Modeling and Design of a Rear-Mounted Underwater Projector Using Equivalent Circuits


Abstract
:1. Introduction
2. Analysis
2.1. Finite Element Model of a Rear-Mounted Tonpilz Projector
2.2. Distributed Equivalent Circuit Model
3. Results
3.1. Validation of Equivalent Circuit Models
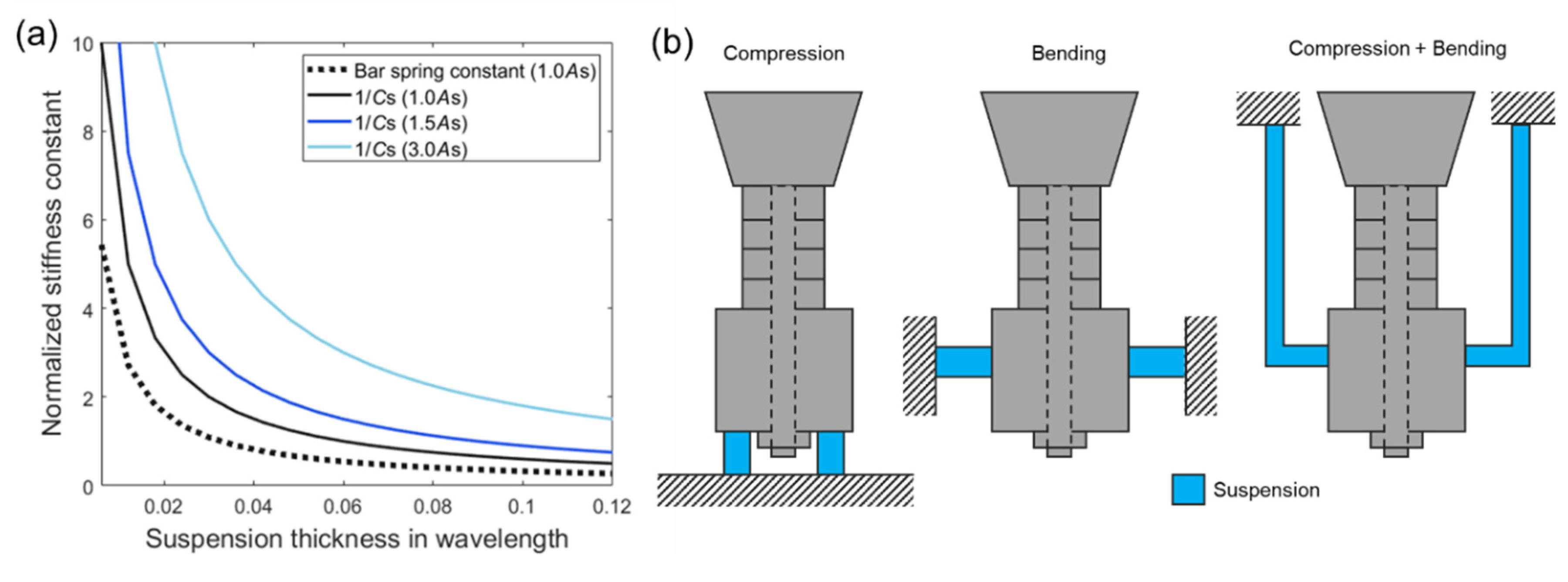
3.2. Suspension Thickness Variation
3.3. Tail Mass Thickness Variation
3.4. Head Mass Thickness Variation
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sherman, C.H.; Butler, J.L. Transducers and Arrays for Underwater Sound; Springer: New York, NY, USA, 2007; ISBN 0387329404. [Google Scholar]
- Butler, S.C. Triple-resonant transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1292–1300. [Google Scholar] [CrossRef]
- Sheehy, M.J.; Halley, R. Measurement of the Attenuation of Low-Frequency Underwater Sound. J. Acoust. Soc. Am. 1957, 29, 464–469. [Google Scholar] [CrossRef]
- Lee, J.; Seo, I.; Han, S.M. Radiation power estimation for sonar transducer arrays considering acoustic interaction. Sens. Actuators A Phys. 2001, 90, 1–6. [Google Scholar] [CrossRef]
- Noh, E.; Lee, H.; Chun, W.; Ohm, W.-S.; Been, K.; Moon, W.; Chang, W.; Yoon, H. Iterative solutions of the array equations for rapid design and analysis of large projector arrays. J. Acoust. Soc. Am. 2018, 144, 2434–2446. [Google Scholar] [CrossRef]
- Butler, J.L.; Cipolla, J.R.; Brown, W.D. Radiating head flexure and its effect on transducer performance. J. Acoust. Soc. Am. 1981, 70, 500–503. [Google Scholar] [CrossRef]
- Kim, J.; Kim, H.; Roh, Y. Design and fabrication of multi-mode wideband Tonpilz transducers. J. Acoust. Soc. Korea 2013, 32, 191–198. [Google Scholar] [CrossRef]
- Hawkins, D.W.; Gough, P.T. Multiresonance design of a tonpilz transducer using the finite element method. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1996, 43, 782–790. [Google Scholar] [CrossRef]
- Yao, Q.; Bjgrng, L. Band Tonpilz Underwater Acoustic ultimode Optimization. Society 1997, 44, 1060–1066. [Google Scholar]
- Saijyou, K.; Okuyama, T. Design optimization of wide-band Tonpilz piezoelectric transducer with a bending piezoelectric disk on the radiation surface. J. Acoust. Soc. Am. 2010, 127, 2836–2846. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Roh, Y. Design and fabrication of a wideband Tonpilz transducer with a void head mass. Sens. Actuators A Phys. 2016, 239, 137–143. [Google Scholar] [CrossRef]
- Chhith, S.; Roh, Y. Wideband tonpilz transducer with a cavity inside a head mass. Jpn. J. Appl. Phys. 2010, 49, 07HG08. [Google Scholar] [CrossRef]
- Kim, J.-W.; Kim, W.-H.; Joh, C.-Y.; Roh, Y.-R. A Study on the Resonant Characteristics of a Tonpilz Transducer with a Fixed Tail Mass. J. Acoust. Soc. Korea 2010, 29, 439–447. [Google Scholar]
- Kim, J.-W.; Kim, W.-H.; Joh, C.-Y.; Roh, Y.-R. Analysis of the resonant characteristics of a tonpilz transducer with a fixed tail mass by the equivalent circuit approach. J. Acoust. Soc. Korea 2011, 30, 344–352. [Google Scholar] [CrossRef]
- Kurt, P.; Şansal, M.; Tatar, İ.; Duran, C.; Orhan, S. Vibro-acoustic design, manufacturing and characterization of a tonpilz-type transducer. Appl. Acoust. 2019, 150, 27–35. [Google Scholar] [CrossRef]
- Afzal, M.S.; Lim, Y.; Lee, S.; Yoon, H.; Roh, Y. Optimization and characterization of a wideband multimode Tonpilz transducer for underwater acoustical arrays. Sens. Actuators A Phys. 2020, 307, 112001. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Parametric study of bolt clamping effect on resonance characteristics of langevin transducers with lumped circuit models. Sensors 2020, 20, 1952. [Google Scholar] [CrossRef] [Green Version]
- Sherrit, S.; Leary, S.P.; Dolgin, B.P.; Bar-Cohen, Y. Comparison of the Mason and KLM equivalent circuits for piezoelectric resonators in the thickness mode. IEEE Ultrason. Symp. Proc. Int. Symp. 1999, 2, 921–926. [Google Scholar] [CrossRef] [Green Version]
- Lin, S.; Xu, J. Effect of the matching circuit on the electromechanical characteristics of sandwiched piezoelectric transducers. Sensors 2017, 17, 329. [Google Scholar] [CrossRef]
- Zhang, J.G.; Long, Z.L.; Ma, W.J.; Hu, G.H.; Li, Y.M. Electromechanical dynamics model of ultrasonic transducer in ultrasonic machining based on equivalent circuit approach. Sensors 2019, 19, 1405. [Google Scholar] [CrossRef] [Green Version]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Snaders, J.V. Fundamentals of Acoustics, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Andersen, K.K.; Frijlink, M.E.; Johansen, T.F.; Hoff, L. A Dual-frequency Coupled Resonator Transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 2119–2129. [Google Scholar] [CrossRef]
- Kim, J.; Li, S.; Kasoji, S.; Dayton, P.A.; Jiang, X. Phantom evaluation of stacked-type dual-frequency 1–3 composite transducers: A feasibility study on intracavitary acoustic angiography. Ultrasonics 2015, 63, 7–15. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Cha, J.H.; Huang, Y.; Zhang, R.; Cao, W.; Shung, K.K. Alumina/epoxy nanocomposite matching layers for high-frequency ultrasound transducer application. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 213–219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Ritter, T.A.; Cao, W.; Shung, K.K. High frequency properties of passive materials for ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 78–84. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Lin, S. Analysis of a cascaded piezoelectric ultrasonic transducer with three sets of piezoelectric ceramic stacks. Sensors 2019, 19, 580. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Suspension | Tail Mass | Piezoceramic | Head Mass |
|---|---|---|---|---|
| Material | Epoxy composite | Stainless steel | PZT-4 | Aluminum |
| ρ (kg/m3) | 2000 | 7700 | 7500 | 2700 |
| E (GPa) | 7.93 | 195 | - | 69 |
| υ | 0.38 | 0.28 | - | 0.33 |
| (GPa) | - | - | 139, 74.3, 115 | - |
| e31, e33 (C/m2) | - | - | −5.2, 15.1 | - |
| - | - | 635 | - | |
| thickness t (λ) | 0.065 (ts) | 0.092 (tt) | 0.087 (tpz) | 0.043 (th) |
| Piezoceramic Elements | |||
| Distributed impedance | |||
| Distributed impedance | |||
| Clamped capacitance | |||
| Electromechanical coupling coefficient | |||
| Electromechanical turning ratio | |||
| Wave speed (m/s) | |||
| Motional capacitance (C) | |||
| Mass (kg) | |||
| Suspension | Tail Mass | Head Mass | |
| Mechanical impedance | |||
| Distributed impedance | |||
| Distributed impedance | |||
| Wave speed (m/s) | |||
| Motional capacitance (C) | - | - | |
| Mass (kg) | |||
| Radiation impedance | - | - | |
| Radiation resistance | - | - | |
| Radiation mass | - | - | |
| Combined Circuit Elements | |||
| Equivalent impedance | |||
| Equivalent impedance | |||
| Component | Suspension | Tail Mass | Head Mass |
|---|---|---|---|
| Thickness (the calculated range) | 0.007 (0.007–0.12) | 0.028 (0.01–0.17) | 0.077 (0.004–0.077) |
| f1/f2 | 0.44 | 0.3 | 0.36 |
| ∆TVR (dB) | 9.0 | 21.2 | 21.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Roh, Y. Modeling and Design of a Rear-Mounted Underwater Projector Using Equivalent Circuits. Sensors 2020, 20, 7085. https://doi.org/10.3390/s20247085
Kim J, Roh Y. Modeling and Design of a Rear-Mounted Underwater Projector Using Equivalent Circuits. Sensors. 2020; 20(24):7085. https://doi.org/10.3390/s20247085
Chicago/Turabian StyleKim, Jinwook, and Yongrae Roh. 2020. "Modeling and Design of a Rear-Mounted Underwater Projector Using Equivalent Circuits" Sensors 20, no. 24: 7085. https://doi.org/10.3390/s20247085