An Ultrasonic Object Detection Applying the ID Based on Spread Spectrum Technique for a Vehicle †



Abstract
:1. Introduction
2. Related Work
3. System Description
3.1. Modulation
3.2. Multiple Access Scheme
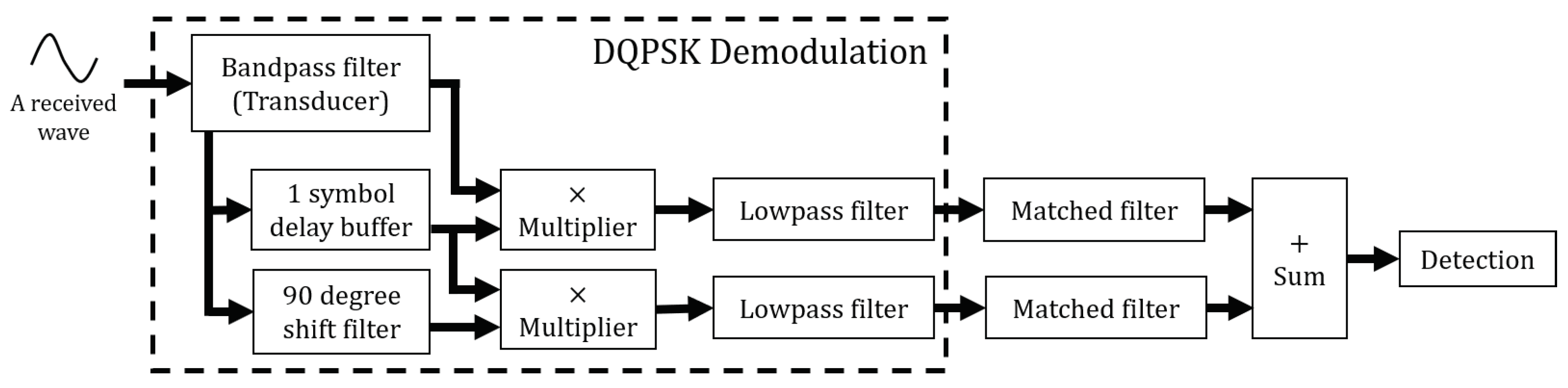
3.3. Detection Process
3.4. Interference from the Other Transducer
4. Ranging Implementation
- The MCU calls the stored code to generate the modulated signal as shown in Figure 8.
- The signal is amplified through the analog circuit and transmitted from transducer.
- The transducer receives a reflected wave and ADC chip conducts sampling.
- The zero-crossing detector converts each sample to 1 or –1.
- Signal sampled at a previous step is demodulated.
- The demodulated signal is filtered by a matched filter.
- Correlation which is the output of the matched filter shows an arrival time of the ID sequence.
- Distance from an obstacle is calculated using the arrival time.
- If an error of the calculated distance is less than 10 cm, the ID is detected correctly.
4.1. Simulation
4.2. Measurement on the Ultrasonic Modem
5. Conclusions
6. Future Work
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Mammeri, A.; Zuo, T.; Boukerche, A. Extending the Detection Range of Vision-Based Vehicular Instrumentation. IEEE Trans. Instrum. Meas. 2016, 65, 856–873. [Google Scholar] [CrossRef]
- Paris, C.; Bruzzone, L. A Three-Dimensional Model-Based Approach to the Estimation of the Tree Top Height by Fusing Low-Density LiDAR Data and Very High Resolution Optical Images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 467–480. [Google Scholar] [CrossRef]
- Totzke, I.; Jessberger, S.; Mühlbacher, D.; Krüger, H. Semi-autonomous advanced parking assistants: Do they really have to be learned if steering is automated? IET Intell. Transp. Syst. 2011, 5, 141–147. [Google Scholar] [CrossRef] [Green Version]
- Yi, D.; Joo, J.; Kim, S.C. Implementation of DPSK-based Obstacle Detection System using UItrasound for Vehicles. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 614–616. [Google Scholar]
- Yi, D.; Joo, J.; Piao, Z.; Jin, H.; Kim, S.C. Ultrasound-based Obstacle Detection System for Vehicles under Interference Environment. In Proceedings of the 2019 Asia-Pacific Conference on Communications (APCC), Ho Chi Minh City, Vietnam, 6–8 November 2019; pp. 95–98. [Google Scholar]
- Sumague, K.A.; Savage, H.; Curtis, K.; Stram, A. Ultrasonic Range Detection; Microchip Technology Inc.: Chandler, AZ, USA, 2013. [Google Scholar]
- Jackson, J.C.; Summan, R.; Dobie, G.I.; Whiteley, S.M.; Pierce, S.G.; Hayward, G. Time-of-flight measurement techniques for airborne ultrasonic ranging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 343–355. [Google Scholar] [CrossRef] [PubMed]
- Khyam, M.O.; Ge, S.S.; Li, X.; Pickering, M.R. Highly Accurate Time-of-Flight Measurement Technique Based on Phase-Correlation for Ultrasonic Ranging. IEEE Sens. J. 2017, 17, 434–443. [Google Scholar] [CrossRef]
- Ens, A.; Reindl, L.M. Multicarrier airborne ultrasound transmission with piezoelectric transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 905–914. [Google Scholar] [CrossRef]
- Shin, S.; Kim, M.; Choi, S.B. Improving efficiency of ultrasonic distance sensors using pulse interval modulation. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Schlegl, T.; Bretterklieber, T.; Neumayer, M.; Zangl, H. Combined Capacitive and Ultrasonic Distance Measurement for Automotive Applications. IEEE Sens. J. 2011, 11, 2636–2642. [Google Scholar] [CrossRef]
- Segers, L.; Tiete, J.; Braeken, A.; Touhafi, A. Ultrasonic Multiple-Access Ranging System Using Spread Spectrum and MEMS Technology for Indoor Localization. Sensors 2014, 14, 3172–3187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Segers, L.; Van Bavegem, D.; De Winne, S.; Braeken, A.; Touhafi, A.; Steenhaut, K. An Ultrasonic Multiple-Access Ranging Core Based on Frequency Shift Keying Towards Indoor Localization. Sensors 2015, 15, 18641–18665. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khyam, M.O.; Noor-A-Rahim, M.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Ashhar, K.; Noor-A-Rahim, M.; Khyam, M.O.; Soh, C.B. A Narrowband Ultrasonic Ranging Method for Multiple Moving Sensor Nodes. IEEE Sens. J. 2019, 19, 6289–6297. [Google Scholar] [CrossRef]
- Li, C.; Hutchins, D.A.; Green, R.J. Short-range ultrasonic communications in air using quadrature modulation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2009, 56, 2060–2072. [Google Scholar] [PubMed] [Green Version]
- Miller, L.E.; Lee, J.S. BER expressions for differentially detected π/4 DQPSK modulation. IEEE Trans. Commun. 1998, 46, 71–81. [Google Scholar] [CrossRef]
- Roy, A.; Nemade, H.B.; Bhattacharjee, R.; Kushwah, V. DQPSK modulation and demodulation using SAW device. IET Commun. 2017, 11, 2630–2636. [Google Scholar] [CrossRef]
- Aly, O.A.M.; Omar, A.S. Spread spectrum ultrasonic positioning system. In Proceedings of the 2nd Workshop on Positioning, Navigation and Communication (WPNC05), Magdeburg, Germany, 17 March 2005; pp. 109–114. [Google Scholar]
- Sarwate, S.V.; Pursley, M.B. Crosscorrelation properties of pseudorandom and related sequences. Proc. IEEE 1980, 68, 593–619. [Google Scholar] [CrossRef]
- Barker, R.H. Group Synchronizing of Binary Digital Sequences. In Communication Theory; Butterworth: London, UK, 1953; pp. 273–287. [Google Scholar]
- Alloulah, M.; Hazas, M. An efficient CDMA core for indoor acoustic position sensing. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zürich, Switzerland, 15–17 September 2010; pp. 15–17. [Google Scholar]
- Vemuri, A.T. Using a fixed threshold in ultrasonic distance-ranging automotive applications. Analog. Appl. J. 2012, 3Q, 19–23. [Google Scholar]
- Hassa, E.S. Adaptive threshold to guarantee both detection and false alarm probabilities in multi-taper based spectrum sensing. J. Frankl. Inst. 2019, 356, 1640–1657. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Temperature | 20 °C |
| Atmospheric pressure | 101.325 kPa |
| Relative humidity | 40% |
| Attenuation coefficient | 1.46017 dB/m |
| Reflection coefficient | 1 |
| Signal-to-noise ratio | –3, 0, 3 dB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, D.; Jin, H.; Kim, M.C.; Kim, S.C. An Ultrasonic Object Detection Applying the ID Based on Spread Spectrum Technique for a Vehicle. Sensors 2020, 20, 414. https://doi.org/10.3390/s20020414
Yi D, Jin H, Kim MC, Kim SC. An Ultrasonic Object Detection Applying the ID Based on Spread Spectrum Technique for a Vehicle. Sensors. 2020; 20(2):414. https://doi.org/10.3390/s20020414
Chicago/Turabian StyleYi, Donghee, Heetae Jin, Moon Chan Kim, and Suk Chan Kim. 2020. "An Ultrasonic Object Detection Applying the ID Based on Spread Spectrum Technique for a Vehicle" Sensors 20, no. 2: 414. https://doi.org/10.3390/s20020414
APA StyleYi, D., Jin, H., Kim, M. C., & Kim, S. C. (2020). An Ultrasonic Object Detection Applying the ID Based on Spread Spectrum Technique for a Vehicle. Sensors, 20(2), 414. https://doi.org/10.3390/s20020414