Enhanced LoRaWAN Adaptive Data Rate for Mobile Internet of Things Devices





Abstract
:
1. Introduction
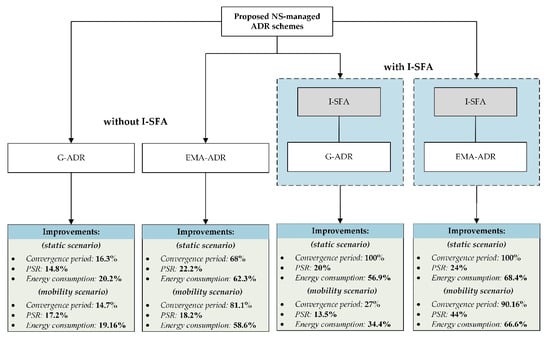
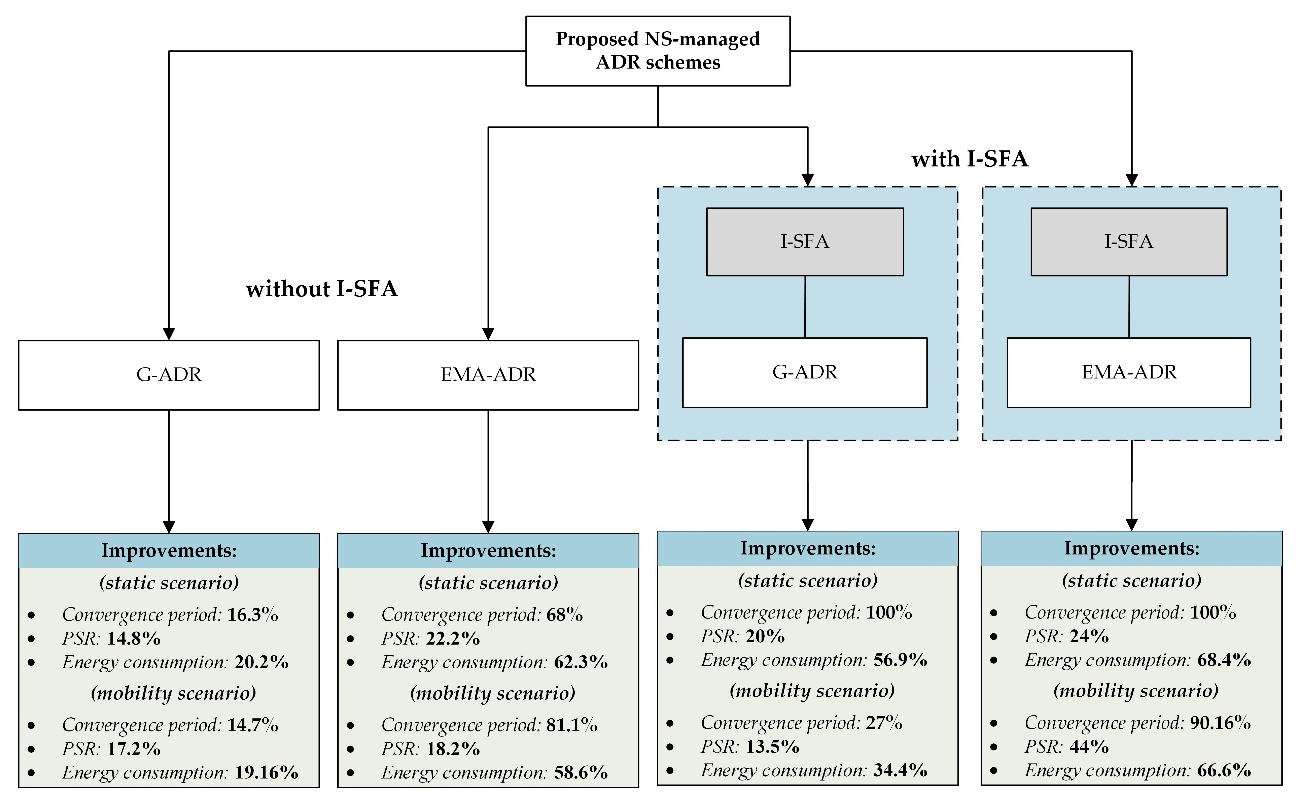
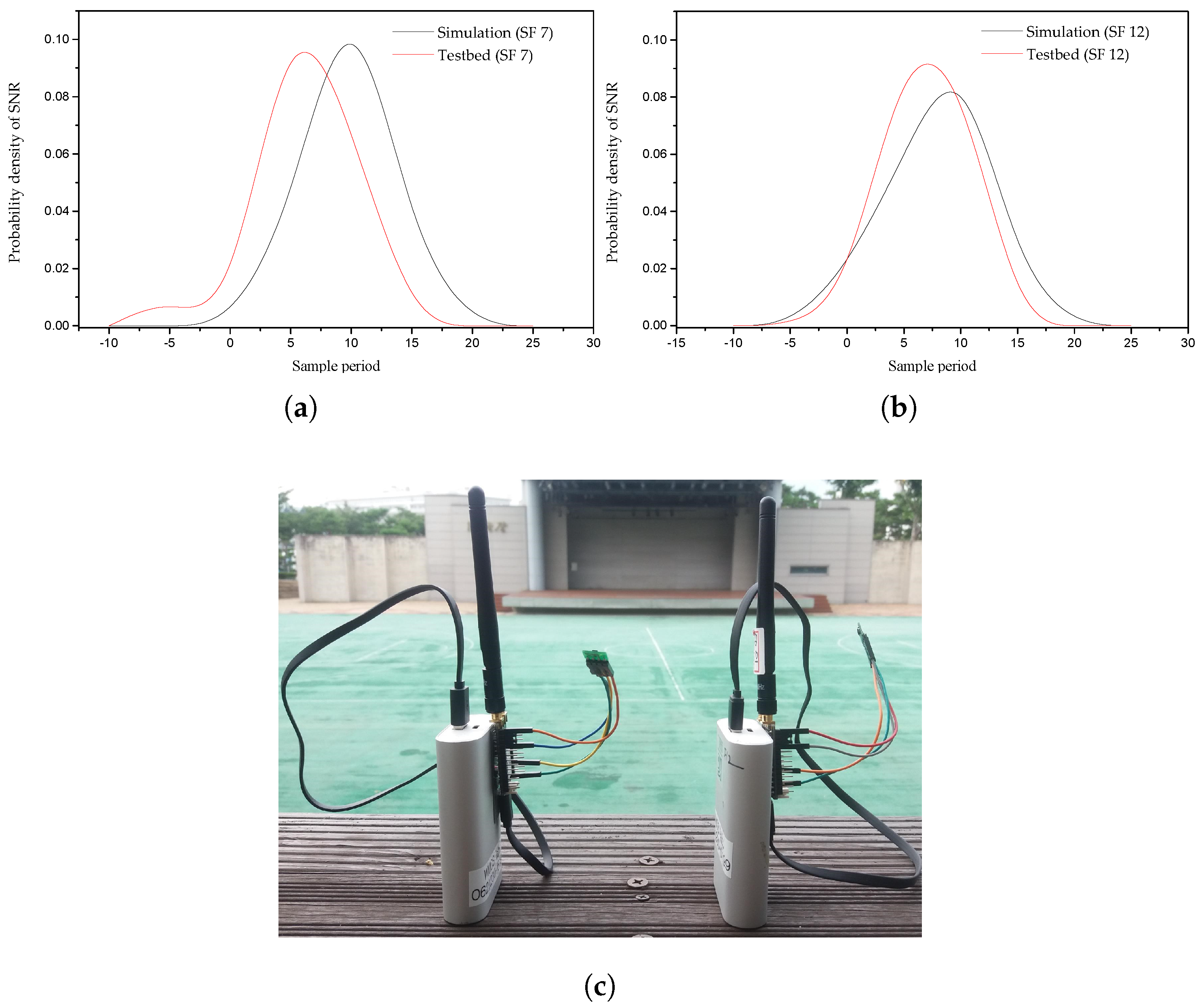
- First, we propose a Gaussian filter-based ADR (G-ADR) to smooth the signal-to-noise ratio (SNR) of M packets received at the NS. Through real-time experiments and computer simulations, we show that the SNR of LoRaWAN packets received at an NS follows a Gaussian distribution. By employing a Gaussian filter, G-ADR can optimally find both SF and TP parameters, which results in a reduced convergence period and improved PSR.
- Second, we propose another NS-managed ADR based on the exponential moving average (EMA-ADR). Through computer simulations, we show that the smoothing process using the EMA filter decreases the spikes of raw SNR values. Hence, EMA-ADR advances the PSR and reduces the convergence period when compared to the typical ADR.
- In addition, we show that both G-ADR and EMA-ADR, when jointly utilized with the initial SF allocation method, significantly improve the convergence period and PSR.
2. Related Studies
2.1. Enhancements in Typical ADR
2.2. Reduction of Convergence Period in Typical ADR
3. Proposed ADR Schemes
3.1. Gaussian Filter-Based ADR (G-ADR)
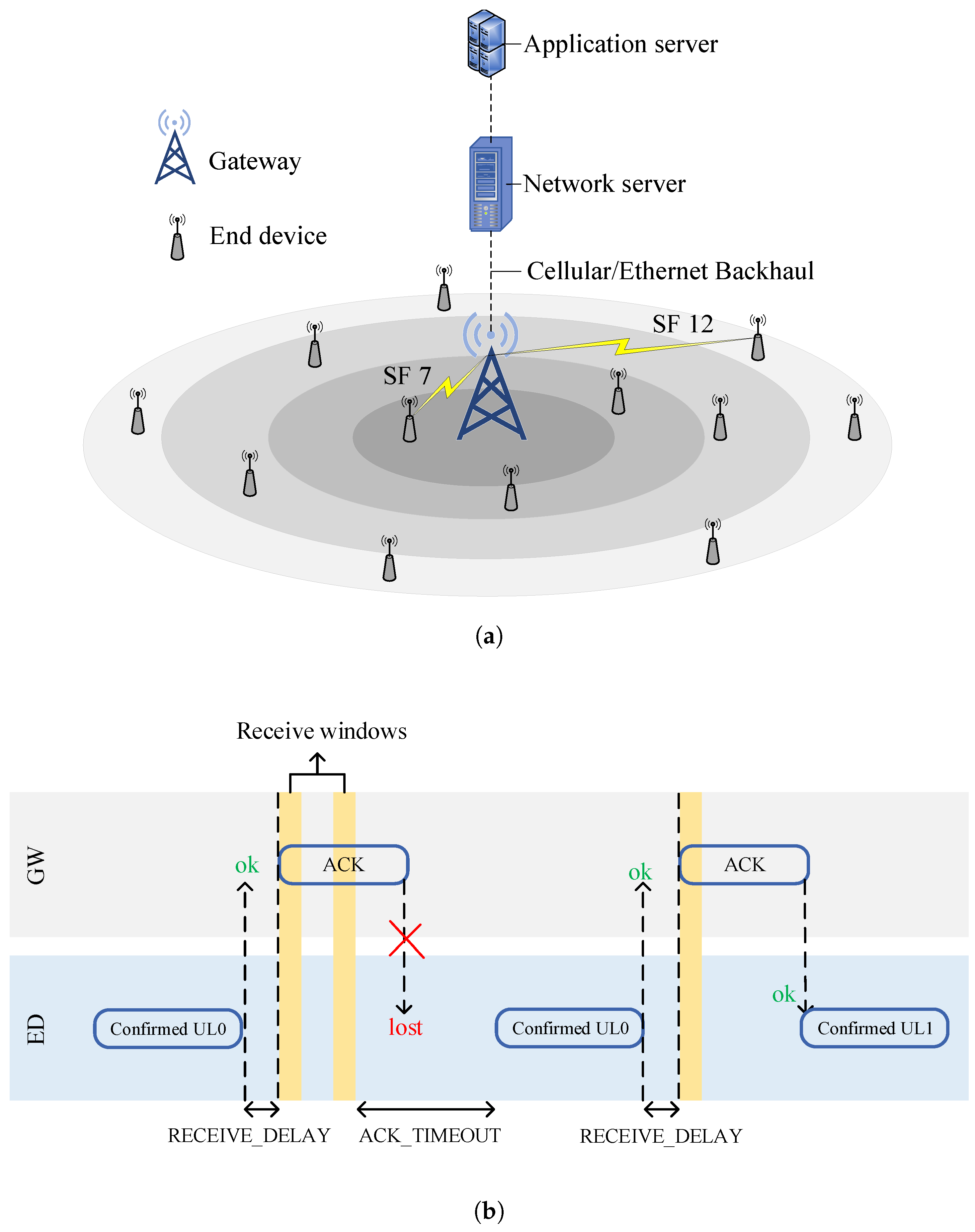
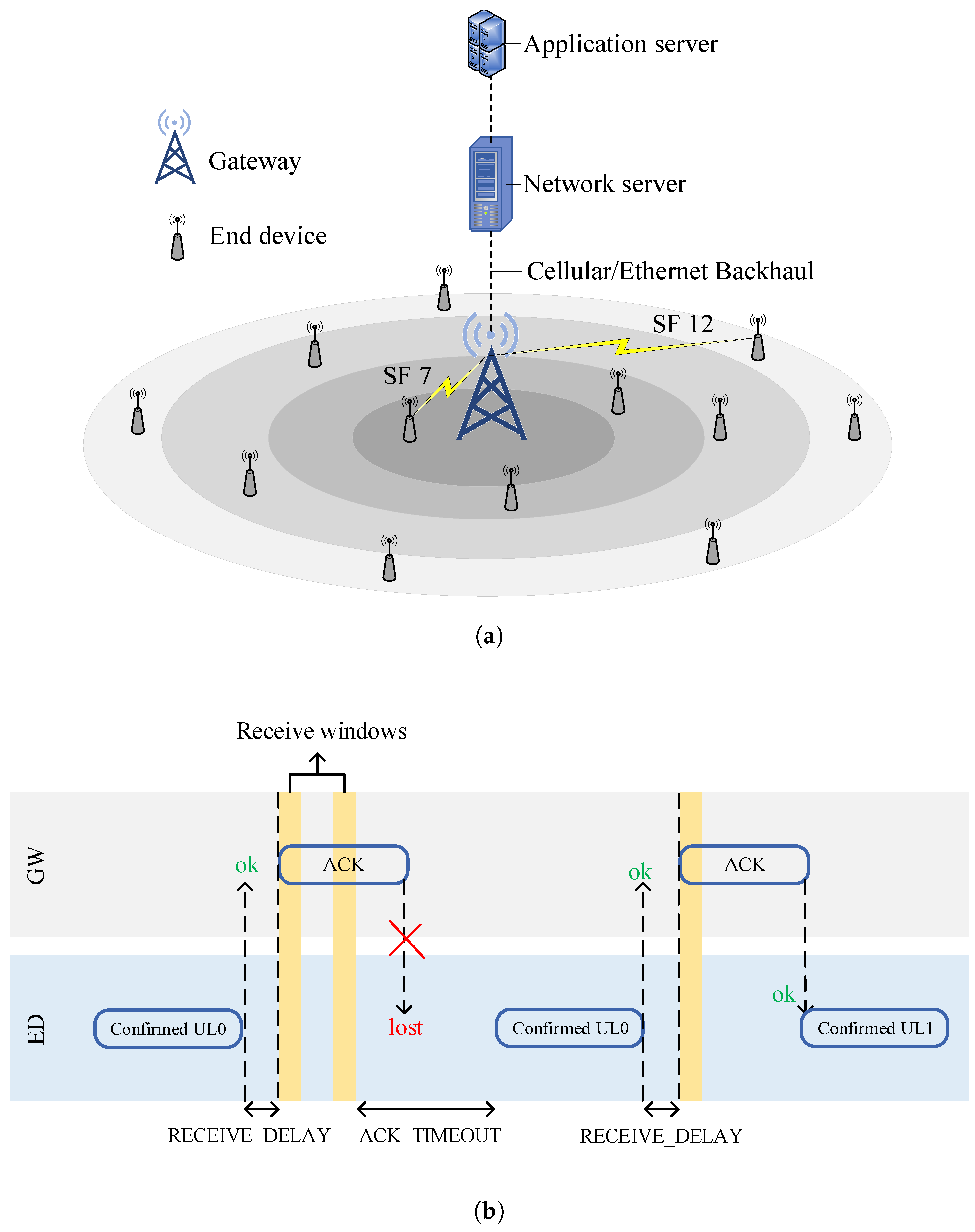
- When the NS receives an UL packet with the ACK bit enabled in the frame header of the MAC command, the NS starts tracking the SNR of the M received packets. The G-ADR algorithm is initiated by computing the mean () and variance () using (1) and (2) [28], respectively.where i is the ith packet among M, where M = 20.Now, the probability density function (PDF) is expressed, as follows [28]:
- The proposed G-ADR accepts the centralized SNR values that lie within the effective range of + and − . The SNR value is estimated by averaging the values that are within the effective range.
3.2. Exponential Moving Average-Based ADR (EMA-ADR)
| Algorithm 1: Proposed Gaussian filter-based adaptive data rate (G-ADR) scheme. |
 |
4. Experimental Results and Analysis
4.1. Simulation Setup
4.2. LoRaWAN Network Environment
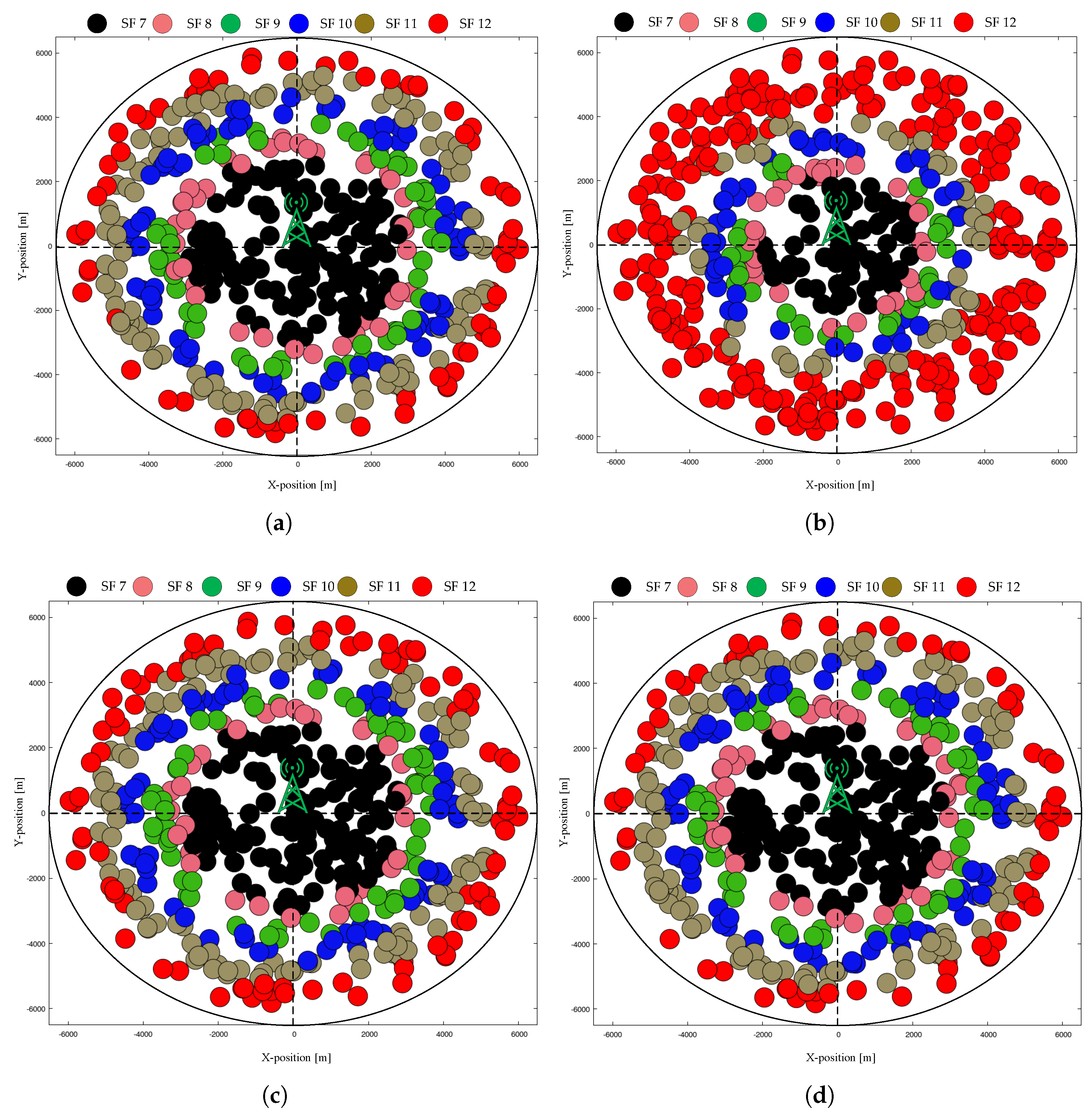
4.2.1. Initial Network Topology
4.2.2. Final Network Topology
4.3. Convergence Period Analysis
4.3.1. Static EDs scenario
4.3.2. Mobile EDs Scenario
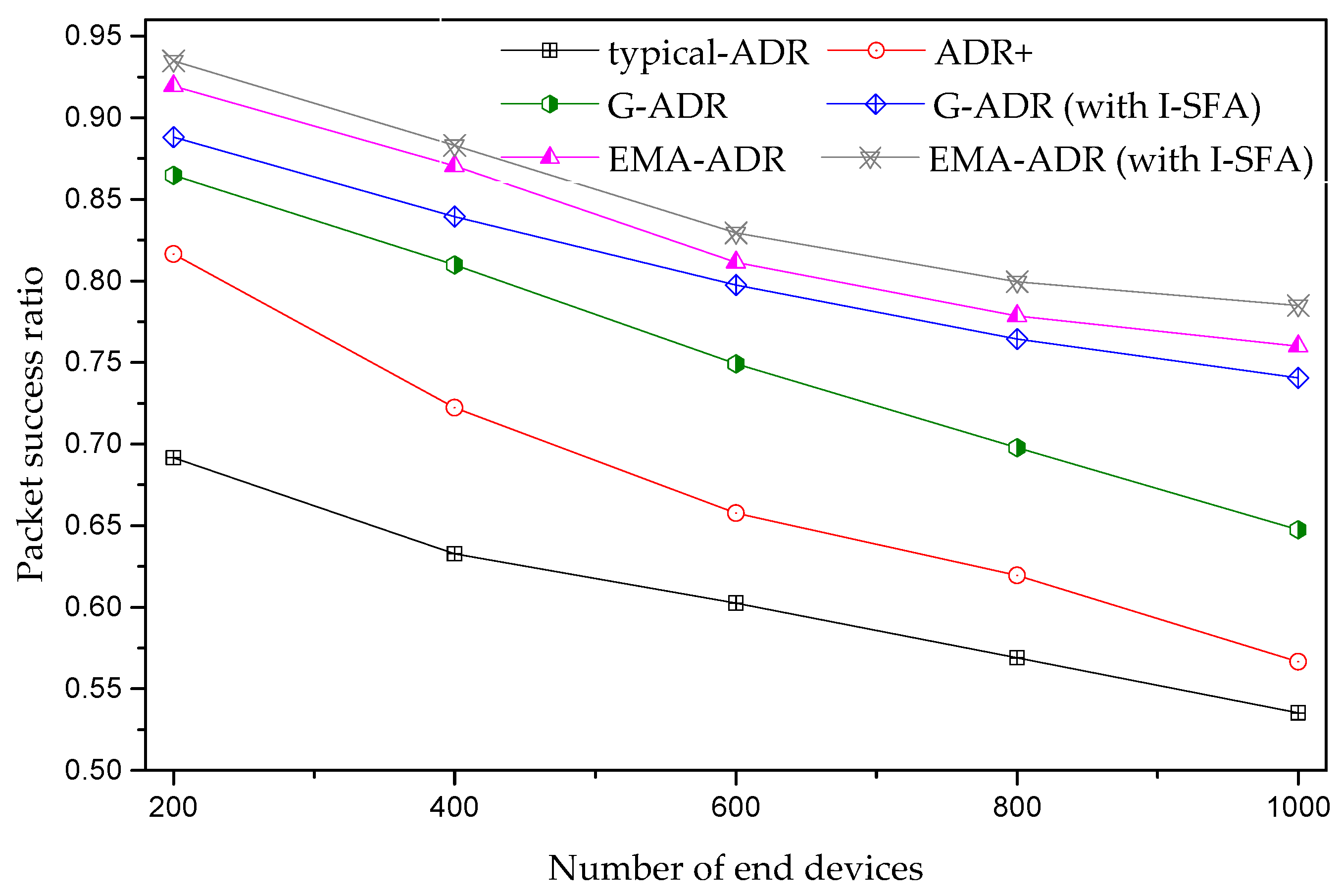
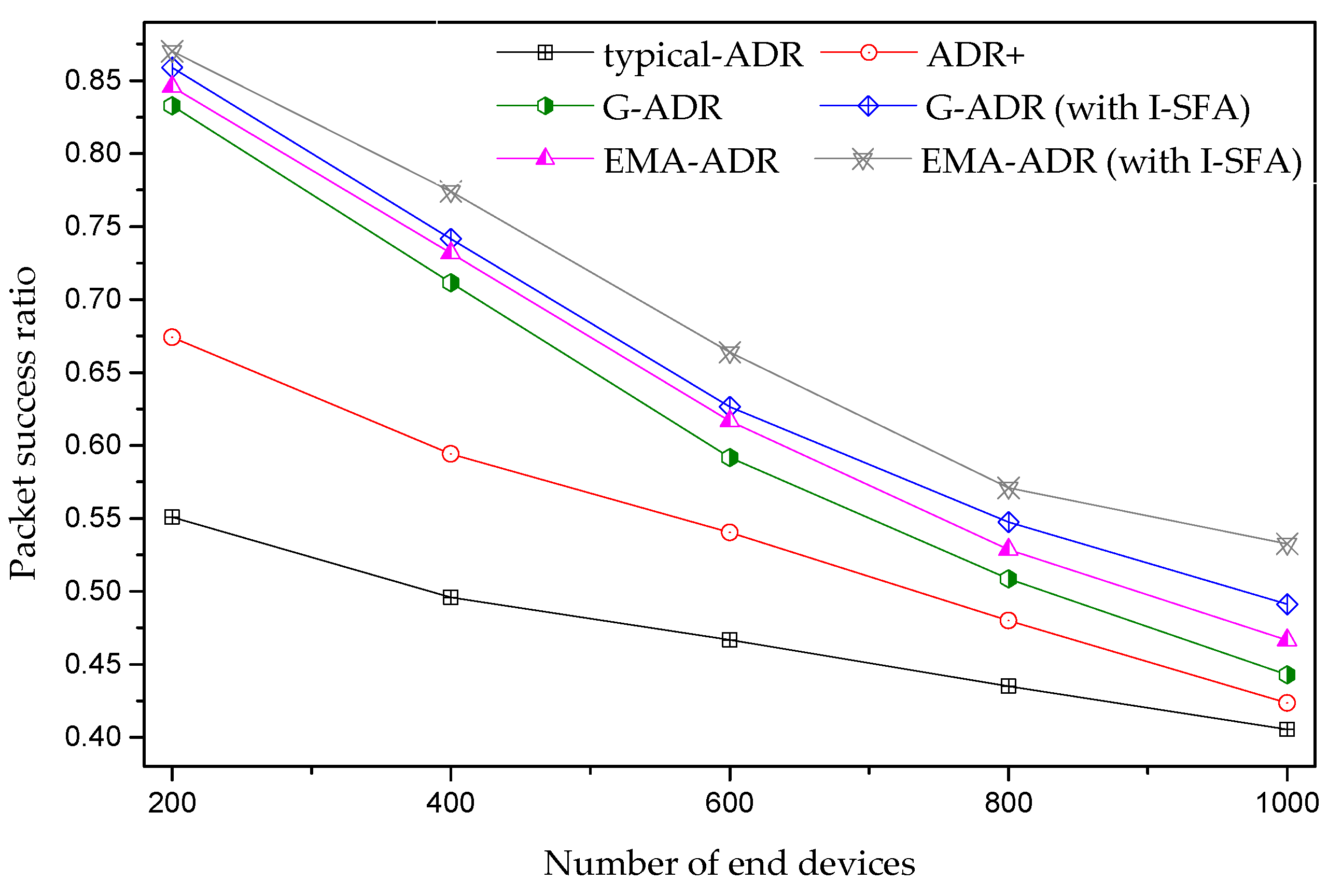
4.4. Average PSR Analysis
4.4.1. Static EDs Scenario
4.4.2. Mobile EDs Scenario
4.5. Average Energy Consumption Analysis
4.5.1. Static EDs Scenario
4.5.2. Mobile EDs Scenario
5. The Adaptation of Proposed Schemes in a LoRaWAN Deployment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ACK | Acknowledment |
| ADR | Adaptive Data Rate |
| DL | Downlink |
| ED | End Device |
| EMA-ADR | Exponential Moving Average ADR |
| G-ADR | Gaussian Distribution based ADR |
| GW | Gateway |
| I-SFA | Initial Spreading Factor Assignment |
| IoT | Internet of Things |
| LoRaWAN | Long-Range Wide Area Network |
| LPWAN | Low-Power Wide Area Network |
| MAC | Media Access Control |
| NS | Network Server |
| PSR | Packet Success Ratio |
| RX | Receive Window |
| SF | Spreading Factor |
| SNR | Signal-to-Noise Ratio |
| ToA | Time-on-Air |
| TP | Transmit Power |
| UL | Uplink |
References
- Georgiou, O.; Raza, U. Low power wide area network analysis: Can LoRa scale. IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef] [Green Version]
- Alliance, L. LoRaWAN™ 1.1 Specification. 2020. Available online: https://lora-alliance.org/sites/default/files/2020-06/rp_2-1.0.1.pdf (accessed on 2 September 2020).
- Marais, J.M.; Abu-Mahfouz, A.M.; Hancke, G.P. A Survey on the Viability of Confirmed Traffic in a LoRaWAN. IEEE Access 2020, 8, 9296–9311. [Google Scholar] [CrossRef]
- Ducrot, N.; Ray, D.; Saadani, A.; Hersent, O.; Pop, G.; Remond, G. Lora Device Developer Guide. 2016. Available online: https://developer.orange.com/wp-content/uploads/LoRa-Device-Developer-Guide-Orange.pdf (accessed on 6 May 2020).
- GSMA-3GPP. 3GPP Low Power Wide Area Technologies. 2016. Available online: https://www.gsma.com/iot/wp-content/uploads/2016/10/3GPP-Low-Power-Wide-Area-Technologies-GSMA-White-Paper.pdf (accessed on 4 March 2020).
- Farhad, A.; Kim, D.H.; Pyun, J.Y. Resource Allocation to Massive Internet of Things in LoRaWANs. Sensors 2020, 20, 2645. [Google Scholar] [CrossRef] [PubMed]
- Semtech. Understanding the LoRa Adaptive Data Rate. 2019. Available online: https://lora-developers.semtech.com/uploads/documents/files/Understanding_LoRa_Adaptive_Data_Rate_Downloadable.pdf (accessed on 4 August 2020).
- Marini, R.; Cerroni, W.; Buratti, C. A Novel Collision-Aware Adaptive Data Rate Algorithm for LoRaWAN Networks. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Davoli, G.; Cerroni, W.; Tomovic, S.; Buratti, C.; Contoli, C.; Callegati, F. Intent-based service management for heterogeneous software-defined infrastructure domains. Int. J. Netw. Manag. 2019, 29, e2051. [Google Scholar] [CrossRef]
- Pan, J.; McElhannon, J. Future edge cloud and edge computing for internet of things applications. IEEE Internet Things J. 2017, 5, 439–449. [Google Scholar] [CrossRef]
- Sarker, V.K.; Queralta, J.P.; Gia, T.N.; Tenhunen, H.; Westerlund, T. A survey on LoRa for IoT: Integrating edge computing. In Proceedings of the 2019 Fourth International Conference on Fog and Mobile Edge Computing (FMEC), Rome, Italy, 10–13 June 2019; pp. 295–300. [Google Scholar]
- Haxhibeqiri, J.; De Poorter, E.; Moerman, I.; Hoebeke, J. A survey of lorawan for iot: From technology to application. Sensors 2018, 18, 3995. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mikhaylov, K.; Petaejaejaervi, J.; Haenninen, T. Analysis of capacity and scalability of the LoRa low power wide area network technology. In Proceedings of the European Wireless 2016; 22th European Wireless Conference, Oulu, Finland, 18–20 May 2016; pp. 1–6. [Google Scholar]
- Kufakunesu, R.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on Adaptive Data Rate Optimization in LoRaWAN: Recent Solutions and Major Challenges. Sensors 2020, 20, 5044. [Google Scholar] [CrossRef] [PubMed]
- Hauser, V.; Hégr, T. Proposal of adaptive data rate algorithm for lorawan-based infrastructure. In Proceedings of the 2017 IEEE 5th International Conference on Future Internet of Things and Cloud (FiCloud), Prague, Czech Republic, 21–23 August 2017; pp. 85–90. [Google Scholar]
- Kousias, K.; Caso, G.; Alay, Ö.; Lemic, F. Empirical Analysis of LoRaWAN Adaptive Data Rate for Mobile Internet of Things Applications. In Proceedings of the 2019 on Wireless of the Students, by the Students, and for the Students Workshop, Los Cabos, Mexico, 21 October 2019; pp. 9–11. [Google Scholar]
- Li, S.; Raza, U.; Khan, A. How Agile is the Adaptive Data Rate Mechanism of LoRaWAN. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018; pp. 206–212. [Google Scholar]
- Finnegan, J.; Farrell, R.; Brown, S. Analysis and Enhancement of the LoRaWAN Adaptive Data Rate Scheme. IEEE Internet Things J. 2020, 7, 7171–7180. [Google Scholar] [CrossRef]
- Kim, D.Y.; Kim, S.; Hassan, H.; Park, J.H. Adaptive data rate control in low power wide area networks for long range IoT services. J. Comput. Sci. 2017, 22, 171–178. [Google Scholar] [CrossRef]
- Slabicki, M.; Premsankar, G.; Di Francesco, M. Adaptive configuration of LoRa networks for dense IoT deployments. In Proceedings of the IEEE/IFIP Network Operations and Management Symposium, Taipei, Taiwan, 23–27 April 2018; pp. 1–9. [Google Scholar]
- Benkahla, N.; Tounsi, H.; Ye, S.; Frikha, M. Enhanced ADR for LoRaWAN networks with mobility. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 1–6. [Google Scholar]
- Park, J.; Park, K.; Bae, H.; Kim, C.k. EARN: Enhanced ADR with Coding Rate Adaptation in LoRaWAN. IEEE Internet Things J. 2020. [Google Scholar] [CrossRef]
- Finnegan, J.; Brown, S.; Farrell, R. Modeling the Energy Consumption of LoRaWAN in ns-3 Based on Real World Measurements. In Proceedings of the 2018 Global Information Infrastructure and Networking Symposium (GIIS), Thessaloniki, Greece, 23–25 October 2018; pp. 1–4. [Google Scholar]
- Magrin, D.; Centenaro, M.; Vangelista, L. Performance evaluation of LoRa networks in a smart city scenario. In Proceedings of the IEEE International Conference on communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Semtech. Semtech SX1301 WIRELESS & SENSING PRODUCTS Datasheet. 2017. Available online: https://www.semtech.com/products/wireless-rf/lora-gateways/sx1301 (accessed on 2 January 2020).
- Semtech. Semtech WIRELESS & SENSING PRODUCTS, Sx1272. 2017. Available online: https://www.semtech.com/products/wireless-rf/lora-transceivers/sx1272, (accessed on 2 January 2020).
- Aernouts, M.; BniLam, N.; Podevijn, N.; Plets, D.; Joseph, W.; Berkvens, R.; Weyn, M. Combining TDoA and AoA with a particle filter in an outdoor LoRaWAN network. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1060–1069. [Google Scholar]
- Subedi, S.; Pyun, J.Y. Practical fingerprinting localization for indoor positioning system by using beacons. J. Sens. 2017, 2017, 9742170. [Google Scholar] [CrossRef] [Green Version]
- Subedi, S.; Gang, H.S.; Ko, N.Y.; Hwang, S.S.; Pyun, J.Y. Improving indoor fingerprinting positioning with affinity propagation clustering and weighted centroid fingerprint. IEEE Access 2019, 7, 31738–31750. [Google Scholar] [CrossRef]
- Network Simulator (ns)-3. Available online: https://www.nsnam.org/ (accessed on 11 December 2019).
- Podevijn, N.; Plets, D.; Trogh, J.; Martens, L.; Suanet, P.; Hendrikse, K.; Joseph, W. TDoA-based outdoor positioning with tracking algorithm in a public LoRa network. Wirel. Commun. Mob. Comput. 2018, 2018, 1864209. [Google Scholar] [CrossRef]
- Farhad, A.; Kim, D.H.; Kim, B.H.; Mohammed, A.F.Y.; Pyun, J.Y. Mobility-Aware Resource Assignment to IoT Applications in Long-Range Wide Area Networks. IEEE Access 2020, 8, 186111–186124. [Google Scholar] [CrossRef]
- Farhad, A.; Kim, D.; Pyun, J. Scalability of LoRaWAN in an Urban Environment: A Simulation Study. In Proceedings of the Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 677–681. [Google Scholar] [CrossRef]
- 3GPP. Cellular System Support for Ulta-Low Complexity and Low Throughput Internet of Things (CIoT). 2016. Available online: https://itectec.com/archive/3gpp-specification-tr-45-820/ (accessed on 4 March 2020).
- Capuzzo, M.; Magrin, D.; Zanella, A. Confirmed traffic in LoRaWAN: Pitfalls and countermeasures. In Proceedings of the 2018 17th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Capri, Italy, 20–22 June 2018; pp. 1–7. [Google Scholar]
- Magrin, D.; Capuzzo, M.; Zanella, A. A thorough study of LoRaWAN performance under different parameter settings. IEEE Internet Things J. 2019, 7, 116–127. [Google Scholar] [CrossRef] [Green Version]
- Korbi, I.E.; Ghamri-Doudane, Y.; Saidane, L.A. LoRaWAN Analysis Under Unsaturated Traffic, Orthogonal and Non-Orthogonal Spreading Factor Conditions. In Proceedings of the 2018 IEEE 17th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 1–3 November 2018; pp. 1–9. [Google Scholar]
- Croce, D.; Gucciardo, M.; Tinnirello, I.; Garlisi, D.; Mangione, S. Impact of spreading factor imperfect orthogonality in lora communications. In International Tyrrhenian Workshop on Digital Communication; Springer: Berlin/Heidelberg, Germany, 6 September 2017; pp. 165–179. [Google Scholar]
- Zhu, G.; Liao, C.H.; Suzuki, M.; Narusue, Y.; Morikawa, H. Evaluation of LoRa receiver performance under co-technology interference. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 Januray 2018; pp. 1–7. [Google Scholar]
- Waret, A.; Kaneko, M.; Guitton, A.; El Rachkidy, N. LoRa throughput analysis with imperfect spreading factor orthogonality. IEEE Wirel. Commun. Lett. 2018, 8, 408–411. [Google Scholar] [CrossRef] [Green Version]
- Caillouet, C.; Heusse, M.; Rousseau, F. Optimal SF Allocation in LoRaWAN Considering Physical Capture and Imperfect Orthogonality. In Proceedings of the GLOBECOM 2019—IEEE Global Communications Conference, Waikoloa, HI, USA, 9–13 December 2019; pp. 1–8. [Google Scholar]
- Bor, M.C.; Roedig, U.; Voigt, T.; Alonso, J.M. Do LoRa low-power wide-area networks scale? In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM), New York, NY, USA, 13–17 November 2016; pp. 59–67. [Google Scholar]
- STM32. STM32 LoRa® Expansion Package for STM32Cube, UM2073 Rev 10. 2019. Available online: https://www.st.com/resource/en/user_manual/dm00300436-stm32-lora-expansion-package-for-stm32cube-stmicroelectronics.pdf (accessed on 27 October 2020).
- Alliance, L. FUOTA Process Summary Technical Recommendation, TR002 v1.0.0. 2019. Available online: https://lora-alliance.org/sites/default/files/2019-04/tr002-fuota_process_summary-v1.0.0.pdf (accessed on 27 October 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SF | GW Sensitivity () [dBm] | ED Sensitivity () [dBm] | SNR [dB] |
|---|---|---|---|
| 12 | −142.5 | −137.0 | −20 |
| 11 | −140.0 | −135.0 | −17.5 |
| 10 | −137.5 | −133.0 | −15 |
| 9 | −135.0 | −130.0 | −12.5 |
| 8 | −132.5 | −127.0 | −10 |
| 7 | −130.0 | −124.0 | −7.5 |
| Parameter | Value |
|---|---|
| Simulation time [days] | 4 |
| GW | 1 |
| 24 packets/day | |
| Packet length [bytes] | 51 [24] |
| UL packet transmission limit | 8 |
| Path loss exponent | 3.76 [33] |
| Propagation model | log-distance |
| Shadowing | de-correlation distance = 110 m [34] and |
| variance = 6 dB [35] | |
| ED movement speed [m/s] | 0.5∼1.5 |
| Transmit power [dBm] | 2∼14 |
| Frequency region | EU-868 |
| Channel bandwidth [kHz] | 125 |
| Coding rate | 4/8 |
| Scheme | ADR | ADR+ | G-ADR | G-ADR (I-SFA) | EMA-ADR | EMA-ADR (I-SFA) |
|---|---|---|---|---|---|---|
| SF 7 | 25.8% | 14% | 25.4% | 24% | 25.8% | 25.2% |
| SF 8 | 8.4% | 6.2% | 6.4% | 10% | 10.8% | 6.6% |
| SF 9 | 11% | 7% | 12.2% | 13.6% | 13.6% | 12% |
| SF 10 | 16% | 9.8% | 14.4% | 21.8% | 24.2% | 14% |
| SF 11 | 24% | 11.8% | 23.4% | 19.8% | 19.4% | 23.4% |
| SF 12 | 14.8% | 51.25% | 18.2% | 10.8% | 6.2% | 18.8% |
| N | ADR | ADR+ | G-ADR | G-ADR (I-SFA) | EMA-ADR | EMA-ADR (I-SFA) |
|---|---|---|---|---|---|---|
| 200 | 20 | 18 | 15 | 0 | 3 | 0 |
| 400 | 21 | 19 | 15 | 0 | 3 | 0 |
| 500 | 20 | 20 | 14 | 0 | 5 | 0 |
| 600 | 18 | 20 | 16 | 0 | 6 | 0 |
| 800 | 28 | 28 | 26 | 0 | 11 | 0 |
| 1000 | 40 | 39 | 37 | 0 | 19 | 0 |
| N | ADR | ADR+ | G-ADR | G-ADR (I-SFA) | EMA-ADR | EMA-ADR (I-SFA) |
|---|---|---|---|---|---|---|
| 200 | 22 | 21 | 15 | 16 | 3 | 0 |
| 400 | 23 | 20 | 17 | 15 | 6 | 0 |
| 500 | 15 | 14 | 16 | 13 | 3 | 3 |
| 600 | 13 | 14 | 14 | 13 | 3 | 3 |
| 800 | 20 | 21 | 22 | 15 | 4 | 3 |
| 1000 | 29 | 23 | 17 | 17 | 4 | 3 |
| N | ADR | ADR+ | G-ADR | G-ADR (I-SFA) | EMA-ADR | EMA-ADR (I-SFA) |
|---|---|---|---|---|---|---|
| 200 | - | +12.5% | +17.3% | +19.7% | +22.8% | +24.3% |
| 400 | - | +8.9% | +17.7% | +20.7% | +23.8% | +25.0% |
| 600 | - | +5.5% | +14.7% | +19.5% | +20.9% | +22.7% |
| 800 | - | +5.1% | +12.9% | +21.5% | +21.0% | +23.0% |
| 1000 | - | +3.1% | +11.2% | +20.5% | +22.5% | +25.0% |
| N | ADR | ADR+ | G-ADR | G-ADR (I-SFA) | EMA-ADR | EMA-ADR (I-SFA) |
|---|---|---|---|---|---|---|
| 200 | - | 12.3 | 28.2 | 30.8 | 29.5 | 31.9 |
| 400 | - | 9.8 | 21.6 | 24.6 | 23.6 | 27.8 |
| 600 | - | 7.4 | 12.5 | 16.0 | 15.0 | 19.7 |
| 800 | - | 4.5 | 7.3 | 11.2 | 9.4 | 13.6 |
| 1000 | - | 1.8 | 3.8 | 8.6 | 6.1 | 12.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farhad, A.; Kim, D.-H.; Subedi, S.; Pyun, J.-Y. Enhanced LoRaWAN Adaptive Data Rate for Mobile Internet of Things Devices. Sensors 2020, 20, 6466. https://doi.org/10.3390/s20226466
Farhad A, Kim D-H, Subedi S, Pyun J-Y. Enhanced LoRaWAN Adaptive Data Rate for Mobile Internet of Things Devices. Sensors. 2020; 20(22):6466. https://doi.org/10.3390/s20226466
Chicago/Turabian StyleFarhad, Arshad, Dae-Ho Kim, Santosh Subedi, and Jae-Young Pyun. 2020. "Enhanced LoRaWAN Adaptive Data Rate for Mobile Internet of Things Devices" Sensors 20, no. 22: 6466. https://doi.org/10.3390/s20226466
APA StyleFarhad, A., Kim, D.-H., Subedi, S., & Pyun, J.-Y. (2020). Enhanced LoRaWAN Adaptive Data Rate for Mobile Internet of Things Devices. Sensors, 20(22), 6466. https://doi.org/10.3390/s20226466