An Adaptive Filter for Nonlinear Multi-Sensor Systems with Heavy-Tailed Noise


Abstract
1. Introduction
- (1)
- The information filter form is adopted for simplified computation and facilitation of multi-sensor fusion.
- (2)
- A novel VBST-CIF algorithm for nonlinear systems with heavy-tailed noise is proposed. The SRC rule is introduced into the VB approach for joint estimation of states and noise statistics, by employing the ST distribution for modeling heavy-tailed noise.
- (3)
- The proposed VBST-CIF algorithm is further extended to multi-sensor fusion, deriving a novel VBST-CIFF algorithm. The proposed VBST-CIFF algorithm facilitates multi-sensor fusion in nonlinear systems with different heavy-tailed measurement noise statistics for each sensor.
- (4)
- Simulation and experimental results show that the proposed VBST-CIF/VBST-CIFF algorithms outperform conventional CIF and cubature information feedback fusion (CIFF) algorithms in scenarios concerning nonlinear systems with heavy-tailed noise.
2. Problem Formulation
- (1)
- The conventional CIF assumes Gaussian measurement noise distribution. For systems with heavy-tailed noise, CIF is not able to estimate states and the noise statistics simultaneously.
- (2)
- The current VB approach based on the conventional KF framework is not suited to nonlinear systems. In particular, the unknown noise matrix parameter is difficult to obtain in nonlinear systems;
- (3)
- For multi-sensor systems with measurement noise signals of the various sensors possibly having different statistics, it is an open issue to estimate and fuse states as well as noise statistics.
3. Variational Bayesian Student’s t-Based Cubature Information Filter
3.1. Spherical-Radial Cubature Rule
3.2. Student’s t Distribution and Time Update
3.3. Variational Bayesian Student’s t-Based Cubature Information Filter (VBST-CIF)
| Algorithm 1 Time-recursion of VBST-CIF |
| Input: , , , , , , , , |
| Step 1: Time update: |
| (1) Compute and based on the SRC rule by (17)–(21). |
| (2) Compute and by (22) and (23). |
| (3) Compute and by (13) and (14). |
| (4) Compute and by (15) and (16). |
| Step 2: Variational fixed point iterations: |
| Initialize: |
| , , , , , |
| Measurement update: |
| (1) Perform Cholesky decomposition of and cubature sampling via (56) and (57). |
| (2) Compute by (58)–(60). |
| (3) Variational parameter update |
| for do |
| (a) Compute by (31): |
| Compute by (34)–(38). |
| Update and by (33) and (33). |
| (b) Compute by (40): |
| Compute and by (41) and (42). |
| (c) Compute by (44): |
| Update and by (45) and (46). |
| (d) Compute by (48): |
| Compute by (54). |
| Compute by (55). |
| Update and by (61) and (61). |
| Compute and by (63) and (64). |
| end for: |
| Step 3: State update: |
| , , , , , |
| Output: , , , , , |
4. Variational Bayesian Student’s t-Based Cubature Information Feedback Fusion (VBST-CIFF)
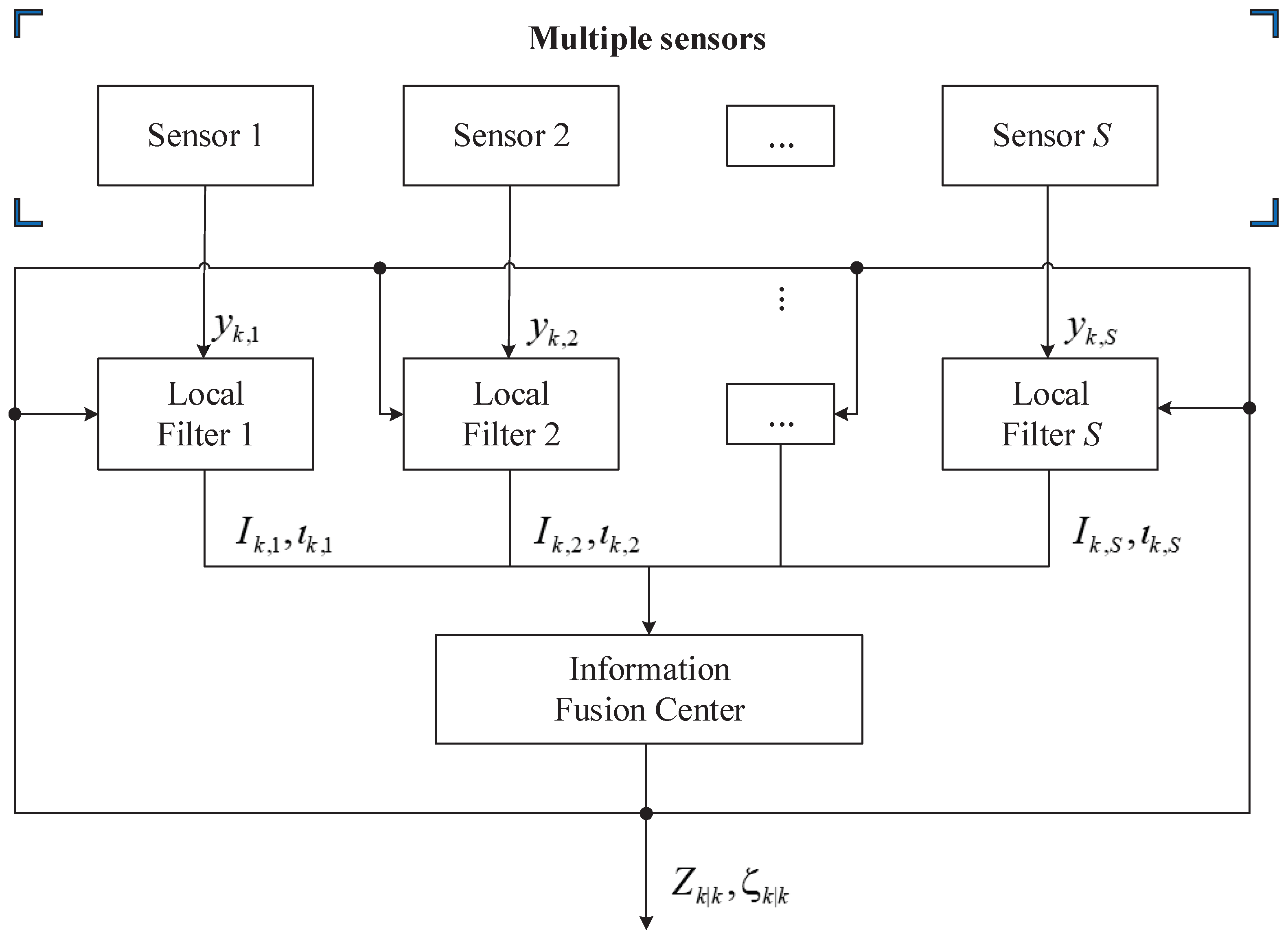
4.1. Multi-Sensor Cubature Information Feedback Fusion (CIFF)
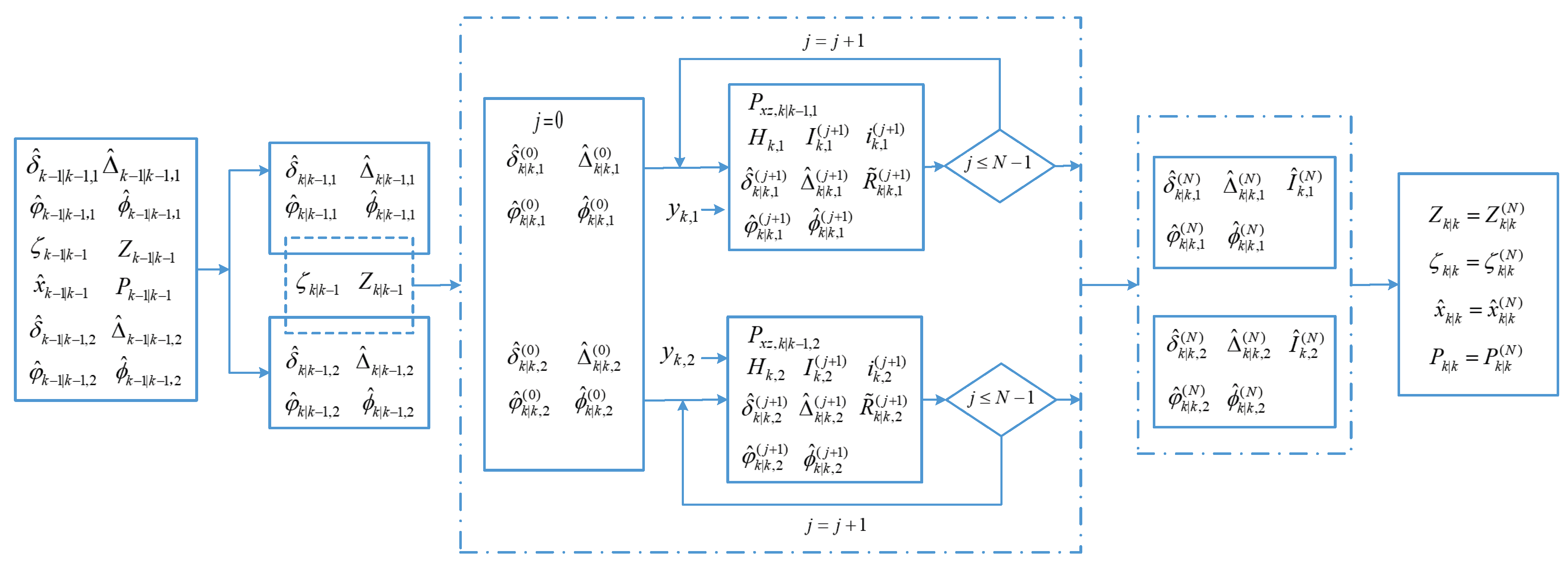
4.2. Variational Bayesian Student’s t-Based Cubature Information Feedback Fusion (VBST-CIFF)
| Algorithm 2 Time-recursion of VBST-CIFF |
| Input: , , , , , , , , |
| Step 1: Time update: |
| (1) Compute and by (22) and (23). |
| (2) Compute and by (71) and (72). |
| (3) Compute and by (73) and (74). |
| Step 2: Variational fixed-point iterations: |
| Initialize: |
| , , , , , |
| Measurement update: |
| (1) Perform Cholesky decomposition of and cubature sampling via (56) and (57). |
| (2) Compute by (87). |
| (3) Variational parameter update: |
| fordo |
| (a) Update , , and by (83)–(85). |
| (b) Update , , and by (80)–(82). |
| (c) Update , and by (75)–(77). |
| (d) Update by (86). |
| (e) Update and by (88) and (89). |
| (f) Set variational parameters: |
| , , , |
| end for |
| Step 3: Fusion (at the global center): |
| (1) Update and by (90) and (91); |
| (2) Update and via (63) and (64). |
| (3) Set: |
| , , , , , |
| Output:, , , , , |
5. Simulation Results
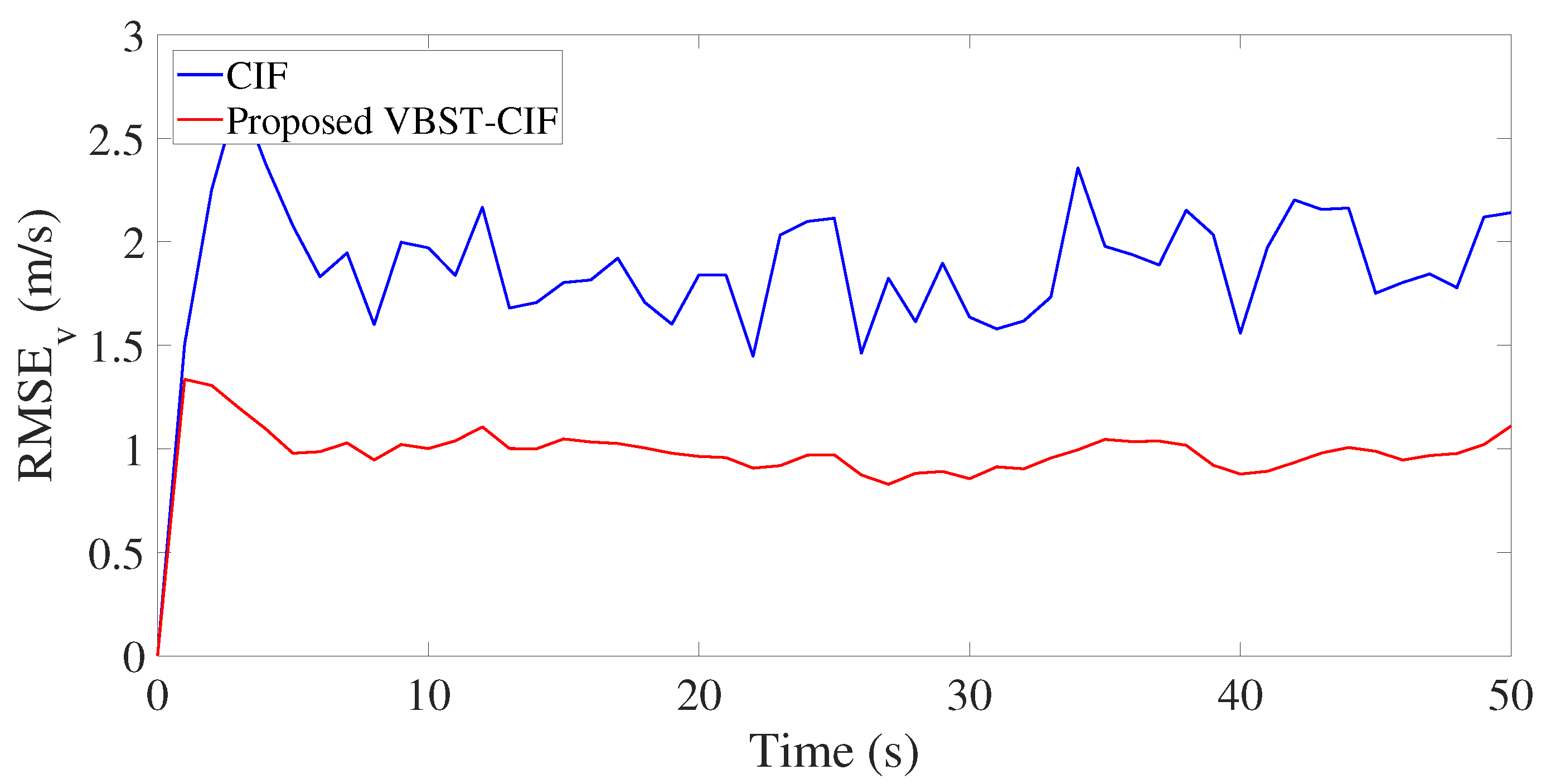
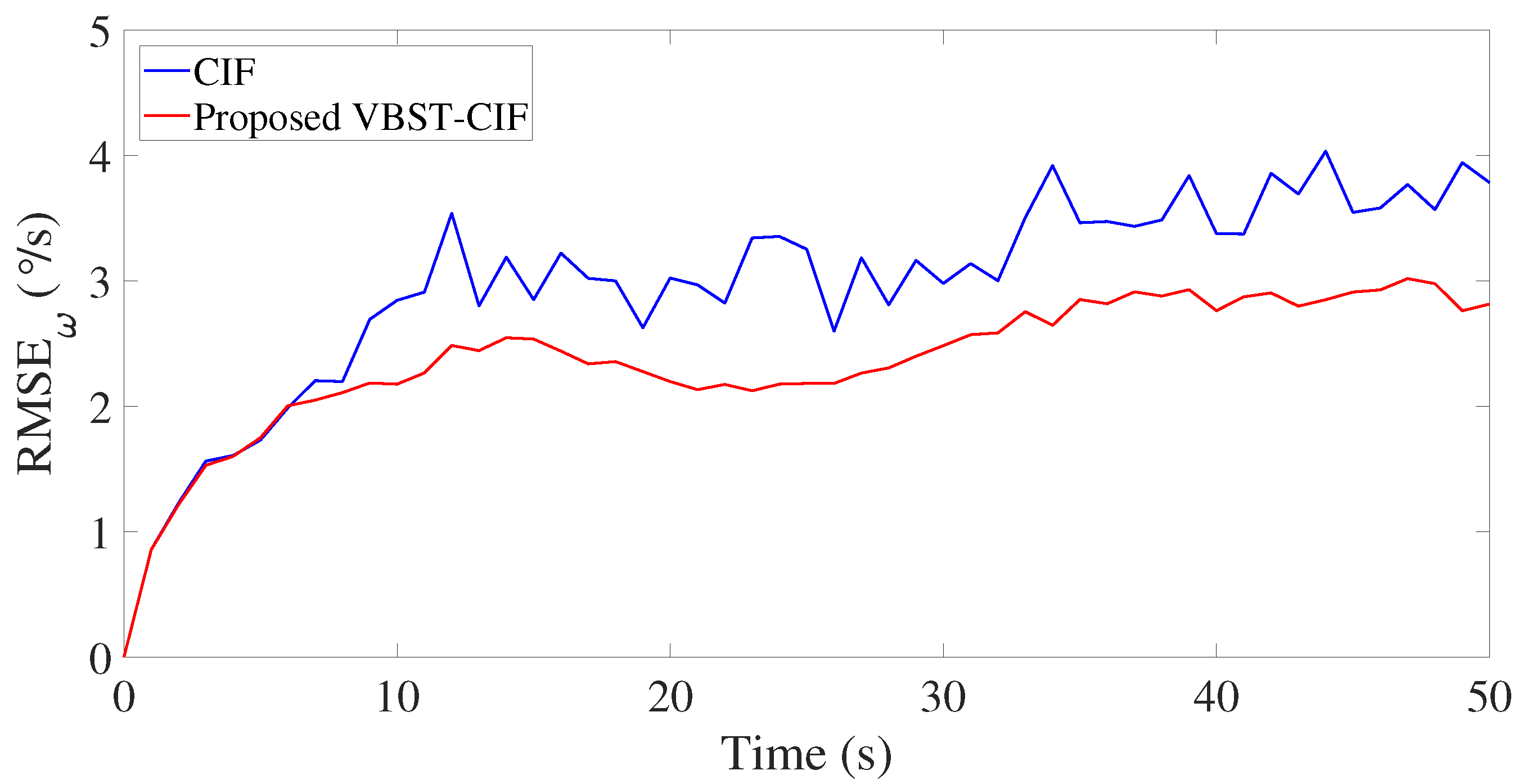
5.1. VBST-CIF Single-Sensor Target Tracking
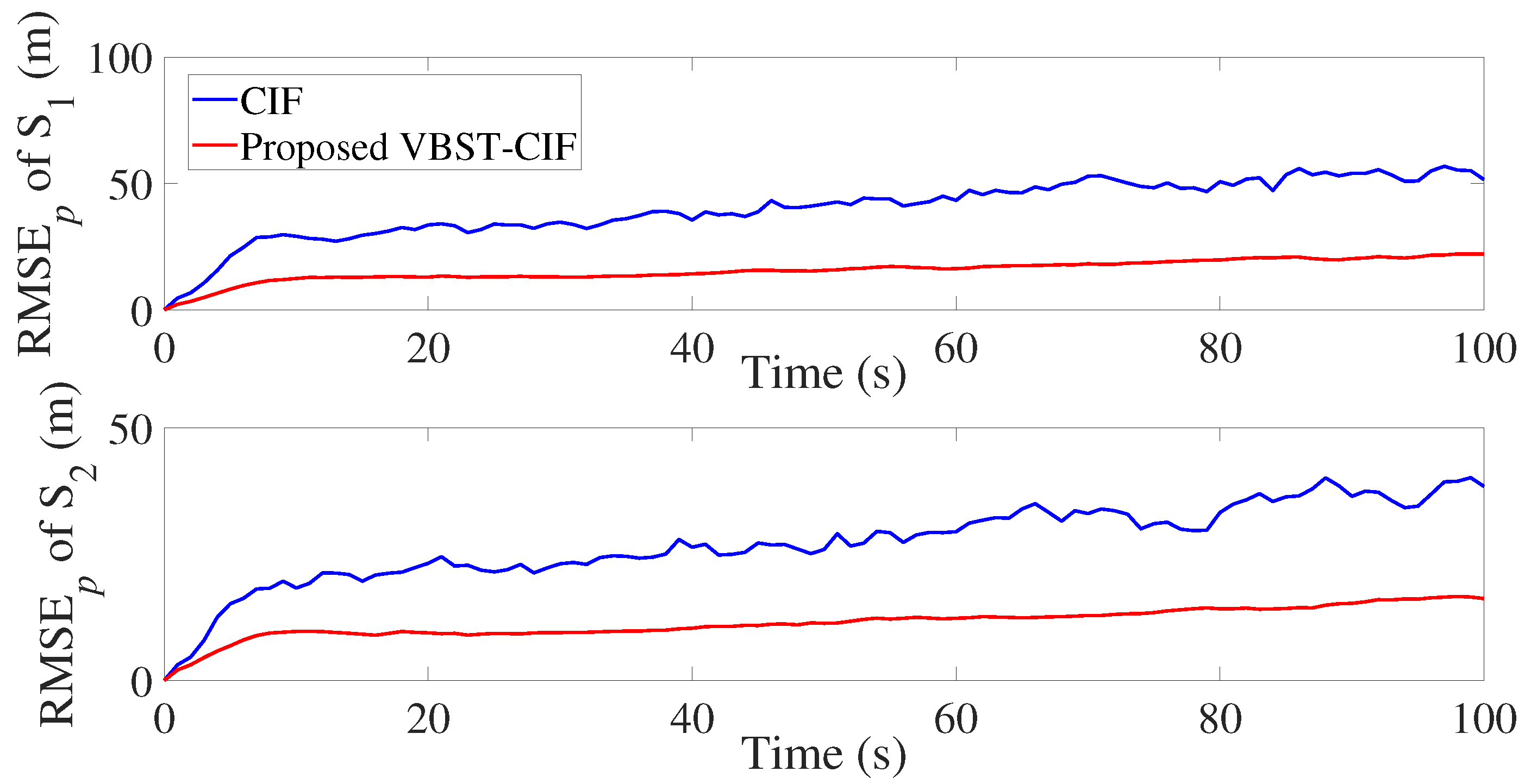
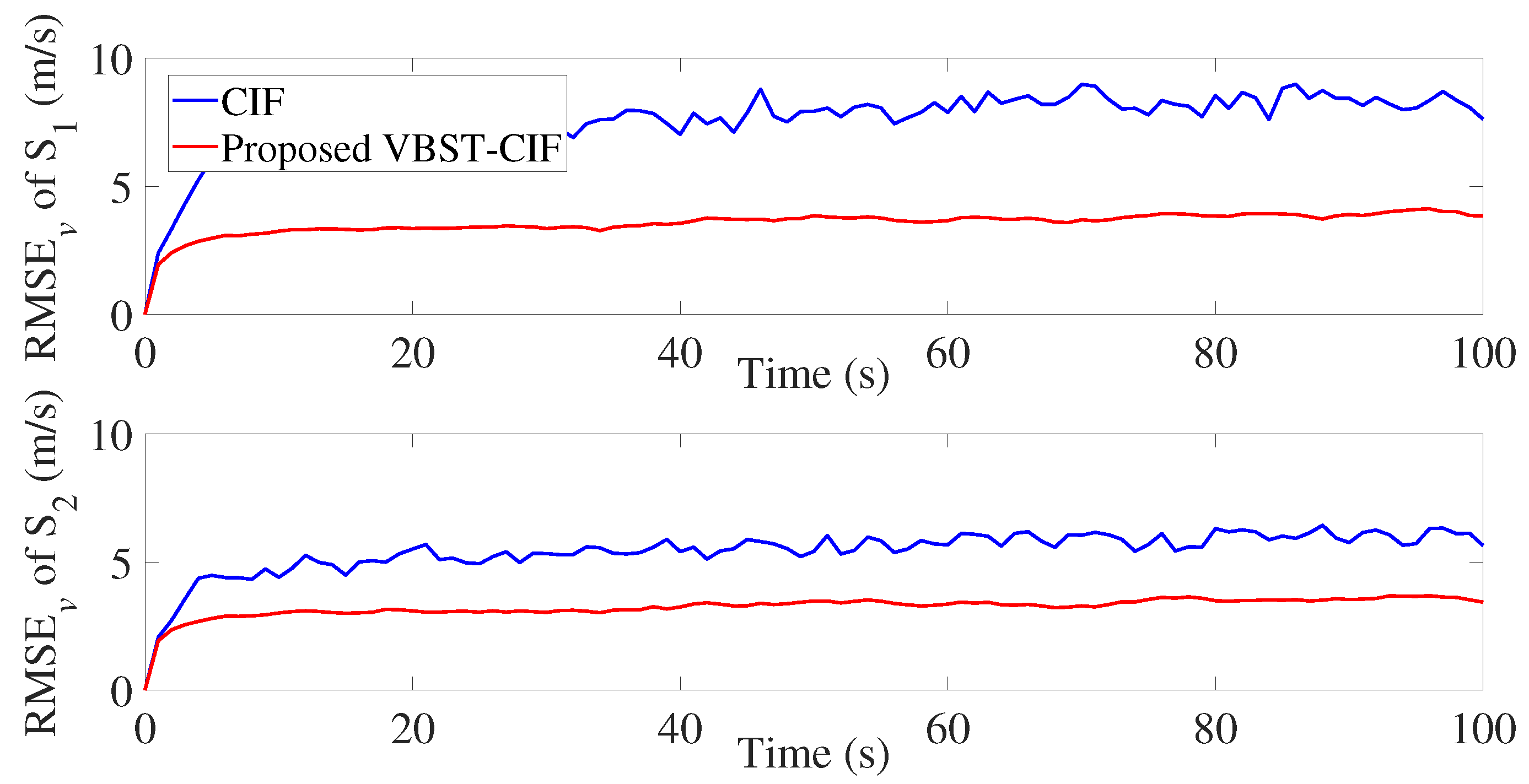
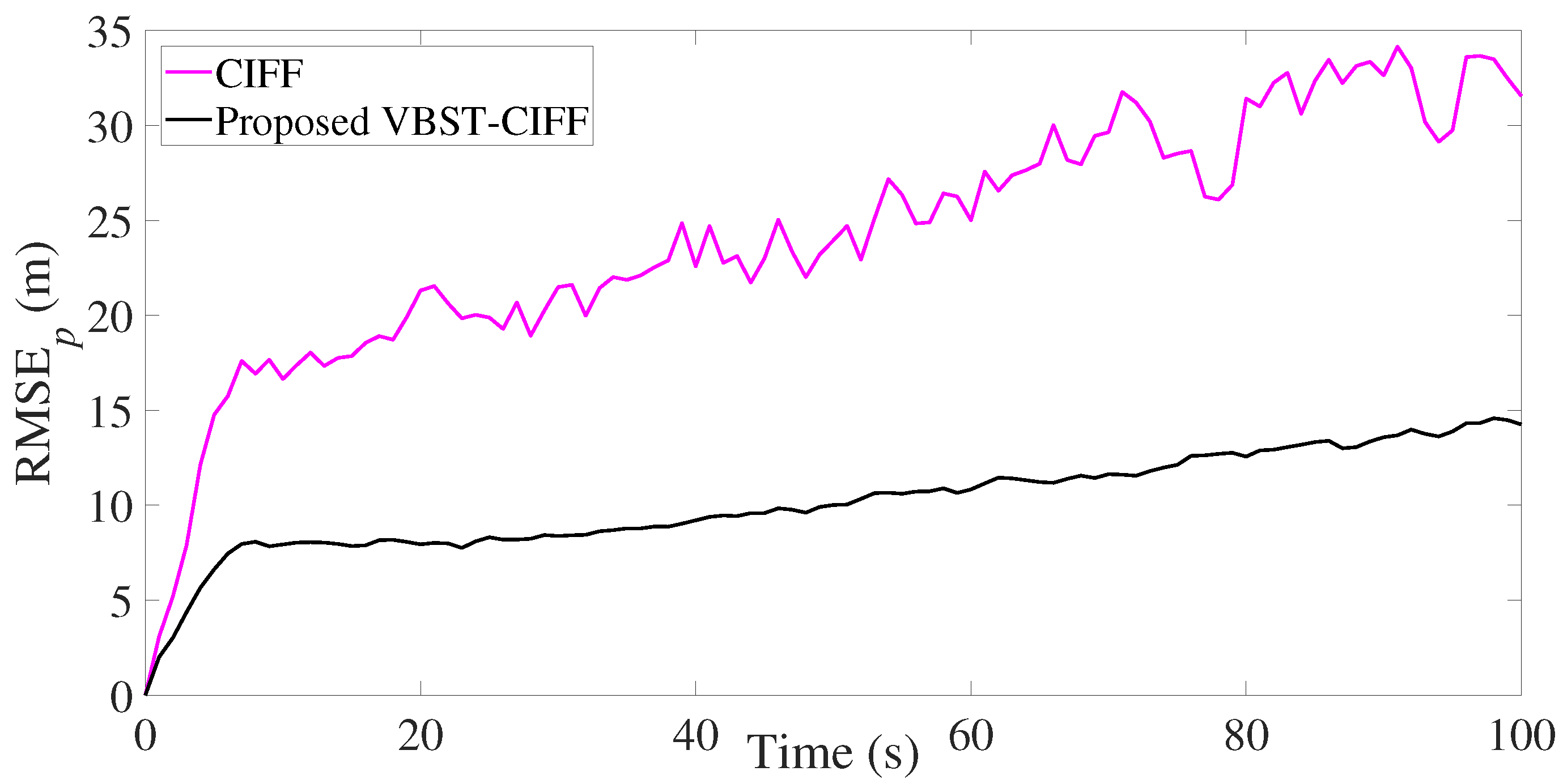
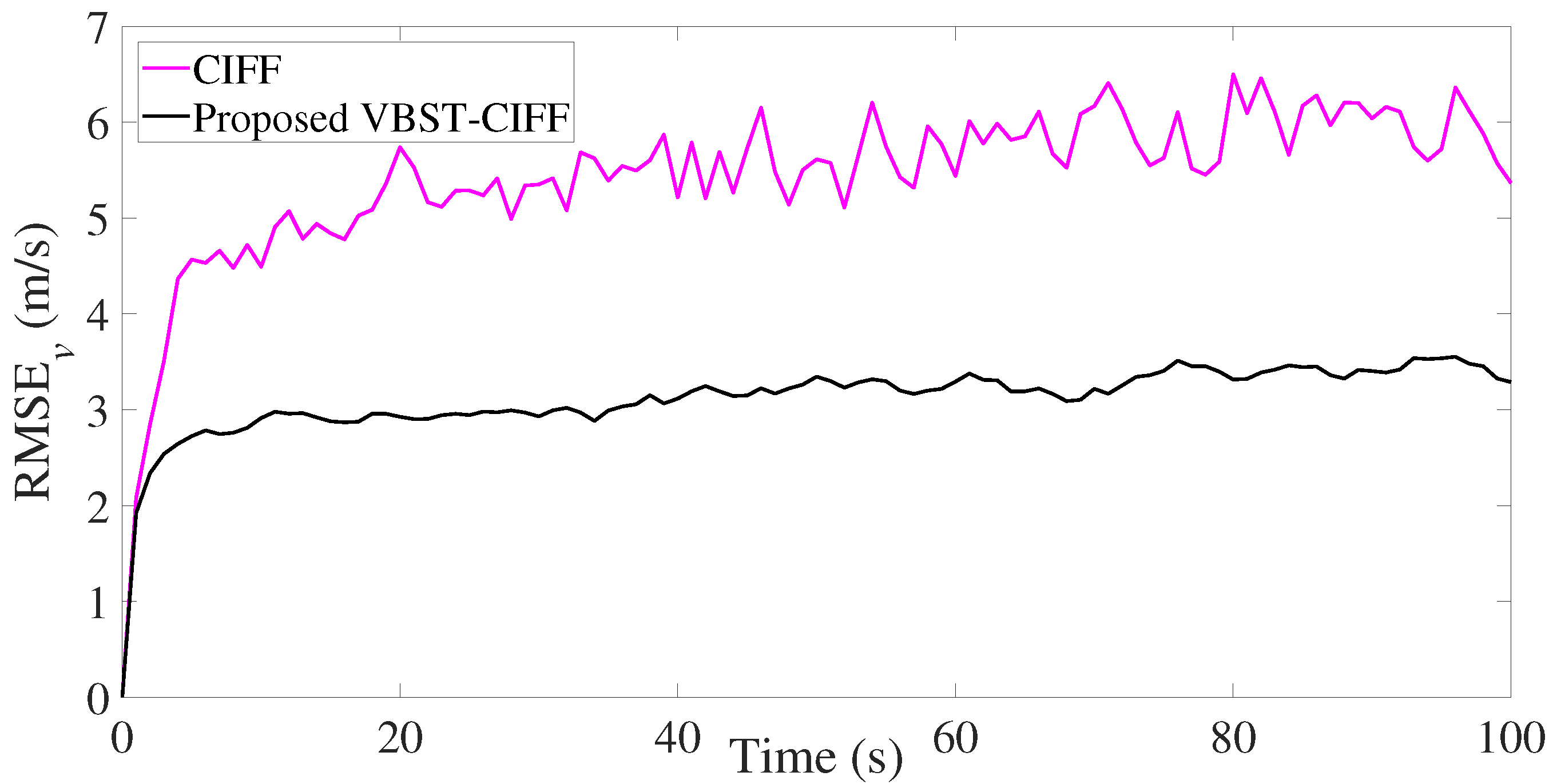
5.2. VBST-CIFF Multi-Sensor Target Tracking
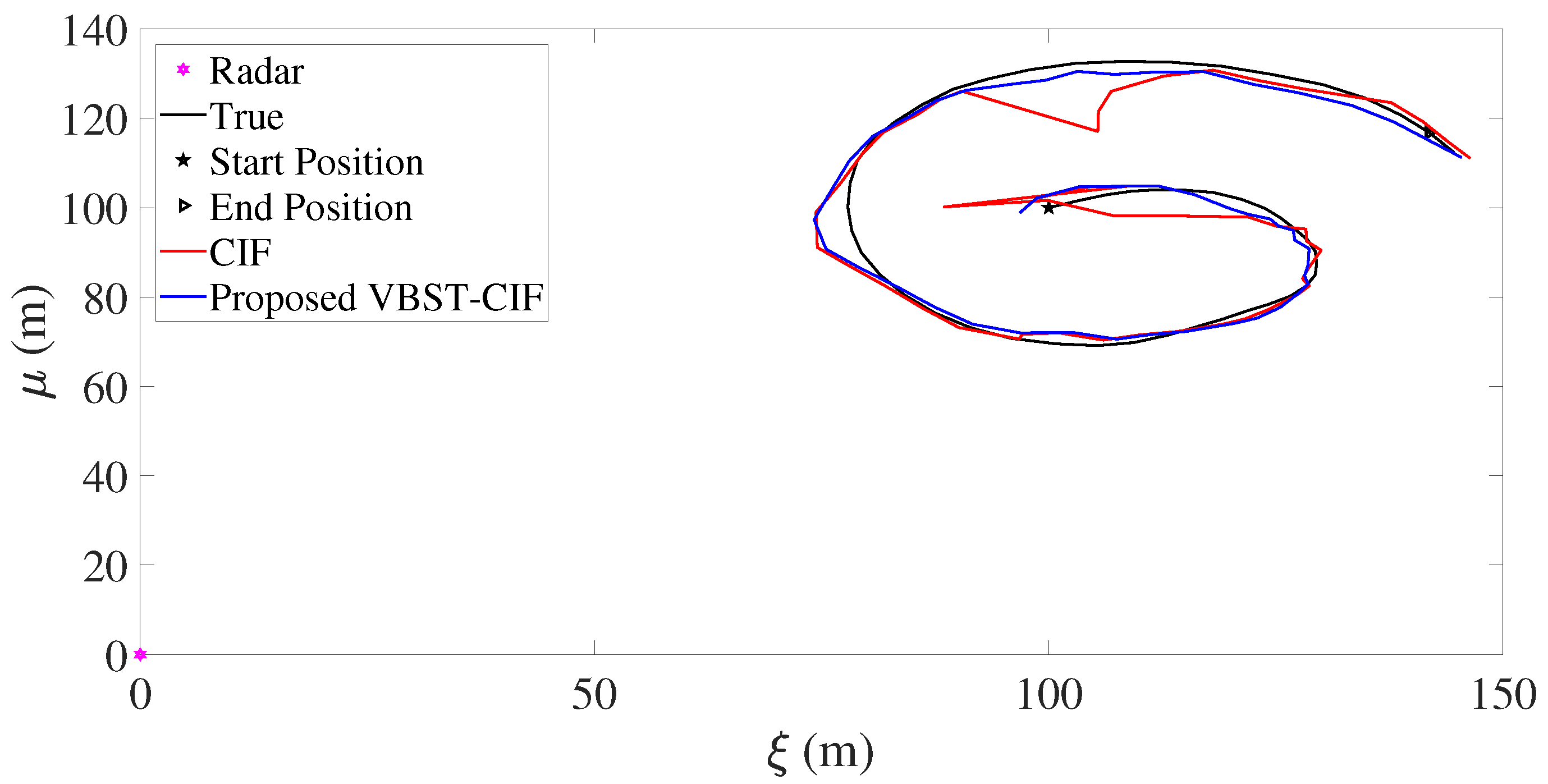
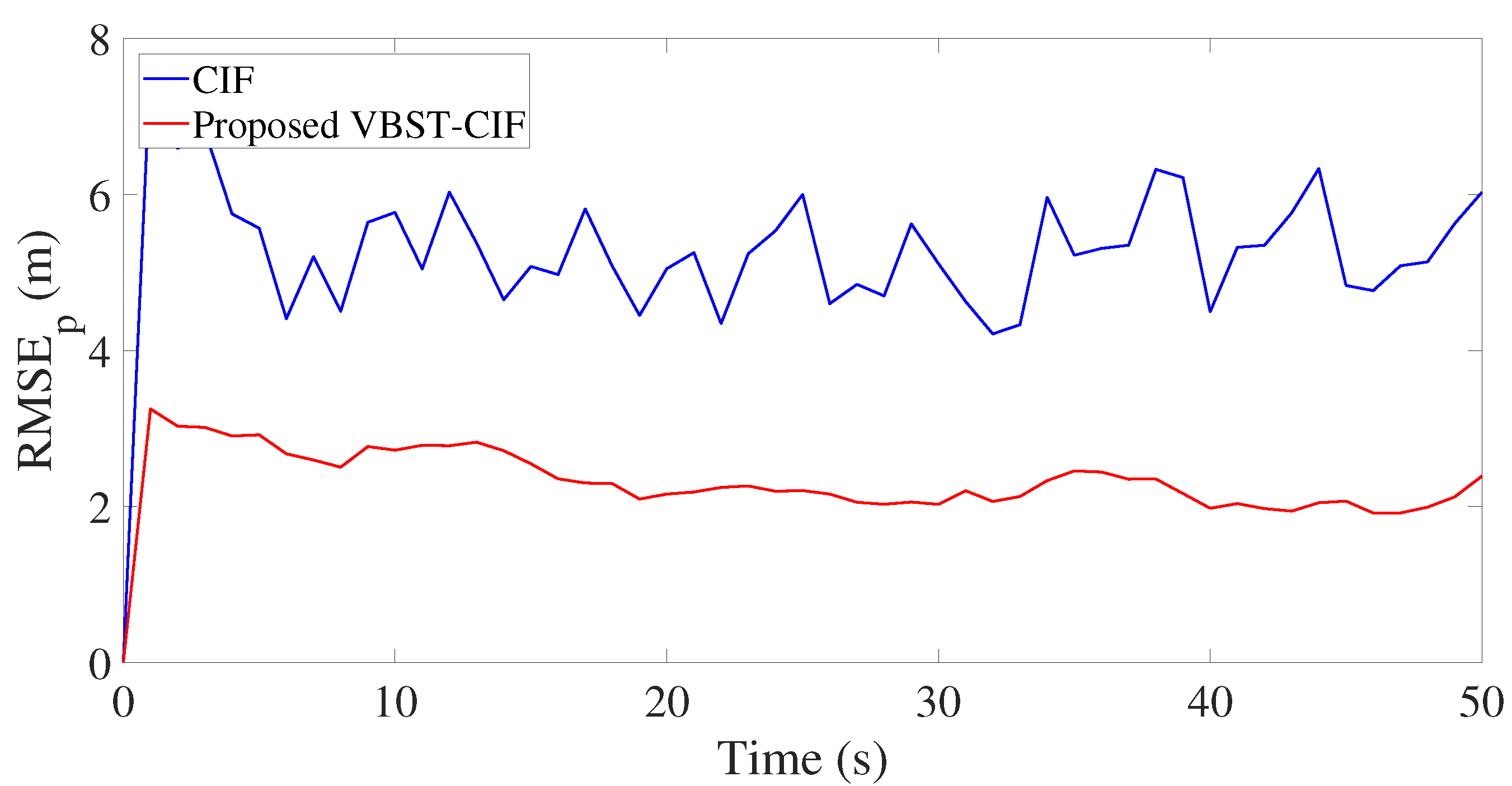
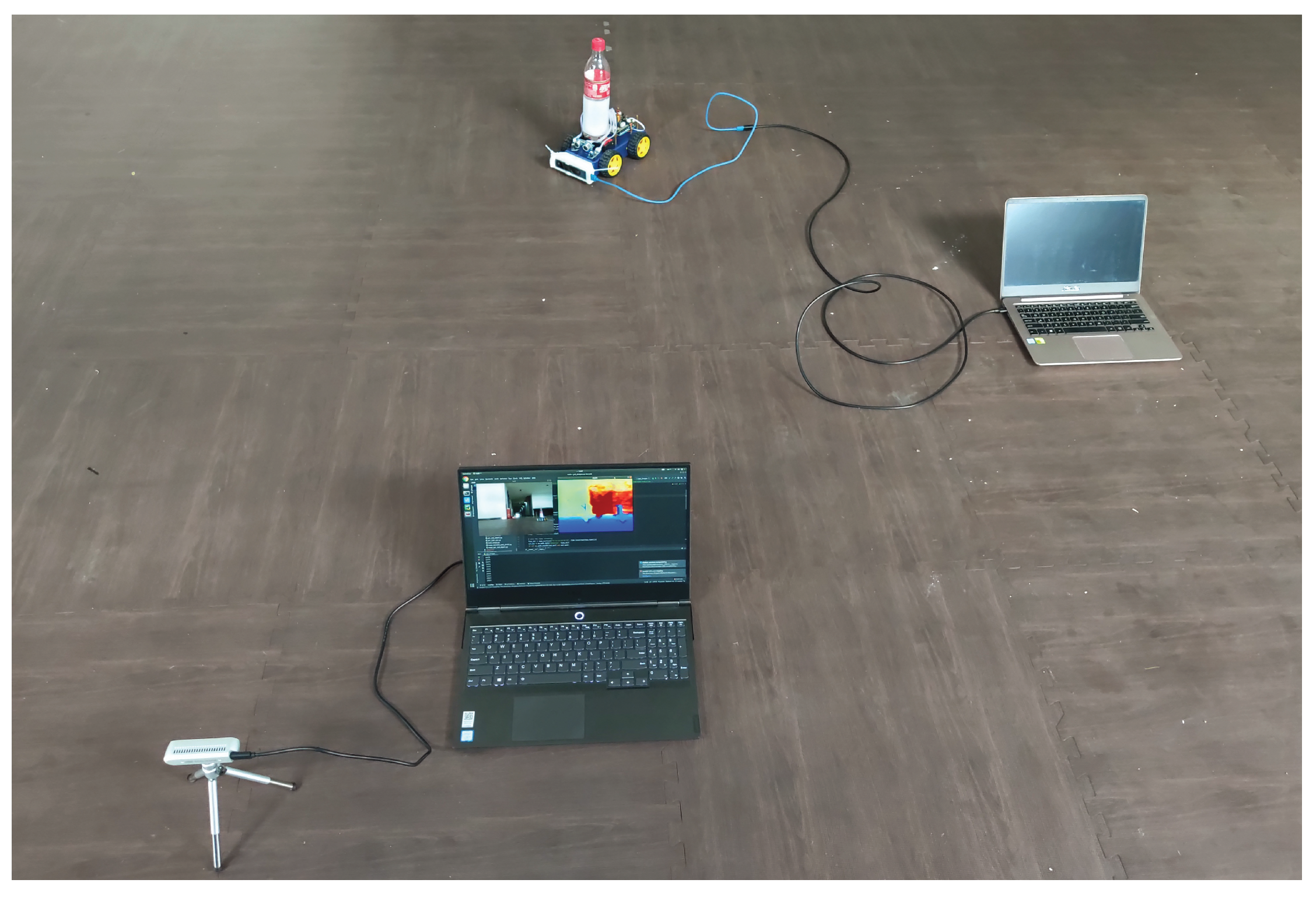
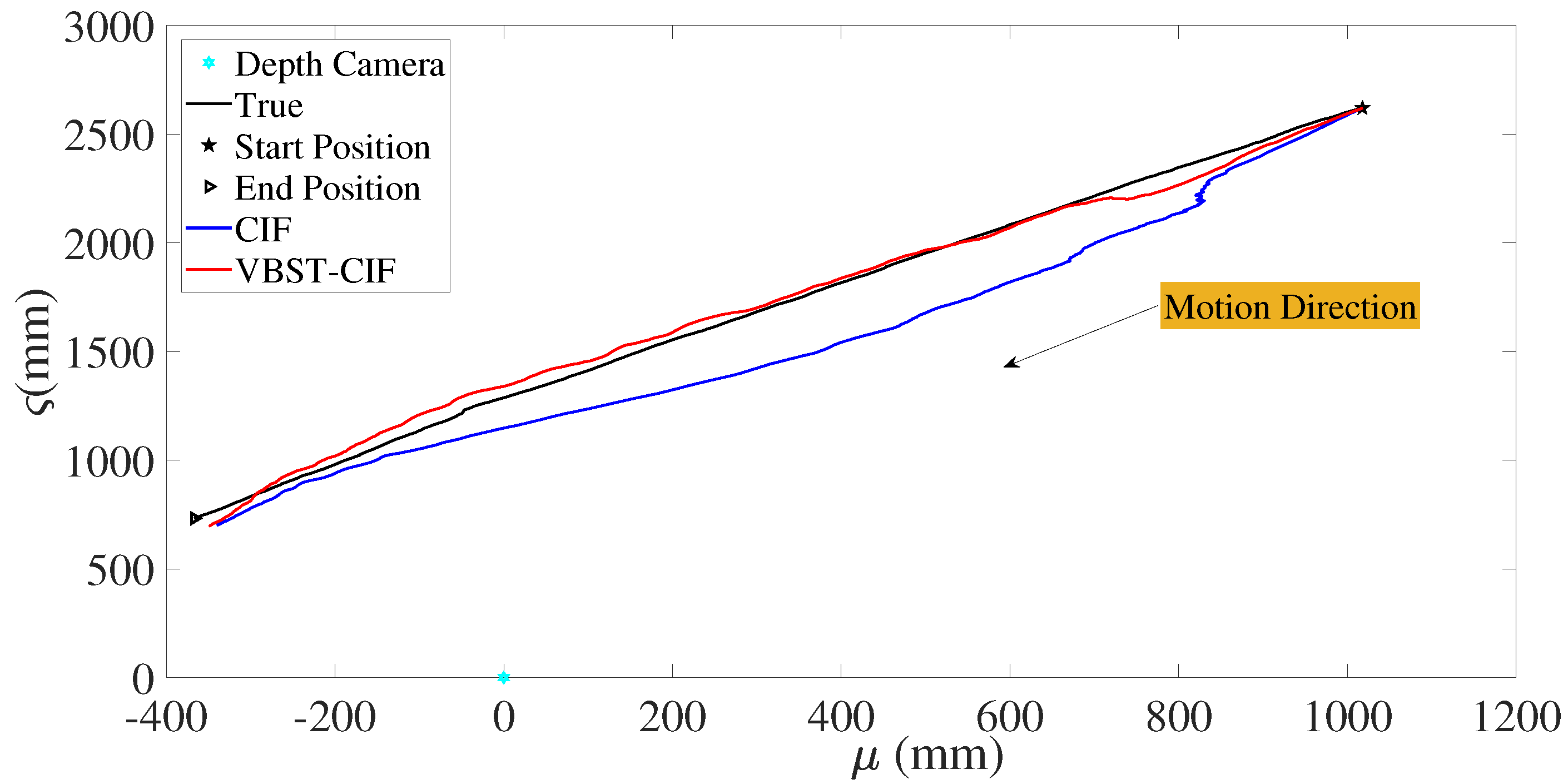
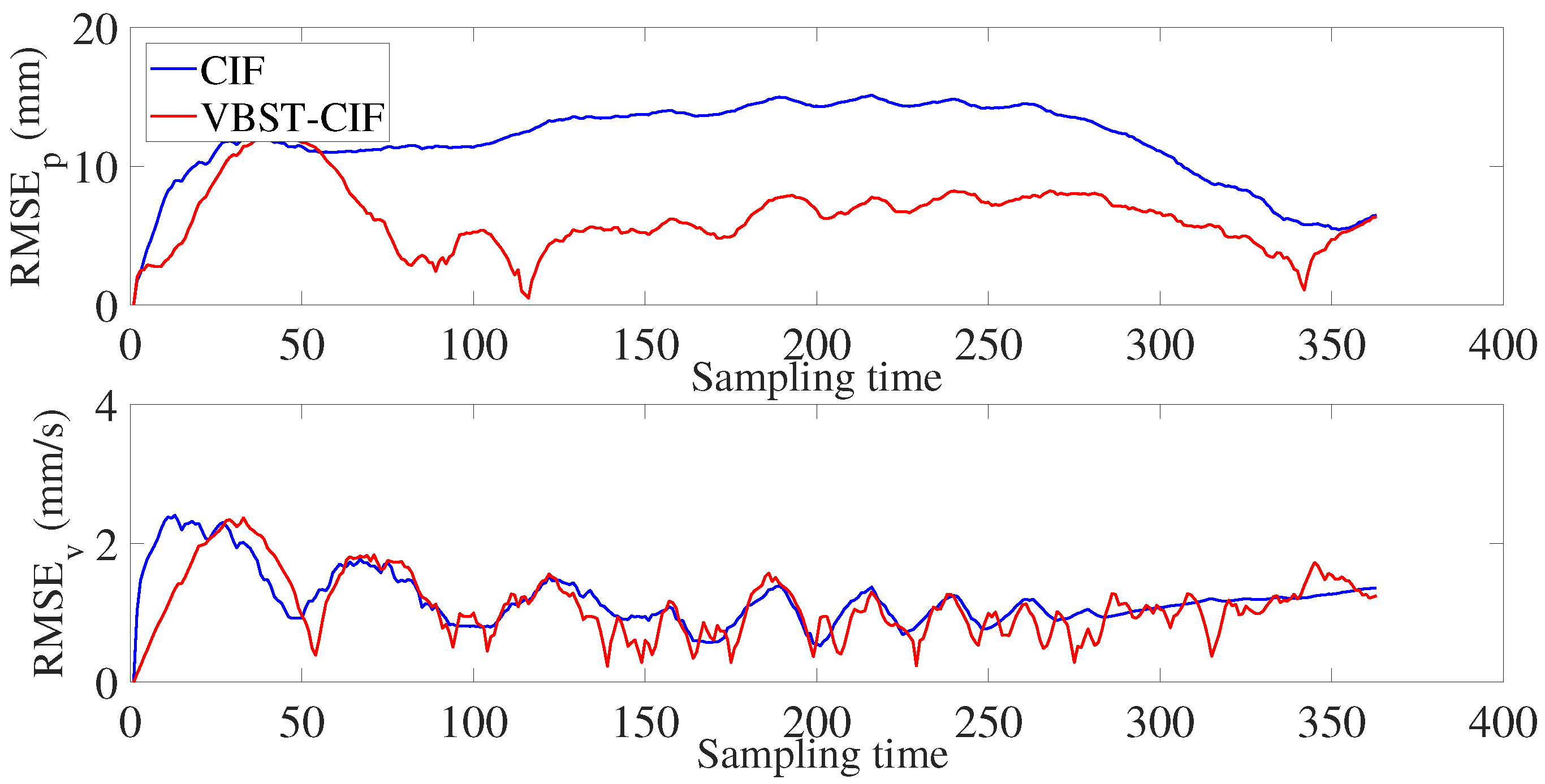
5.3. Experimental Case-Study
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME J. Basic Eng. 1960, 82, 34–45. [Google Scholar] [CrossRef]
- Tsyganova, J.V.; Kulikova, M.V. SVD-based Kalman filter derivative computation. IEEE Trans. Autom. Control 2017, 62, 4869–4875. [Google Scholar] [CrossRef]
- Lu, X.; Wang, L.; Wang, H.; Wang, X. Kalman filtering for delayed singular systems with multiplicative noise. IEEE/CAA J. Autom. Sin. 2016, 3, 51–58. [Google Scholar]
- Elliott, R.J. Filtering with uncertain noise. IEEE Trans. Autom. Control 2017, 62, 876–881. [Google Scholar] [CrossRef]
- Nurminen, H.; Ardeshiri, T.; Piché, R.; Gustafsson, F. Robust inference for state-space models with skewed measurement noise. IEEE Signal Process. Lett. 2015, 22, 1898–1902. [Google Scholar] [CrossRef]
- Liu, Q.; Luo, Z.; Huang, J.; Yan, S. A comparative study of four kinds of adaptive decomposition algorithms and their applications. Sensors 2018, 18, 2120. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Zhang, Y.; Wang, G.; Wang, X.; Li, N. Maximum correntropy based unscented particle filter for cooperative navigation with heavy-tailed measurement noises. Sensors 2018, 18, 10. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, S.; Wu, H.; He, R.; Hao, L. A Student’s t mixture probability hypothesis density filter for multi-target tracking with outliers. Sensors 2018, 18, 4. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Xu, L.; Yang, E. Highly computationally efficient state filter based on the delta operator. Int. J. Adapt. Control Signal Process. 2019, 33, 875–889. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Yang, E. State estimation for bilinear systems through minimizing the covariance matrix of the state estimation errors. Int. J. Adapt. Control Signal Process. 2019, 33, 1157–1173. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F. Recursive parameter estimation and its convergence for bilinear systems. IET Control Theory Appl. 2020, 14, 677–688. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F. Adaptive parameter estimation for a general dynamical system with unknown states. Int. J. Robust Nonlinear Control 2020, 30, 1351–1372. [Google Scholar] [CrossRef]
- Ding, F. Combined state and least squares parameter estimation algorithms for dynamic systems. Appl. Math. Model. 2014, 38, 403–412. [Google Scholar] [CrossRef]
- Ding, F. State filtering and parameter estimation for state space systems with scarce measurements. Signal Process. 2014, 104, 369–380. [Google Scholar] [CrossRef]
- Cao, Y.; Lu, H.; Wen, T. A safety computer system based on multi-sensor data processing. Sensors 2019, 19, 818. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.B.; Yang, N.X.; Wang, X.Y.; Bai, Y.T.; Kong, J.L. Hybrid deep learning predictor for smart agriculture sensing based on empirical mode decomposition and gated recurrent unit group model. Sensors 2020, 20, 1334. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.T.; Wang, X.Y.; Jin, X.B.; Zhao, Z.Y.; Zhang, B.H. A neuron-based Kalman filter with nonlinear autoregressive model. Sensors 2020, 20, 299. [Google Scholar] [CrossRef]
- Wang, J.; Wang, J.; Zhang, D.; Shao, X. Stochastic feedback based Kalman filter for nonlinear continuous-discrete systems. IEEE Trans. Autom. Control 2018, 63, 3002–3009. [Google Scholar] [CrossRef]
- Athans, M.; Wishner, R.; Bertolini, A. Suboptimal state estimation for continuous-time nonlinear systems from discrete noisy measurements. IEEE Trans. Autom. Control 1968, 13, 504–514. [Google Scholar] [CrossRef]
- Vemula, M.; Bugallo, M.F.; Djuric, P.M. Performance comparison of Gaussian-based filters using information measures. IEEE Signal Process. Lett. 2007, 14, 1020–1023. [Google Scholar] [CrossRef]
- Wang, X.; Yaz, E.E. Second-order fault tolerant extended Kalman filter for discrete time nonlinear systems. IEEE Trans. Autom. Control 2019, 64, 5086–5093. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Hou, C. UKF based nonlinear filtering using minimum entropy criterion. IEEE Trans. Signal Process. 2013, 61, 4988–4999. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Arasaratnam, I. Sensor fusion with square-root cubature information filtering. Intell. Control Autom. 2013, 4, 11–17. [Google Scholar] [CrossRef]
- Ge, Q.; Shao, T.; Yang, Q.; Shen, X.; Wen, C. Multisensor nonlinear fusion methods based on adaptive ensemble fifth-degree iterated cubature information filter for biomechatronics. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 912–925. [Google Scholar] [CrossRef]
- Dong, P.; Jing, Z.; Leung, H.; Shen, K. Variational Bayesian adaptive cubature information filter based on Wishart distribution. IEEE Trans. Autom. Control 2017, 62, 6051–6057. [Google Scholar] [CrossRef]
- Piché, R.; Särkkä, S.; Hartikainen, J. Recursive outlier-robust filtering and smoothing for nonlinear systems using the multivariate Student-t distribution. In Proceedings of the 2012 IEEE International Workshop on Machine Learning for Signal Processing, Santander, Spain, 23–26 September 2012; pp. 1–6. [Google Scholar]
- Lee, K.; Johnson, E.N. Robust outlier-adaptive filtering for vision-aided inertial navigation. Sensors 2020, 20, 2036. [Google Scholar] [CrossRef]
- Barkat, B.; Yingtuo, J.; Abed-Meraim, K. Detection of known FM signals in known heavy-tailed noise. In Proceedings of the 3rd IEEE International Symposium on Signal Processing and Information Technology, Darmstadt, Germany, 17 December 2003; pp. 130–133. [Google Scholar]
- Roth, M.; Özkan, E.; Gustafsson, F. A Student’s t filter for heavy tailed process and measurement noise. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, 26–31 May 2013; pp. 5770–5774. [Google Scholar]
- Kapoor, R.; Tsihrintzis, G.A.; Nandhakumar, N. Detection of obscured targets in heavy-tailed radar clutter using an ultra-wideband (UWB) radar and alpha-stable clutter models. In Proceedings of the Conference Record of The Thirtieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 1996; Volume 2, pp. 863–867. [Google Scholar]
- Huang, Y.; Zhang, Y.; Li, N.; Chambers, J. A robust Gaussian approximate filter for nonlinear systems with heavy tailed measurement noises. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 4209–4213. [Google Scholar]
- Taghavi, E.; Tharmarasa, R.; Kirubarajan, T.; Mcdonald, M. Multisensor-multitarget bearing-only sensor registration. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1654–1666. [Google Scholar] [CrossRef]
- Li, X.; Jilkov, V. Survey of maneuvering target tracking. Part V. multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Pan, Q.; Hu, Y.; Lan, H.; Sun, S.; Wang, Z.; Yang, F. Information fusion progress: Joint optimization based on variational Bayesian theory. Zidonghua Xuebao/Acta Autom. Sin. 2019, 45, 1207–1223. [Google Scholar]
- Wang, X.; Cui, N.; Guo, J. Huber-based unscented filtering and its application to vision-based relative navigation. IET Radar Sonar Nav. 2010, 4, 134–141. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Wu, Z.; Chambers, J.A. A novel robust Student’s t-based Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1545–1554. [Google Scholar] [CrossRef]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. An outlier-robust Kalman filter. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1551–1558. [Google Scholar]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. Approximate inference in state-space models with heavy-tailed noise. IEEE Trans. Signal Process. 2012, 60, 5024–5037. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Chambers, J. A robust Gaussian approximate fixed-interval smoother for nonlinear systems with heavy-tailed process and measurement noises. IEEE Signal Process. Lett. 2016, 23, 468–472. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Naqvi, M.; Chambers, J. A robust Student’s t based cubature filter. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 9–16. [Google Scholar]
- Chandra, K.; Gu, D.; Postlethwaite, I. Square root cubature information filter. IEEE Sens. J. 2013, 13, 750–758. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | |||
|---|---|---|---|
| CIF | 5.2364 | 1.8646 | 0.0518 |
| VBST-CIF | 2.3052 | 0.9740 | 0.0412 |
| Filter | Sensor | ||
|---|---|---|---|
| CIF | 1 | 40.1874 | 7.5373 |
| CIF | 2 | 27.1914 | 5.4180 |
| CIFF | Fusion | 24.1697 | 5.4225 |
| VBST-CIF | 1 | 15.5891 | 3.5502 |
| VBST-CIF | 2 | 11.4030 | 3.2353 |
| VBST-CIFF | Fusion | 10.1193 | 3.1117 |
| Filter | [mm] | [mm/s] |
|---|---|---|
| CIF | 11.7397 | 1.1985 |
| VBST-CIF | 6.3111 | 1.0991 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, X.; Chisci, L.; Cai, Y. An Adaptive Filter for Nonlinear Multi-Sensor Systems with Heavy-Tailed Noise. Sensors 2020, 20, 6757. https://doi.org/10.3390/s20236757
Dong X, Chisci L, Cai Y. An Adaptive Filter for Nonlinear Multi-Sensor Systems with Heavy-Tailed Noise. Sensors. 2020; 20(23):6757. https://doi.org/10.3390/s20236757
Chicago/Turabian StyleDong, Xiangxiang, Luigi Chisci, and Yunze Cai. 2020. "An Adaptive Filter for Nonlinear Multi-Sensor Systems with Heavy-Tailed Noise" Sensors 20, no. 23: 6757. https://doi.org/10.3390/s20236757
APA StyleDong, X., Chisci, L., & Cai, Y. (2020). An Adaptive Filter for Nonlinear Multi-Sensor Systems with Heavy-Tailed Noise. Sensors, 20(23), 6757. https://doi.org/10.3390/s20236757