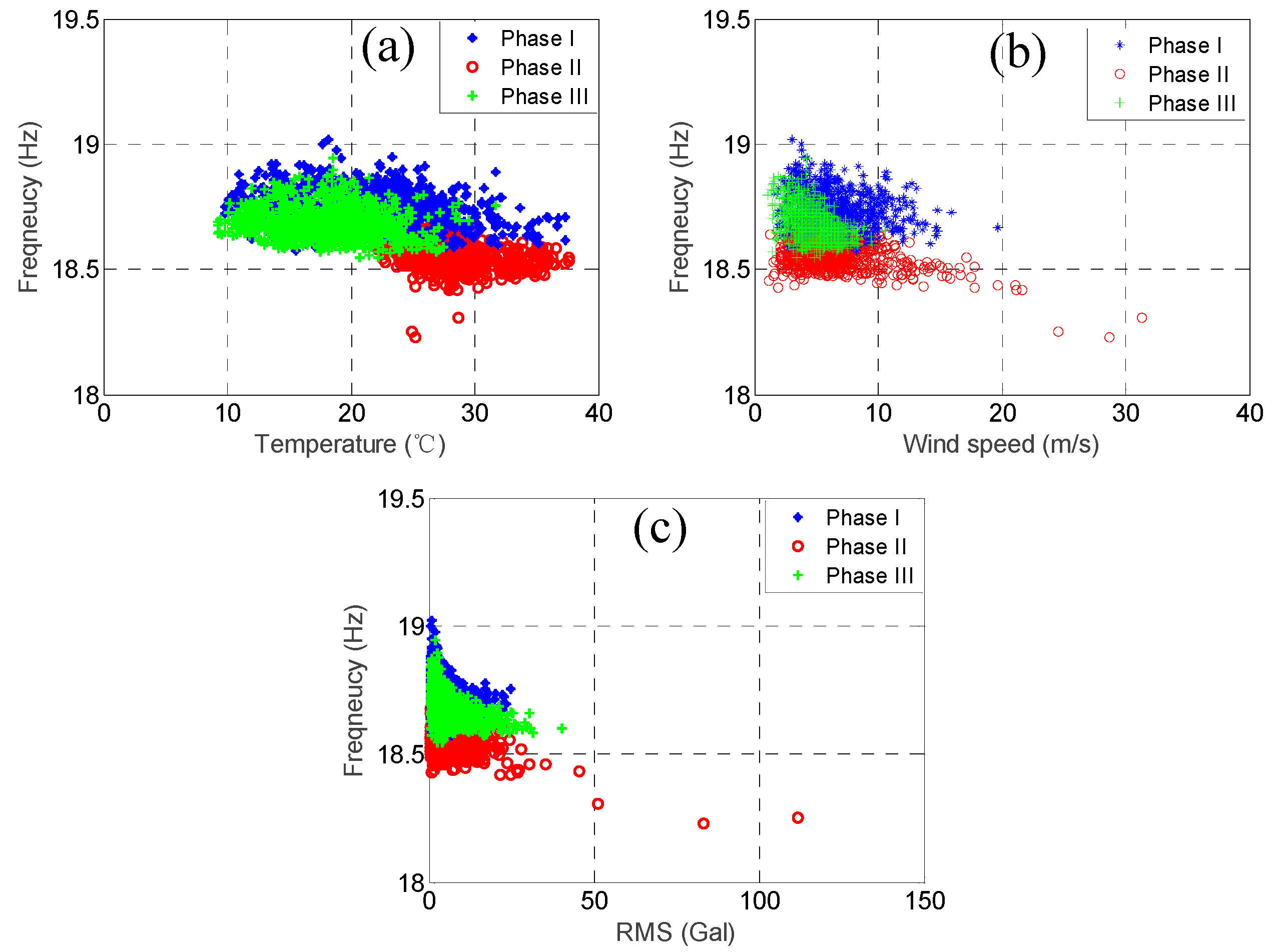
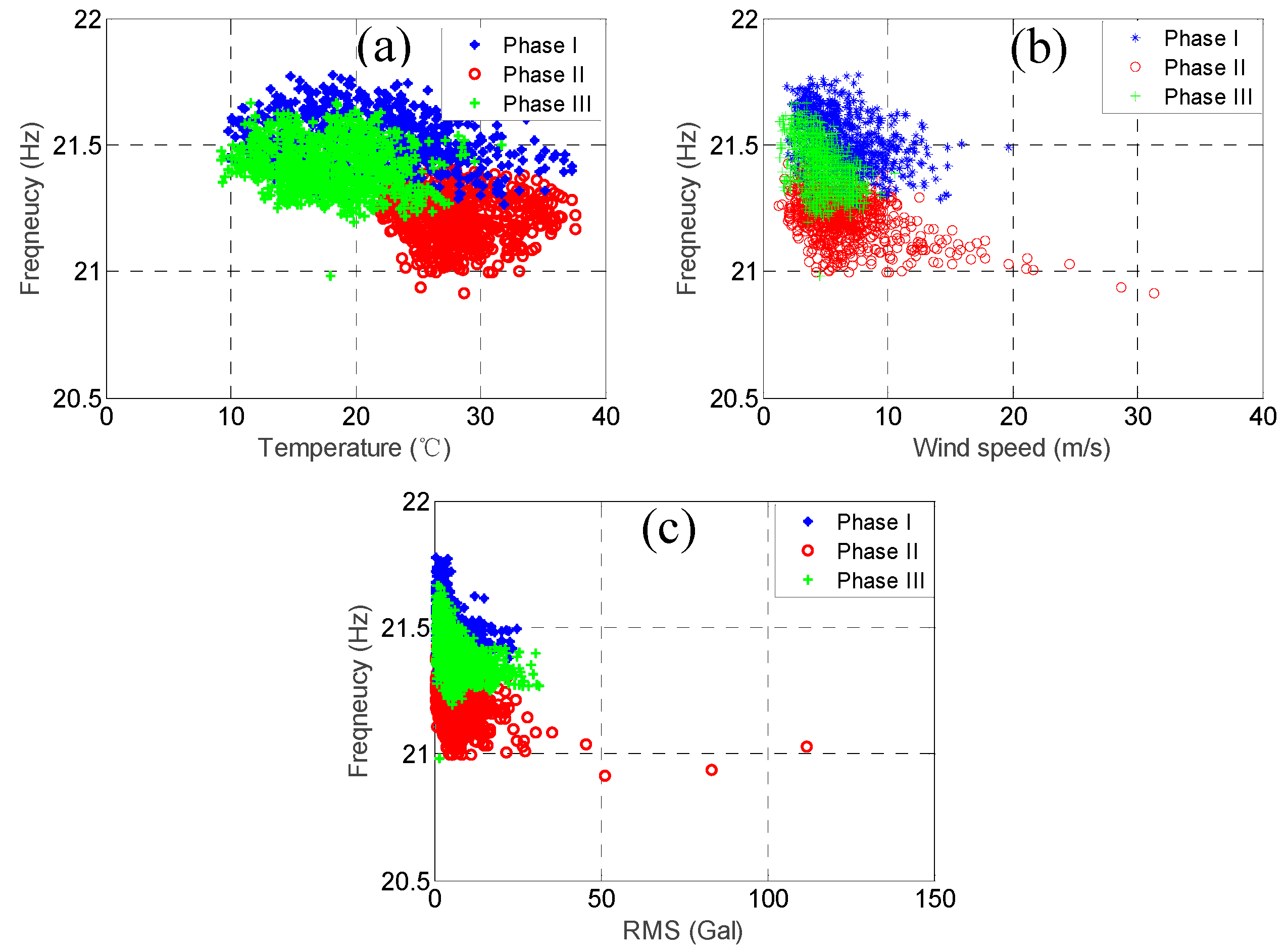
Let us focus on the 7th mode and the 8th mode now.
Figure 17 and
Figure 18 show the temperature, RMS acceleration, and wind speed effects on these two modes. Unlike the 3rd mode and the 4th mode, the effects exerted on these two modes were not dominated by any of the three environmental factors, but the effects of the RMS acceleration and wind speed were higher than those of the temperature.
Figure 17c and
Figure 18c show that the modal frequencies decreased when the RMS acceleration increased, and the relationship was not simply linear, but somewhat convex. These two figures correspond to the RMS acceleration correlation coefficients of these two modes, which are −0.35 and −0.41, respectively, quite well. Since the ranges of the RMS acceleration values during these three phases were quite similar, and the RMS acceleration correlation coefficients were the highest among the three environmental factors, the patterns of the data during these three phases should be quite similar. However, their patterns were evidently different. In general, the modal frequencies during the first phase were the highest, followed by the ones during the third phase, while the ones during the second phase were the lowest. This phenomenon implies that there should have been other effects that caused such remarkable variation in the modal frequencies. Similarly,
Figure 17b and
Figure 18b show that the modal frequencies were also decreased when the wind speed was increased, but the relationship was not as convex as that for the RMS acceleration. These two figures also correspond to the wind speed correlation coefficients of these two modes, which are −0.25 and −0.35, respectively, quite well. Knowing that the RMS acceleration values during these three phases were quite similar, and that most of the wind speed values of the three phases were below 10 m/s, it can be concluded that the patterns of data during these three phases should be quite similar if we already know that the modal frequencies of the two modes were mainly affected by the RMS acceleration and wind speed but not the temperature. However, their patterns were evidently different, and the trends were similar to the ones shown in
Figure 17c and
Figure 18c. Again, this phenomenon implies that there should have been other effects that caused such remarkable variation in the modal frequencies. As for the temperature,
Figure 17a and
Figure 18a show that the modal frequencies were also decreased when the temperature was increased, but the relationships were quite linear and the slopes were not so inclined. The temperature correlation coefficients of these two modes were only −0.17 and −0.14, respectively. However, as already mentioned previously, while the temperature range of the three phases were quite different, since their temperature effects were not large, the remarkable variation in the modal frequencies should not be attributed to the temperature variation. As a result, the remarkable variation in the modal frequencies cannot have been due to any of the three environmental effects. Hence, it is very possible that they were due to the Typhoon Nesat event. Similar conclusions can be drawn observing the remaining two higher modes.
Note that for these two typical higher modes, during these three phases, the RMS acceleration and wind speed were generally under similar conditions, and the temperature effects were not large. Therefore, the change in the variation percentage intercepts of the linear equations of the three phases was considered to have been affected by the Typhoon Nesat event and also the recovery mechanism due to the seasonal temperature change. As shown in
Figure 3, unlike other civil engineering structures whose dominant vibration signal is mainly contributed by the lower modes, the dominant vibration signal of the PTT is mainly contributed by the vibration frequencies close to 25 Hz. This finding supports the argument that it was more likely that the modal frequencies of the higher modes were altered by the Typhoon Nesat event.
Because among the three environmental factors, the relationship between the temperature and the modal frequency was the most linear and simplest, a simple first-degree polynomial equation was used to fit the data of the three different phases individually using the least squares method. The change in the intercept of the linear equations for each modal frequency was calculated using the first phase as a reference, with the results listed in
Table 3. It can be observed that for the second phase, the variation percentage of the first six modal frequencies was relatively small, approximately between −0.07% and −0.46%, while the variation percentage of the remaining four higher modes was relatively large, approximately between −0.89% and −1.34%. For the third phase, the values of the variation percentage of all the modes were increased. For the six lowest modes, the variation percentage was between −0.19% and 0.26%, while for the four highest modes, the variation percentage was between −0.45% and 0.68%. The largest change in the variation percentage from the second phase to the third phase was in the 9th mode, for which it was increased from −1.34% to 0.68%, a difference of approximately 2%.
6. Conclusions and Discussion
In this study, the acceleration time history, temperature, and wind speed recorded every hour by the long-term monitoring system of a PTT were analysed. The automated SSI technique was employed to identify the candidate modes of the PTT using the acceleration time history of each dataset recorded every hour. These candidate modes were traced using a proposed procedure with four steps, and the ones with relatively high identifiability were selected as the target modes to be investigated for their environmental effects. Not only the lower modes, but also the higher modes were selected. Note that because the PTT is a very complex truss structure, it is not easy to interpret the identified modes using only a few DOFs of acceleration measurement in this study. Nevertheless, the modes with different frequencies and mode shapes were identified successfully using such small number of accelerometers.
The ten months of monitoring data were adopted to examine the variation trends of the ten target modal frequencies and assess the effects of the temperature, vibration intensity, and wind speed. In general, when the vibration intensity was larger, the identifiability of the modal frequencies for that month was also larger. The variation range of all the target modes was not very large, only between 2% and 8%. For all the target modes, the modal frequencies decreased as the temperature increased, with a nearly linear relationship. However, the correlation coefficients were somewhat diverse, ranging from −0.14 to −0.90. As for the wind speed, all the modal frequencies of the target modes decreased as the wind speed increased, but with smaller amplitudes of correlation coefficients, which ranged from −0.03 to −0.40. As for the RMS acceleration, for the five lower target modes, their correlation coefficients were positive, ranging from 0.00 to 0.34, whereas for the five higher target modes, their correlation coefficients were negative, ranging from −0.16 to −0.41. The relationships between the modal frequencies and both the RMS acceleration and wind speed were somewhat convex, but not clear.
During the whole monitoring period of 2017, the Typhoon Nesat event affected the PTT on 29 July, and seems to have temporarily affected the values of the modal frequencies, especially those for the higher target modes. This temporary effect of the typhoon event seems to have been recovered from when the temperature started to cool down beginning around 14 October. Accordingly, the long-term monitoring period was divided into three phases to be investigated for the typhoon and environmental effects. After deliberately examining the modal frequencies of these three phases together with the environmental factors of the three phases, it was observed that the modal frequencies dropped substantially after the typhoon event, especially for the higher modes, except the 5th mode, whose modal frequencies dropped by approximately −0.9% to −1.35%. As for the remaining lower modes, although their modal frequencies also dropped after the typhoon event, the amplitudes of these drops were observed to be approximately only −0.14% to −0.35%. It is possible that the sudden drop of natural frequencies is due to the significant amount of precipitation that usually occurs during typhoon events. Precipitation in the form of rain adds to the inertia of the structure, and in addition, it also affects the soil where the structure’s foundation is placed. Increased inertia and softened, moist soil could be the factors causing a reduction in the natural frequencies. Unfortunately, the instrumentation of the PTT did not include a precipitation sensor and the humidity sensor, so it will not be possible to check if these factors have a significant correlation with natural frequencies. Nevertheless, it remains unclear why only the higher modes were affected significantly, hence further studies are required to understand this phenomenon.
In this study, environmental and typhoon effects on a PTT were explored and quantified. The next step would be to eliminate those interferences from the variations of the target modal frequencies as much as possible. It can be imagined that such work would face challenges because of the diverse phenomena associated with the effects of temperature, RMS acceleration, wind speed, and typhoon events. Nonetheless, it is hoped that in the near future, a damage detection approach using the measured modal frequencies will be applied successfully based on the results in the current study.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}