Dynamic Model and Inverse Kinematic Identification of a 3-DOF Manipulator Using RLSPSO



Abstract
:1. Introduction
Contributions
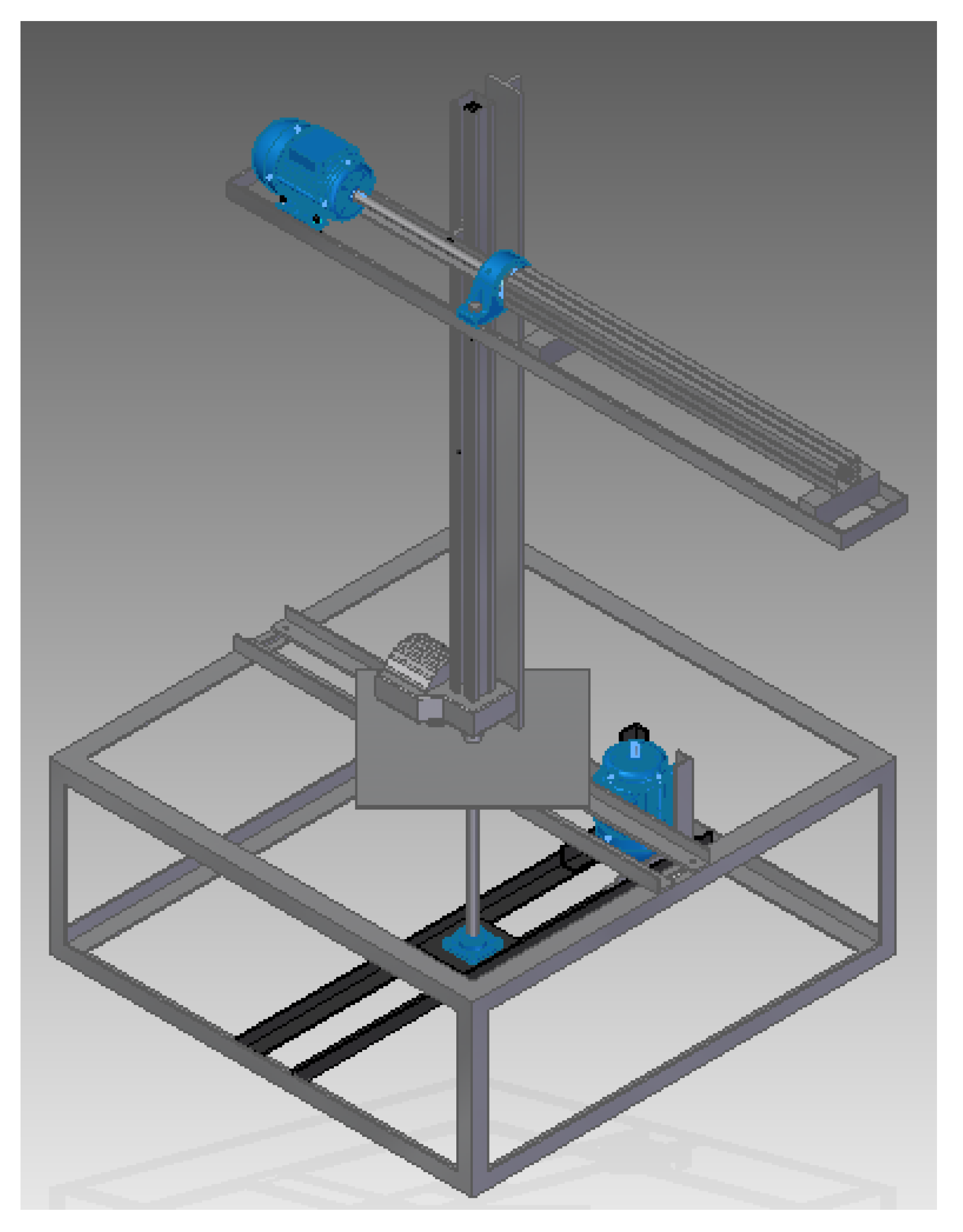
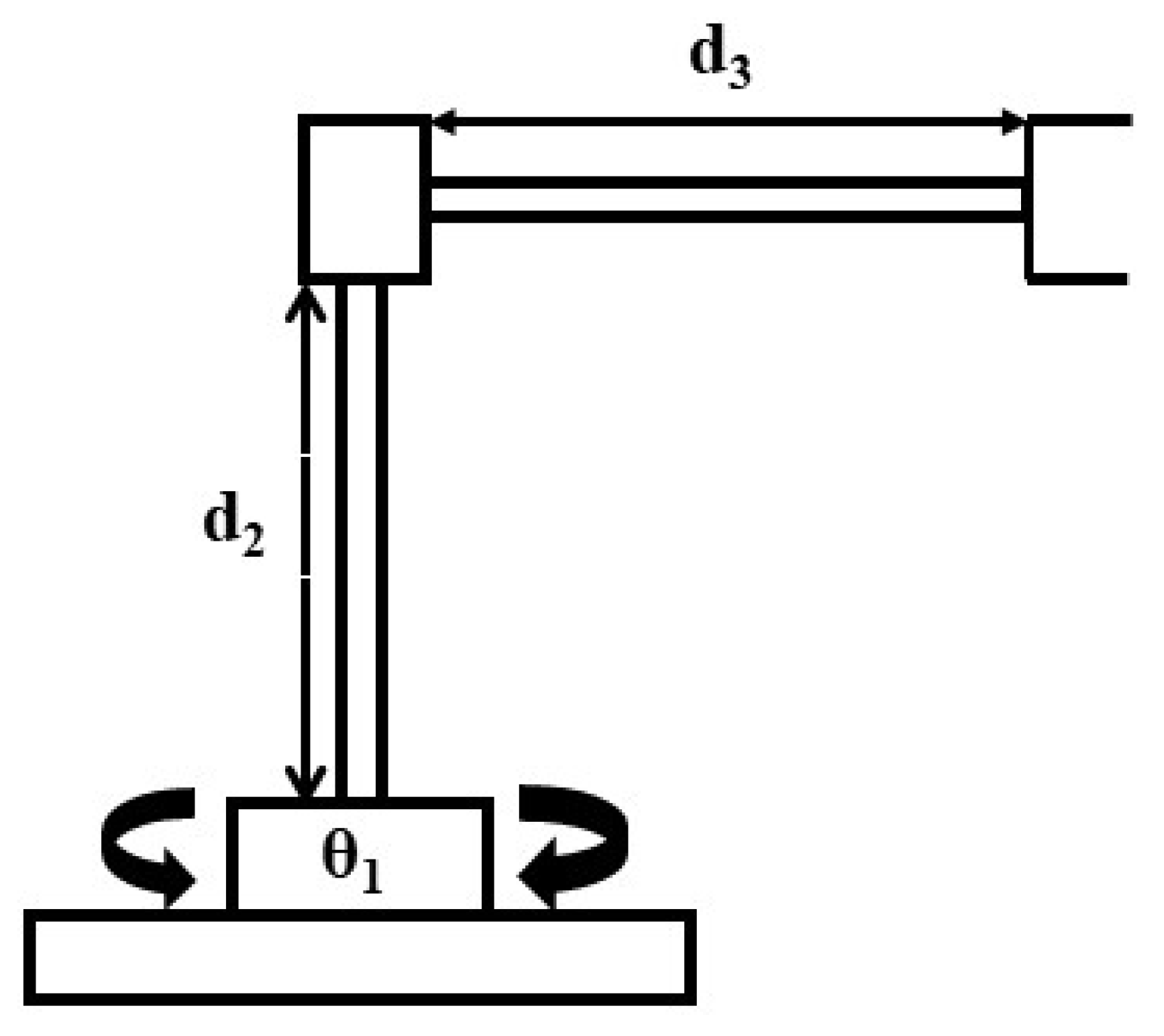
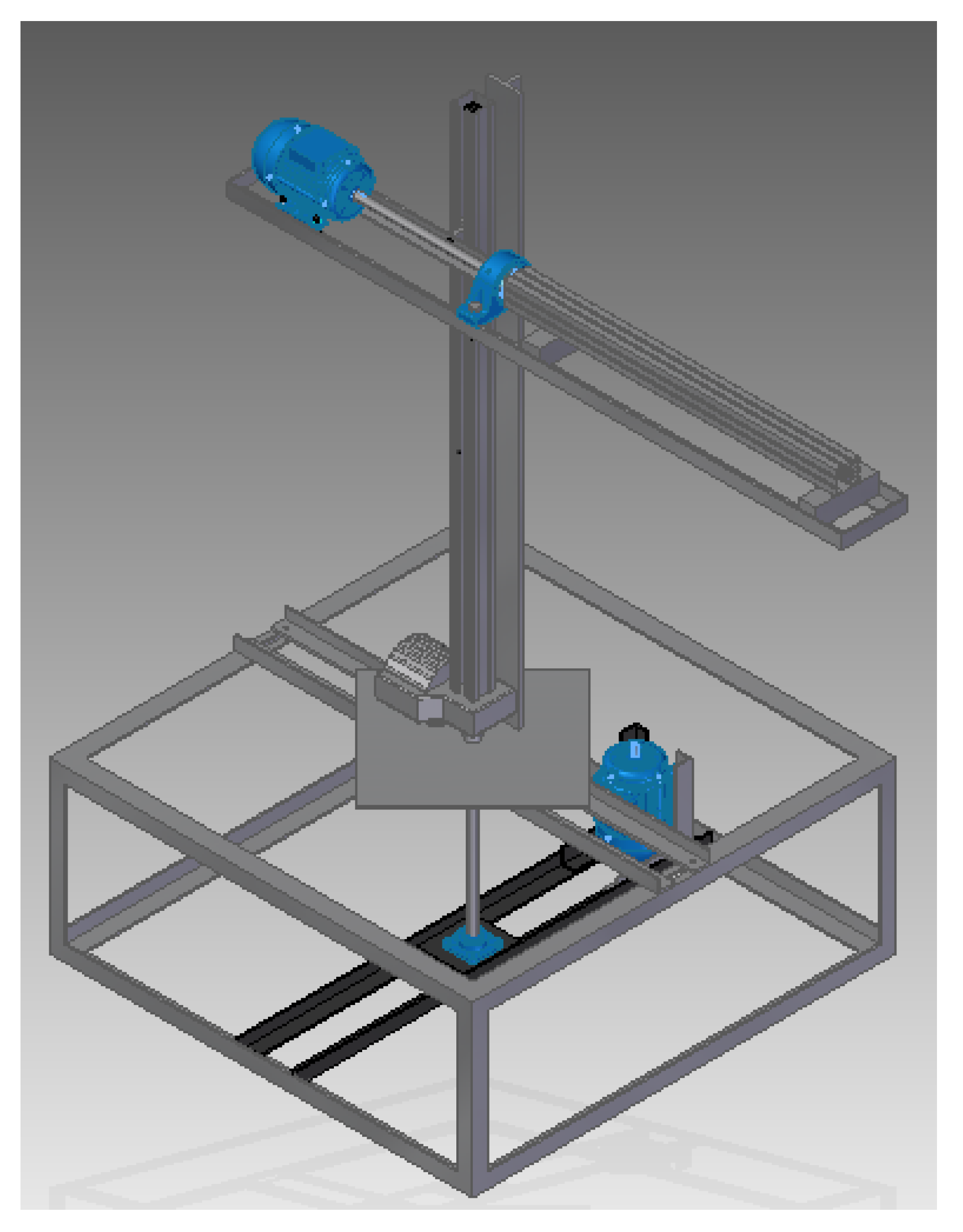
2. Cylindrical Manipulator
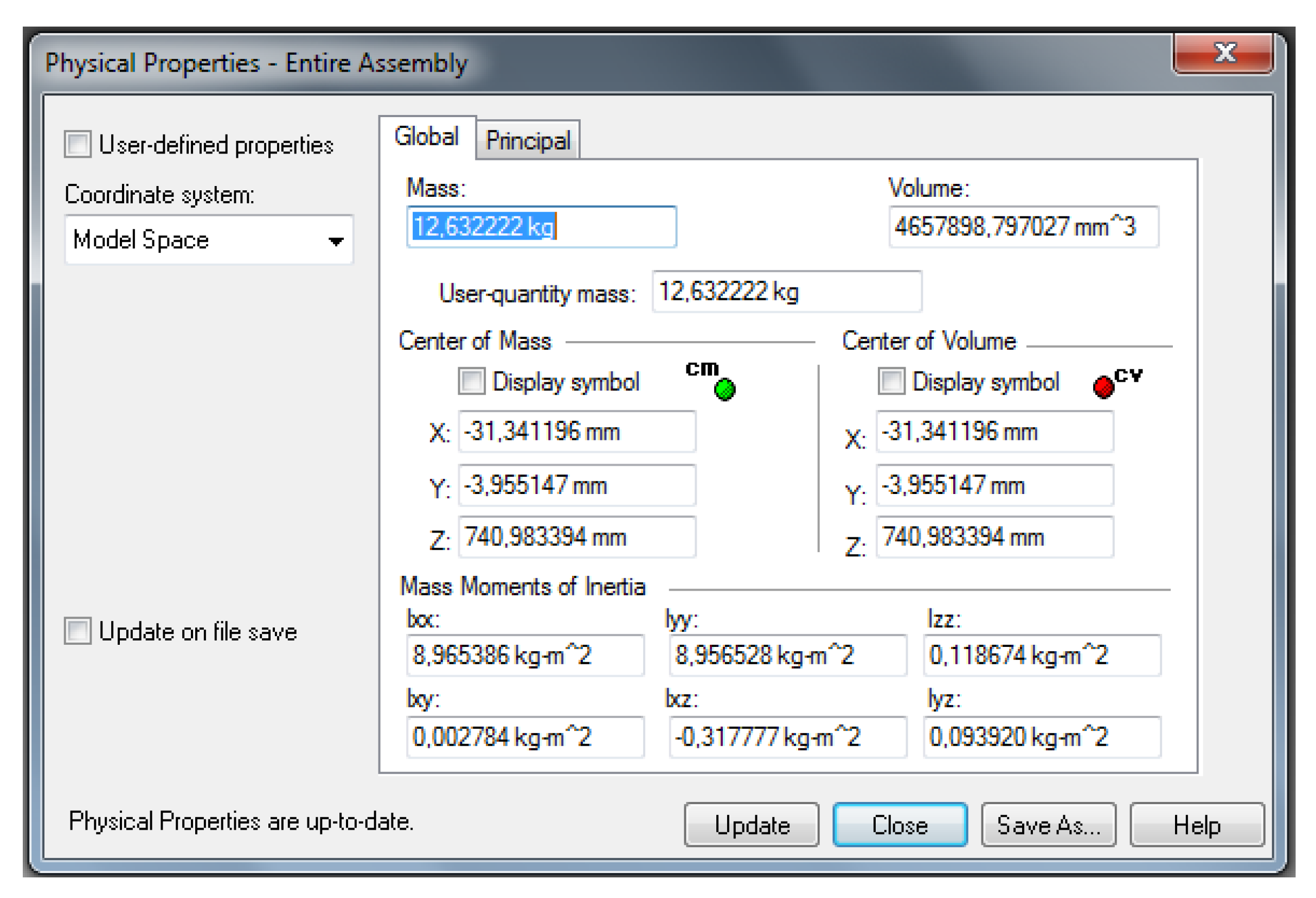
Characteristics of the Manipulator
3. Kinematic and Dynamic Modelling of the Robotic Manipulator
3.1. Forward Kinematics
3.2. Inverse Kinematics
3.3. Jacobian
3.4. Dynamic Modelling
4. Identification Methods
4.1. Least Squares (LS)
4.2. Recursive Least Squares (RLS)
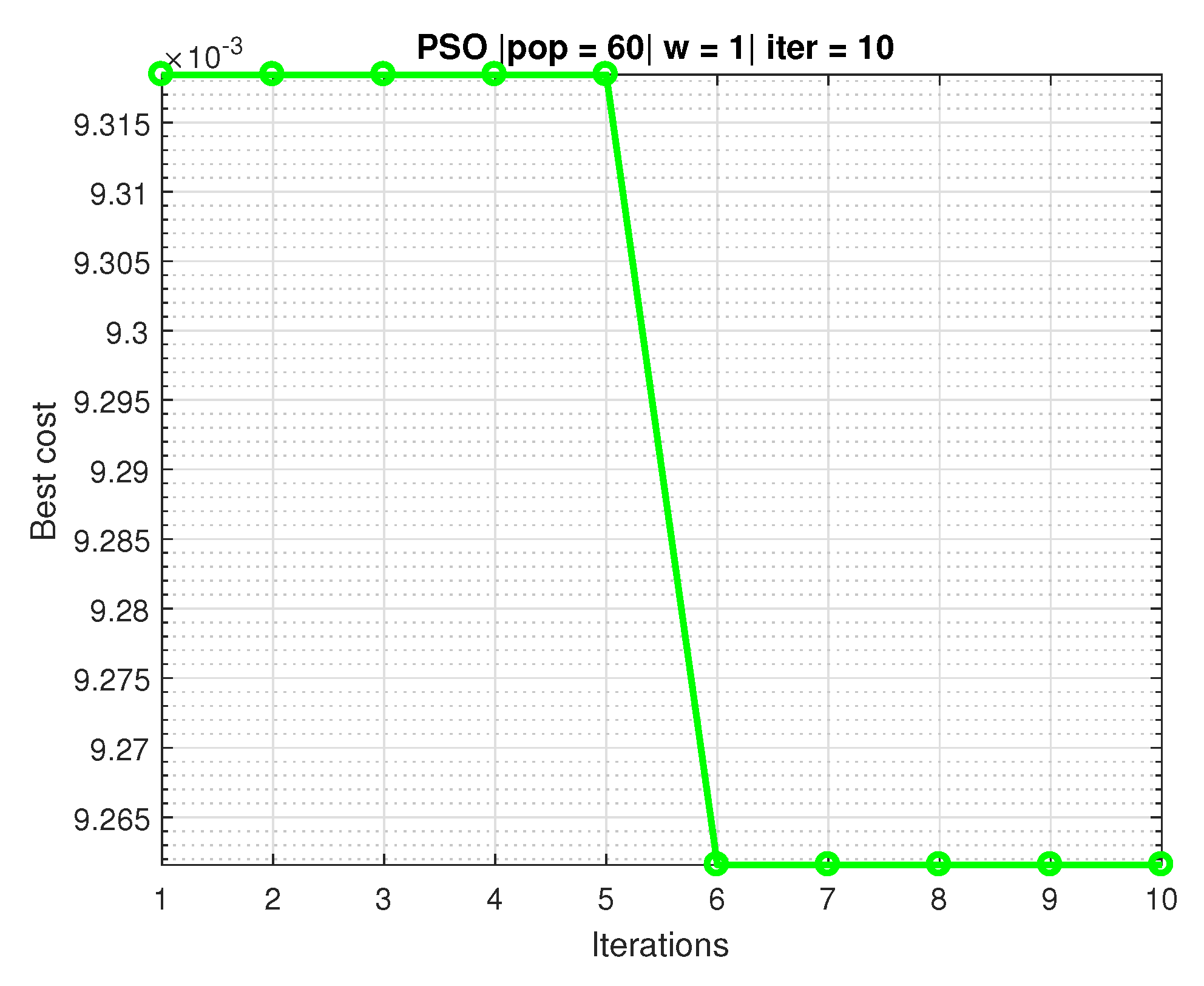
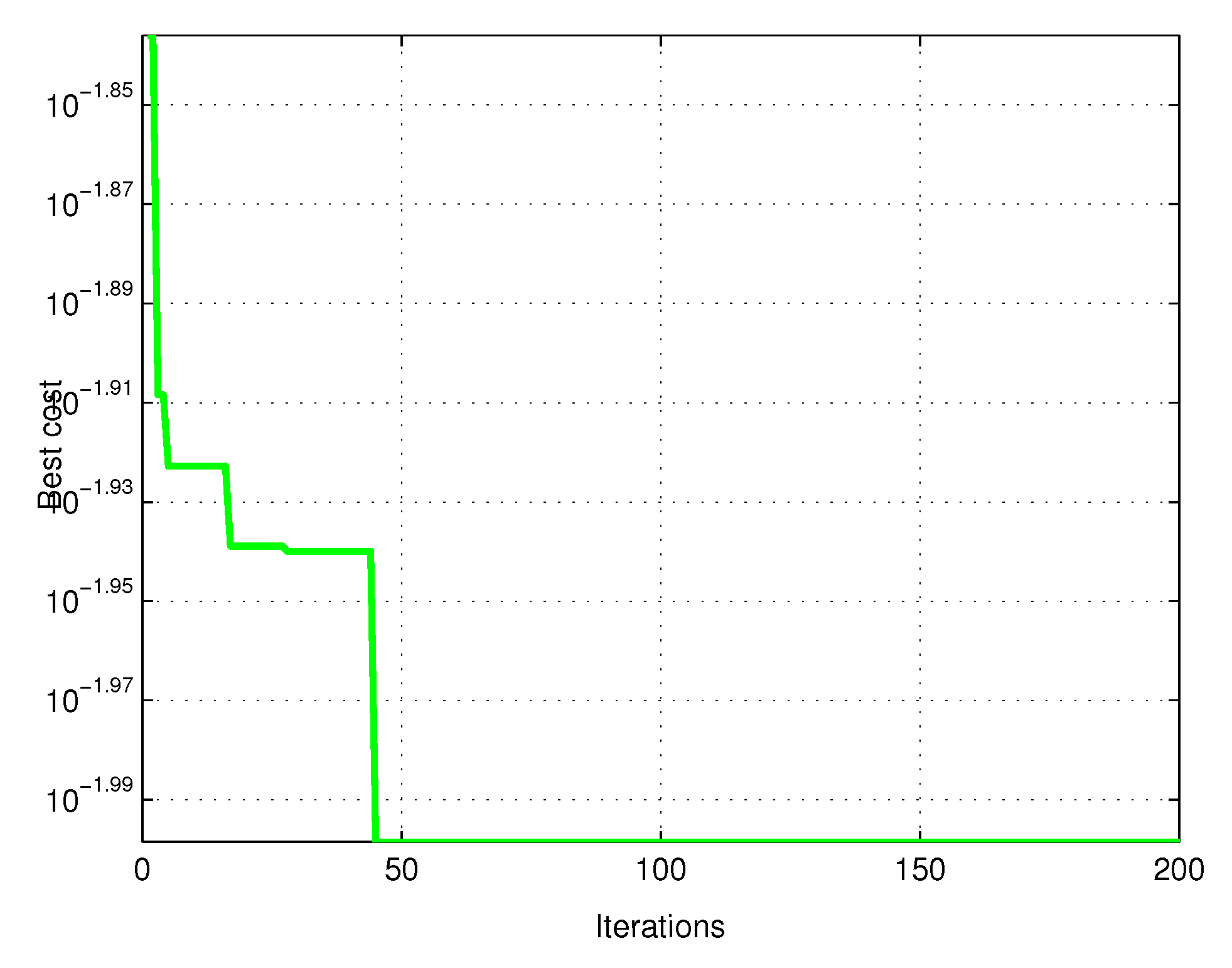
4.3. Recursive Least Squares with Particle Swarm Optimization (RLSPSO)
- Number of particles = 60 particles;
- Cognitive and social parameters (learning rates): = 3.1 and = 3.9;
- Iterations = 10 iterations;
- Inertia factor (w) = 1.0;
- Initial population generation = used a rand in a generic equation that is restricted to the interval [0.01, 50].
| Algorithm 1: PSO Algorithm |
| 1: initiate the swarm of particles and define P Matrix; 2: repeat 3: for to m 4: if then 5: ; 6: if then 7: ; 8: end if 9: end if 10: for to n 11: , ; 12: ; 13: end for 14: ; 15: end for 16: to satisfy the stopping criterion 17: Optimal value of P convariance matrix |
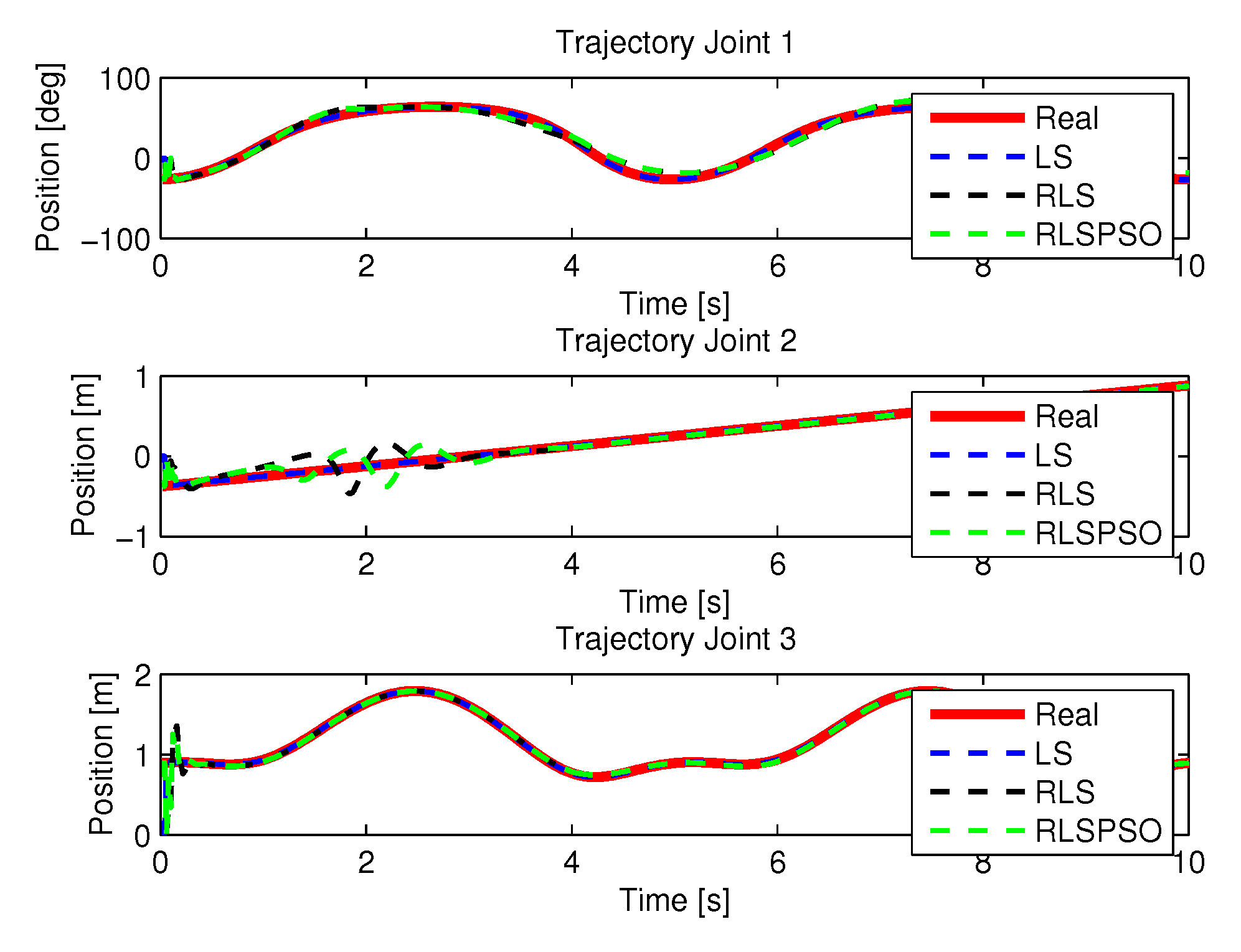
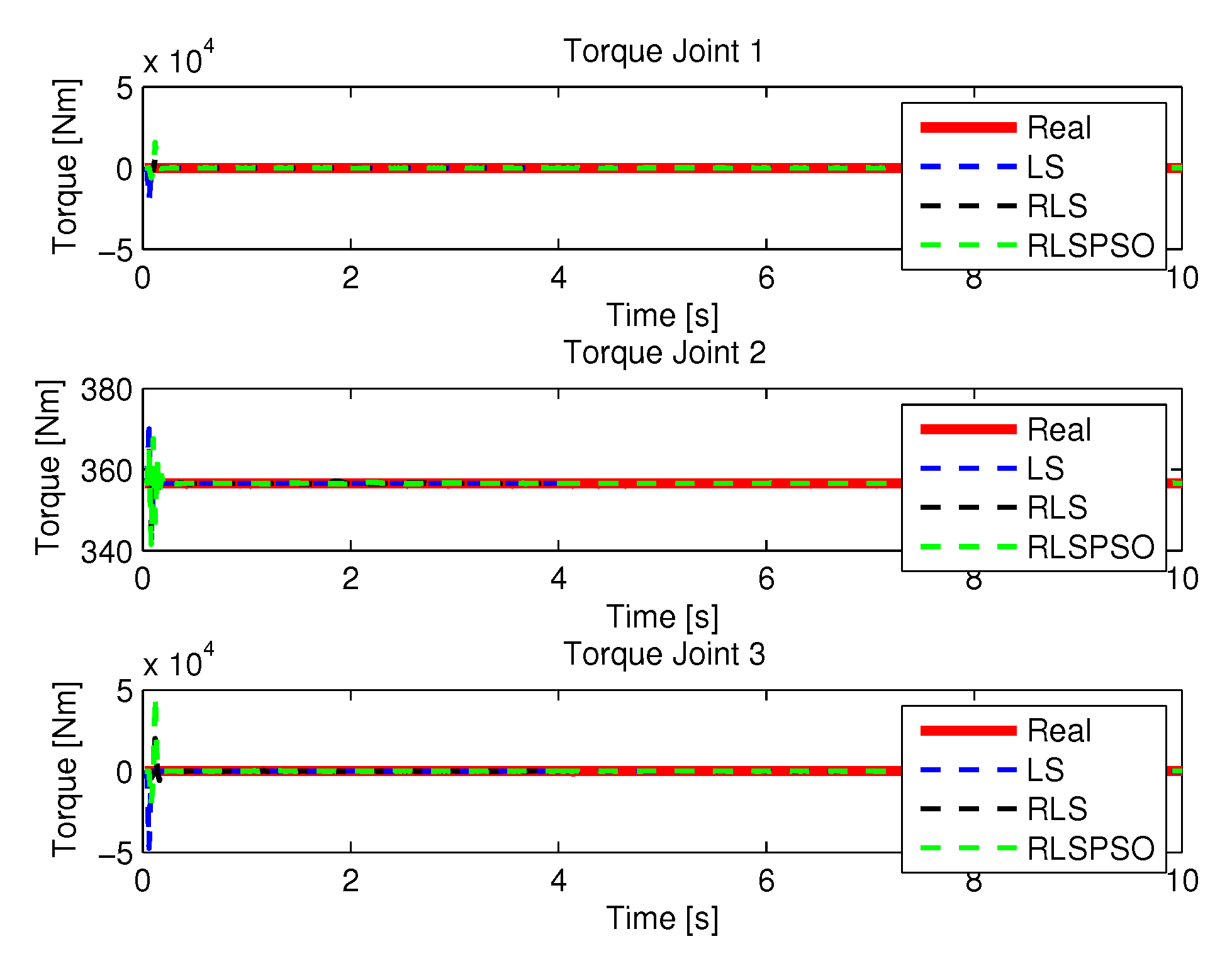
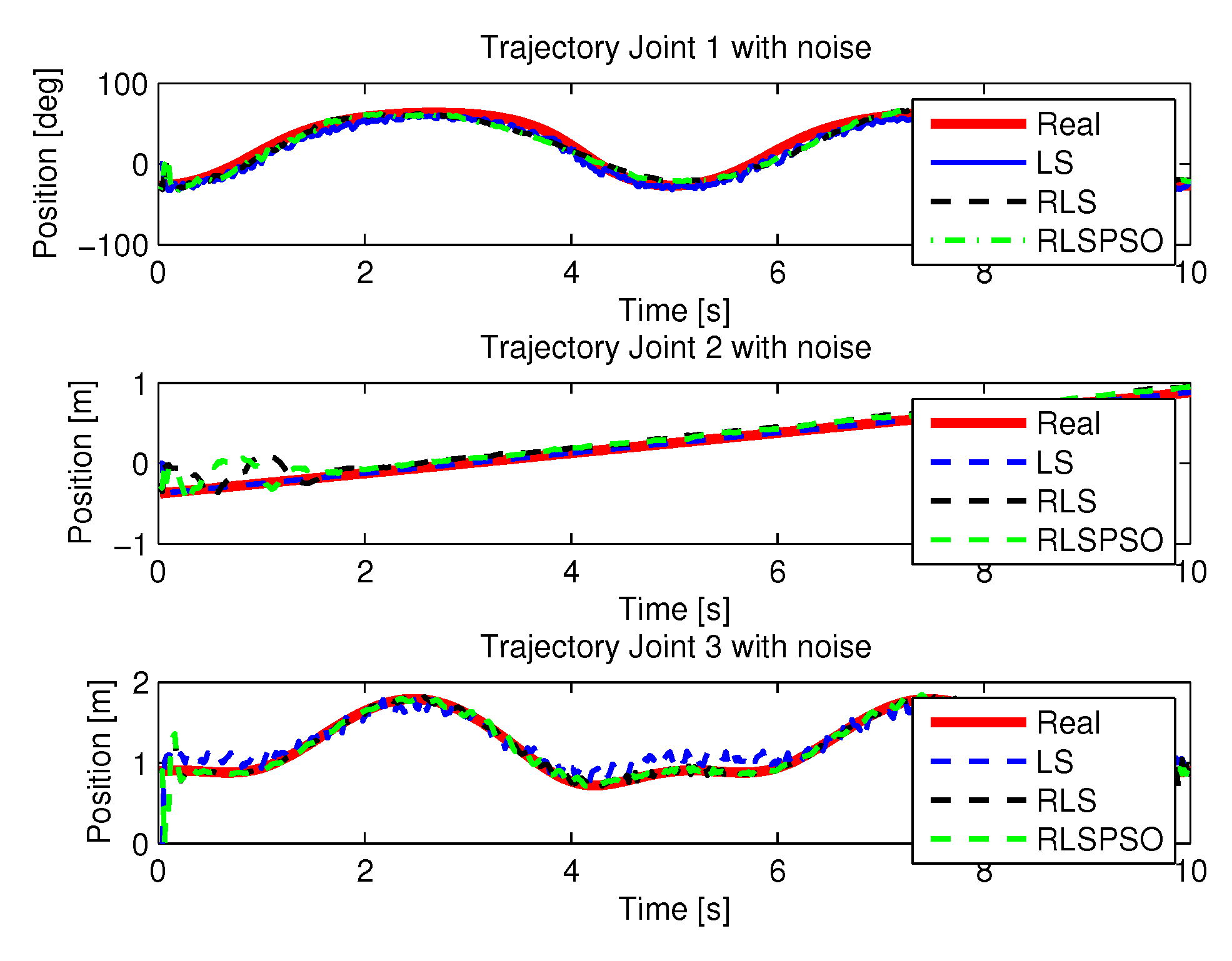
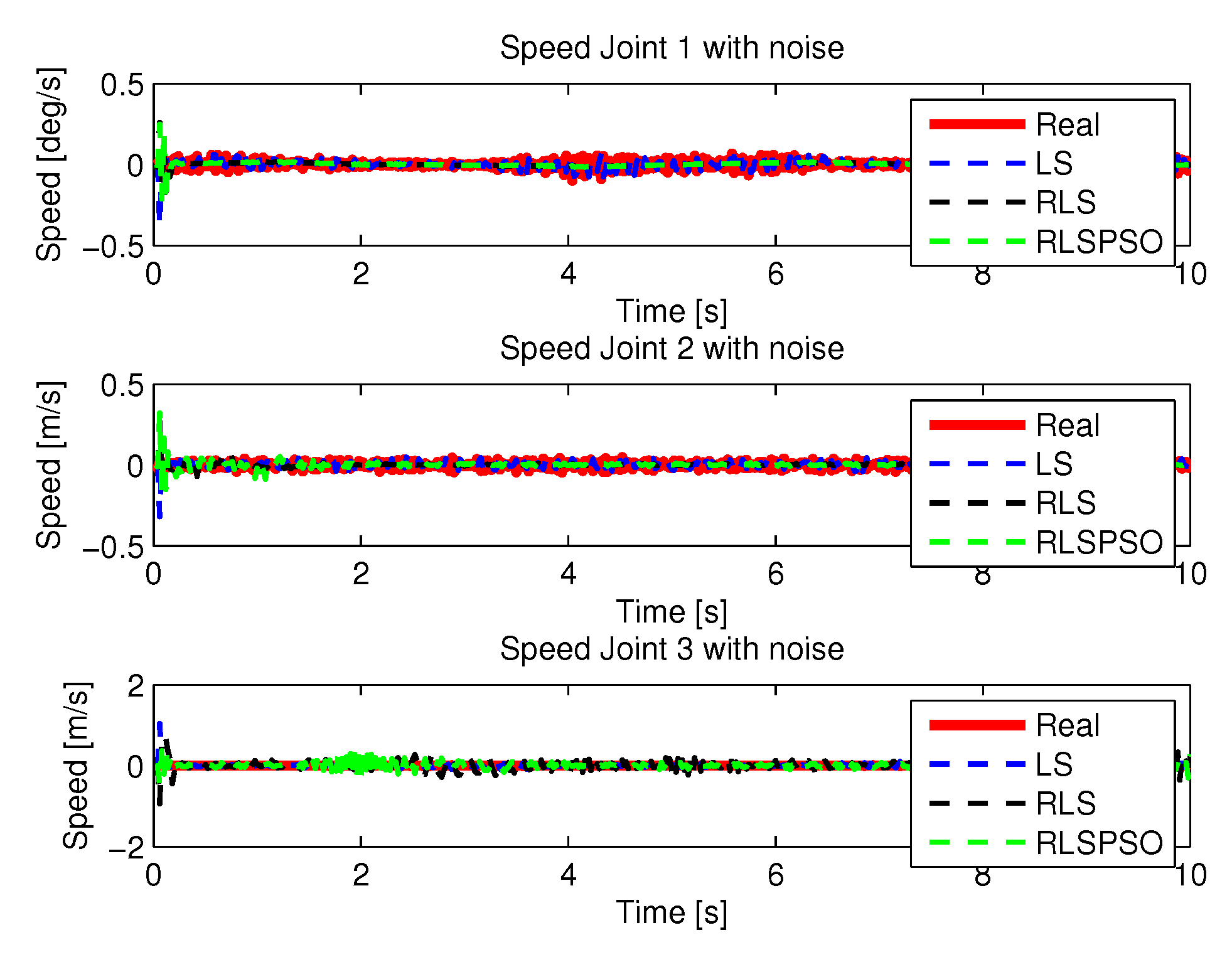
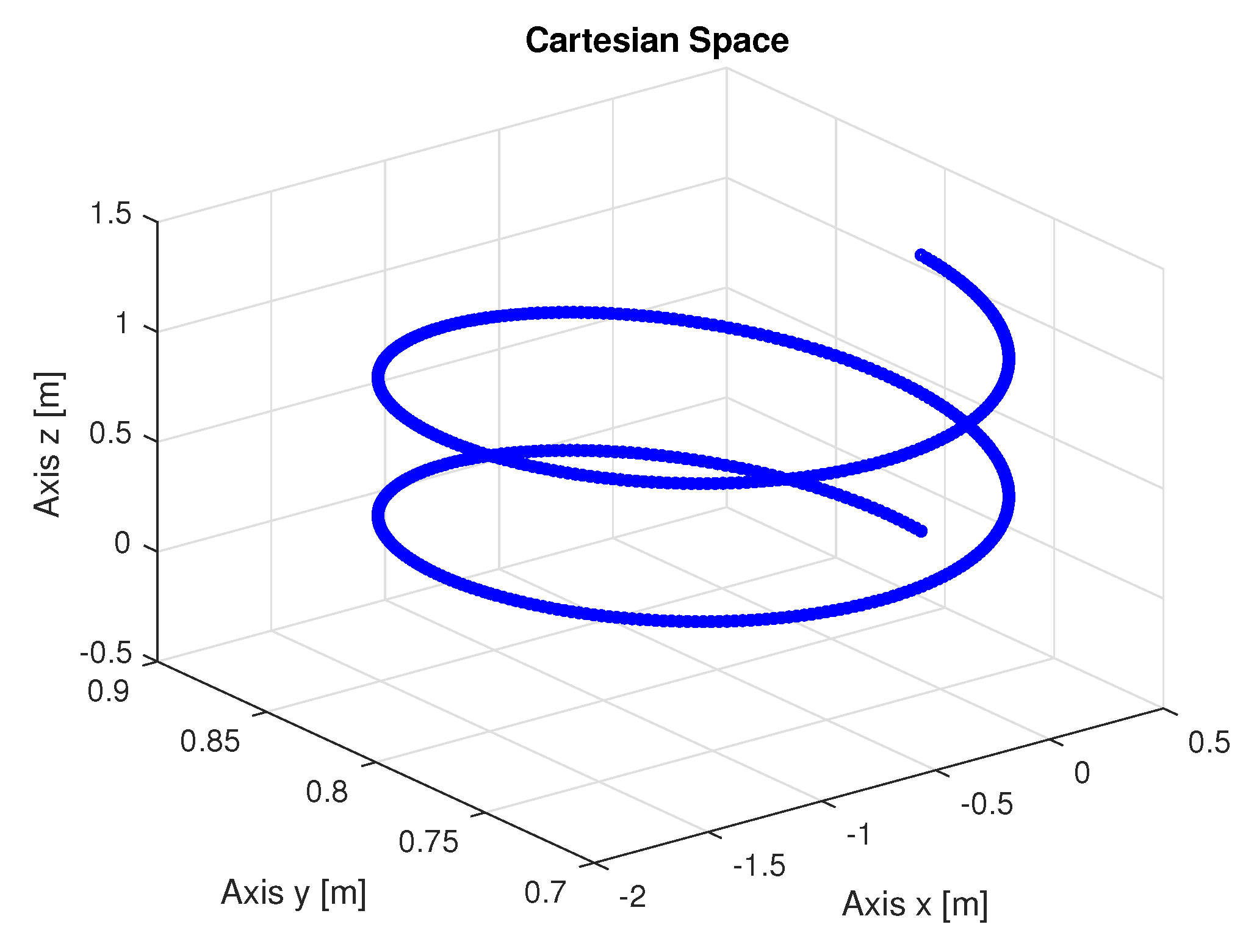
5. Results
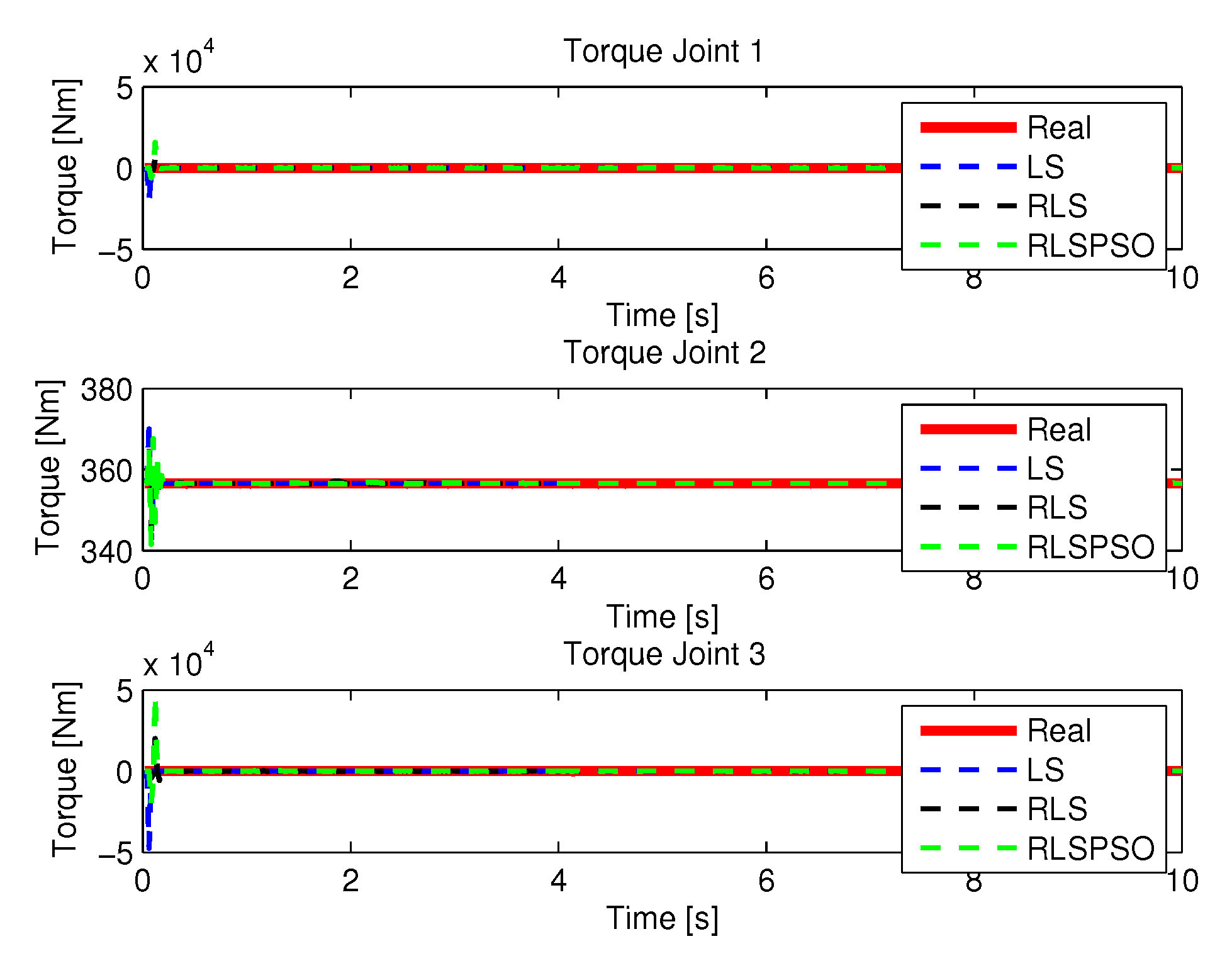
5.1. Noise-Free results
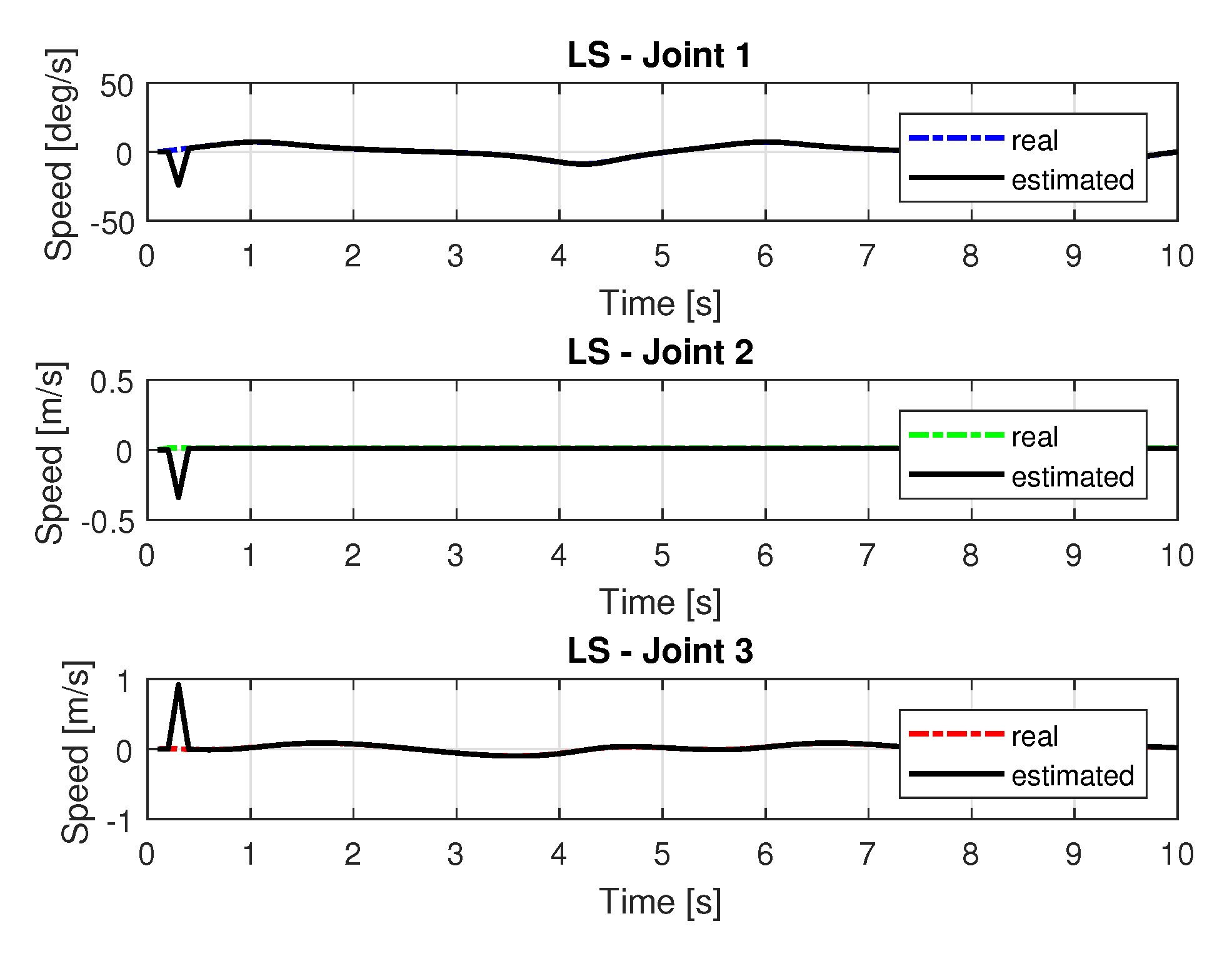
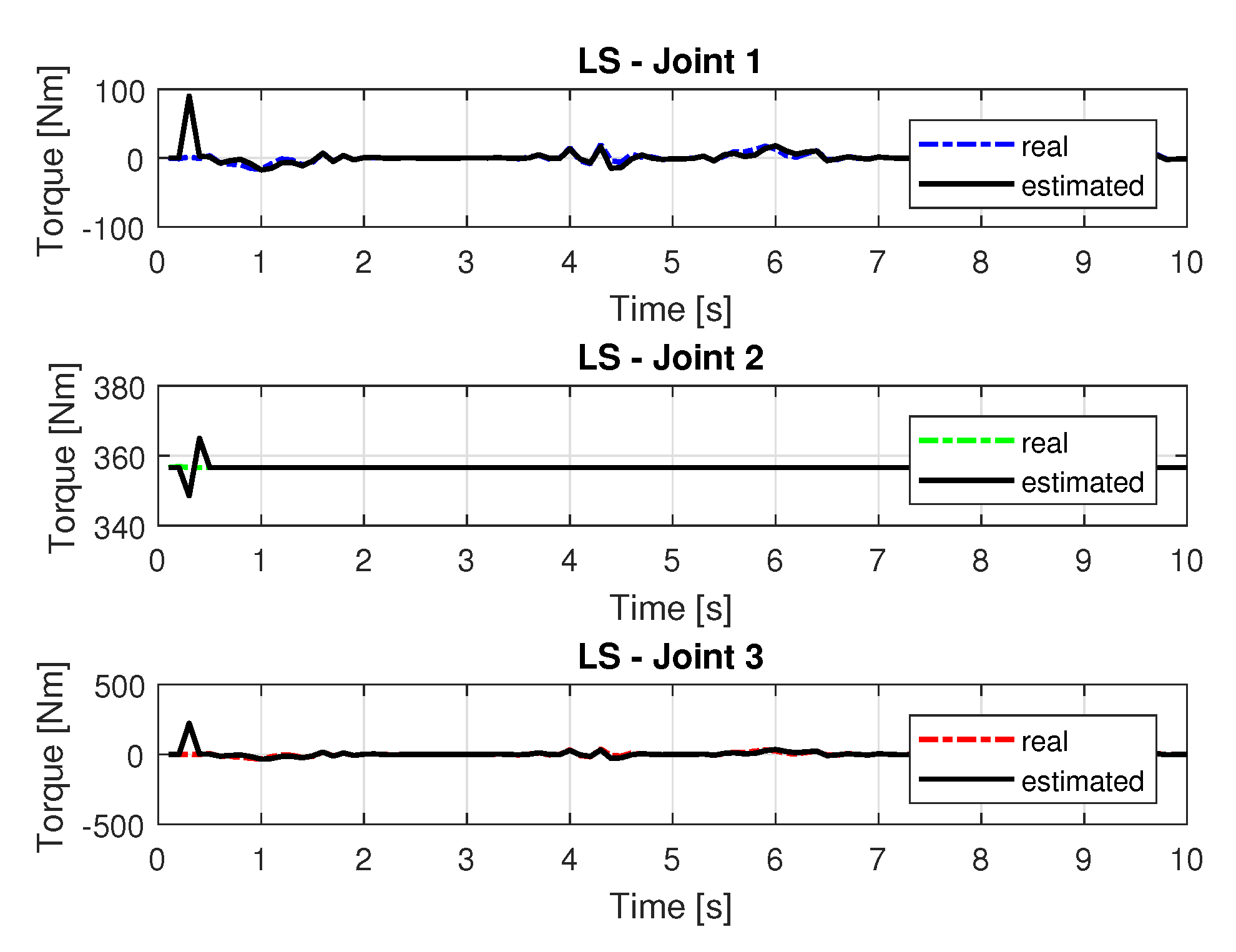
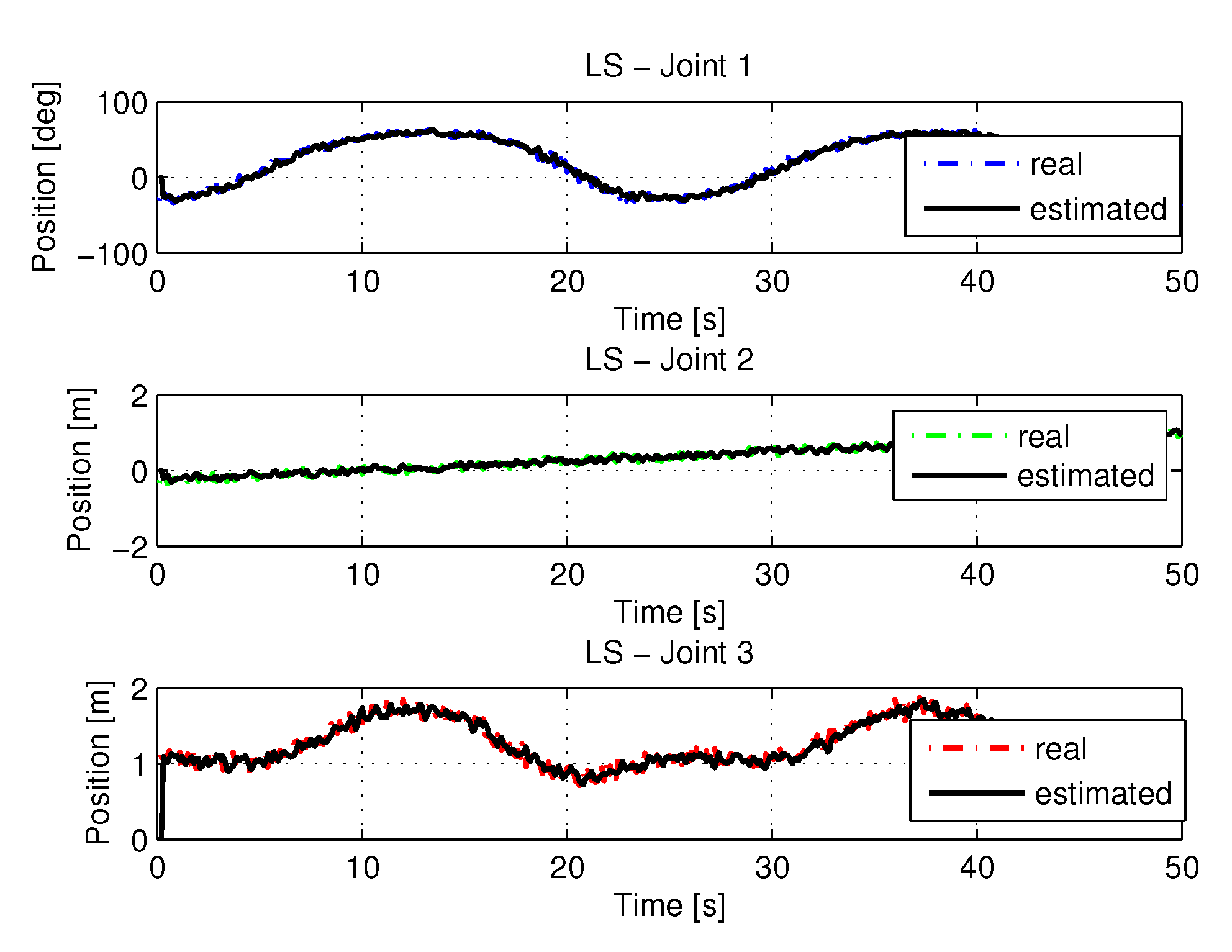
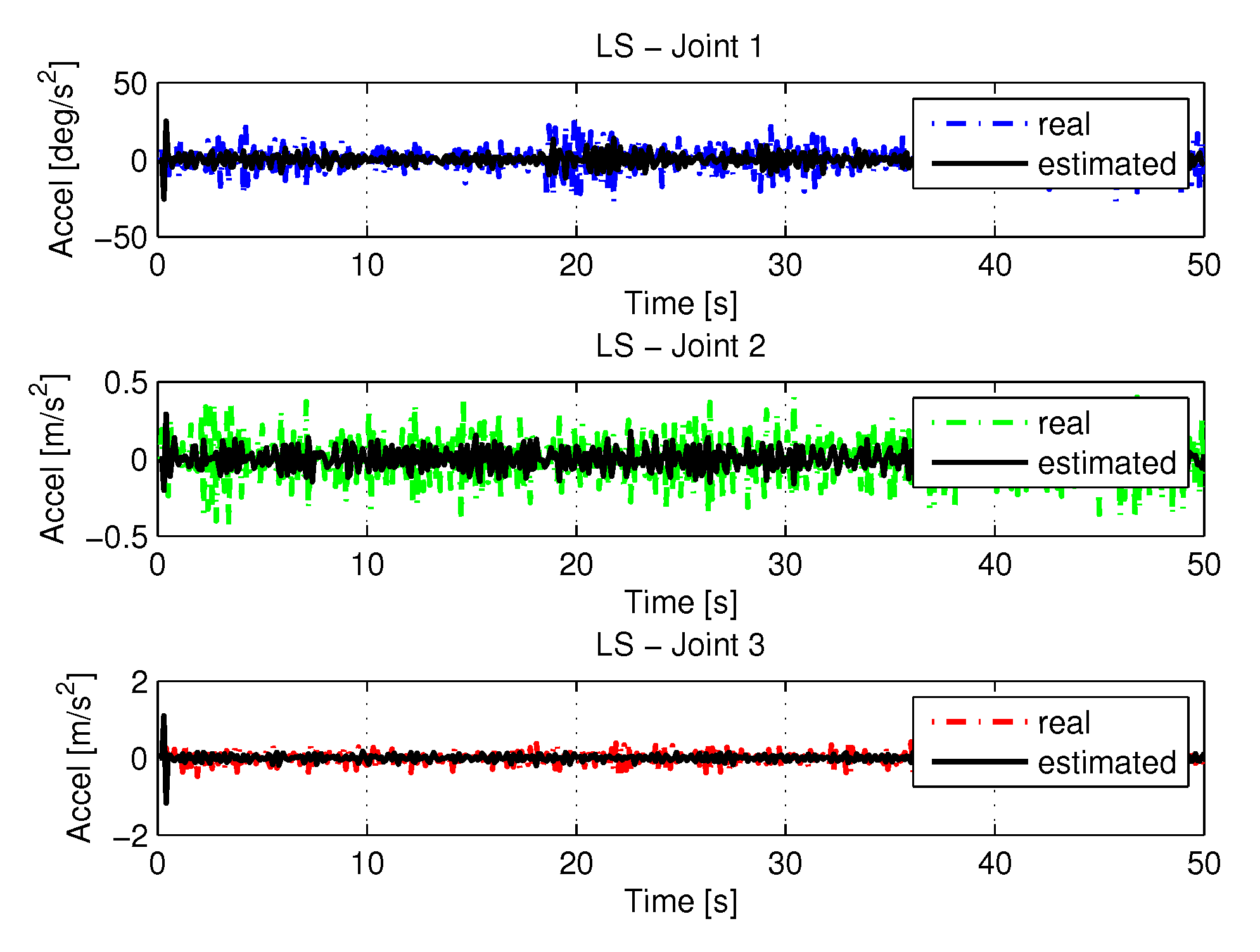
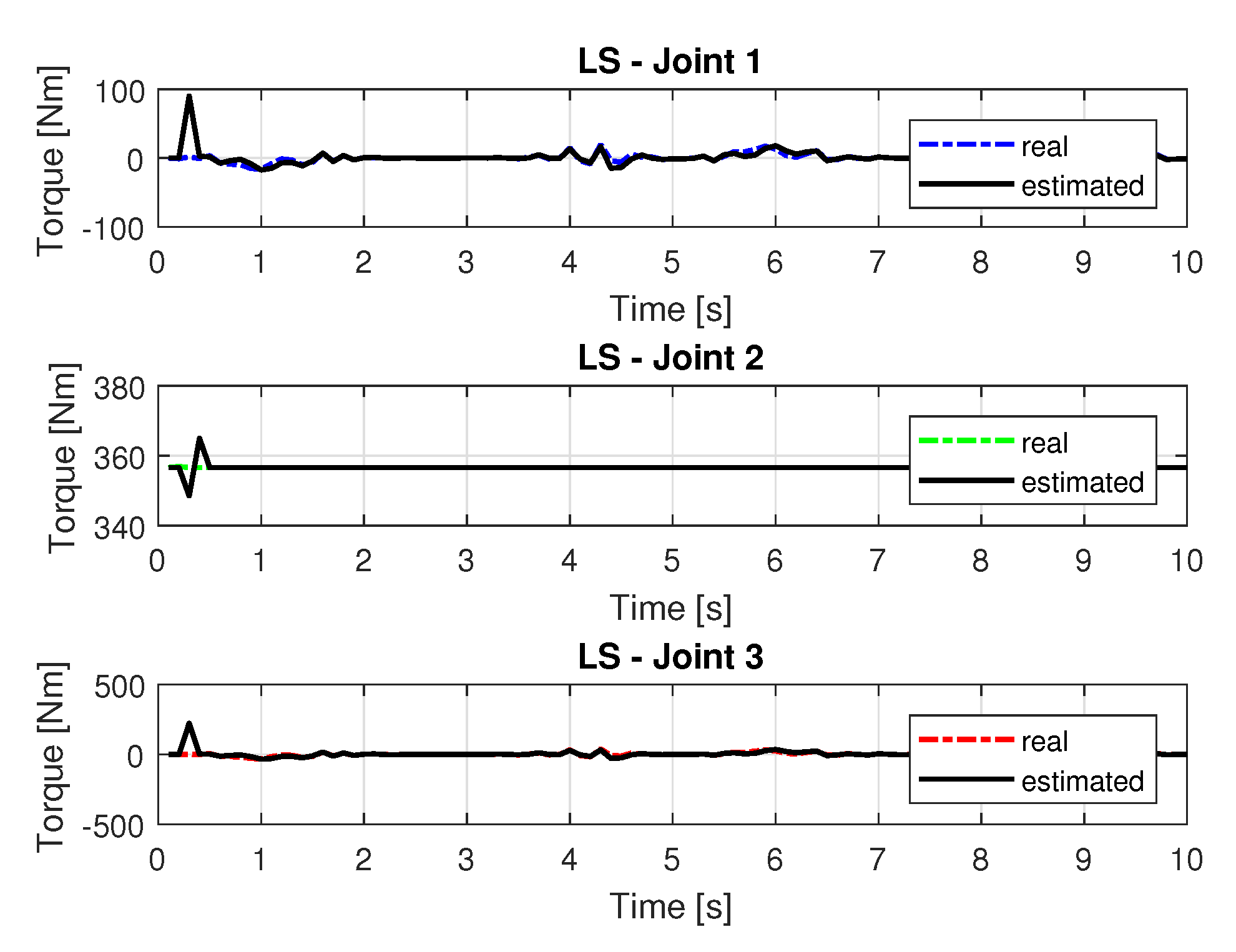
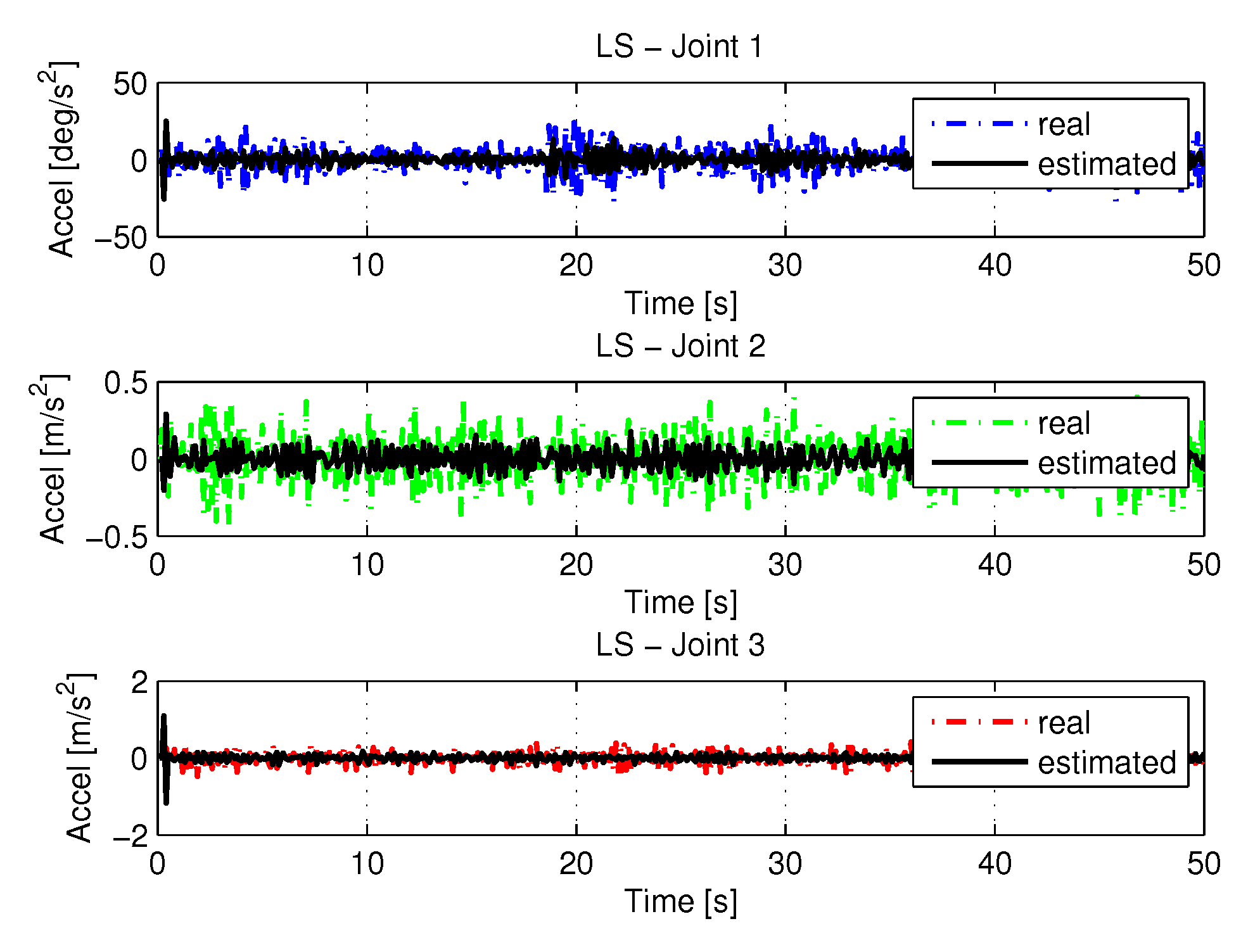
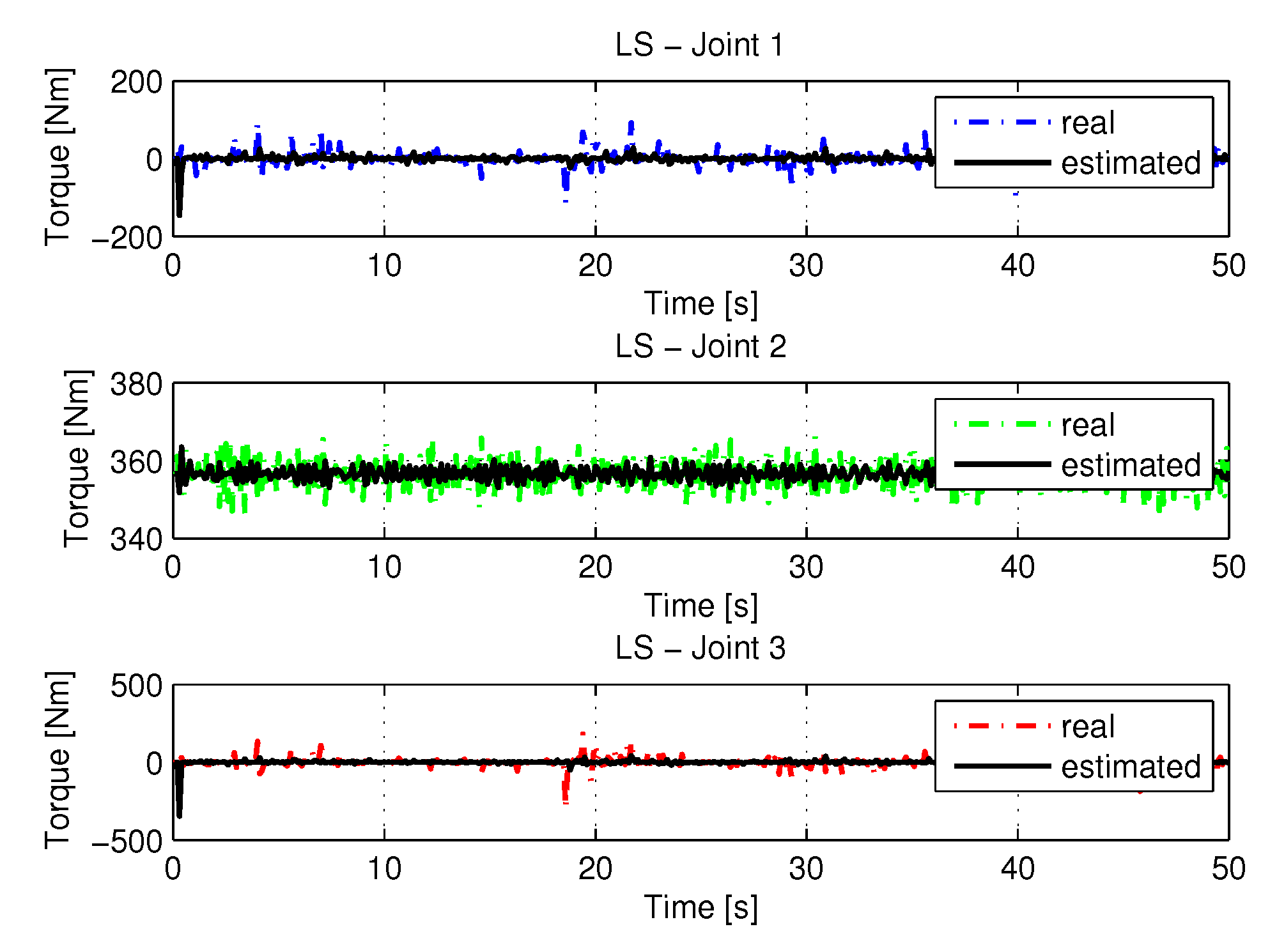
5.1.1. Results of LS
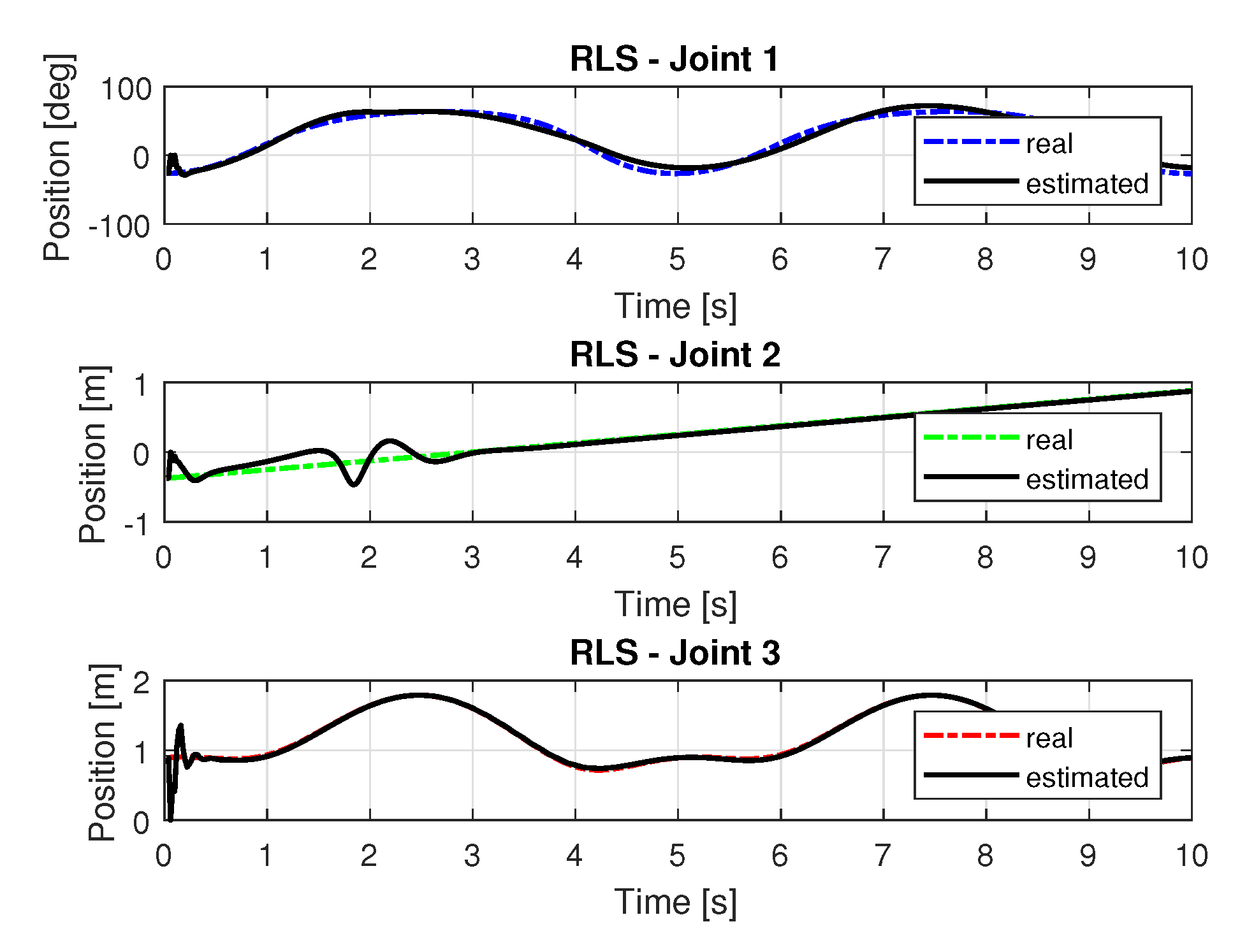
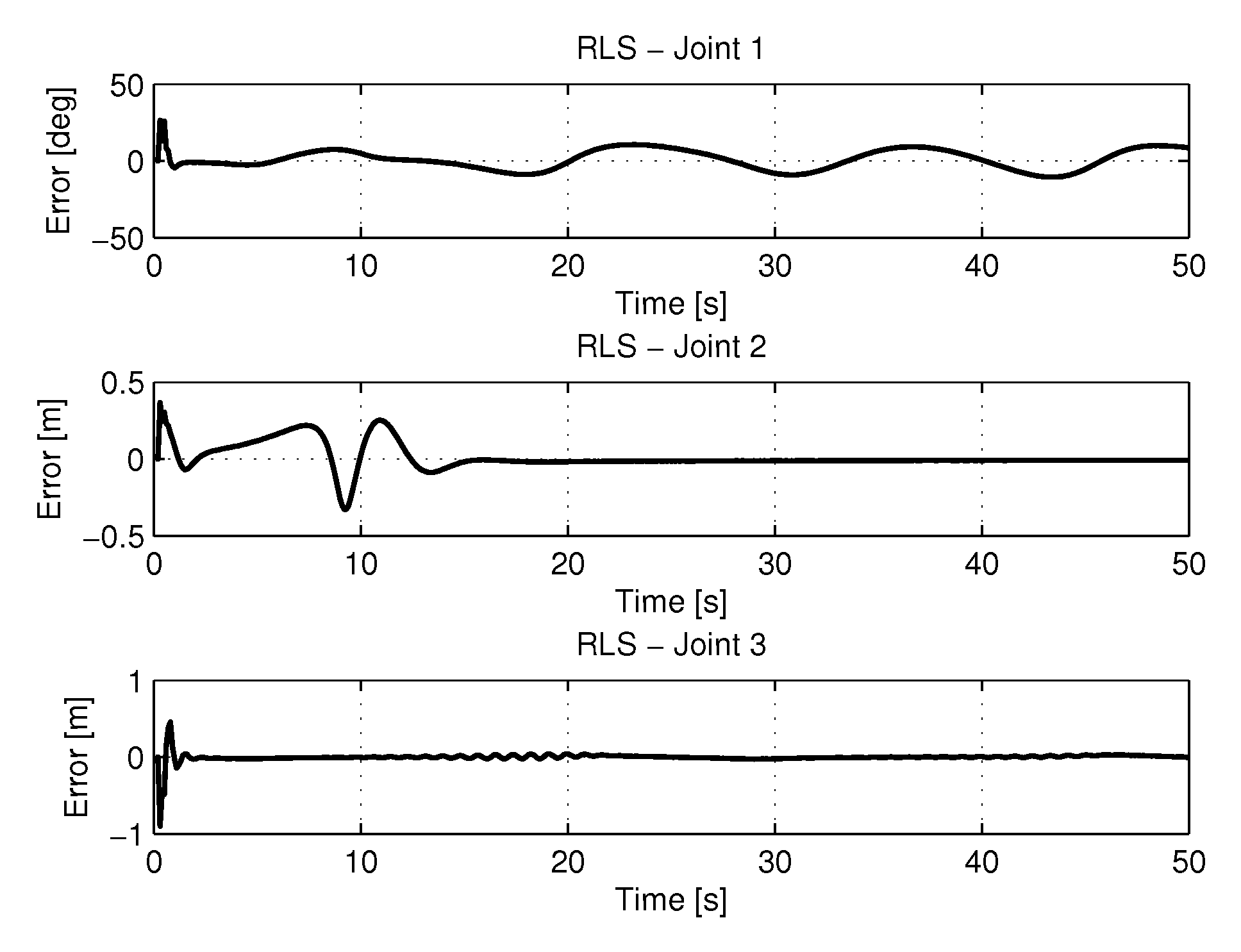
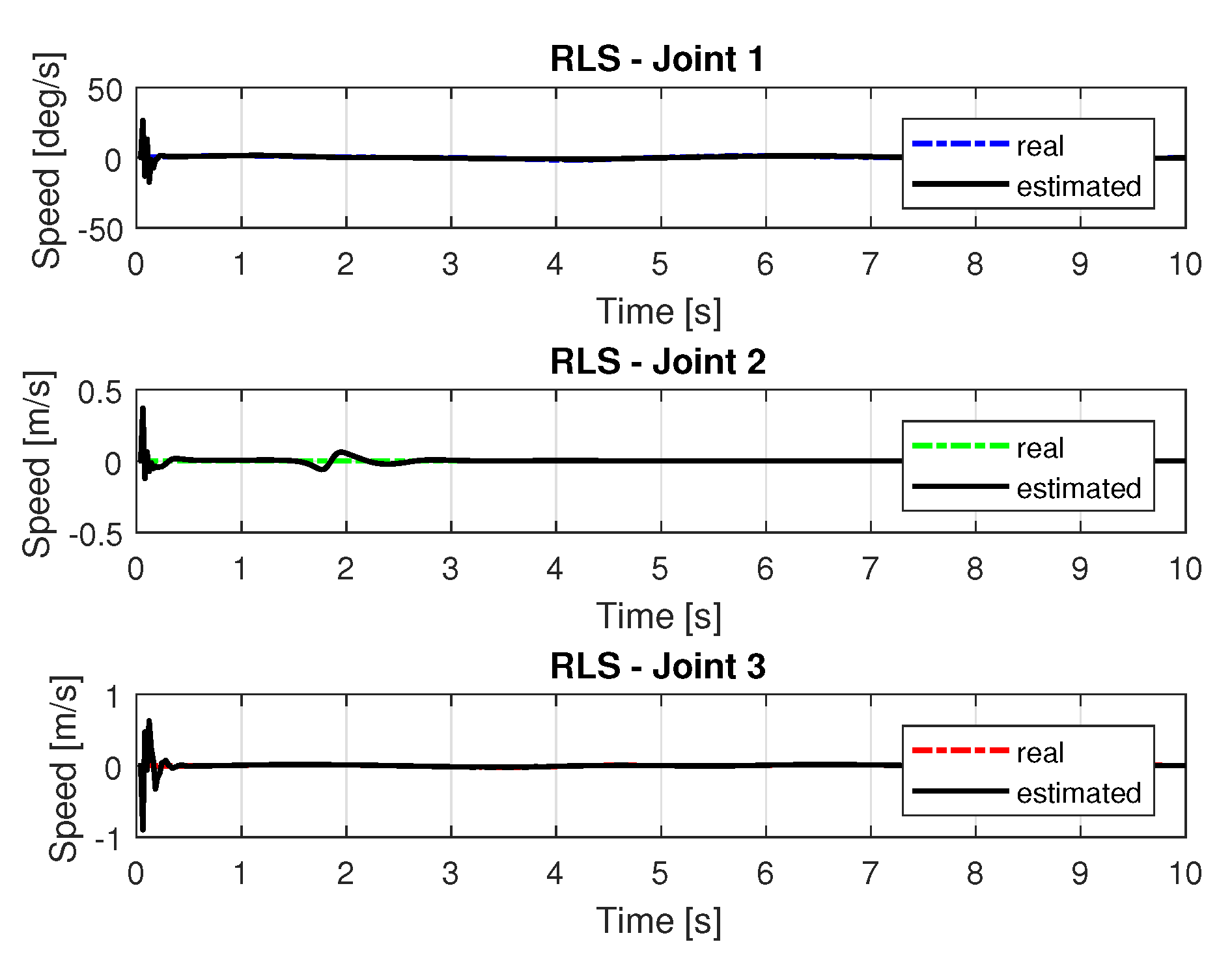
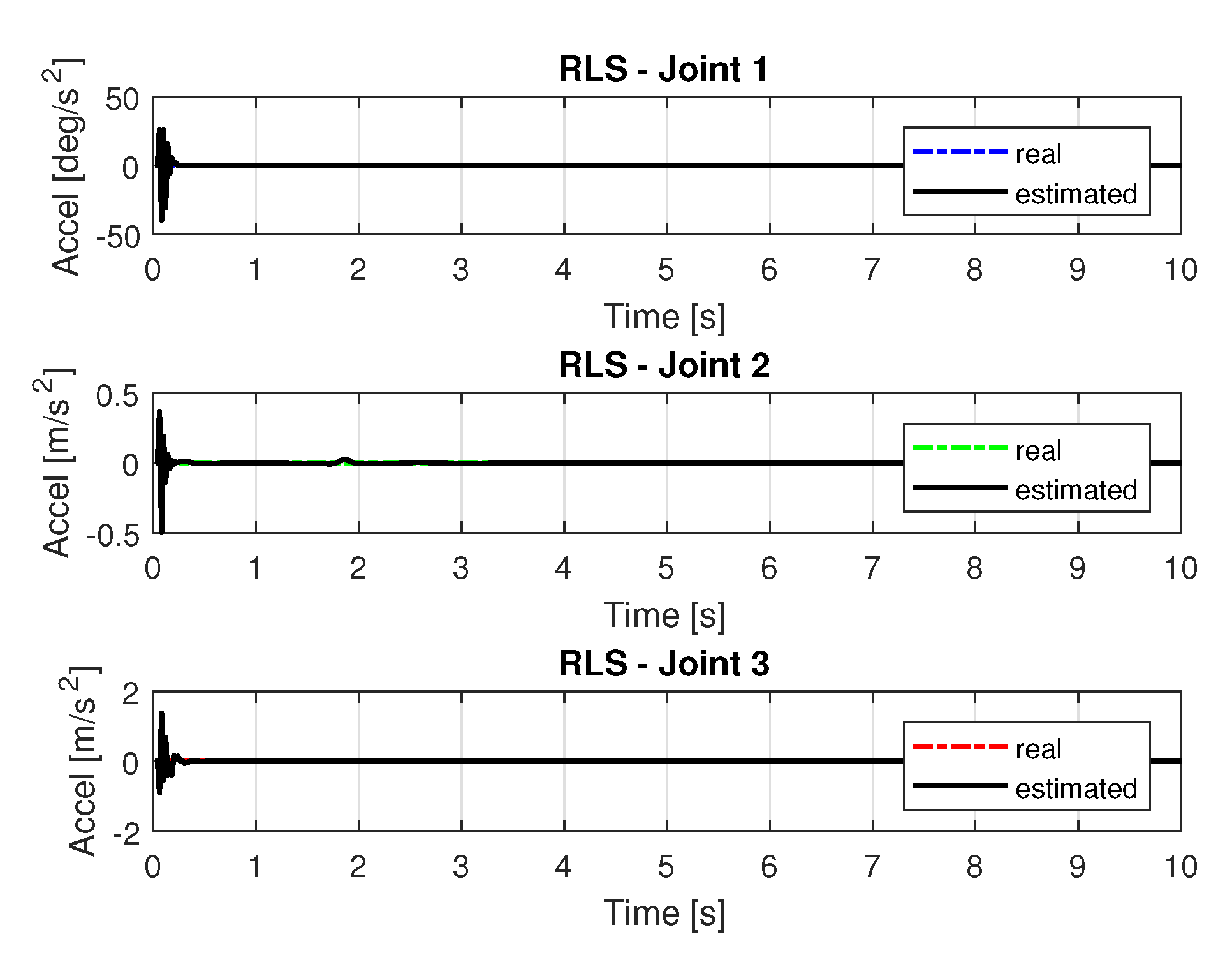
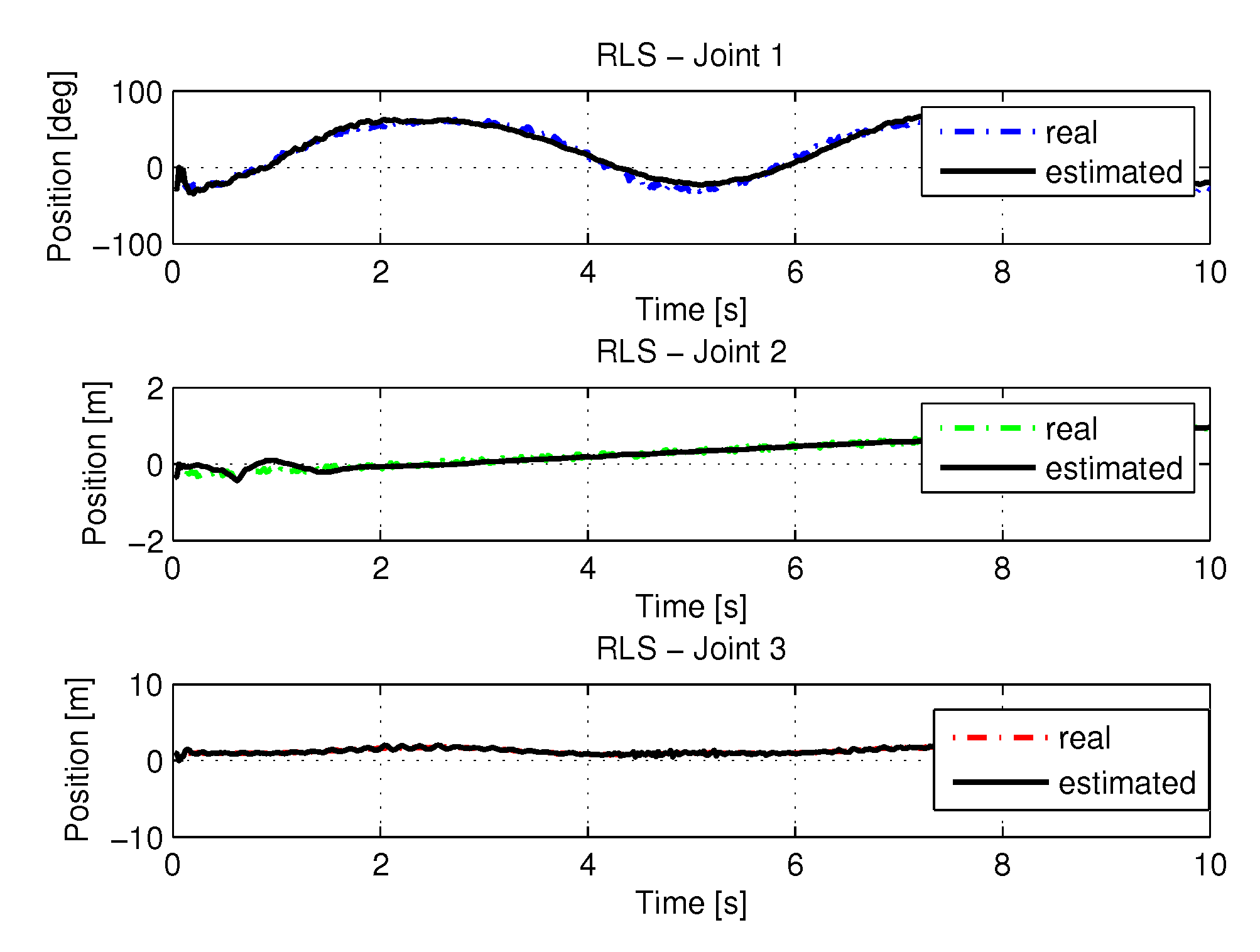
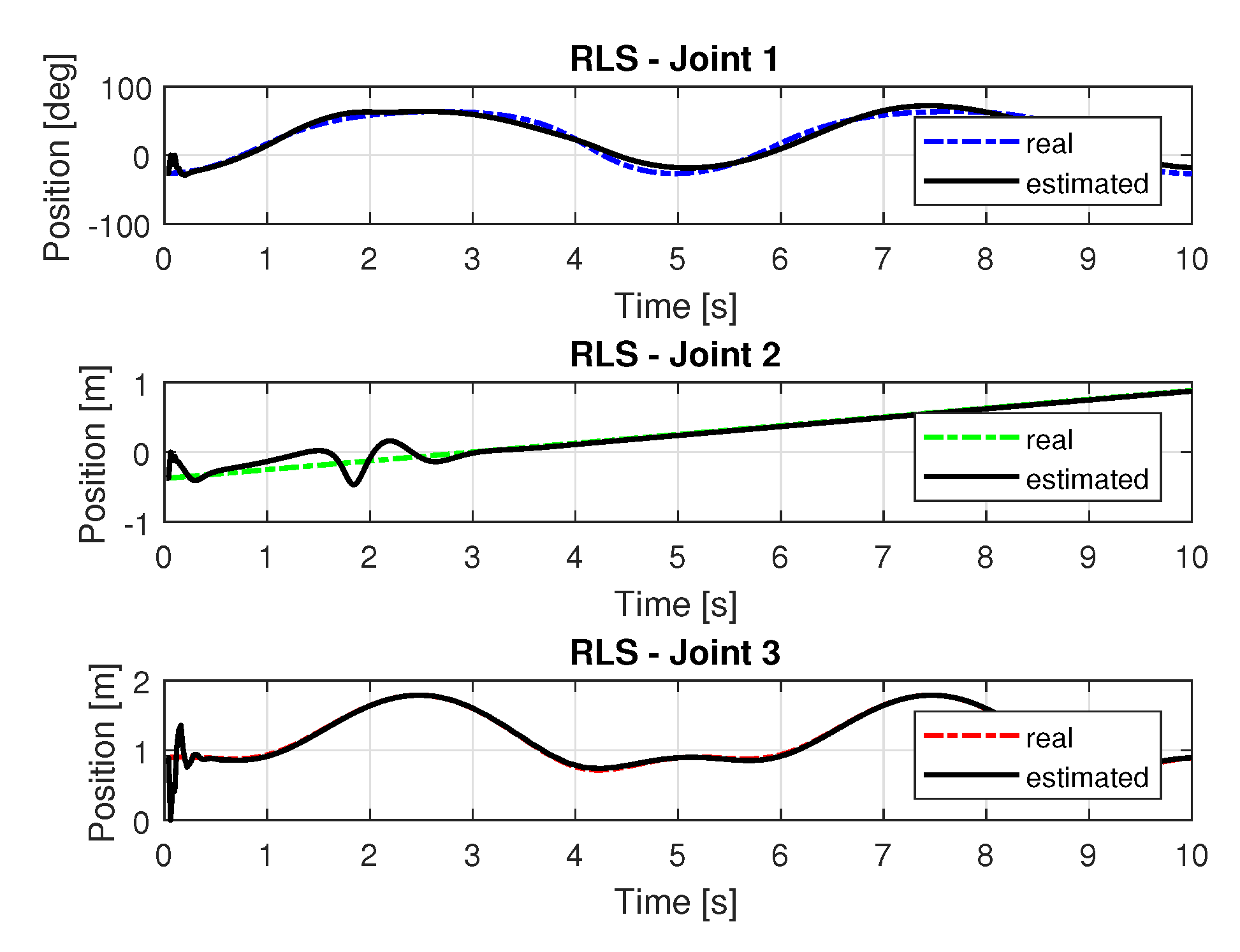
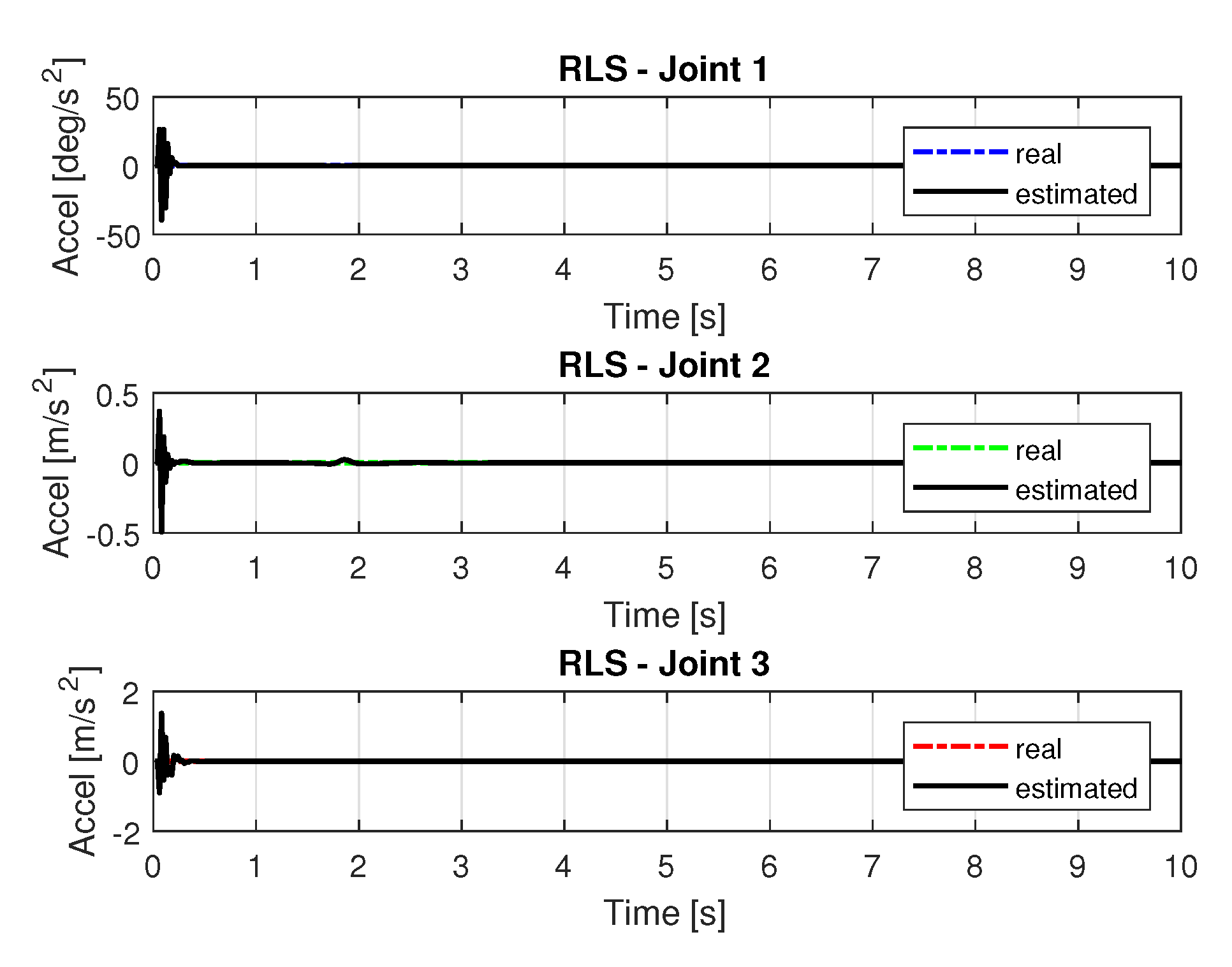
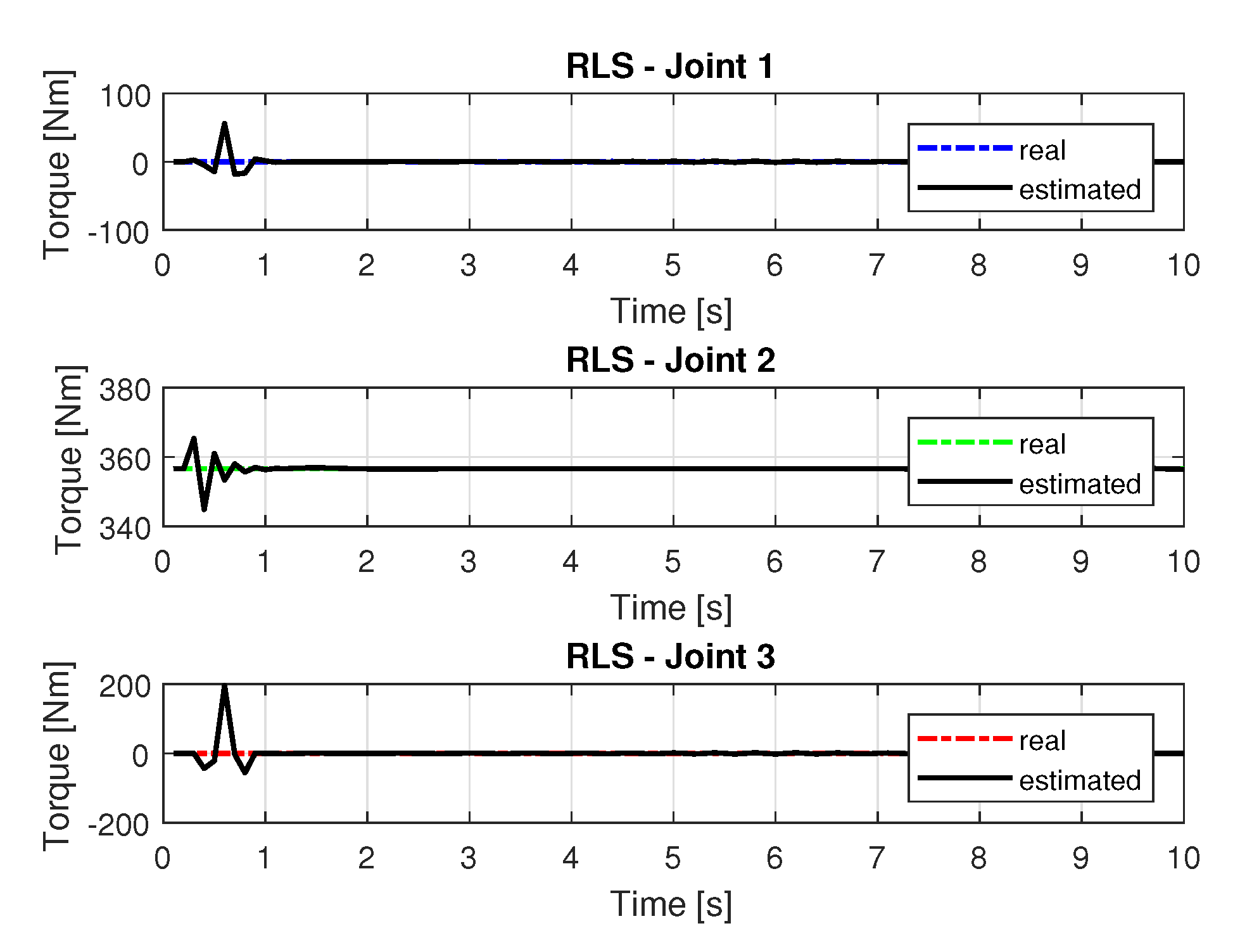
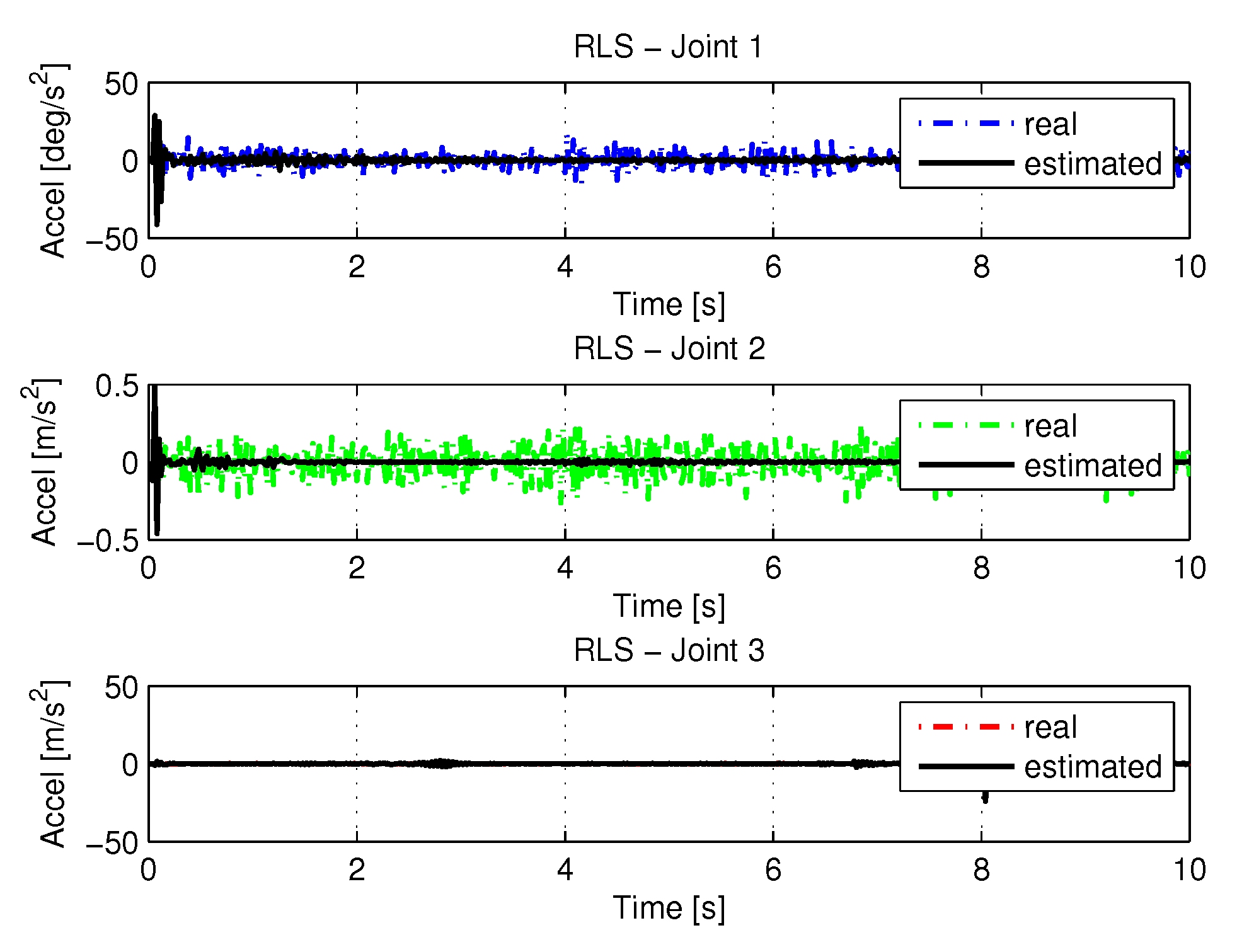
5.1.2. Results of RLS
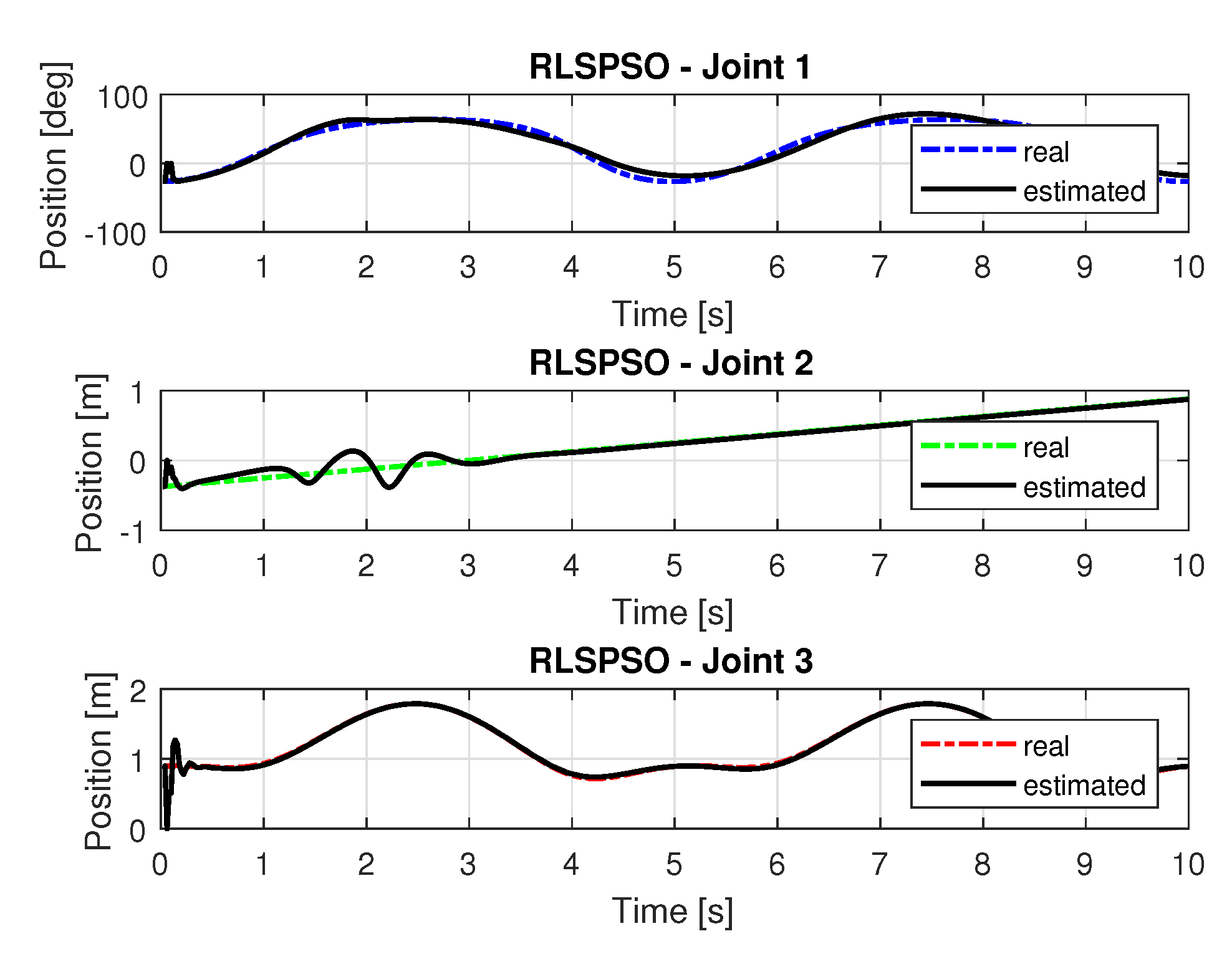
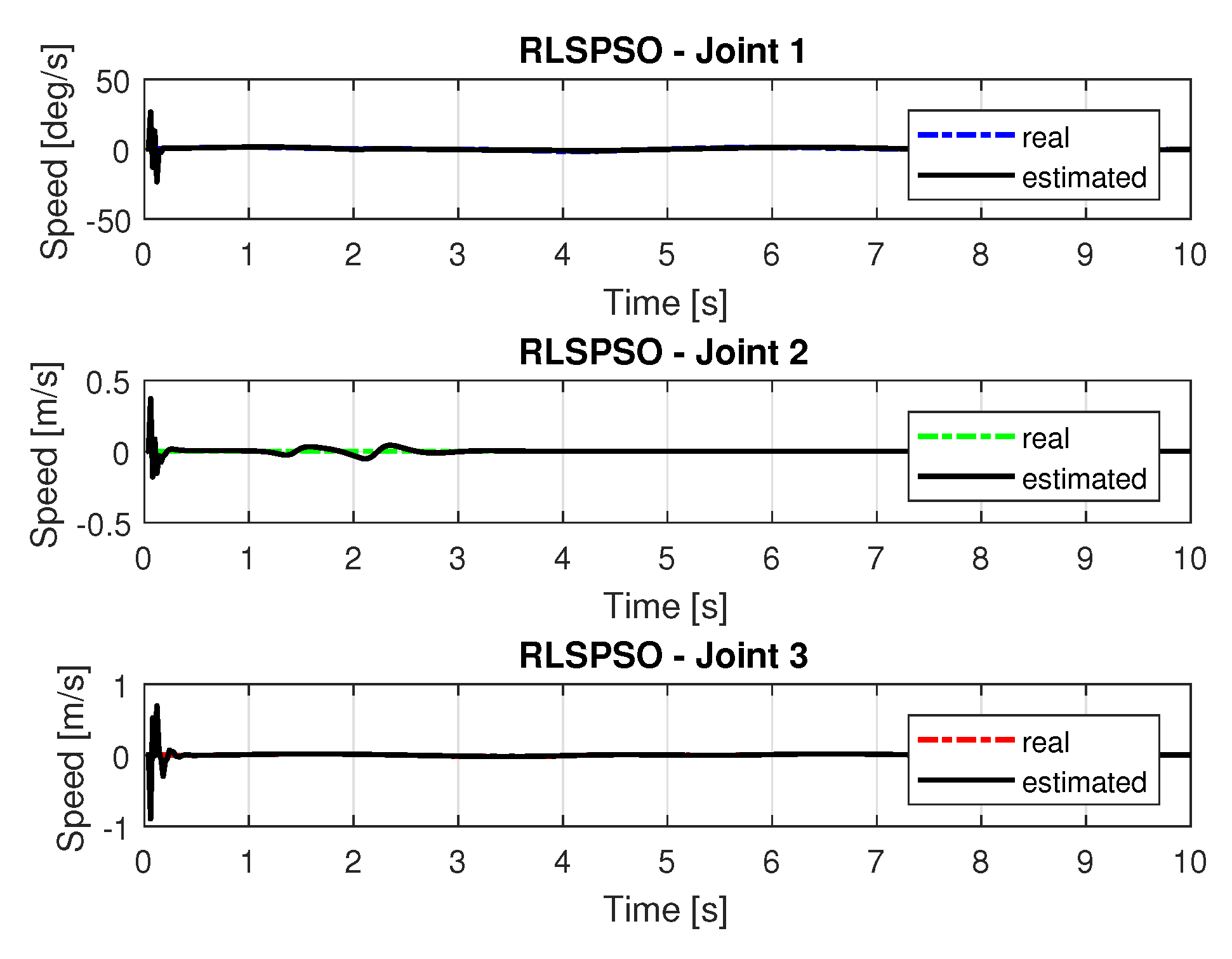
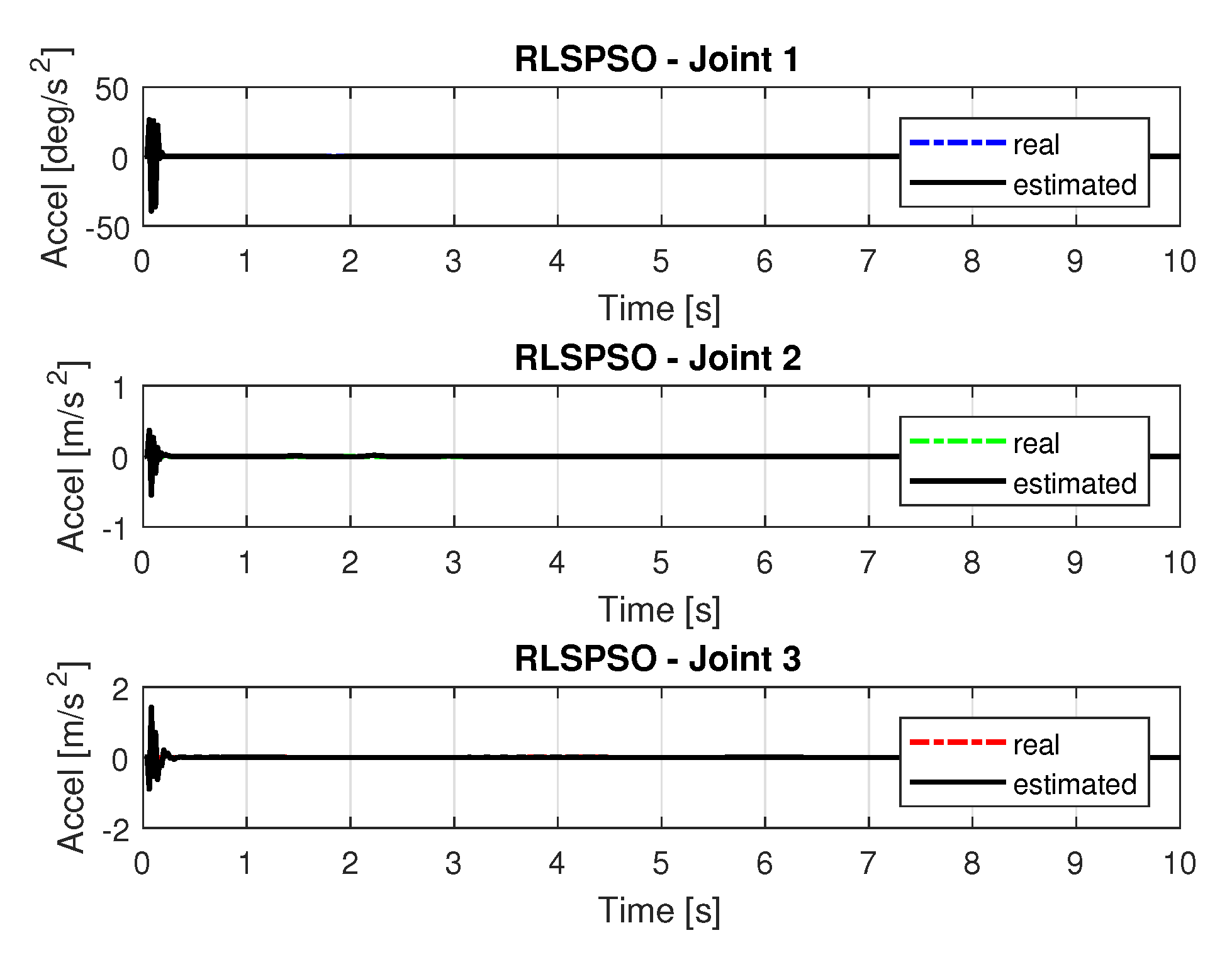
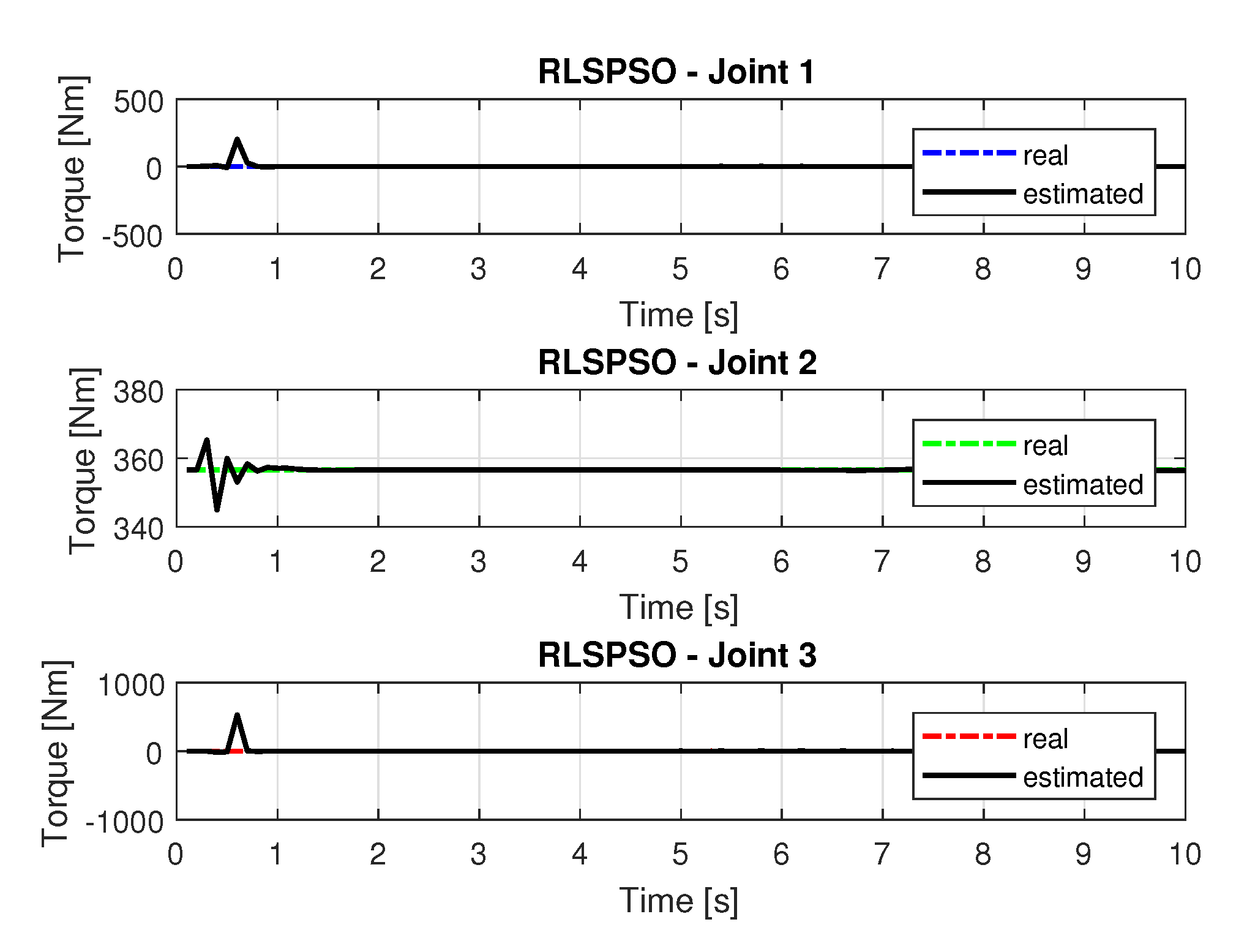
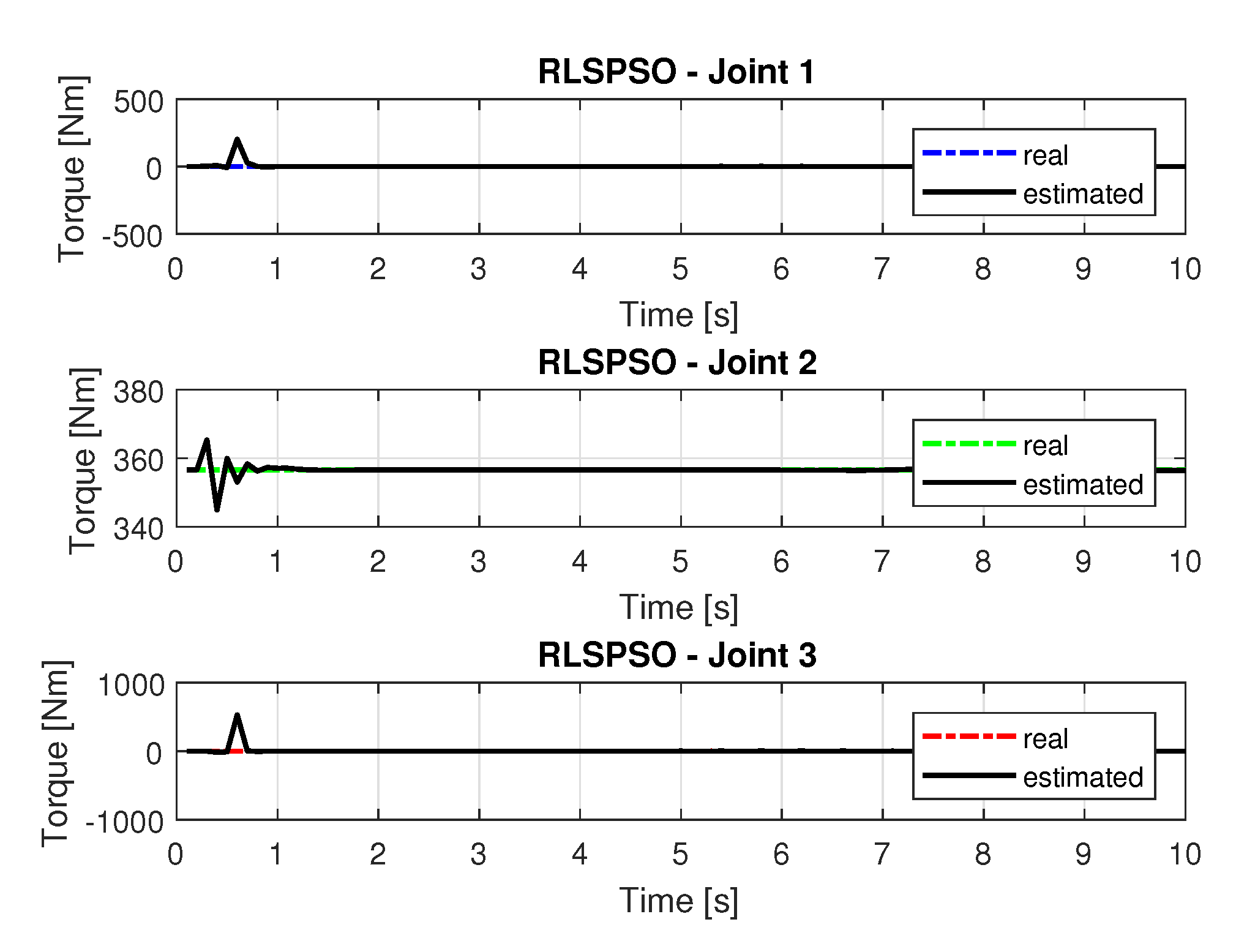
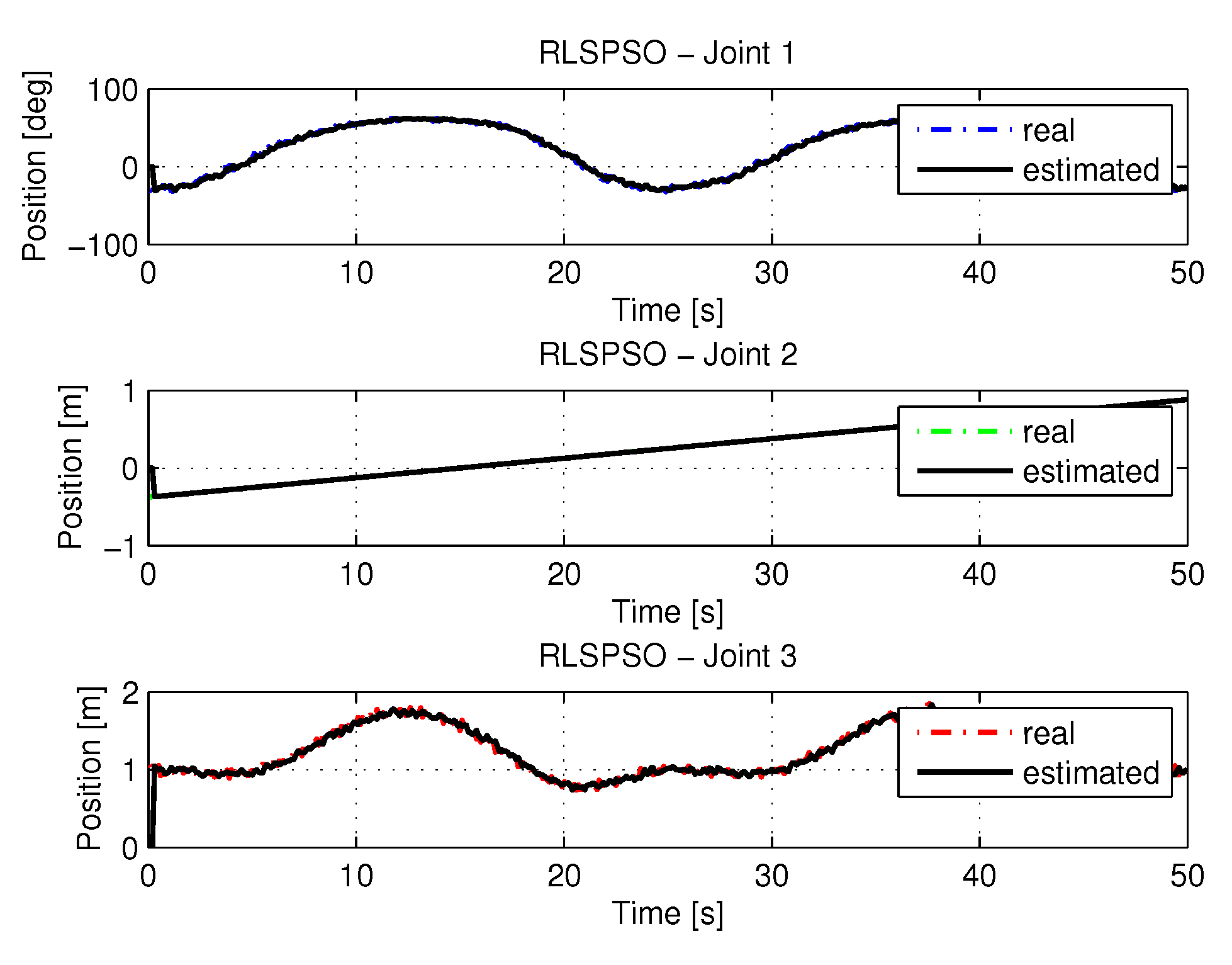
5.1.3. Results of RLSPSO
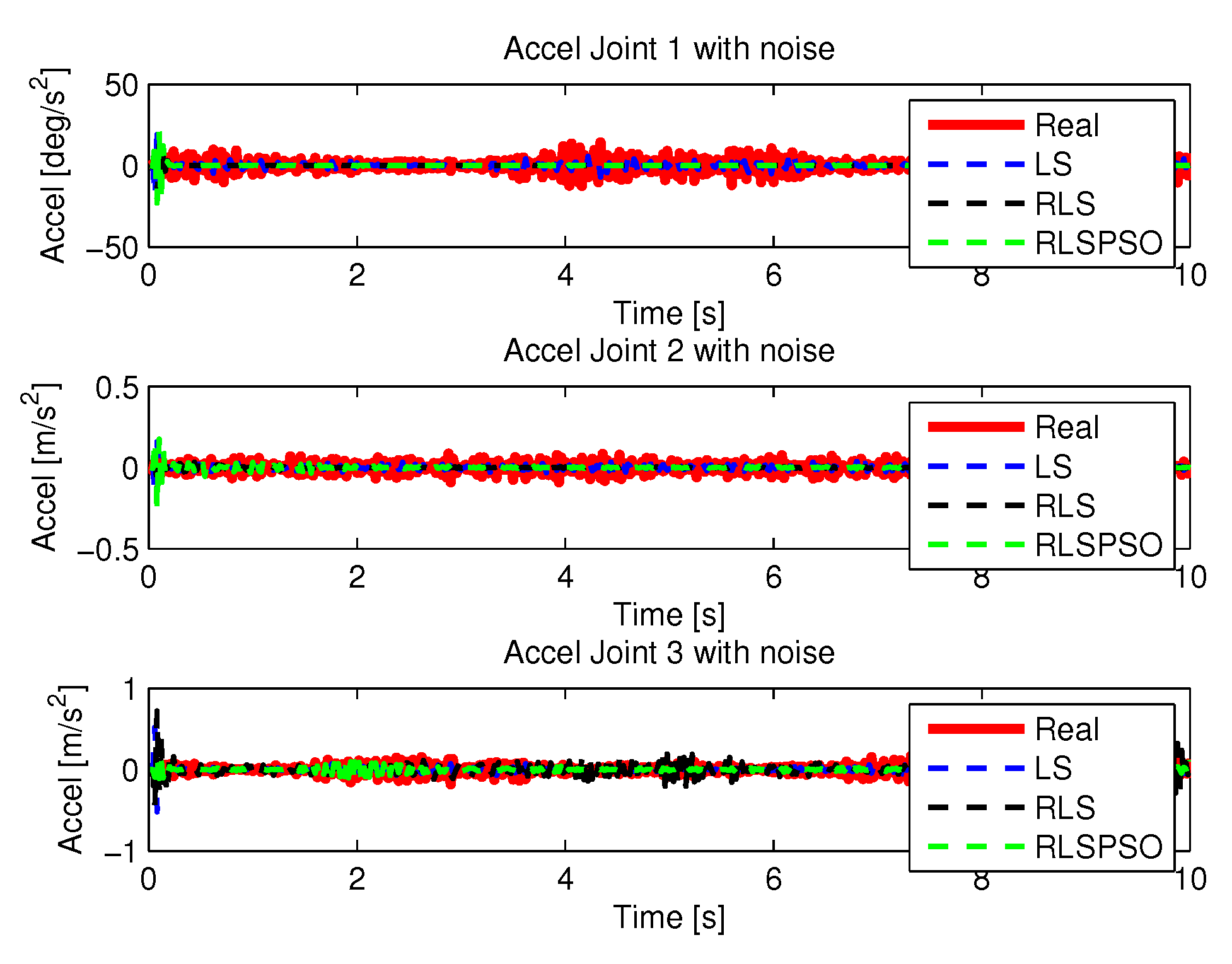
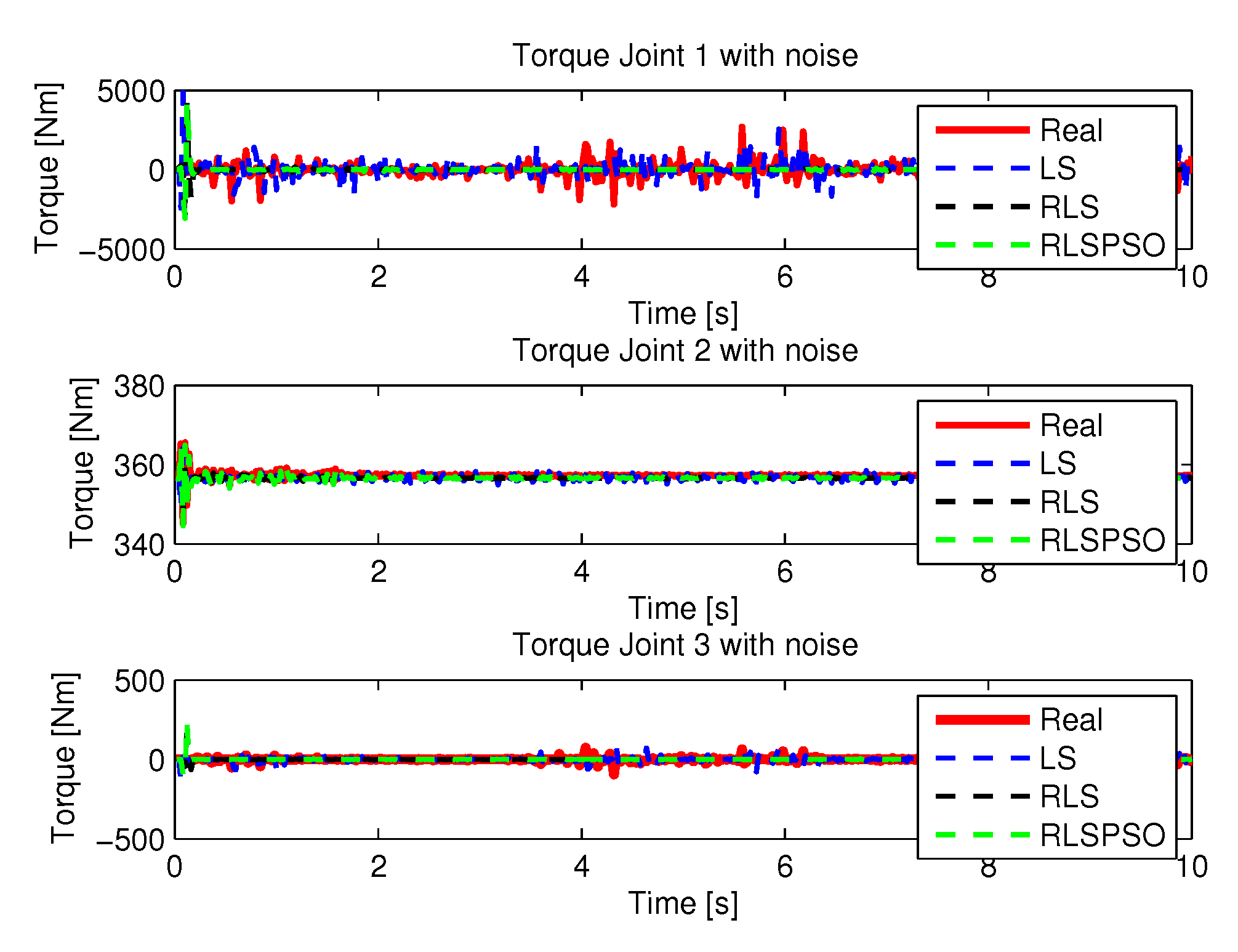
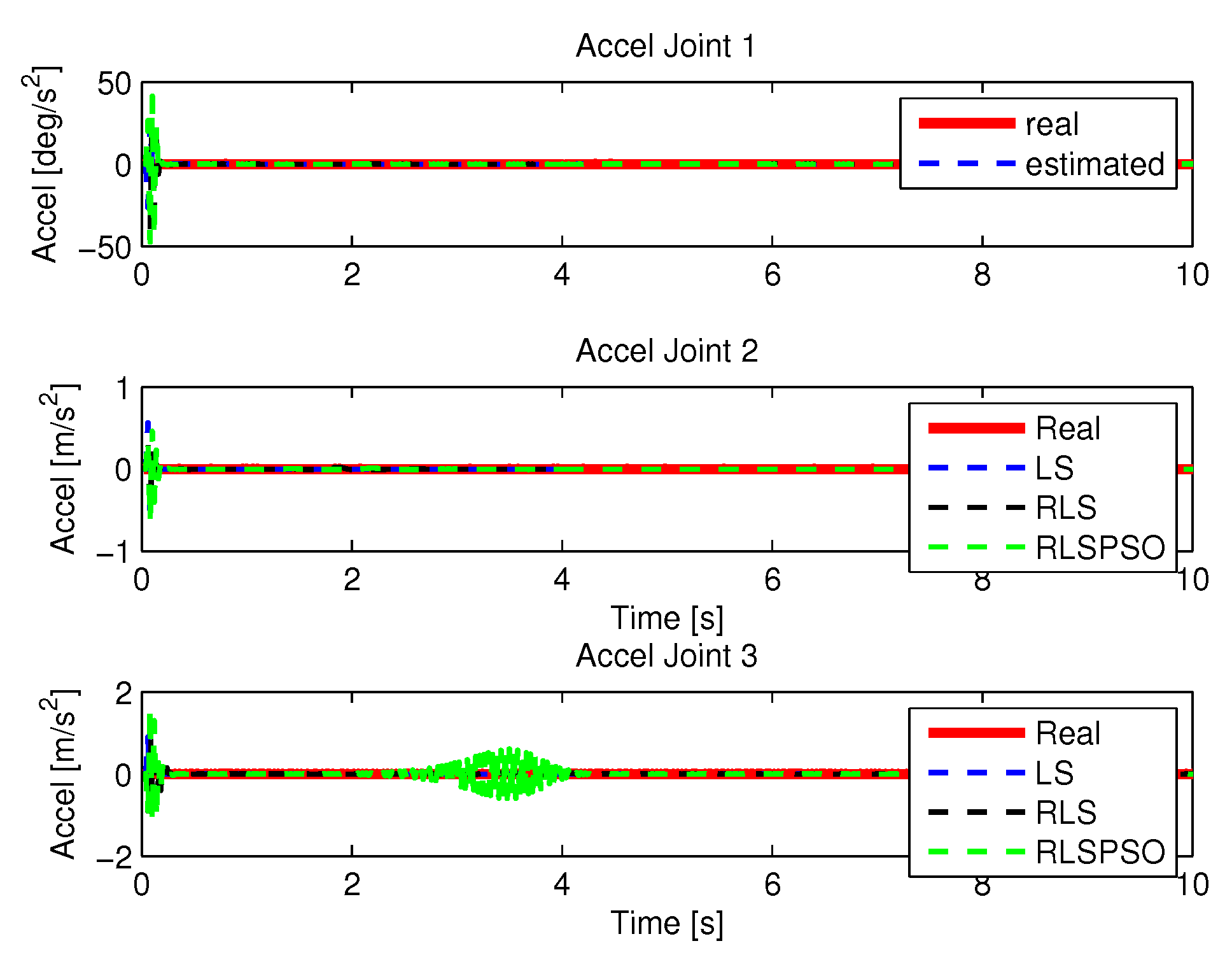
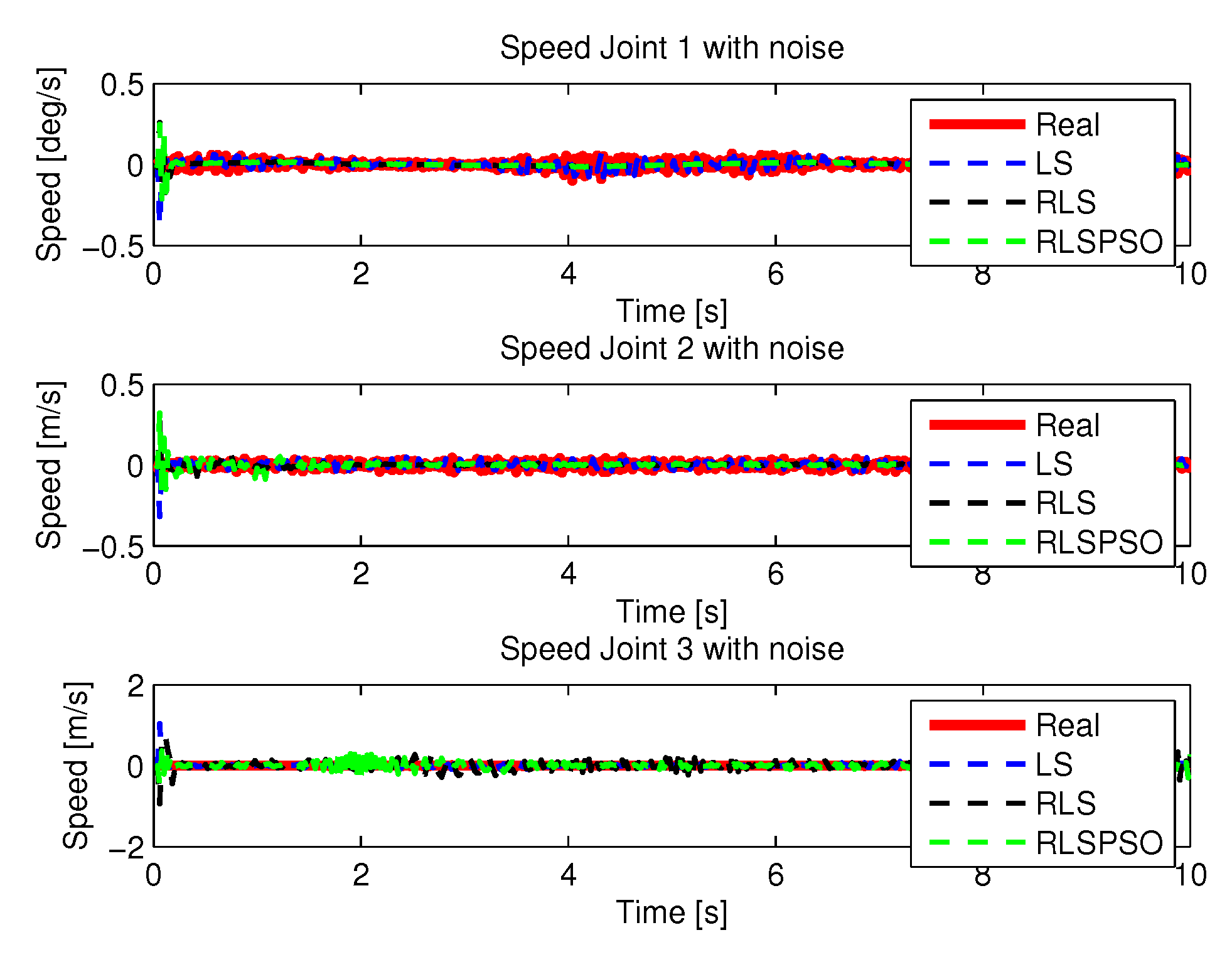
5.2. Results with Noise
5.2.1. LS with Noise
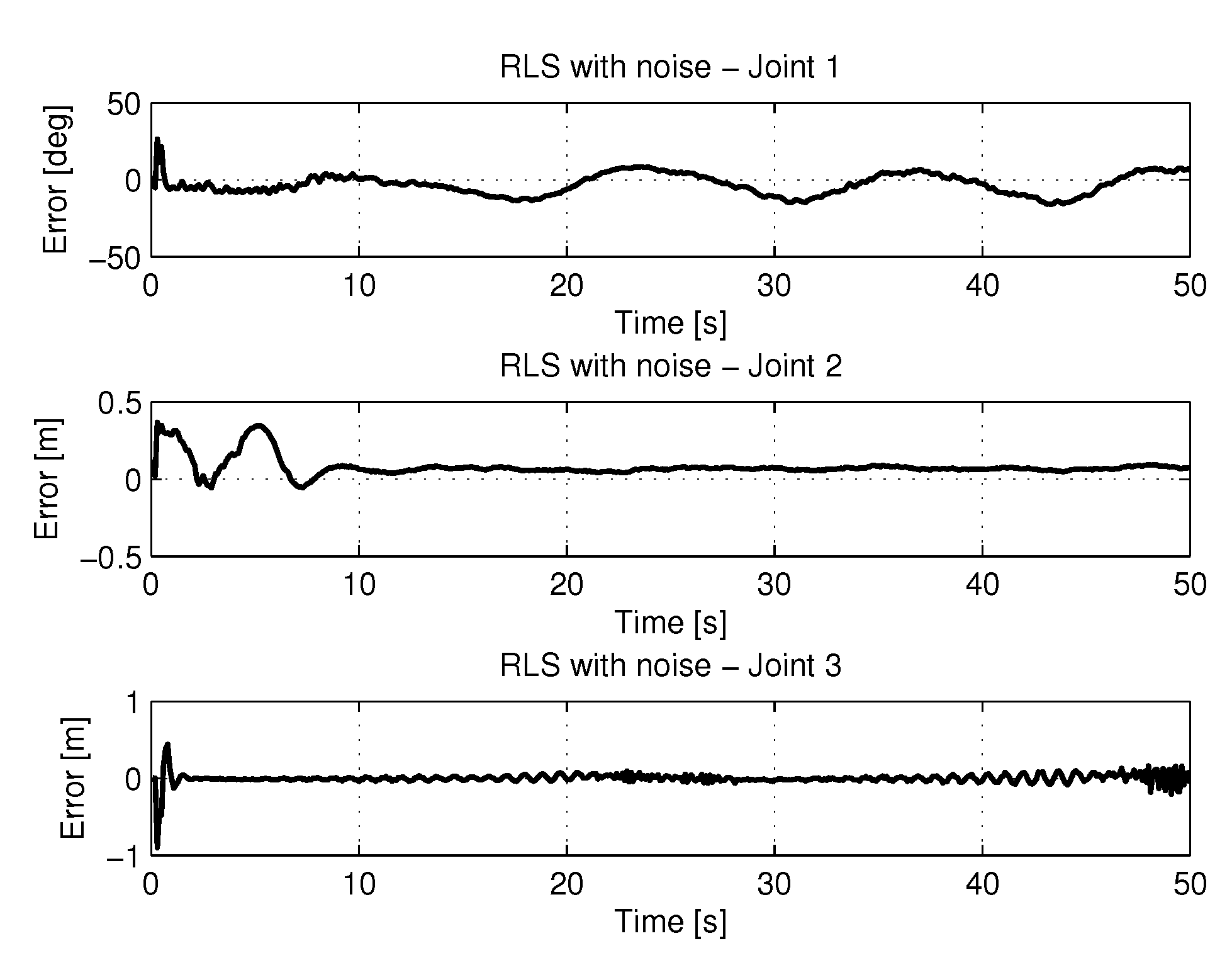
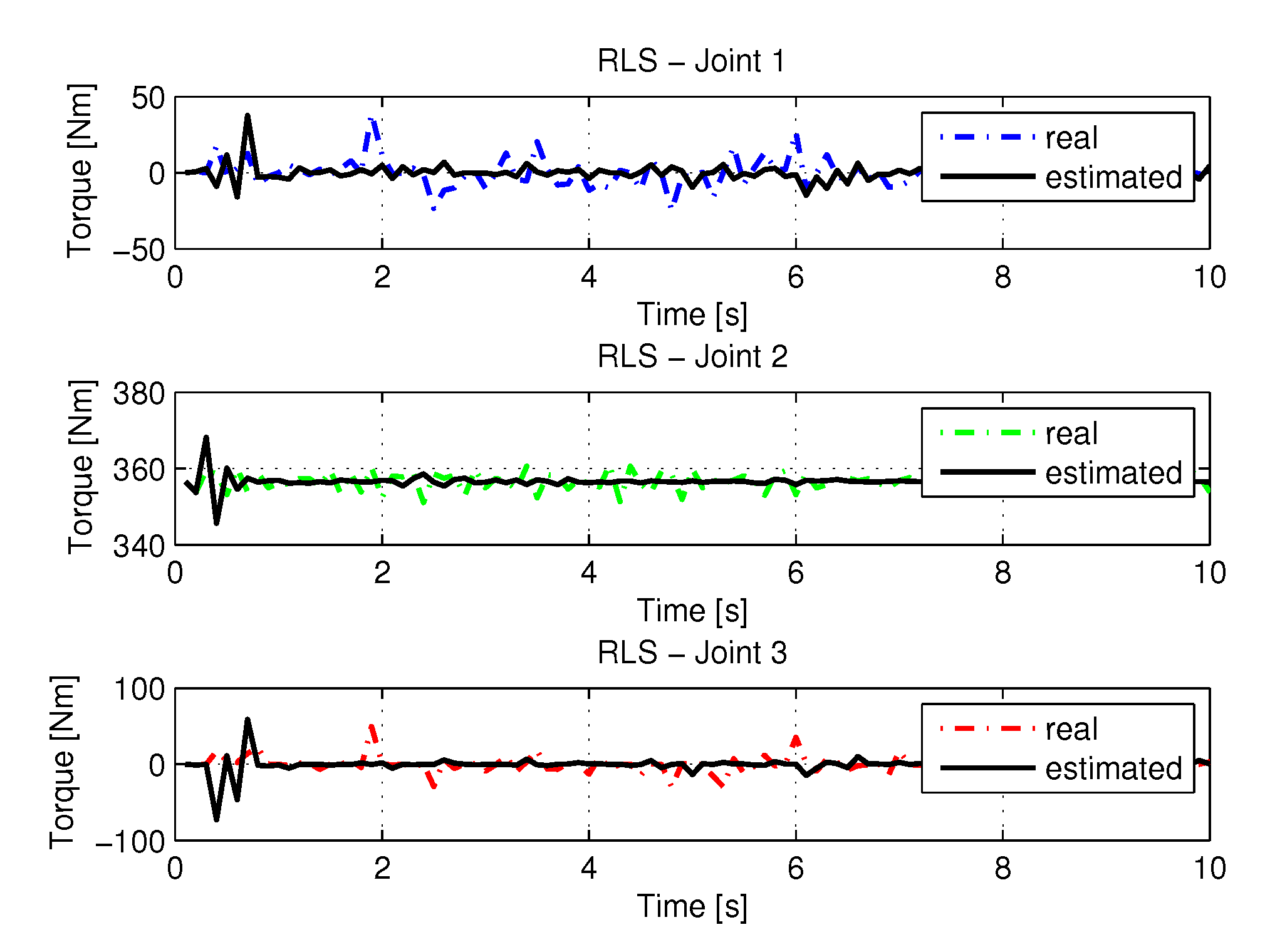
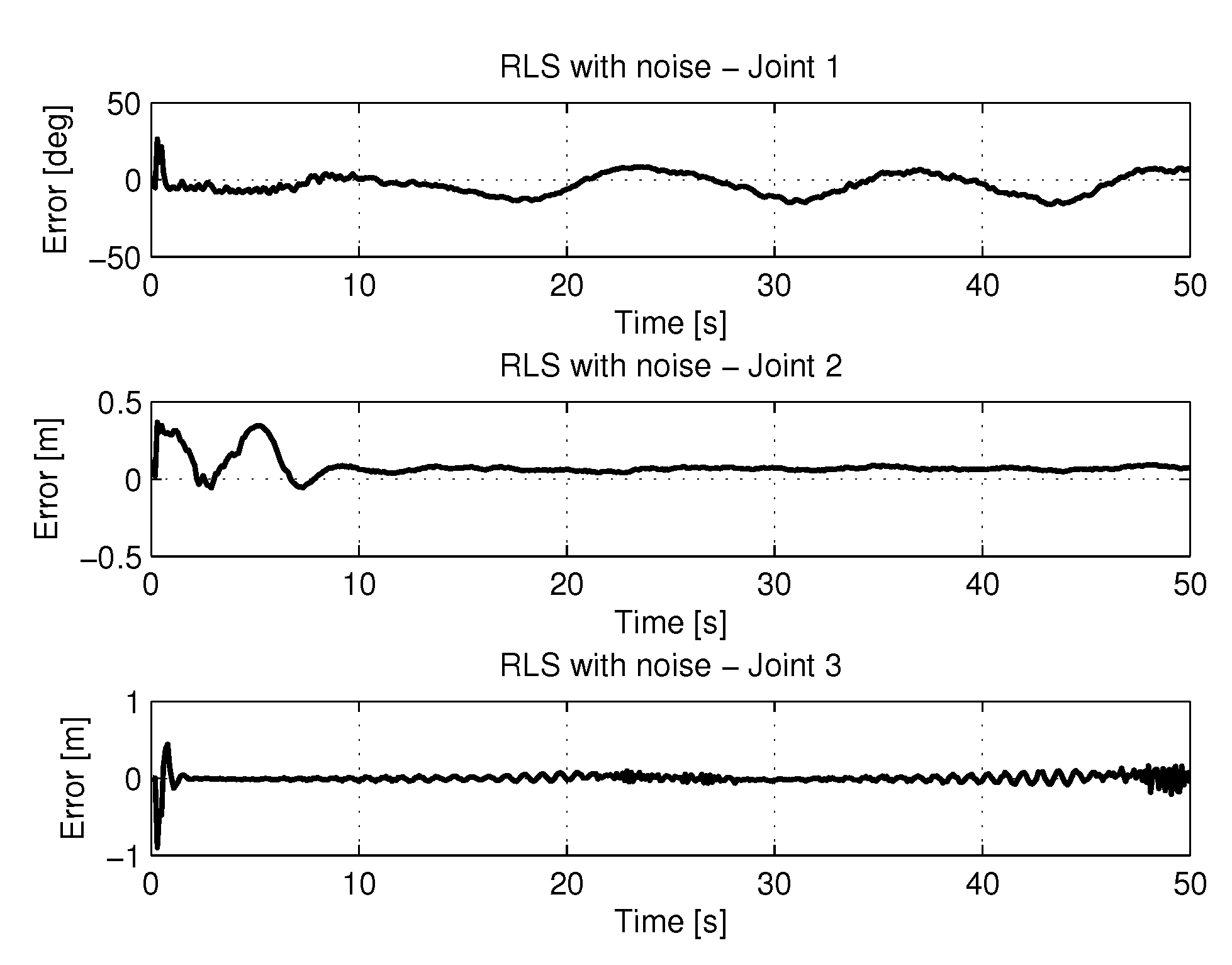
5.2.2. RLS with Noise
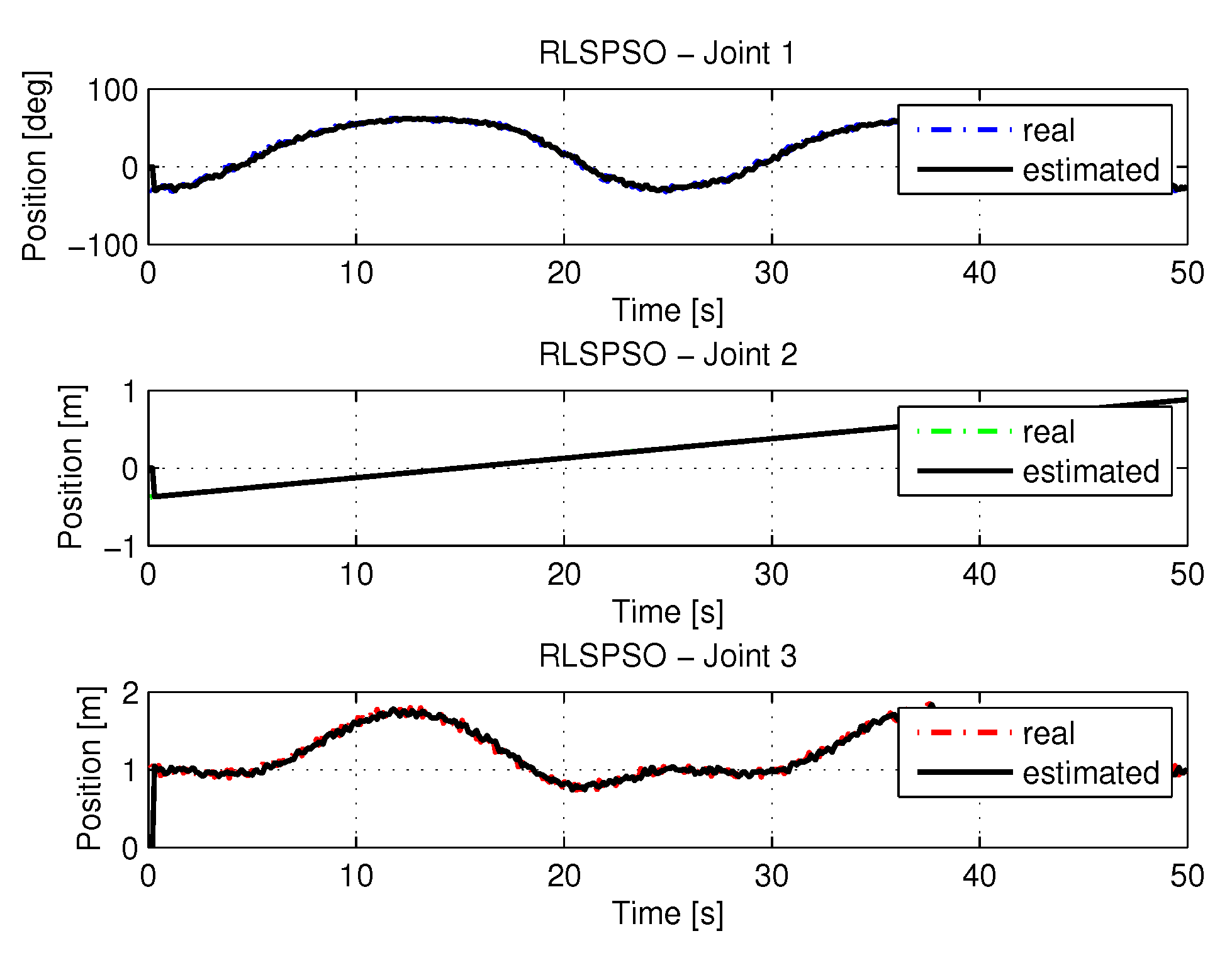
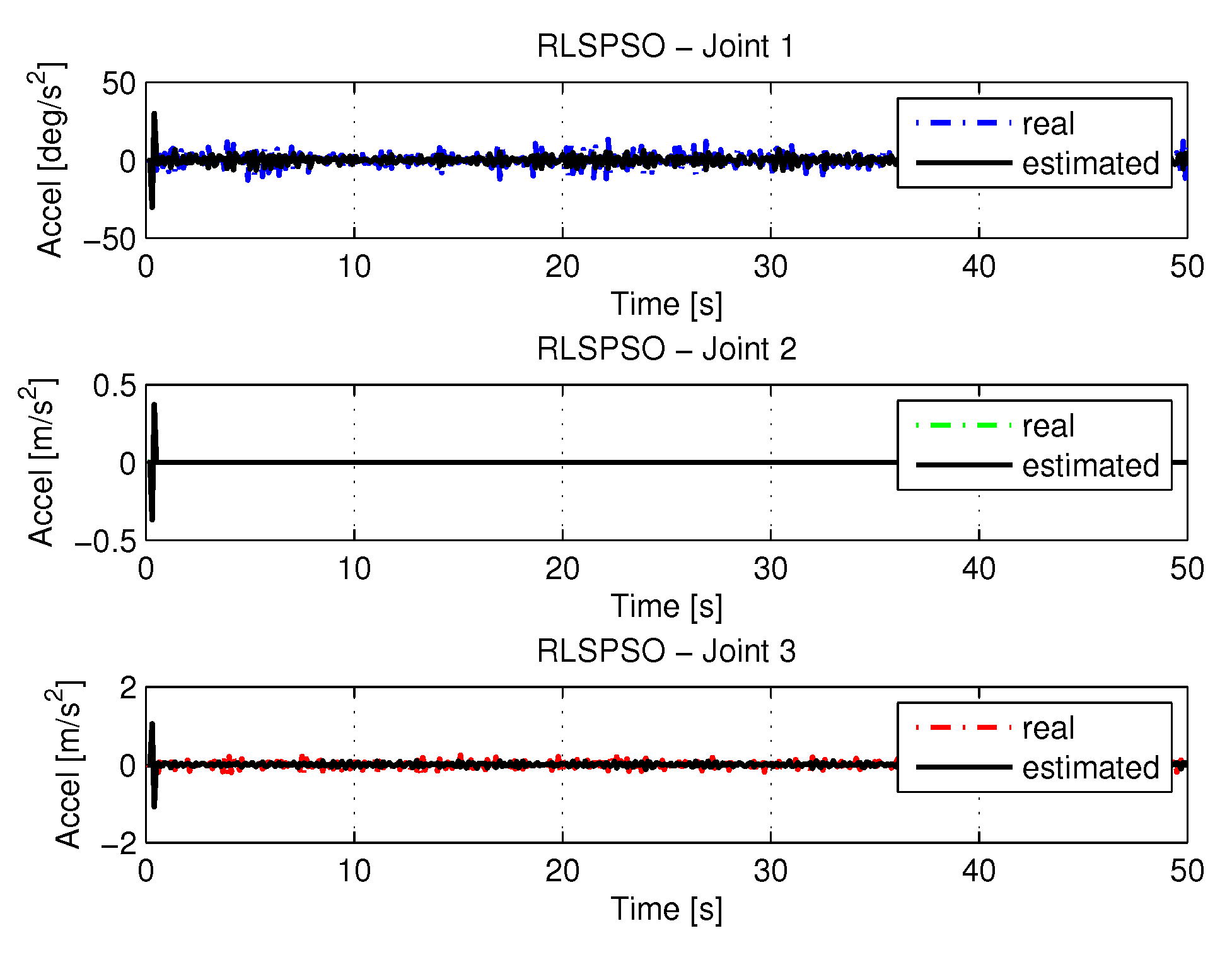
5.2.3. RLSPSO with Noise
5.3. Comparison of Algorithms
6. Discussion
More Method Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Dynamic Model of the Cylindrical Manipulator
Appendix A.1. Kinetic Energy
Appendix A.2. Potential Energy
Appendix A.3. Lagrange Equation
Appendix A.4. Dynamics of the Matrix form Manipulator
References
- Pinto, M.F.; Mendonça, T.R.; Olivi, L.R.; Costa, E.B.; Marcato, A.L. Modified approach using variable charges to solve inherent limitations of potential fields method. In Proceedings of the 2014 11th IEEE/IAS International Conference on Industry Applications, Juiz de Fora, Brazil, 7–10 December 2014. [Google Scholar]
- Vijaysai, P.; Gudi, R.D.; Lakshminarayanan, S. Identification on demand using a blockwise recursive partial least-squares technique. Ind. Eng. Chem. Res. 2003, 42, 540–554. [Google Scholar] [CrossRef]
- Hafezi, Z.; Mohammad, M.A. Recursive generalized extended least squares and RML algorithms for identification of bilinear systems with ARMA noise. ISA Trans. 2018, 88, 50–61. [Google Scholar] [CrossRef] [PubMed]
- Stojanovic, V.; Novak, N. Joint state and parameter robust estimation of stochastic nonlinear systems. Int. J. Robust Nonlinear Control 2016, 26, 3058–3074. [Google Scholar] [CrossRef]
- Stojanovic, V.; Novak, N. Identification of time-varying OE models in presence of non-Gaussian noise: Application to pneumatic servo drives. Int. J. Robust Nonlinear Control 2016, 26, 3974–3995. [Google Scholar] [CrossRef]
- Zhang, G.; Xianku, Z.; Hongshuai, P. Multi-innovation auto-constructed least squares identification for 4 DOF ship manoeuvring modelling with full-scale trial data. ISA Trans. 2015, 58, 186–195. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Zhao, L.; Han, Z.; Tang, Y. Identification of Wiener model using least squares support vector machine optimized by adaptive particle swarm optimization. J. Control Autom. Elect. Syst. 2015, 26, 609–615. [Google Scholar] [CrossRef]
- Zha, F.; Sheng, W.; Guo, W.; Qiu, S.; Deng, J.; Wang, X. Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO. Appl. Sci. 2019, 9, 324. [Google Scholar] [CrossRef] [Green Version]
- Mizuno, N.; Nguyen, C.H. Parameters identification of robot manipulator based on particle swarm optimization. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017. [Google Scholar]
- Guo, W.; Li, R.; Cao, C.; Gao, Y. Kinematics, dynamics, and control system of a new 5-degree-of-freedom hybrid robot manipulator. Adv. Mech. Eng. 2016, 8, 1687814016680309. [Google Scholar] [CrossRef] [Green Version]
- Tutsoy, O.; Duygun, E.B.; Sule, C. Learning to balance an NAO robot using reinforcement learning with symbolic inverse kinematic. Trans. Inst. Meas. Control 2017, 39, 1735–1748. [Google Scholar] [CrossRef]
- Tutsoy, O.; Calikusu, I.; Colak, S.; Vahid, O.; Barkana, D.E.; Gongor, F. Developing Linear and Nonlinear Models of ABB IRB120 Industrial Robot with MapleSim Multibody Modelling Software. Eurasia Proc. Sci. Technol. Eng. Math. 2017, 1, 273–285. [Google Scholar]
- Nazari, A.A.; Ali, S.A.M.; Ayyub, H. Kinematics analysis, dynamic modeling and verification of a CRRR 3-DOF spatial parallel robot. In Proceedings of the 2nd International Conference on Control, Instrumentation and Automation, Shiraz, Iran, 27–29 December 2011. [Google Scholar]
- Guo, X.; Lei, Z.; Kai, H. Dynamic parameter identification of robot manipulators based on the optimal excitation trajectory. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018. [Google Scholar]
- Yuan, J.J.; Wan, W.; Fu, X.; Wang, S.; Wang, N. A novel LLSDPso method for nonlinear dynamic parameter identification. Assem. Autom. 2017, 37, 490–498. [Google Scholar] [CrossRef]
- Urrea, C.; Pascal, J. Parameter identification methods for real redundant manipulators. J. Appl. Res. Technol. 2017, 15, 320–331. [Google Scholar] [CrossRef]
- Yan, D.; Lu, Y.; Levy, D. Parameter identification of robot manipulators: A heuristic particle swarm search approach. PLoS ONE 2015, 10, e0129157. [Google Scholar] [CrossRef] [PubMed]
- Edge, Solid Software; Siemens Global Website; Siemens PLM Software: Stuttgart, Germany, 2019.
- Sanz, P. Robotics: Modeling, planning, and control (siciliano, b. et al; 2009) [on the shelf]. IEEE Robot. Autom. Mag. 2009, 16, 101. [Google Scholar] [CrossRef]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; Wiley: New York, NY, USA, 2006. [Google Scholar]
- Hartenberg, R.; Danavi, J. Kinematic Synthesis of Linkages; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Spong, M.W.; Mathukumalli, V. Robot Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Potkonjak, V. Dynamics of Manipulation Robots: Theory and Application; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Kozlowski, K.R. Modelling and Identification in Robotics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Coelho, A.A.R.; Santos, L.C. Identificação de sistemas dinâmicos lineares; Editora UFSC: Santa Catarina, Brazil, 2004. [Google Scholar]
- Ljung, L.; Soderstom, T. Theory and Practice of Recursive Identification; MIT Press: Cambridge, MA, USA, 1983. [Google Scholar]
- Kjaer, A.P.; Heath, W.P.; Wellstead, P.E. Identification of cross-directional behaviour in web production: Techniques and experience. Control Eng. Pract. 1995, 3, 21–29. [Google Scholar] [CrossRef]
- Aguirre, L.A. Introdução à Identificação de Sistemas—Técnicas lineares e não-lineares aplicadas a sistemas reai; Editora UFMG, 3a: Belo Horizonte, Brazil, 2007. [Google Scholar]
- Viola, J.; Angel, L. Tracking control for robotic manipulators using fractional order controllers with computed torque control. IEEE Latin Am. Trans. 2018, 16, 1884–1891. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User Pers; Tsinghua University Press and Prentice: Beijing, China, 2002. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory, Micro Machine and Human Science. In Proceedings of the MHS’95—Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Paiva, F.A.P.; Costa, J.A.F.; Silva, C.R.M. A Serendipity-Based Approach to Enhance Particle Swarm Optimization Using Scout Particles. IEEE Latin Am. Trans. 2017, 15, 1101–1112. [Google Scholar] [CrossRef]
- Engelbrecht, A.P. Computational Intelligence: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Mineo, C.; Pierce, S.G.; Nicholson, P.I.; Cooper, I. Robotic path planning for non-destructive testing—A custom MATLAB toolbox approach. Robot. Comput.-Integr. Manuf. 2016, 37, 1–12. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | m (kg) | l (m) |
|---|---|---|
| 1 () | 36.367405 | 0.050 |
| 2 () | 12.632222 | 0.790 |
| 3 () | 23.735183 | 0.900 |
| Link | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0.245 | |
| 2 | 0.11 | 0 | ||
| 3 | 0 | 0 | 0 |
| Method | Comp. Cost (s) | |||
|---|---|---|---|---|
| LS | 0.8873 | 0.7858 | 0.6829 | 2.565149 |
| RLS | 0.7946 | 0.7652 | 0.8408 | 65.039719 |
| RLSPSO | 0.8016 | 0.8017 | 0.8510 | 37.585912 |
| Method | Comp. Cost (s) | |||
|---|---|---|---|---|
| LS | 0.8129 | 0.7275 | 0.6129 | 2.851231 |
| RLS | 0.7321 | 0.7118 | 0.8012 | 73.989122 |
| RLSPSO | 0.7971 | 0.7912 | 0.8221 | 69.969319 |
| Method | |||
|---|---|---|---|
| LS | 1 | ||
| RLS | 1 | ||
| RLSPSO | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Batista, J.; Souza, D.; dos Reis, L.; Barbosa, A.; Araújo, R. Dynamic Model and Inverse Kinematic Identification of a 3-DOF Manipulator Using RLSPSO. Sensors 2020, 20, 416. https://doi.org/10.3390/s20020416
Batista J, Souza D, dos Reis L, Barbosa A, Araújo R. Dynamic Model and Inverse Kinematic Identification of a 3-DOF Manipulator Using RLSPSO. Sensors. 2020; 20(2):416. https://doi.org/10.3390/s20020416
Chicago/Turabian StyleBatista, Josias, Darielson Souza, Laurinda dos Reis, Antônio Barbosa, and Rui Araújo. 2020. "Dynamic Model and Inverse Kinematic Identification of a 3-DOF Manipulator Using RLSPSO" Sensors 20, no. 2: 416. https://doi.org/10.3390/s20020416
APA StyleBatista, J., Souza, D., dos Reis, L., Barbosa, A., & Araújo, R. (2020). Dynamic Model and Inverse Kinematic Identification of a 3-DOF Manipulator Using RLSPSO. Sensors, 20(2), 416. https://doi.org/10.3390/s20020416