A Modified TurboEdit Cycle-Slip Detection and Correction Method for Dual-Frequency Smartphone GNSS Observation


Abstract
:1. Introduction
2. Methodology
2.1. Traditional TurboEdit Algorithm
2.2. Modified TurboEdit Method
3. Experimental Results and Analysis
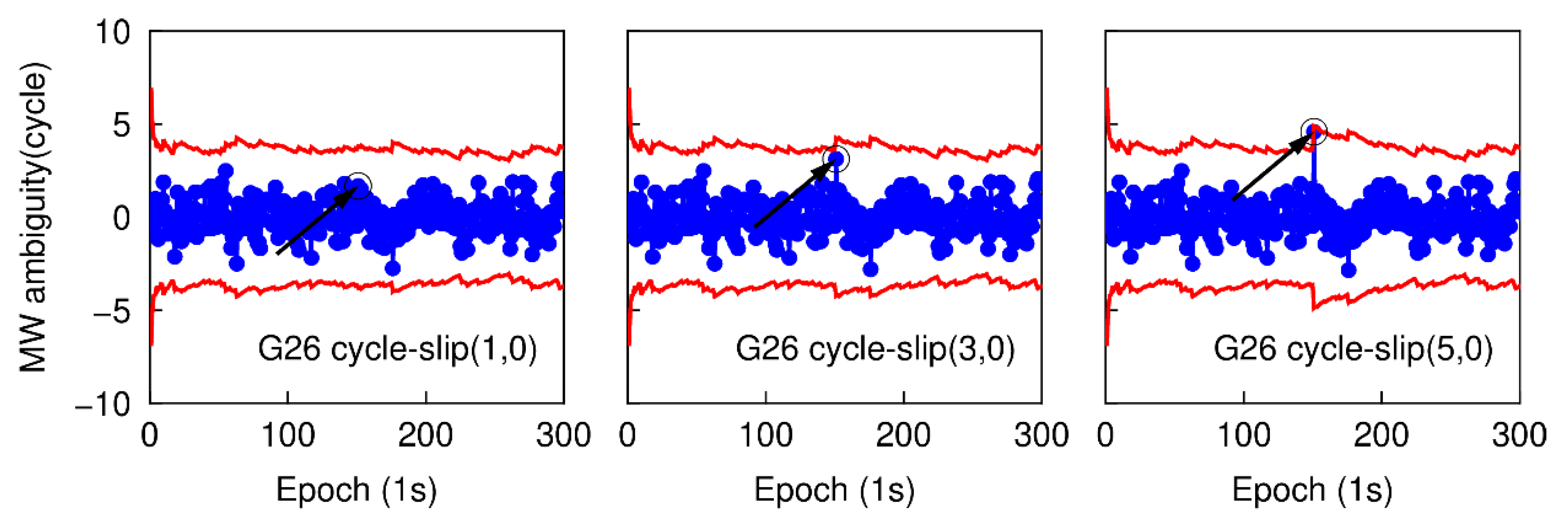
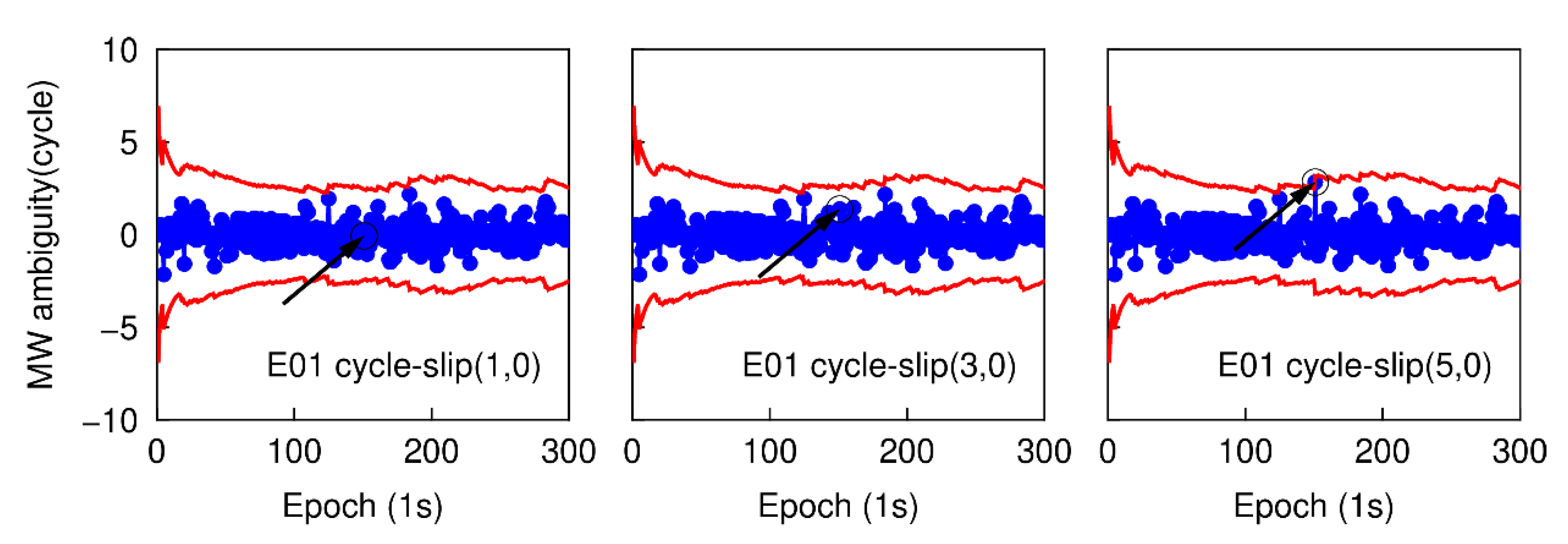
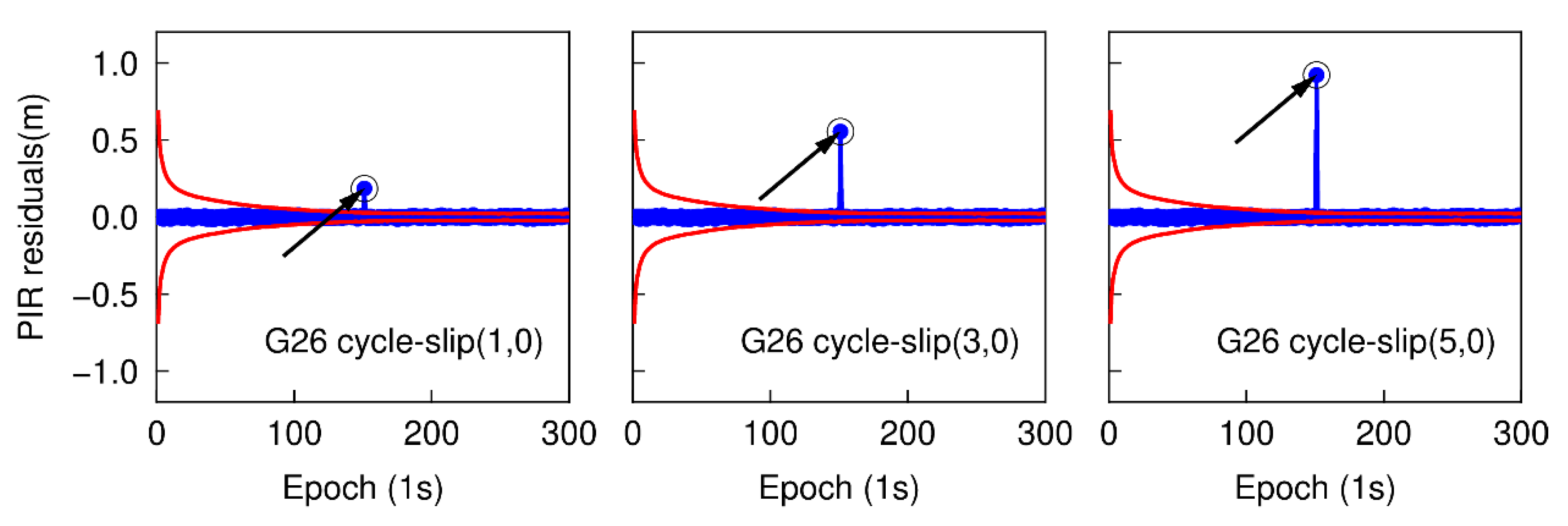
3.1. Small Cycle-Slip Combination Detection and Correction
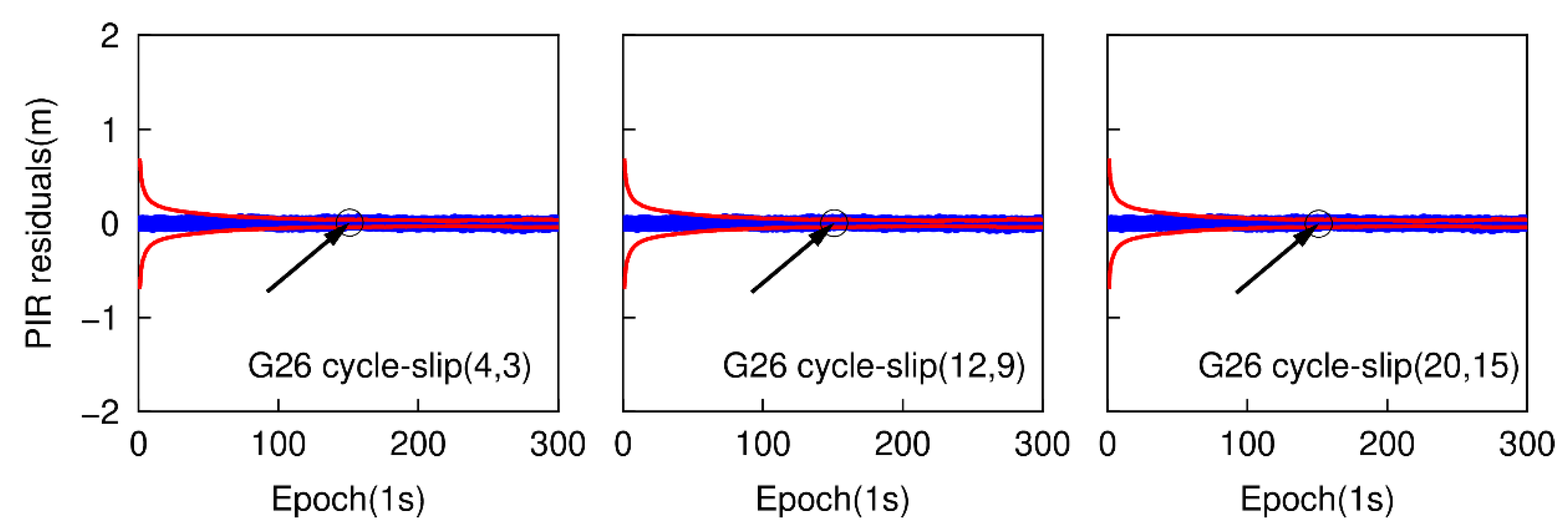
3.2. Specific Small Cycle-Slip Combination Detection and Correction
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Banville, S.; Van Diggelen, F. Precise positioning using raw GPS measurements from Android smartphones. GPS World 2016, 27, 43–48. [Google Scholar]
- Laurichesse, D.; Rouch, C.; Marmet, F.X.; Pascaud, M. Smartphone applications for precise point positioning. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2017), Portland, Oregon, 25–29 September 2017; Volume 1, pp. 171–187. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Elmezayen, A.; El-Rabbany, A. Precise point positioning using world’s first dual-frequency GPS/galileo smartphone. Sensors 2019, 19, 2593. [Google Scholar] [CrossRef] [Green Version]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 android smartphone and positioning performance analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise point positioning using dual-frequency GNSS observations on smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [Green Version]
- Wanninger, L.; Heßelbarth, A. GNSS code and carrier phase observations of a Huawei P30 smartphone: Quality assessment and centimeter-accurate positioning. GPS Solut. 2020, 24. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Wang, F.; Sang, J.; Lin, X.; Gong, X.; Zhang, W. Characteristics analysis of raw multi-GNSS measurement from Xiaomi Mi 8 and positioning performance improvement with L5/E5 frequency in an urban environment. Remote Sens. 2020, 12, 744. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Li, G. On the feasibility of resolving Android GNSS carrier-phase ambiguities. J. Geod. 2019, 93, 2621–2635. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V. Towards high accuracy GNSS real-time positioning with smartphones. Adv. Space Res. 2019, 63, 94–102. [Google Scholar] [CrossRef]
- Zhao, Q.; Sun, B.; Dai, Z.; Hu, Z.; Shi, C.; Liu, J. Real-time detection and repair of cycle slips in triple-frequency GNSS measurements. GPS Solut. 2015, 19, 381–391. [Google Scholar] [CrossRef]
- Goad, C.C. Precise positioning with the GPS. In Applied Geodesy; Springer: Berlin/Heidelberg, Germany, 1987; pp. 17–30. [Google Scholar]
- Bastos, L.; Landau, H. Fixing cycle slips in dual-frequency kinematic GPS-applications using Kalman filtering. Manuscr Geod. 1998, 13, 249–256. [Google Scholar]
- Lichtenegger, H.; Hofmann-Wellenhof, B. GPS-data preprocessing for cycle-slip detection. In Global Positioning System: An Overview; Springer: Berlin/Heidelberg, Germany, 1990; pp. 57–68. [Google Scholar]
- Han, S. Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning. J. Geod. 1997, 71, 351–361. [Google Scholar] [CrossRef]
- Kleusberg, A.; Georgiadou, Y.; van den Heuvel, F.; Heroux, P. GPS Data Preprocessing with DIPOP 3.0.; Internal Technical Memorandum; Department of Surveying Engineering; University of New Brunswick: Fredericton, NB, Canda, 1993. [Google Scholar]
- Collin, F.; Warnant, R. Application of the Wavelet Transform for GPS Cycle Slip Correction and Comparison with Kalman Filter. Manuscripta Geod. 1995, 20, 161–172. [Google Scholar]
- Yi, T.; Li, H.; Wang, G. Cycle slip detection and correction of GPS carrier phase based on wavelet transform and neural network. In Proceedings of the Sixth International Conference on Intelligent Systems Design and Applications, Jinan, China, 16–18 October 2006; Volume 1, pp. 46–50. [Google Scholar]
- Miao, Y.; Sun, Z.W.; Wu, S.N. Error analysis and cycle-slip detection research on satellite-borne GPS observation. J. Aerosp. Eng. 2011, 24, 95–101. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef] [Green Version]
- Xiao, G.; Mayer, M.; Heck, B.; Sui, L.; Zeng, T.; Zhao, D. Improved time-differenced cycle slip detect and repair for GNSS undifferenced observations. GPS Solut. 2017, 22, 6. [Google Scholar] [CrossRef]
- Lichten, S.M.; Bar-Sever, Y.E.; Bertiger, W.I.; Heflin, M.; Hurst, K.; Muellerschoen, R.J.; Wu, S.C.; Yunck, T.P.; Zumberge, J. Gipsy-Oasis II: A high precision GPS data processing system and general satellite orbit analysis tool, technology 2006. In Proceedings of the NASA Technology Transfer Conference, Chicago, IL, USA, 24–26 October 1995. [Google Scholar]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; Bern Open Publishing: Bern, Switzerland, 2015. [Google Scholar]
- Cai, C.; Liu, Z.; Xia, P.; Dai, W. Cycle slip detection and repair for undifferenced GPS observations under high ionospheric activity. GPS Solut. 2013, 17, 247–260. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Wang, Z.; Nie, Z.; Ou, J. An improved cycle slip detection based on TurboEdit method for dual-frequency GPS receiver. Geomatics Inf. Sci. Wuhan Univ. 2014, 39, 1017–1021. [Google Scholar]
- Baarda, W. A testing procedure for use in geodetic networks. Publ. Geod. New Ser. 1968, 2. [Google Scholar]
- Banville, S.; Langley, R.B. Mitigating the impact of ionospheric cycle slips in GNSS observations. J. Geod. 2013, 87, 179–193. [Google Scholar] [CrossRef]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2019, 24, 9. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Li, B.; Liu, T.; Nie, L.; Qin, Y. Single-frequency GNSS cycle slip estimation with positional polynomial constraint. J. Geod. 2019, 93, 1781–1803. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Penalized GNSS Ambiguity Resolution. J. Geod. 2004, 78, 235–244. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle-Slip Combinations | Satellite | Cycle-Slip Detectable? | The Ratio Test Values | Integer Estimation of Cycle-Slips | ||
|---|---|---|---|---|---|---|
| MW | PIR | Modified Method | ||||
| (1, 0) | G26 | No | Yes | Yes | 438.12 | (1, 0) |
| E01 | No | Yes | Yes | 382.60 | ||
| (3, 0) | G26 | No | Yes | Yes | 453.80 | (3, 0) |
| E01 | No | Yes | Yes | 368.79 | ||
| (5, 0) | G26 | No | Yes | Yes | 408.80 | (5, 0) |
| E01 | No | Yes | Yes | 395.97 | ||
| Cycle-Slip Combinations | Satellite | Cycle-Slip Detectable? | The Ratio Test Values | Integer Estimation of Cycle-Slips | ||
|---|---|---|---|---|---|---|
| MW | PIR | Modified Method | ||||
| (4, 3) | G26 | No | No | Yes | 428.82 | (4, 3) |
| E01 | No | No | Yes | 449.13 | ||
| (12, 9) | G26 | No | No | Yes | 455.23 | (12, 9) |
| E01 | No | No | Yes | 502.61 | ||
| (20, 15) | G26 | No | No | Yes | 361.20 | (20, 15) |
| E01 | No | No | Yes | 438.91 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Nie, Z.; Wang, Z.; Zhang, Y. A Modified TurboEdit Cycle-Slip Detection and Correction Method for Dual-Frequency Smartphone GNSS Observation. Sensors 2020, 20, 5756. https://doi.org/10.3390/s20205756
Xu X, Nie Z, Wang Z, Zhang Y. A Modified TurboEdit Cycle-Slip Detection and Correction Method for Dual-Frequency Smartphone GNSS Observation. Sensors. 2020; 20(20):5756. https://doi.org/10.3390/s20205756
Chicago/Turabian StyleXu, Xiaofei, Zhixi Nie, Zhenjie Wang, and Yuanfan Zhang. 2020. "A Modified TurboEdit Cycle-Slip Detection and Correction Method for Dual-Frequency Smartphone GNSS Observation" Sensors 20, no. 20: 5756. https://doi.org/10.3390/s20205756