A Novel Experiment-Free Site-Specific TDoA Localization Performance-Evaluation Approach

 , ,
, ,
Abstract
:1. Introduction
- For an area with a complicated environment, deterministic information of the wave propagation between the source to be located and the sensors is able to be extracted using the radio propagation graph. The wave propagation information offers an emulator of signals propagating in the area consistent with experimental measurements;
- The performance evaluation for a practical TDoA localization system can be made in a laboratory without making experimental trials in a realistic area. The performances of different localization systems can be fairly compared in a cost-efficient way and in a “blind” mode, which implies that a system under test is considered as a black box without prior knowledge of any detail regarding its workflow;
- Based on the results of wave propagation information for an area, statistical performance analysis of the system under test can be made in terms of localization errors. A root mean square and a Cumulative Distribution Function (CDF) of localization errors are obtained for a source to be located. Moreover, a geographical distribution of localization errors versus source locations for the area is presented. Especially, this kind of geographical distribution is beneficial to the deployment of multiple sensors for the system under test in the area;
- In order to transmit radio signals synchronously to the localization system under test, the multi-link hardware-in-loop structure with accurate time synchronization among devices is utilized for the first time in the performance evaluation.
2. Related Work
2.1. Using Simulations
2.2. Considering Experimental Validation
2.3. Using Combinations of Simulations and Experimental Validation
3. Approach Architecture
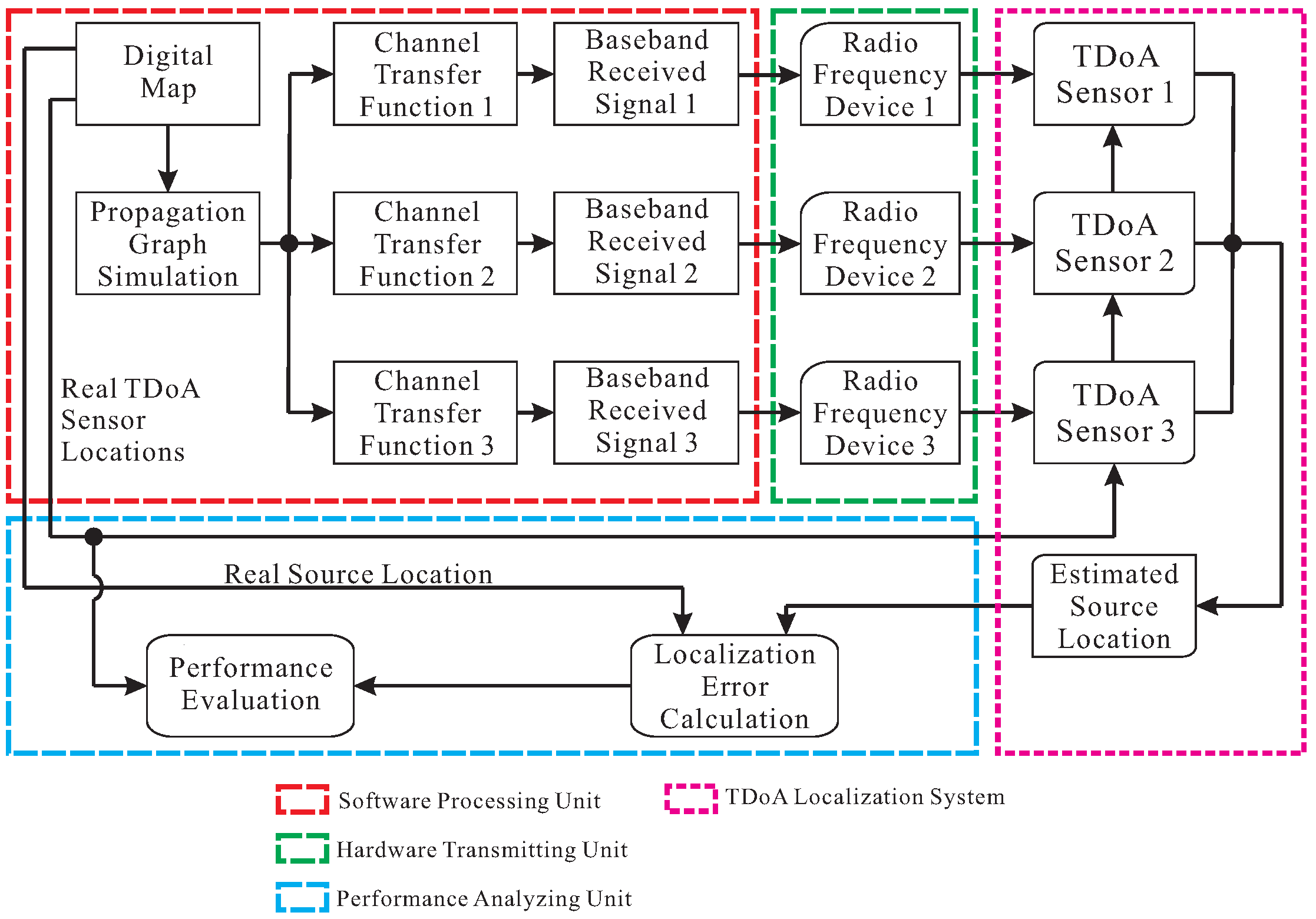
3.1. General Structure
3.2. The Software Processing Unit
3.2.1. Generation of Multi-Link Propagation Channels
3.2.2. Generation of Multi-Link Received Signals
3.3. Hardware Transmitting Unit
3.3.1. Construction Structure
3.3.2. Time-Stamp-Based Technique and Synchronization Implementation
- The 1PPS signal is utilized to establish a common time basis for all the three USRPs. Synchronously with a 1PPS pulse, the origin of the time basis for all the USRPs is established, i.e., all the USRPs are synchronized with a 1PPS pulse at the time . This common time basis will be used in all subsequent steps to perform operations in a synchronous way among different USRPs.
- Set the carrier frequency and the transmitting sampling rate at the time instant and for all the USRPs, respectively.
- A memory buffer is created for each USRP in the memory of the computer to store the data samples to be sent by each USRP during a specific time period.
- The data samples are temporarily copied into the memory buffers. A time stamp is built for the data in each buffer, i.e., “Time Stamp 1”, “Time Stamp 2” and “Time Stamp 3” in Figure 4, in order to determine the exact time instant at which the transmission starts. Then a data packet is constructed including all the buffers.
- The first data packet starts to be transmitted at the time instant . In other words, the three time stamps are set identical and equal to for the first data packet. The radio signal is transmitted continuously by setting the sending time of the subsequent data packets properly, i.e., there is no time spacing between two adjacent data packets. Note that , and are not necessarily integer times of one second. , and are set as 4, 2 and 14 seconds, respectively, in practice for our case.
3.4. Performance Analyzing Unit
3.4.1. Localization Error Calculation
3.4.2. Statistical Performance Evaluation
4. Performance Evaluation for Time Synchronization
5. Propagation Graph Verification
5.1. Propagation Graph Implementation
5.2. TDoA Localization Algorithm Implementation
6. Performance-Evaluation Approach Verification
6.1. Verification for LoS and NLoS Scenarios
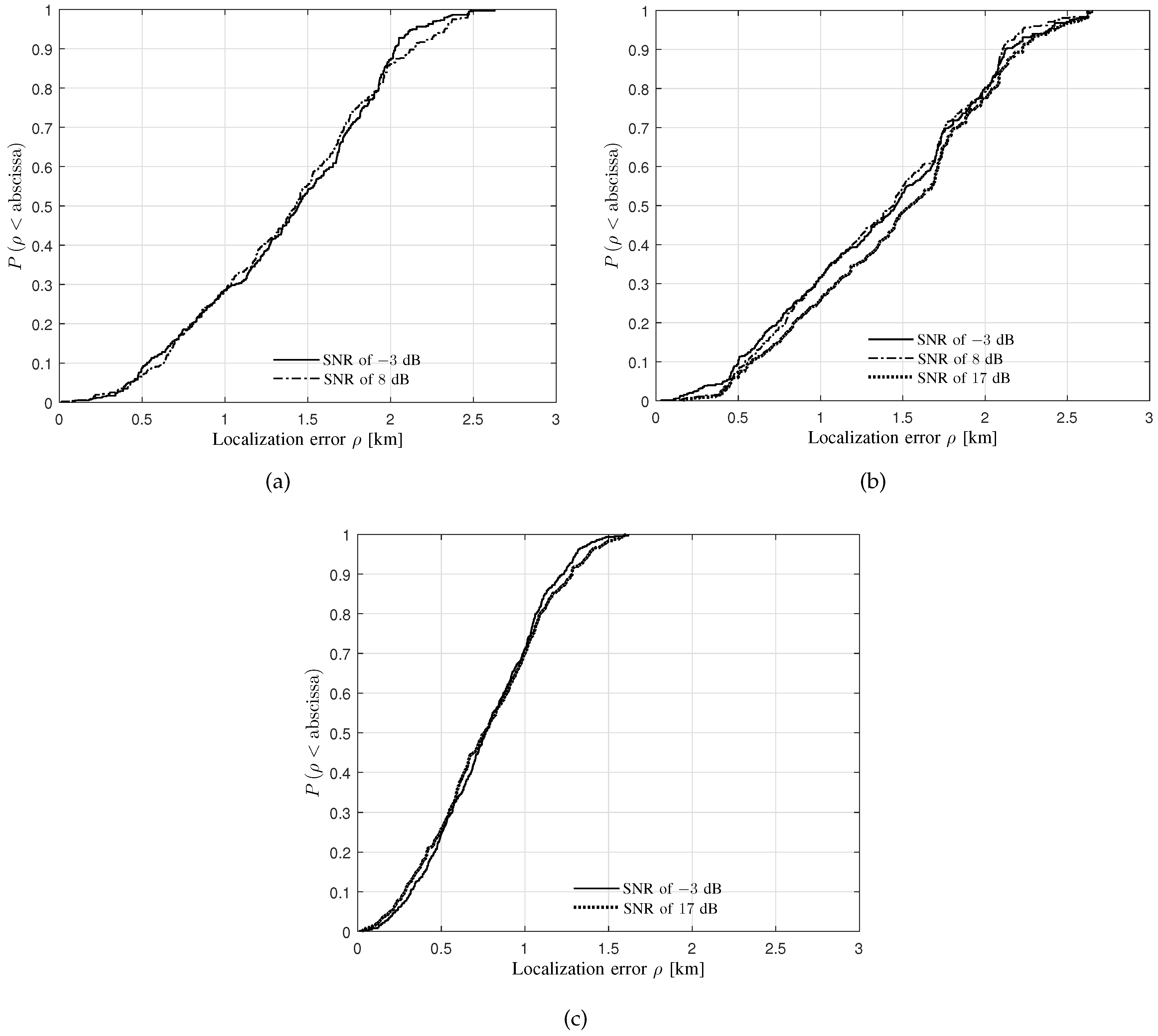
- It can be observed from Figure 9a,b that, with respect to all the four levels of SNRs, the median localization errors are less than km for both BWs of 5 and 25 KHz. Moreover, samples own the localization error of less than 4 km with respect to all the levels of SNRs for both BWs of 5 and 25 KHz.
- It can be observed from Figure 9b that the median localization error increases with the SNR decreasing.
- In Figure 9c, the median localization error for the BW of 3125 KHz is less than km, which is much less than that for both BWs of 5 and 25 KHz. This reasonably occurs due to a larger BW providing a higher resolution for distinguishing two close wave paths, and therefore the localization system can utilize the multi-paths more accurately.
- Some cases of the CDFs do not exist, e.g., the SNRs of 8, 30 dB for the BW of 3125 KHz. Since the system may locate the source according to the larger delays of the DS paths caused by the ground scatterers rather than the LoS paths due to the time synchronization errors, a large localization error causes the system to stop outputting the source location estimates.
- The median localization errors are respectively less than , and 1 km for the BWs of 5, 25 and 3125 KHz with respect to all the specific levels of SNRs. Moreover, samples own the localization errors of less than , and km for the BWs of 5, 25, and 3125 KHz, respectively, with respect to all the specific levels of SNRs.
- Some cases of the CDFs do not exist, e.g., the SNRs of 8, 30 dB for the BW of 3125 KHz. No output of the source location estimates can be a reminder of the system deployment, i.e., the TDoA sensors to the greatest extent are configured in an LoS environment instead of a complicated NLoS one.
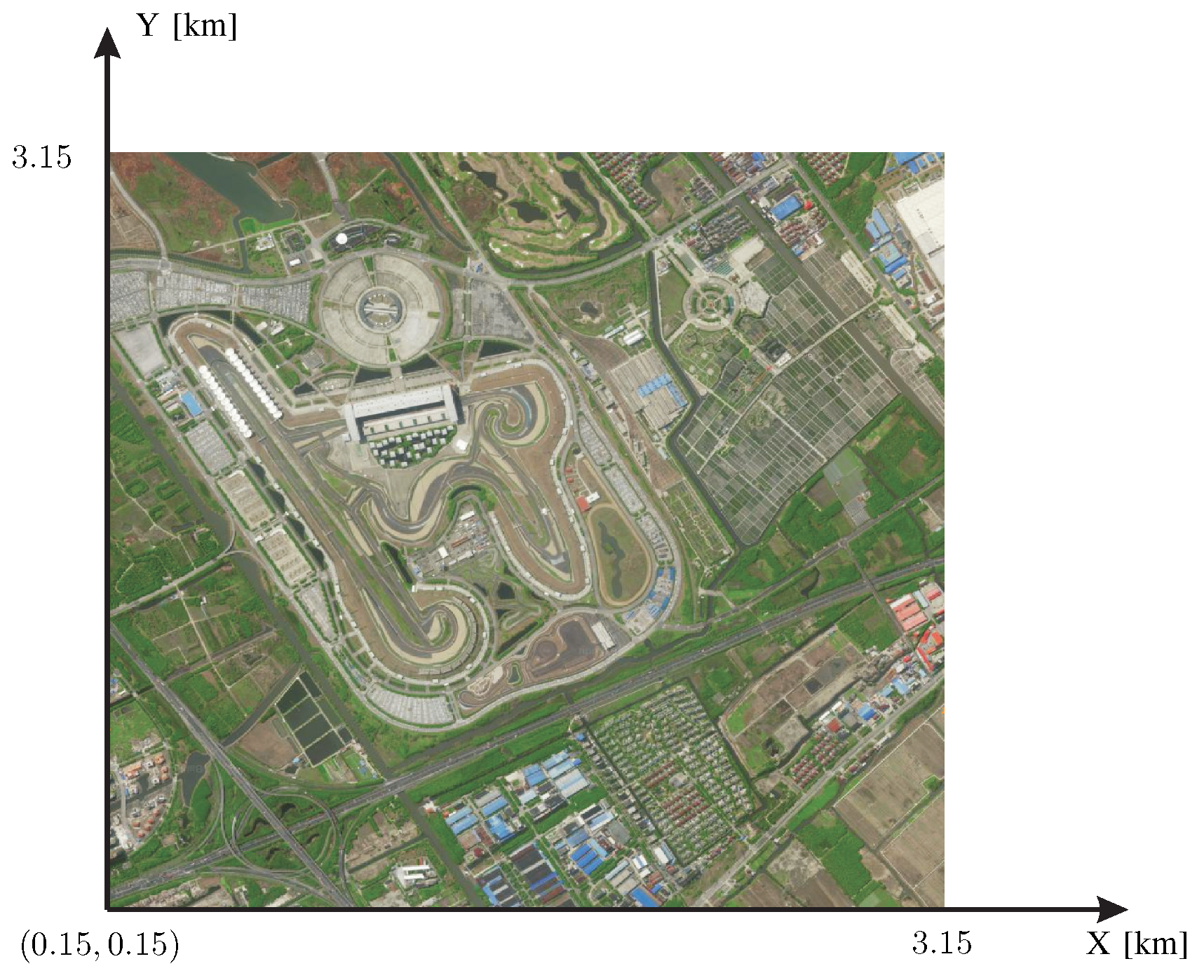
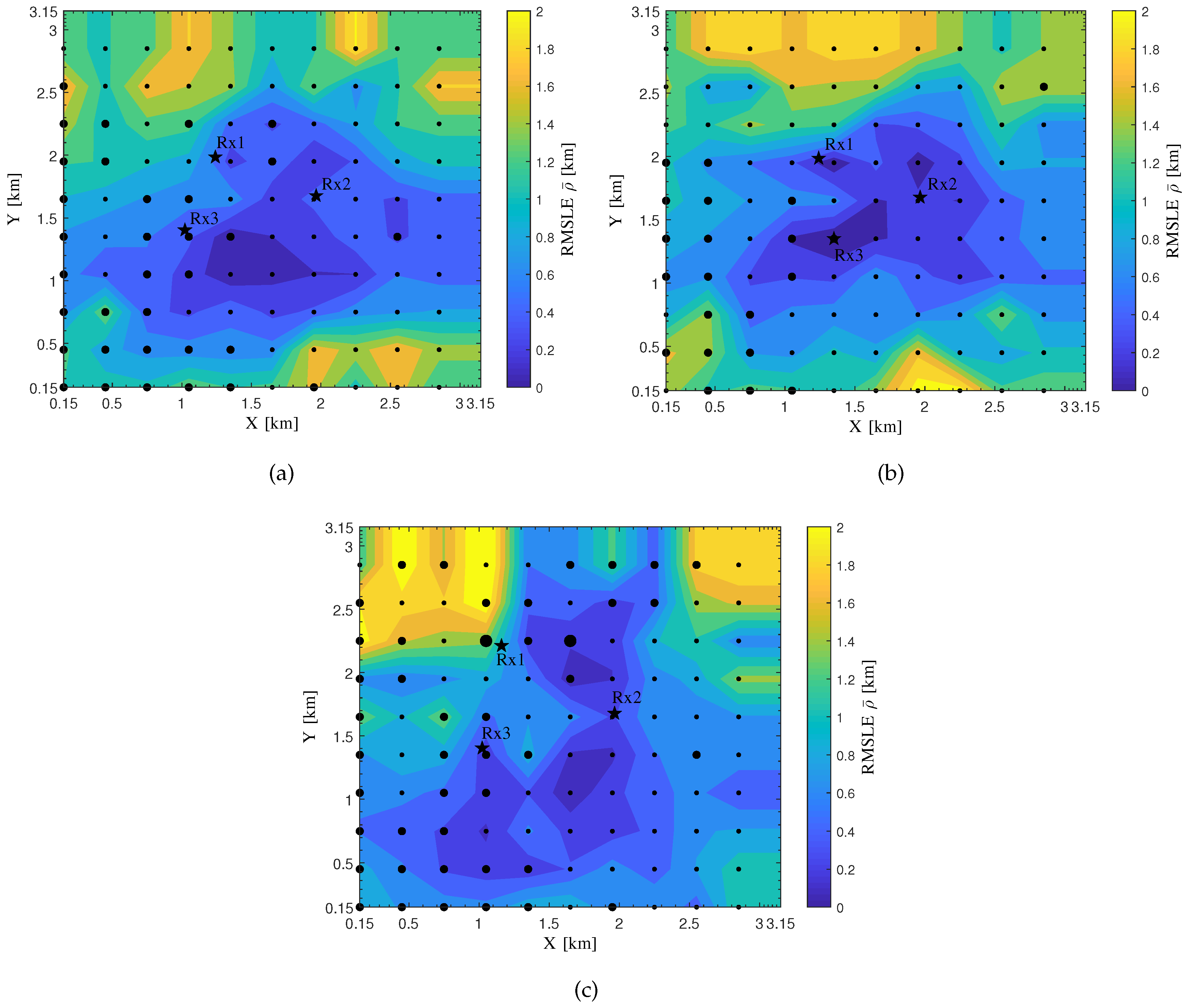
6.2. Sensor Placement for a Realistic Area
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gan, Y.; Cong, X.; Sun, Y. Refinement of TOA localization with sensor position uncertainty in closed-form. Sensors 2020, 20, 390. [Google Scholar] [CrossRef] [Green Version]
- Yildiz, D.; Karagol, S.; Ozgonenel, O. A hyperbolic location algorithm for various distributions of a Wireless Sensor Network. In Proceedings of the 5th International Istanbul Smart Grid and Cities Congress and Fair, Istanbul, Turkey, 19–21 April 2017; pp. 75–79. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Y.I. Multiple sources localization by the WSN using the direction-of-arrivals classified by the genetic algorithm. IEEE Access 2019, 7, 173626–173635. [Google Scholar] [CrossRef]
- Zhong, X.; Tay, W.P.; Leng, M.; Razul, S.G.; See, C.M.S. TDOA-FDOA based multiple target detection and tracking in the presence of measurement errors and biases. In Proceedings of the IEEE 17th International Workshop on Signal Processing Advances in Wireless Communications, Edinburgh, UK, 3–6 July 2016. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Z.; Hao, B.; Si, J.; Wan, P. Bias reduced method for TDOA and AOA localization in the presence of sensor errors. In Proceedings of the IEEE International Conference on Communications, Paris, France, 21–25 May 2017. [Google Scholar] [CrossRef]
- Qi, Y.; Kohno, R. Mitigation of sampling-induced errors in delay estimation. In Proceedings of the IEEE International Conference on Ultra-Wideband, Zurich, Switzerland, 5–8 September 2005. [Google Scholar] [CrossRef]
- Yang, L.; Ho, K.C. An approximately efficient TDOA localization algorithm in closed-form for locating multiple disjoint sources with erroneous sensor positions. IEEE Trans. Signal Process. 2009, 57, 4598–4615. [Google Scholar] [CrossRef]
- Xu, B.; Sun, G.; Yu, R.; Yang, Z. High-accuracy TDOA-based localization without time synchronization. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1567–1576. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wang, R.; Zhao, Y. A bias compensation method for distributed moving source localization using TDOA and FDOA with sensor location errors. Sensors 2018, 18, 3747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, M.; Jackson, D.R.; Chen, J.; Xiong, Z.; Williams, J.T. A TDOA localization method for nonline-of-sight scenarios. IEEE Trans. Antennas Propag. 2019, 67, 2666–2676. [Google Scholar] [CrossRef]
- Shen, G.; Zetik, R.; Thomä, R.S. Performance comparison of TOA and TDOA based location estimation algorithms in LOS environment. In Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008. [Google Scholar] [CrossRef]
- Qu, X.; Xie, L. A comparison study on TDOA based localization algorithms for sensor networks. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, K.C. TDOA source localization in the presence of synchronization clock bias and sensor position errors. IEEE Trans. Signal Process. 2013, 61, 4532–4544. [Google Scholar] [CrossRef]
- Shrestha, J.; Vandendorpe, L. Joint clock parameter and transmitter position estimation using TDOA in one way packet transmission. In Proceedings of the 17th International Workshop on Signal Processing Advances in Wireless Communications, Edinburgh, UK, 3–6 July 2016. [Google Scholar] [CrossRef]
- Amiri, R.; Behnia, F.; Noroozi, A. An efficient estimator for TDOA-based source localization with minimum number of sensors. IEEE Commun. Lett. 2018, 22, 2499–2502. [Google Scholar] [CrossRef]
- Sun, Y.; Ho, K.C.; Wan, Q. Solution and analysis of TDOA localization of a near or distant source in closed form. IEEE Trans. Signal Process. 2019, 67, 320–335. [Google Scholar] [CrossRef]
- Koga, T.; Tajima, H.; Ozeki, S. Results of an evaluation of a multilateration system using ACAS signals. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 3–8 October 2004. [Google Scholar] [CrossRef]
- Galati, G.; Gasbarra, M.; Magaro, P.; Marco, P.D.; Mene, L.; Pici, M. New approaches to multilateration processing: Analysis and field evaluation. In Proceedings of the European Radar Conference, Manchester, UK, 13–15 September 2006. [Google Scholar] [CrossRef]
- Mary, G.I.; Prithiviraj, V. Test measurements of improved UWB localization technique for precision automobile parking. In Proceedings of the International Conference on Recent Advances in Microwave Theory and Applications, Jaipur, India, 21–24 November 2008. [Google Scholar] [CrossRef]
- Wang, T.; Chen, X.; Ge, N.; Pei, Y. Error analysis and experimental study on indoor UWB TDoA localization with reference tag. In Proceedings of the 19th Asia-Pacific Conference on Communications, Denpasar, Indonesia, 29–31 August 2013. [Google Scholar] [CrossRef]
- Keunecke, K.; Scholl, G. IEEE 802.11 n-based TDOA performance evaluation in an indoor multipath environment. In Proceedings of the 8th European Conference on Antennas and Propagation, The Hague, The Netherlands, 18 September 2014. [Google Scholar] [CrossRef]
- Choi, B.; La, K.; Lee, S. UWB TDOA/TOA measurement system with wireless time synchronization and simultaneous tag and anchor positioning. In Proceedings of the IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications, Ottawa, ON, Canada, 28 August 2018. [Google Scholar] [CrossRef]
- Xue, Y.; Su, W.; Wang, H.; Yang, D.; Ma, J. A model on indoor localization system based on the time difference without synchronization. IEEE Access 2018, 6, 34179–34189. [Google Scholar] [CrossRef]
- Urruela, A.; Sala, J.; Riba, J. Average performance analysis of circular and hyperbolic geolocation. IEEE Trans. Veh. Technol. 2006, 55, 52–66. [Google Scholar] [CrossRef]
- Keunecke, K.; Scholl, G. Wi-Fi-based performance analysis of TOA/TDOA estimators by stochastic channel simulations. In Proceedings of the 10th International Symposium on Wireless Communication Systems, Ilmenau, Germany, 27–30 August 2013. [Google Scholar]
- Su, Z.; Shao, G.; Liu, H. Semidefinite programming for NLOS error mitigation in TDOA localization. IEEE Commun. Lett. 2017, 22, 1430–1433. [Google Scholar] [CrossRef]
- Fokin, G.; Kireev, A.; Al-odhari, A.H.A. TDOA positioning accuracy performance evaluation for arc sensor configuration. In Proceedings of the Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 14–15 March 2018. [Google Scholar] [CrossRef]
- Barua, B.; Zaarour, N.; Hakem, N.; Kandil, N. Effect of UWB channel time delay parameters on TDOA localization. In Proceedings of the Sixth International Conference on Digital Information, Networking, and Wireless Communications, Beirut, Lebanon, 25–27 April 2018; pp. 32–36. [Google Scholar] [CrossRef]
- Wang, G.; Ho, K.C. Convex relaxation methods for unified near-field and far-field TDOA-based localization. IEEE Trans. Wirel. Commun. 2019, 18, 2346–2360. [Google Scholar] [CrossRef]
- Pedersen, T.; Fleury, B.H. Radio channel modelling using stochastic propagation graphs. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 13 August 2007. [Google Scholar] [CrossRef] [Green Version]
- Tian, L.; Degli-Esposti, V.; Vitucci, E.M.; Yin, X. Semi-deterministic radio channel modeling based on graph theory and ray-tracing. IEEE Trans. Antennas Propag. 2016, 64, 2475–2486. [Google Scholar] [CrossRef]
- Degli-Esposti, V.; Fuschini, F.; Vitucci, E.M.; Falciasecca, G. Measurement and modelling of scattering from buildings. IEEE Trans. Antennas Propag. 2007, 55, 143–153. [Google Scholar] [CrossRef]
- Goldsmith, A. Digital modulation and detection. In Wireless Communications; Cambridge University Press: Cambridge, UK, 2005; pp. 126–171. [Google Scholar] [CrossRef]
- Roy, T.K.; Pervej, M.F.; Morshed, M. Performance comparison of three optimized alternative pulse shaping filters with the raised cosine filter for wireless applications. In Proceedings of the International Conference on Computer and Information Engineering, Rajshahi, Bangladesh, 26–27 November 2015. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Linear time-invariant systems. In Signals and Systems, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997; Chapter 2. [Google Scholar]
- Fleury, B.H.; Tschudin, M.; Heddergott, R.; Dahlhaus, D.; Pedersen, K.I. Channel parameter estimation in mobile radio environments using the SAGE algorithm. IEEE J. Sel. Areas Commun. 1999, 17, 434–450. [Google Scholar] [CrossRef]
- Ettus Research. Datasheet: USRP N210. 2018. Available online: https://www.ettus.com/product/details/UN210-KIT (accessed on 7 January 2020).
- Cho, S.H.; Yeo, S.R.; Choi, H.H.; Park, C.; Lee, S.J. A design of synchronization method for TDOA-based positioning system. In Proceedings of the 12th International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012. [Google Scholar]
- Ettus Research. Datasheet: OctoClock CDA-2990. 2018. Available online: https://www.ettus.com/product/details/OctoClock (accessed on 7 January 2020).
- Boost C++ Libraries. 2018. Available online: http://www.boost.org (accessed on 7 January 2020).
- Ettus Research. USRP Hardware Driver. 2018. Available online: http://files.ettus.com/manual/page_uhd.html (accessed on 7 January 2020).
- Cho, H.; Jung, Y.; Choi, H.; Jang, H.; Son, S.; Baek, Y. Real time locating system for wireless networks using IEEE 802.15.4 radio. In Proceedings of the 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, 16–20 June 2008. [Google Scholar] [CrossRef]
- Cho, H.; Jang, H.; Baek, Y. Practical localization system for consumer devices using Zigbee networks. IEEE Trans. Consum. Electron. 2010, 56, 1562–1569. [Google Scholar] [CrossRef]
- Schmitz, J.; Hernandez, M.; Mathar, R. Demonstration abstract: Real-time indoor localization with TDOA and distributed software defined radio. In Proceedings of the 15th ACM/IEEE International Conference on Information Processing in Sensor Networks, Vienna, Austria, 11–14 April 2016. [Google Scholar] [CrossRef]
- Li, J.; Wagen, J.F.; Lachat, E. ITU model for multi-knife-edge diffraction. IEE Proc. Microw. Antennas Propag. 1996, 143, 539–541. [Google Scholar] [CrossRef]
- Schau, H.; Robinson, A. Passive source localization employing intersecting spherical surfaces from time-of-arrival differences. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1223–1225. [Google Scholar] [CrossRef]
- Mensing, C.; Plass, S. Positioning algorithms for cellular networks using TDoA. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Toulouse, France, 14–19 May 2006. [Google Scholar] [CrossRef]
- Meng, W.; Xie, L.; Xiao, W. Optimal TDOA sensor-pair placement with uncertainty in source location. IEEE Trans. Veh. Technol. 2016, 65, 9260–9271. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Carrier frequency | 3600 | MHz |
| Signal bandwidth | 10 | MHz |
| Number of frequency points | 2001 | - |
| for smooth surfaces | m | |
| for rough surfaces | m | |
| S for smooth surfaces | - | |
| S for rough surfaces | - | |
| Signal-to-noise ratio | 20 | dB |
| Number of noise realizations | 120 | - |
| Type 1 | Type 2 | Type 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Rx1 | Rx2 | Rx3 | Rx1 | Rx2 | Rx3 | Rx1 | Rx2 | Rx3 | |
| 1241 | 1966 | 1022 | 1241 | 1966 | 1350 | 1160 | 1966 | 1022 | |
| 1985 | 1677 | 1403 | 1985 | 1677 | 1350 | 2212 | 1677 | 1403 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, X.; Rodríguez-Piñeiro, J.; Liu, Y.; Yin, X.; Pérez Yuste, A. A Novel Experiment-Free Site-Specific TDoA Localization Performance-Evaluation Approach. Sensors 2020, 20, 1035. https://doi.org/10.3390/s20041035
Ye X, Rodríguez-Piñeiro J, Liu Y, Yin X, Pérez Yuste A. A Novel Experiment-Free Site-Specific TDoA Localization Performance-Evaluation Approach. Sensors. 2020; 20(4):1035. https://doi.org/10.3390/s20041035
Chicago/Turabian StyleYe, Xiaokang, José Rodríguez-Piñeiro, Yuan Liu, Xuefeng Yin, and Antonio Pérez Yuste. 2020. "A Novel Experiment-Free Site-Specific TDoA Localization Performance-Evaluation Approach" Sensors 20, no. 4: 1035. https://doi.org/10.3390/s20041035