In this section, we validate the efficiency and validity of the proposed method via extensive experiments on simulated and real interferograms. Experiments consist of three parts. First of all, we demonstrate the estimation accuracy of noise level on simulated noisy interferograms. It is the crux of the proposed method. Then, the simulated experiments are conducted. As a promotion of NSST filter, the developed method is compared with five state of the art single-baseline filters, including: Goldstein method, local frequency estimate (LFE) algorithm, optimal integration-based adaptive direction filter (OADF), iterative NL-InSAR and InSAR-BM3D. Finally, the proposed method on real interferograms will be tested. For simplicity, the proposed method is termed as NSST in the following sections.The parameters of various filters are set as
3.1. Noise Estimation Experiments
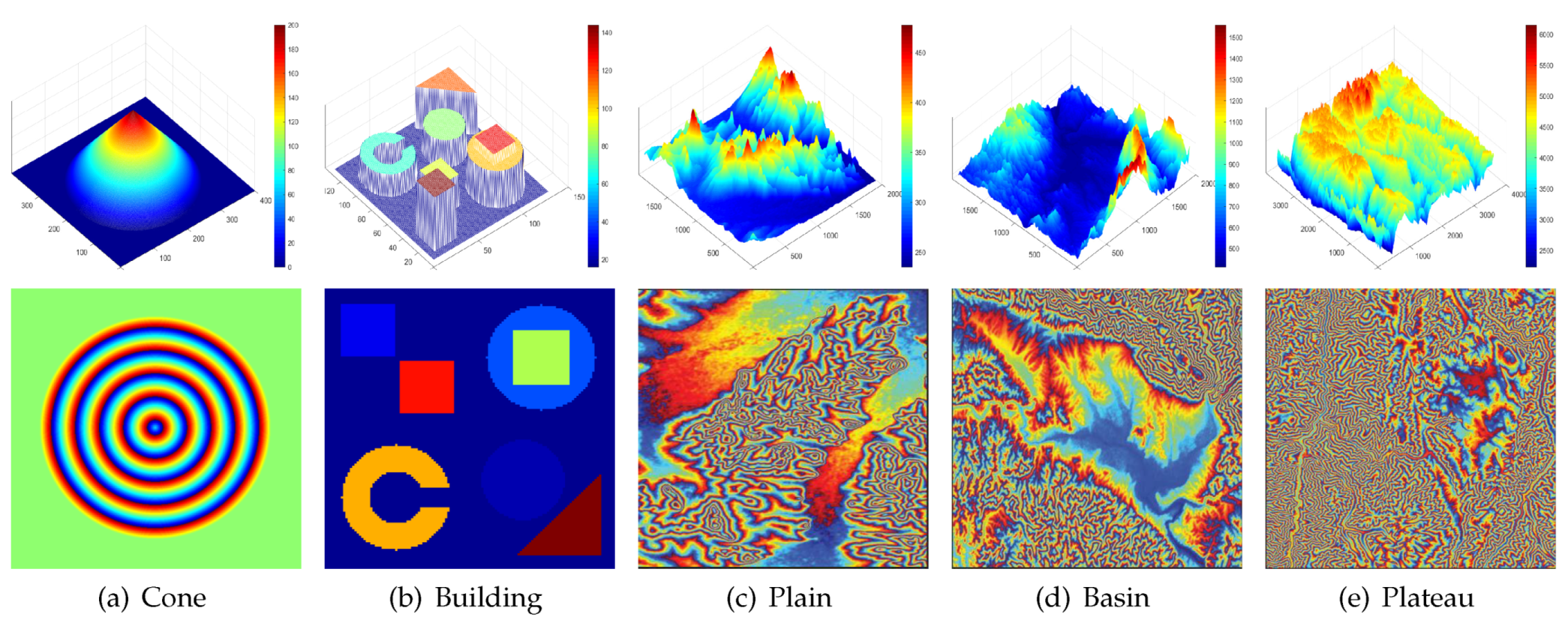
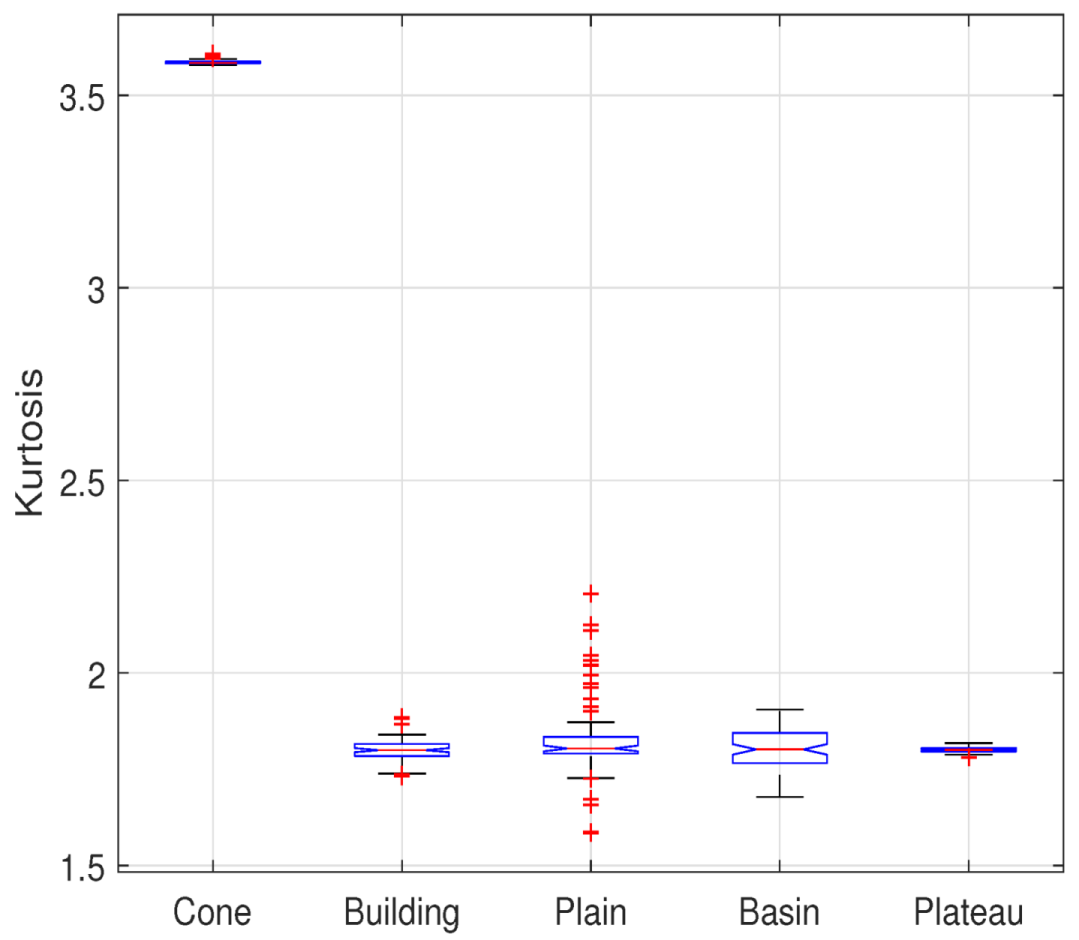
The key of the proposed method is noise variance estimation. In this section, we verify the accuracy of the estimated noise variance on simulated data. The original elevation model is a cone, as shown in
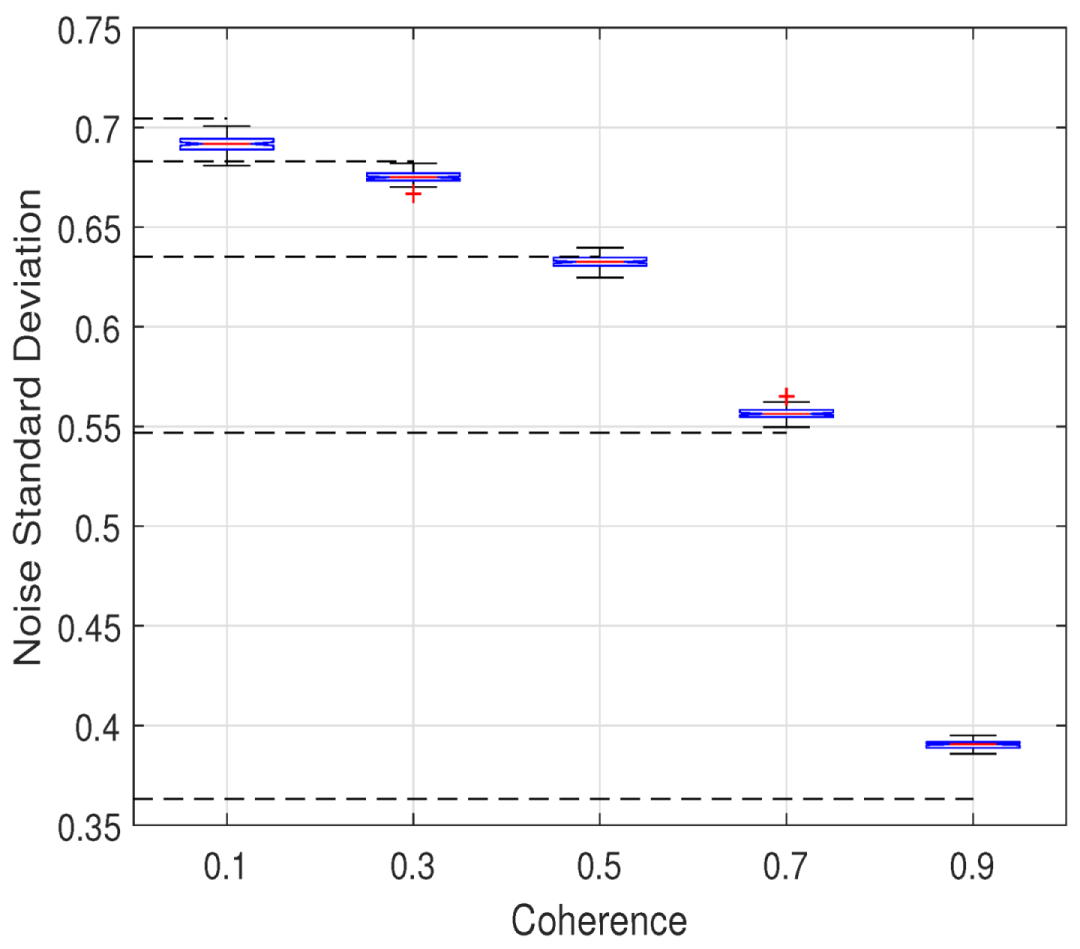
Figure 4a. As noted before, the interferometric phase accords with the additive noise model in complex domain, the real part and the imaginary part are denoised respectively. We generate three clean interferograms with different baseline. Noisy interferograms are disturbed by the circular complex standard Gaussian noise. The coherence of noisy interferograms is set to 0.1, 0.3, 0.5, 0.7, 0.9, respectively. The true noise variance of the real part, for example, is calculated numerically. Compared with the true value, the estimated noise variance is generated by the proposed method. In order to further test the robustness of the proposed method, 100 Mont-Calo simulations are conducted. Statistics of its results are shown in
Figure 6, where the black dotted line is the mean of true value in 100 experiments.
The comparison between the estimation and the mean implies the accuracy and stability of the proposed method. The maximum error rate is calculated to evaluate the estimation accuracy and is defined as
where
denotes the estimated value in 100 experiments,
indicates the mean of true value. The result is shown in
Table 3. It is obvious that some errors exist in the estimation. The higher the coherence is, the larger the SNR is. In the case of low coherence, the significant noise level engenders the confusion of the high-frequency information and the noise, which results in a slight overestimation. On the contrary, the noise near fringe in interferograms is mistaken for significant pixels owing to its weak effect to fringes in the case of high coherence. So the estimation is lower than the true value. We must emphasize that the maximum error rate is controlled within
. The underestimation is compensated by the excellent performance of Wiener filter.
3.2. Simulated Experiments
In this section, we simulate three interferograms of cone and mountain to assess the performance of the proposed method. The noise environment comprises two situations: constant and variable noise variance in spatial domain. It is necessary for comparative experiments within each section. The experiments in interferograms with unitary noise variance are conducted to inspect the reconstructed performance for phase jump and phase gradient mutation. We select interferograms with
pixels, which are generated by cone and contain both phase jump and phase gradient mutation. Its clean interferograms and noisy interferograms can be shown in
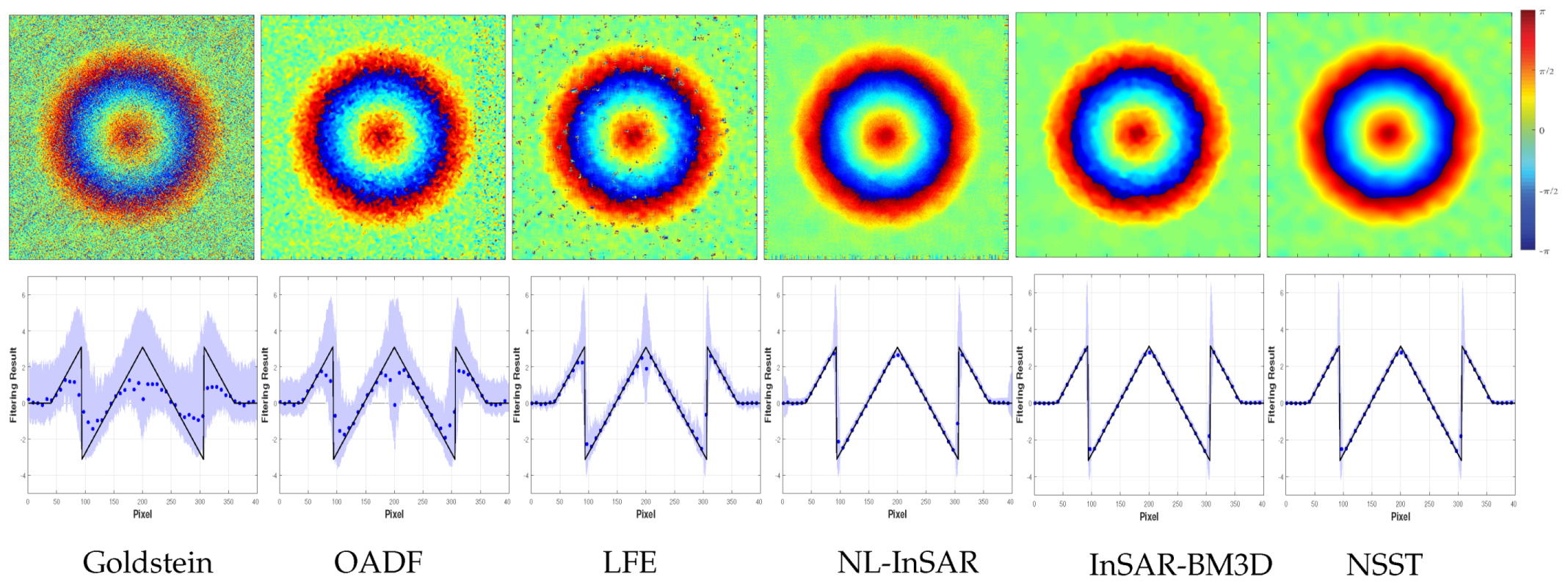
Figure 7. Coherence is set to 0.5. The block operation is omitted because of the constant noise variance. The comparable results of the interferogram with the shortest baseline are shown in the first row of
Figure 8.
Intuitively, the result of the Goldstein method is incorrect. There are obvious errors in OADF and LFE. NL-InSAR, InSAR-BM3D and the proposed method all obtain appreciable results. The mean square error (MSE) between the clean interferogram and the filtered interferogram confirms above statements. What is more,
Table 4 lists the number of residues in the filtered interferogram and the computation time. Note that the bold font indicates the best performance in the table.
Table 4 exhibits that the proposed method outperforms to others with a running time that is second only to Goldstein method. The similar MSE are found in InSAR-BM3D but its computation time is about twice as long as our method. The results in NL-InSAR is superior to Goldstein method, OADF, LFE but its operation efficiency is the worst due to iterative operation. By and large, a combination of minimum MSE, minimum number of residues and high efficiency has taken in our method.
The second row of
Figure 8 displays the mean and standard deviation of 100 Monte Carlo experiments at the central row of results. Thereinto, the black solid line is the true value. The blue dotted line denotes the mean of 100 experiments. The pale blue shadow is the range of three times standard deviation near the mean. The poorest result in Goldstein method is interrelated with fixed
and its boundedness to lower SNR. The result of NL-InSAR, InSAR-BM3D and our method for the stationary phase is close to unbiased estimation, while other methods emerge distinct deviation. The basic idea of OADF and LFE is the estimation to local direction and frequency of interferometric phase. So the invalid estimation has contributed to a heavy fluctuation near phase jump and phase gradient mutation. NL-InSAR produces excellent performance in phase jump but its non-local mean operation induces the outlier which can be observed on both sides. Nevertheless, it produces excellent performance in phase jump. Generally, InSAR-BM3D and our method outperform other methods but our method has higher operation efficiency.
Considering a more complex noise level model in the second experiment, in which the coherence ranges from 0.1 to 0.9 and increases from left to right at regular intervals.
Figure 9 shows clean interferograms and noisy interferograms with the size of
. The image is divided into 9 non-overlapping patches in noise variance estimation procedure. The size of each patch is
.
In this part, a new evaluation index, which is expressed as the pixel-wise Gradient Magnitude Similarity (GMS) [
34,
35] between the reference and filtered images, is adhibited to evaluate the filtering results of various methods. Gradient magnitude is an apparent indication of the difference between adjacent pixels. The gradient of interferometric phase consists of two parts: the gradient of the local stationary phase reflects the local slope of topography and the similarity of gradient casts light upon the similarity of local topography. In addition, the outlier implies phase discontinuity within a phase period. Similar to the well-known Structure SIMilarity (SSIM) index, the gradient similarity of phase jump can also reflect the edge-preserving ability of methods. Therefore, it is worth to use GMS as a new evaluation index. GMS is defined as
where
is set to 0.0026 to ensure numerical stability.
and
indicate the gradient magnitudes of
o and
f. The gradient magnitudes is derived from (
31) and (
32).
where
o and
f indicate the original images and filtered images respectively.
and
indicate the Prewitt filter along the horizontal and vertical direction. They are derived from (
33).
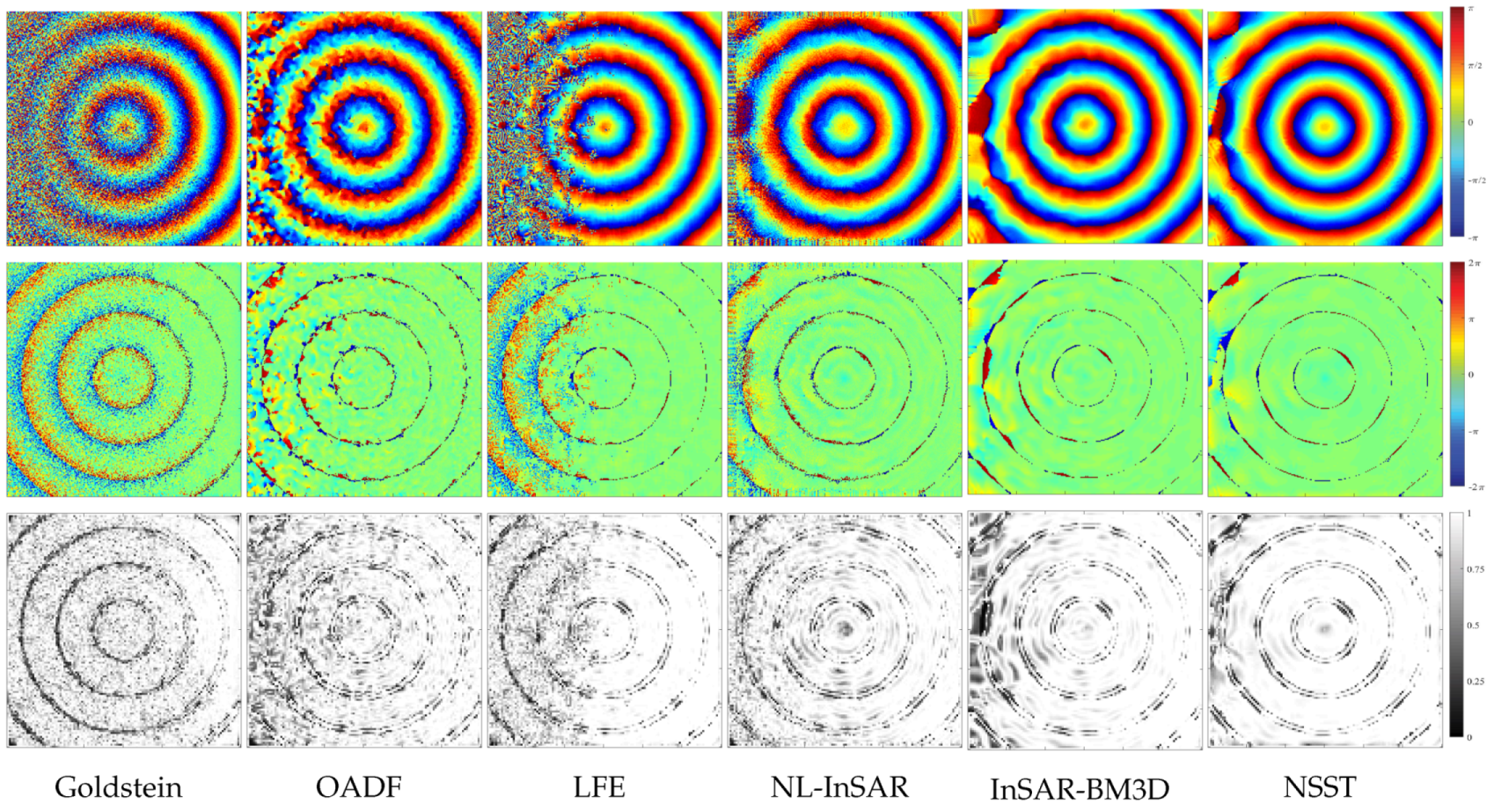
It should be noted that the larger the GMS value is, the higher the quality of the restored image is. When , the reference image is fully recovered. The mean of GMS map (GMSM) refers to the overall performance of GMS map.
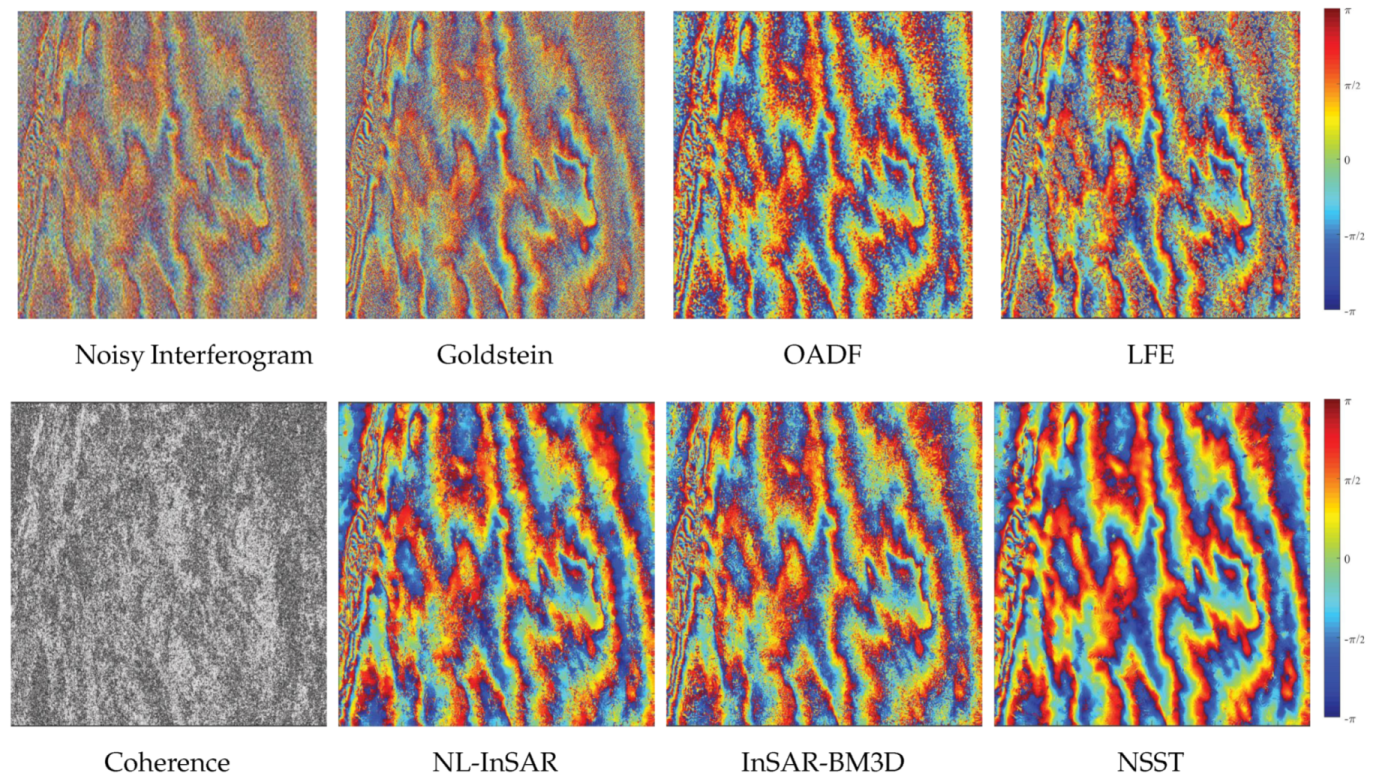
Figure 10 shows the filtering results, residual graph and GMS map corresponding to six different filters. Results show that all methods can correctly restore the original phase in the high-coherence region. However, only InSAR-BM3D and the proposed method get considerable results in the low coherence region. Besides, as far as the GMS map is concerned, our method has better ability to maintain the phase gradient, especially in the low-coherence region. The estimated phase of the proposed method tends to be more stationary and closes to the original phase.
Table 5 shows the MSE, GMSM and computation time. Note that the bold font indicates the best performance in the table. The performance of various methods can be expressed as (where > denotes better performance):
MSE: NSST>InSAR-BM3D>NL-InSAR>OADF>LFE>Goldstein
GMSM: NSST>InSAR-BM3D>NL-InSAR≥LFE>OADF>Goldstein
Computation efficiency: Goldstein>NSST>InSAR-BM3D>OADF>LFE>NL-InSAR
As a whole, our method is superior to other methods.
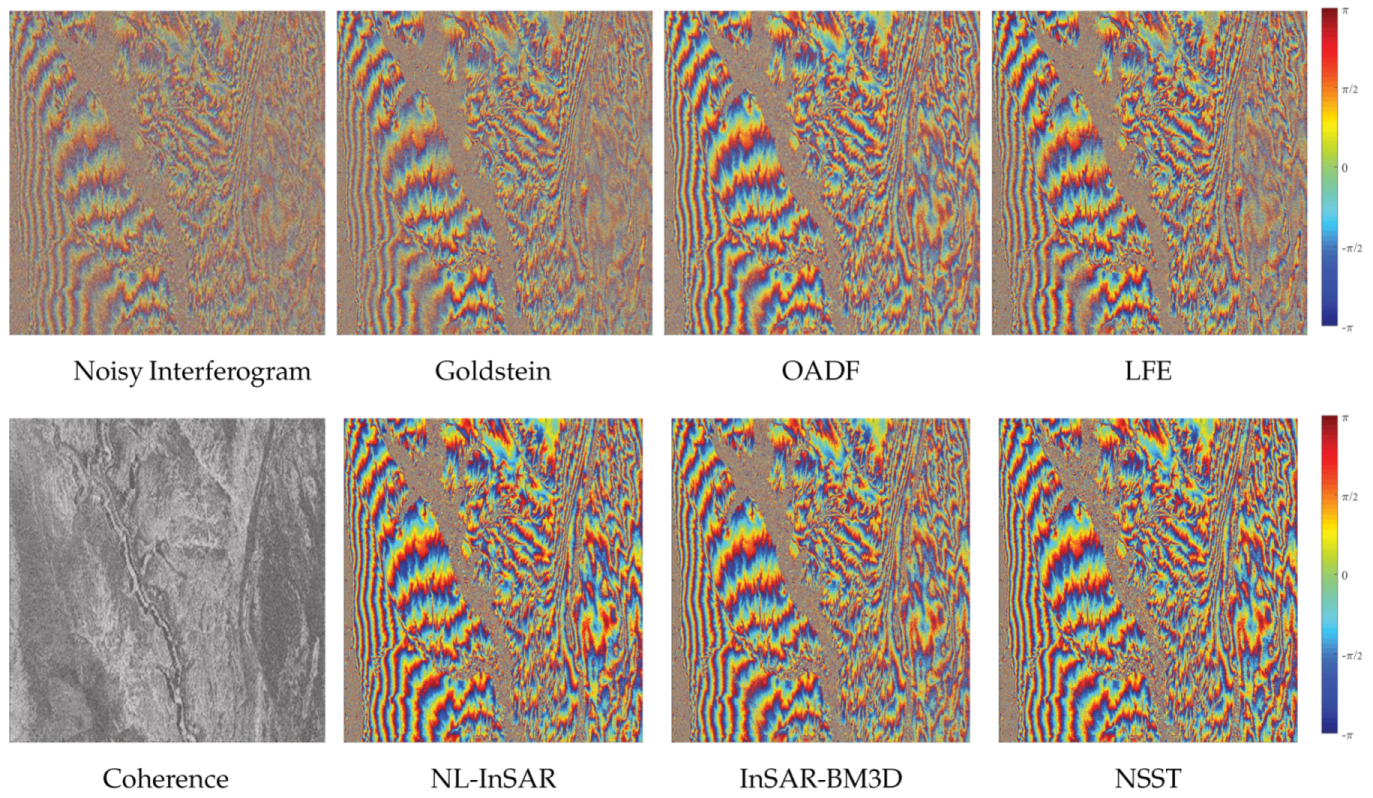
We consider a more complex topography to test the performance of various methods. The elevation data of a steep mountain in Shaanxi Province, China is selected to generate three interferograms. Coherence is consistent with last experiment. The size of interferograms is
. The image is divided into 25 non-overlapping patches in noise variance estimation procedure. The size of each patch is
. Interferograms involve dense and sparse fringes. Dense fringes are mostly located in the region with low coherence, which can better verify the effectiveness of the proposed method.
Figure 11 shows clean interferograms and noisy interferograms.
Figure 12 shows the filtered results.
Table 6 shows the results are similar to the results of the previous experiment. Note that the bold font indicates the best performance in the table. The proposed method produces minimum MSE and maximum GMSM, which prove the prominent filtering performance of it. The minimum MSE of the proposed method proves that the result of the proposed method is closer to the true interferometric phase. And the maximum GMSM implies that the result of the proposed method has fewer outliers and better local stability. The number of residues of the proposed method is second only to InSAR-BM3D and is very close to InSAR-BM3D. The reduction of residues is up to
compared with the residues of noisy image. Moreover, the computation time of the proposed method is half of the time of InSAR-BM3D. In general, the proposed method not only has outstanding filtering performance but also has high operation efficiency.
3.3. Experiments on Real Interferograms
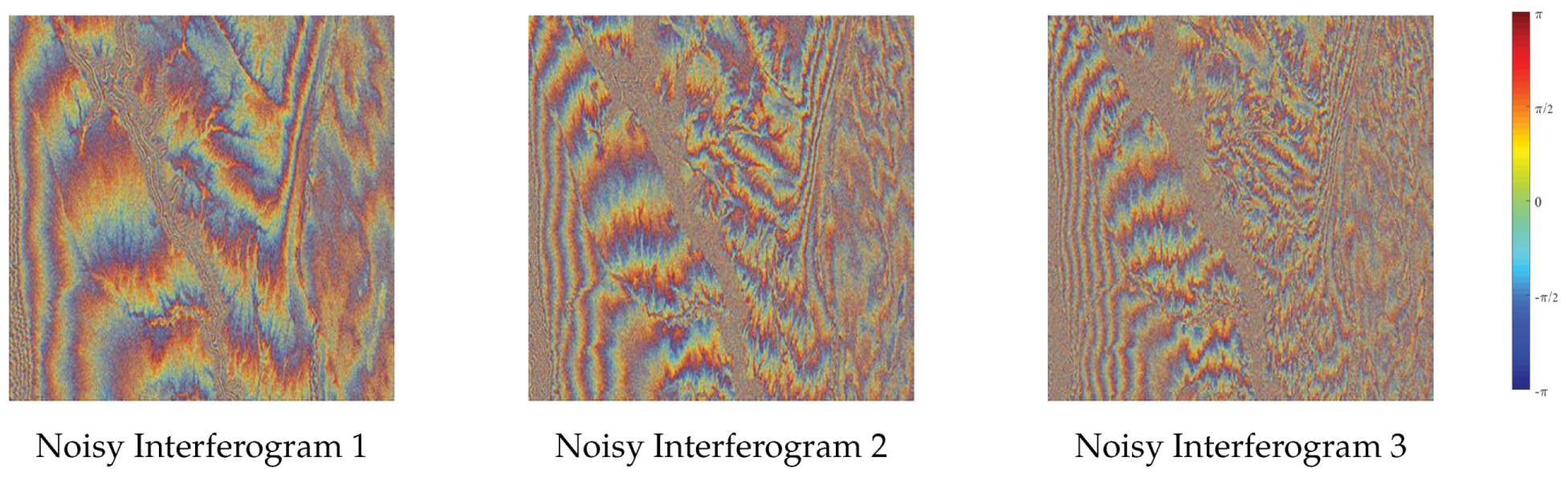
The original data set is three repeat-orbit InSAR data at Colorado Grand Canyon, USA, which is obtained by Alos-1 satellite.
Figure 13 shows its interferograms. Baselines are 738.182, 1241.066 and 1827.02 m, respectively. The size of interferograms is
. In noise variance estimation procedure, each interferogram is divided into 225 non-overlapping patches whose size is
.
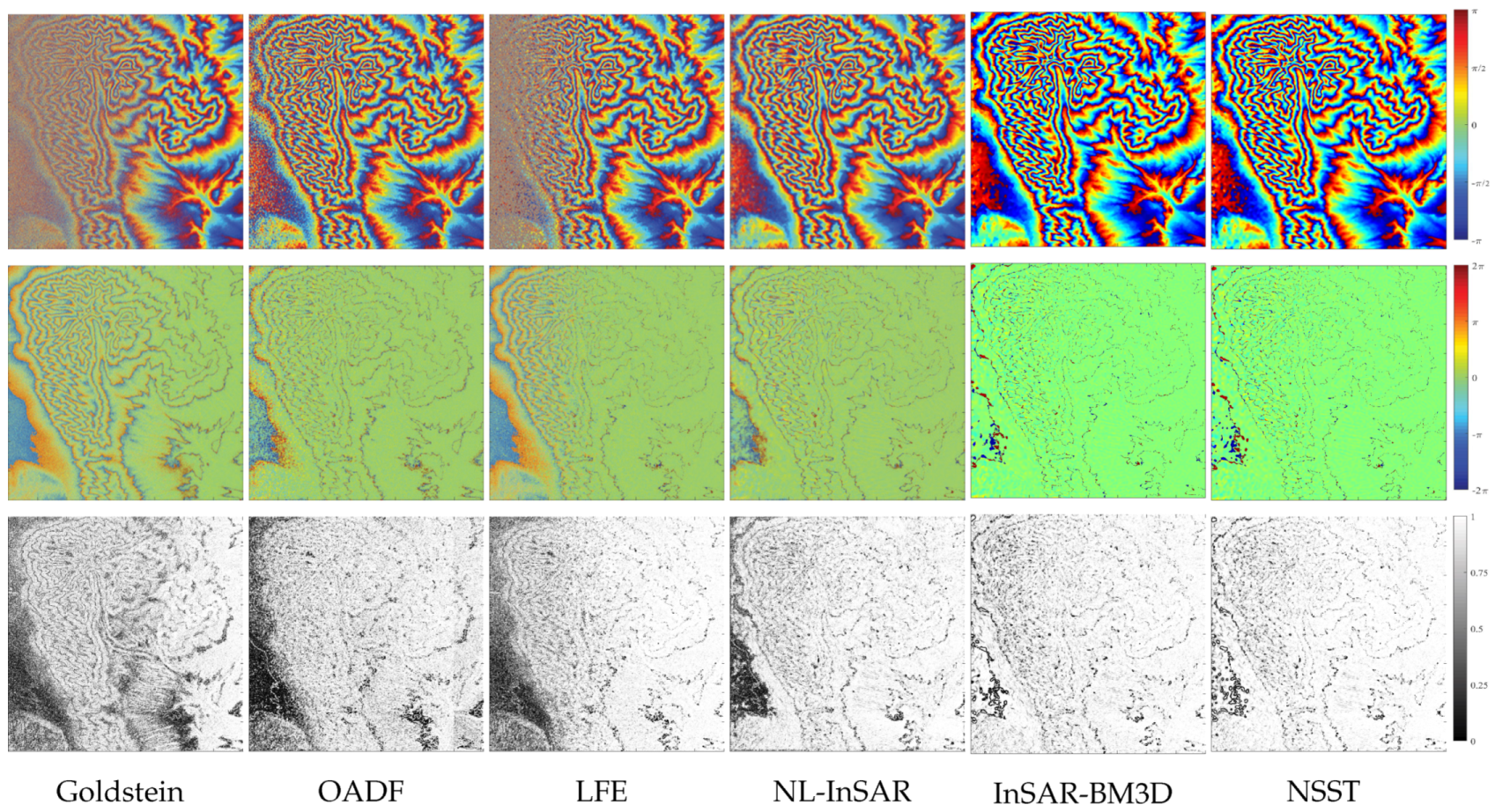
Results are shown in
Figure 14. Intuitively, the Goldstein method has completely failed. And the apparent noise remains in the result of OADF and LFE. The excellent results of NL-InSAR, InSAR-BM3D and the proposed method are similar.
In order to further compare various methods, the low-coherence region in the upper right corner (row: 1:1000, column: 4910:5910) is cropped to further analysis.
Figure 15 presents denoising results of different methods.
Table 7 lists the number of residues, the reduction rate of resides and computation time. Note that the bold font indicates the best performance in the table. The excellent performance of the proposed method can be confirmed directly by visual observation. In the proposed method, the reduction rate of residues (up to
) is remarkable and the result is more conducive for the subsequent phase unwrapping.
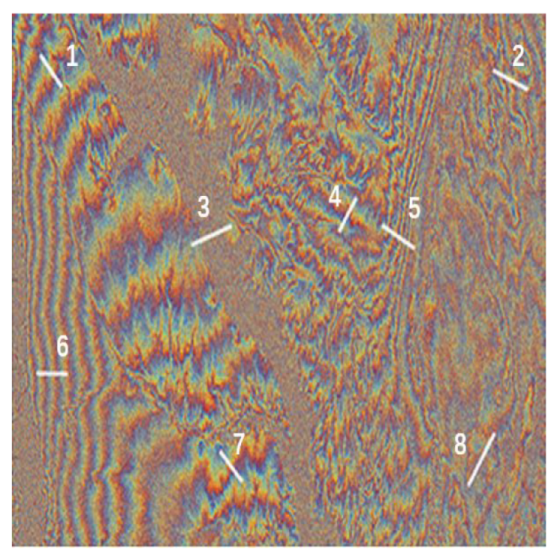
Eight phase profiles along the phase gradient direction, which involve intact phase period and satisfy local stationarity, are extracted for contrast. White lines in
Figure 16 represent the phase profile at low-coherence region (line 2 and line 8), high-coherence region (line 1 and line 6), complex topography region (line 3), the region corresponding to steep topography (line 5), and so forth. As shown in
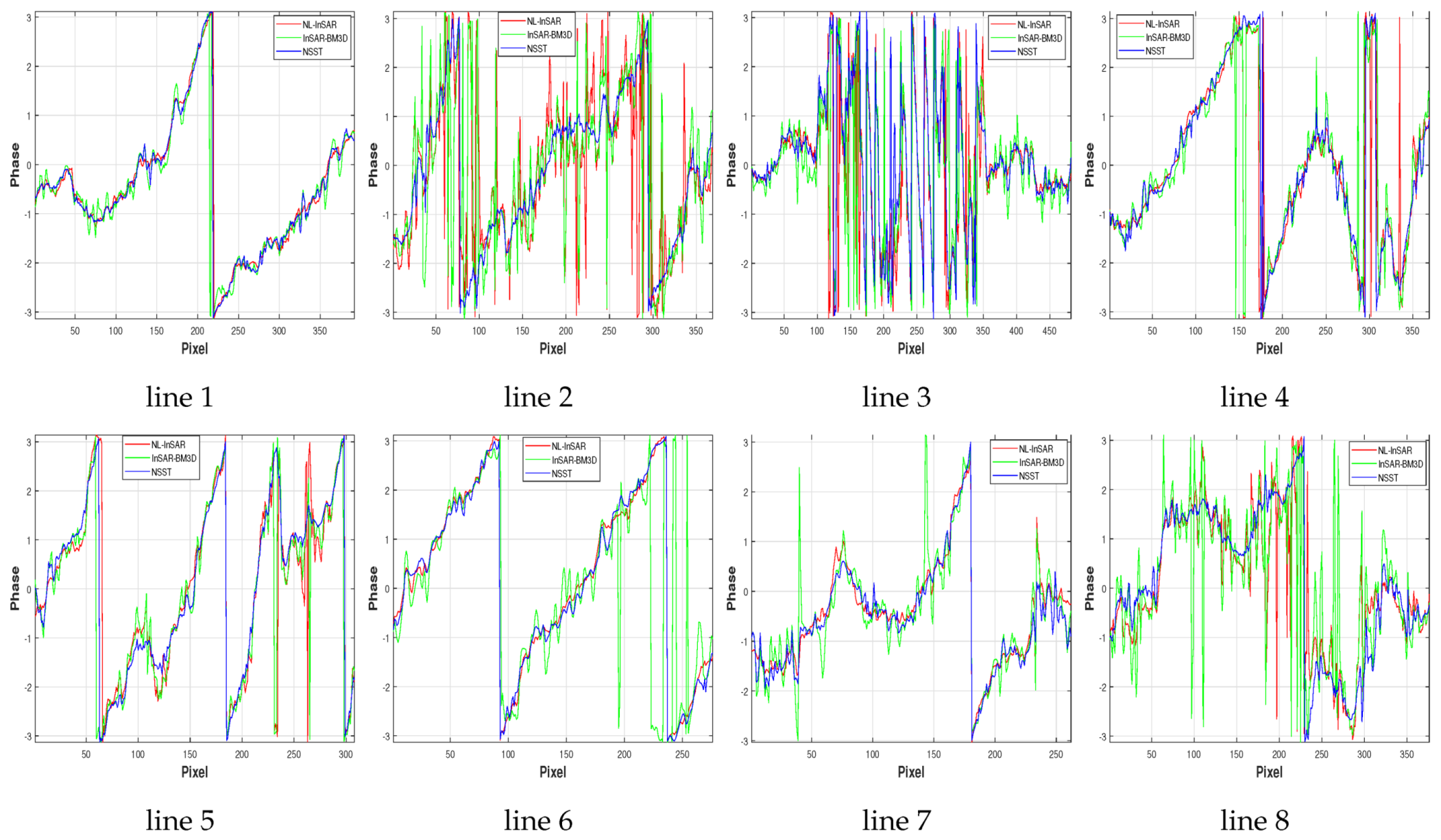
Figure 17, results of phase profiles are arranged in the order of its position (increase from left to right, from top to bottom). For simplicity,
Figure 17 only exhibits results of NL-InSAR, InSAR-BM3D and the proposed method, which are superior to other methods intuitively. As shown in line 3, none of three methods can recover the real phase correctly at complex topography region.The difficulty is inherent defect of interferogram with too long baseline. The phase profile at flat region with high-coherence, which corresponds to line 1 and line 6, is estimated appropriately by NL-InSAR and the proposed method. However, a few abnormal values arise in the result of InSAR-BM3D. The comparison result of the number of abnormal values at high-coherence region corresponding to steep topography (line 5) can be expressed as: the proposed method≥NL-InSAR>InSAR-BM3D. For the low-coherence region (line 2 and line 8), the proposed method outperforms NL-InSAR and InSAR-BM3D. The proposed method produces a more stationarity and authentic result. It is consistent with the result in
Figure 15. On balance, the proposed method has the best comprehensive performance.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}