Research on Rotational Angle Measurement for the Smart Wheel Force Sensor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
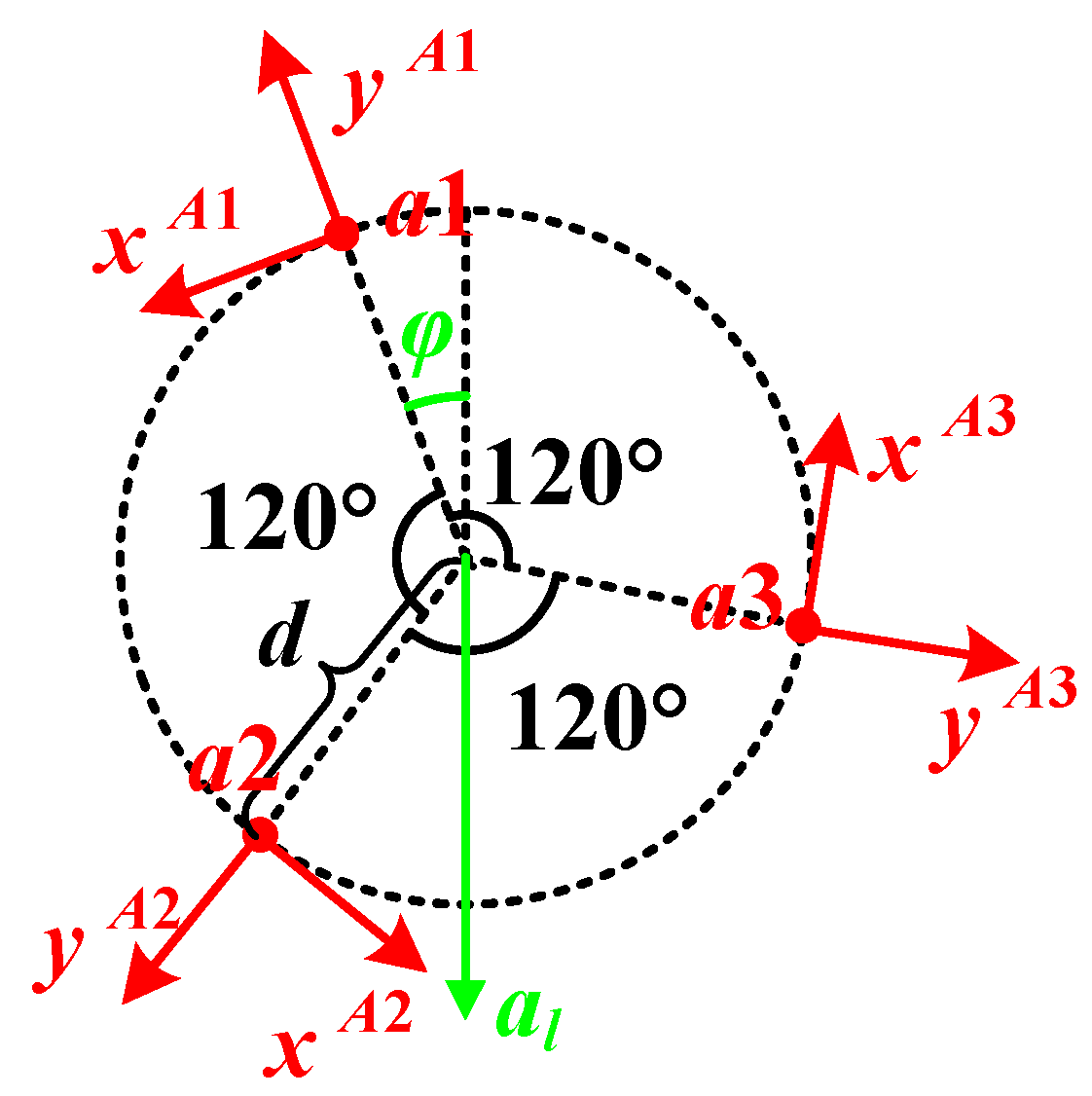
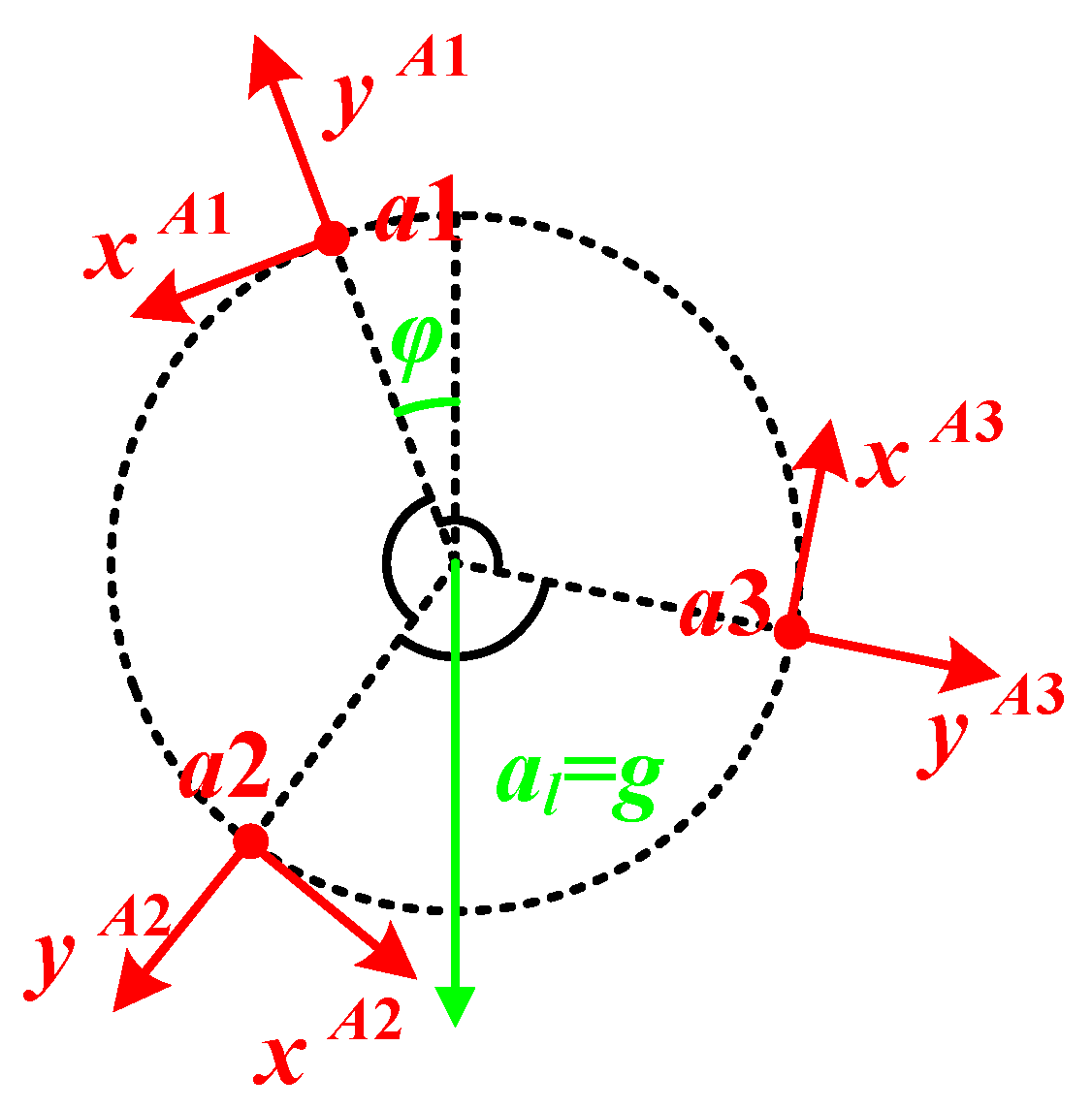
2. Coordinates Relationship in the SWFS
3. Rotational Angle Evaluation
3.1. Rotational Speed Evaluation
3.2. Evaluation Error Analysis
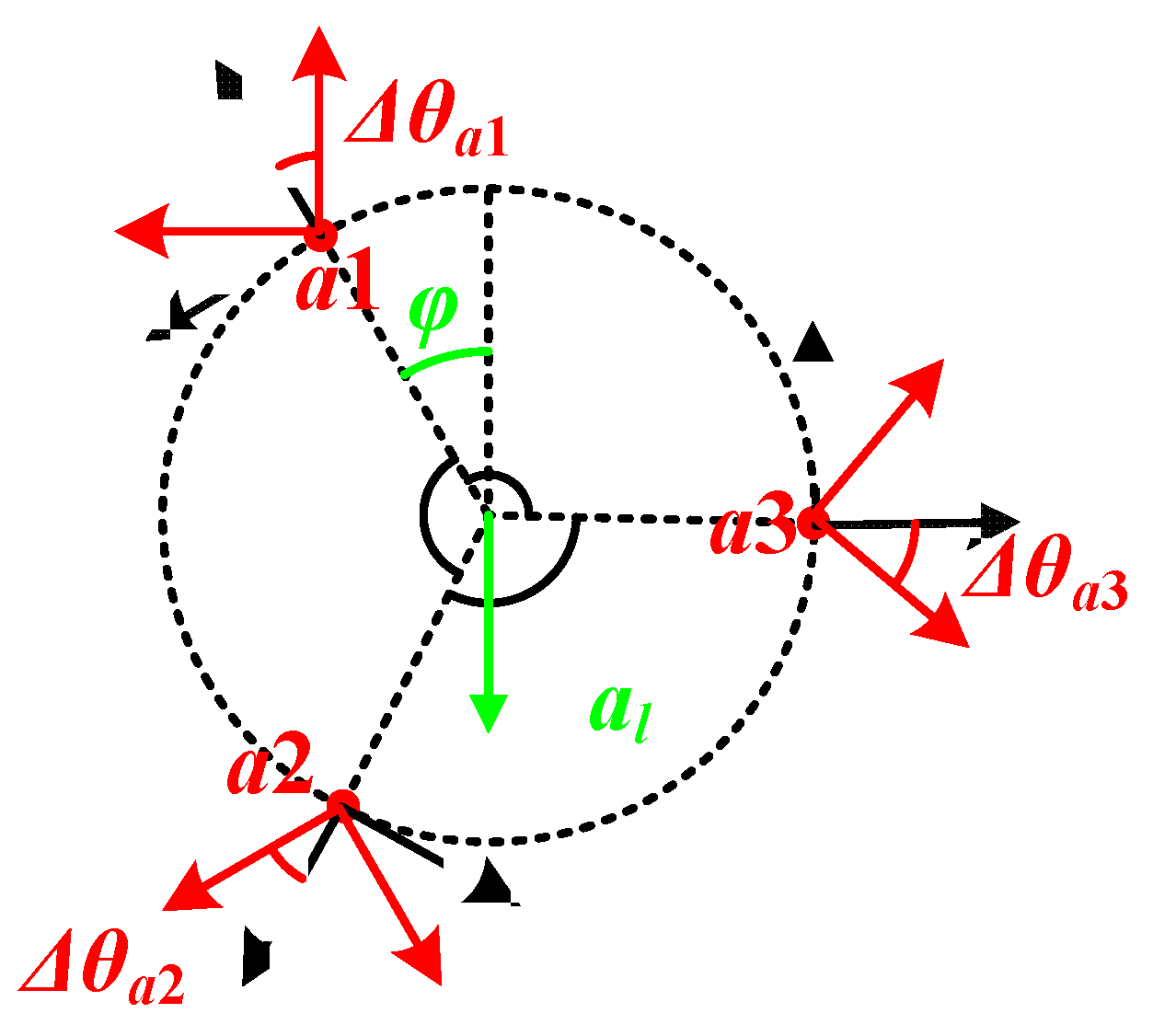
3.2.1. Attitude Error
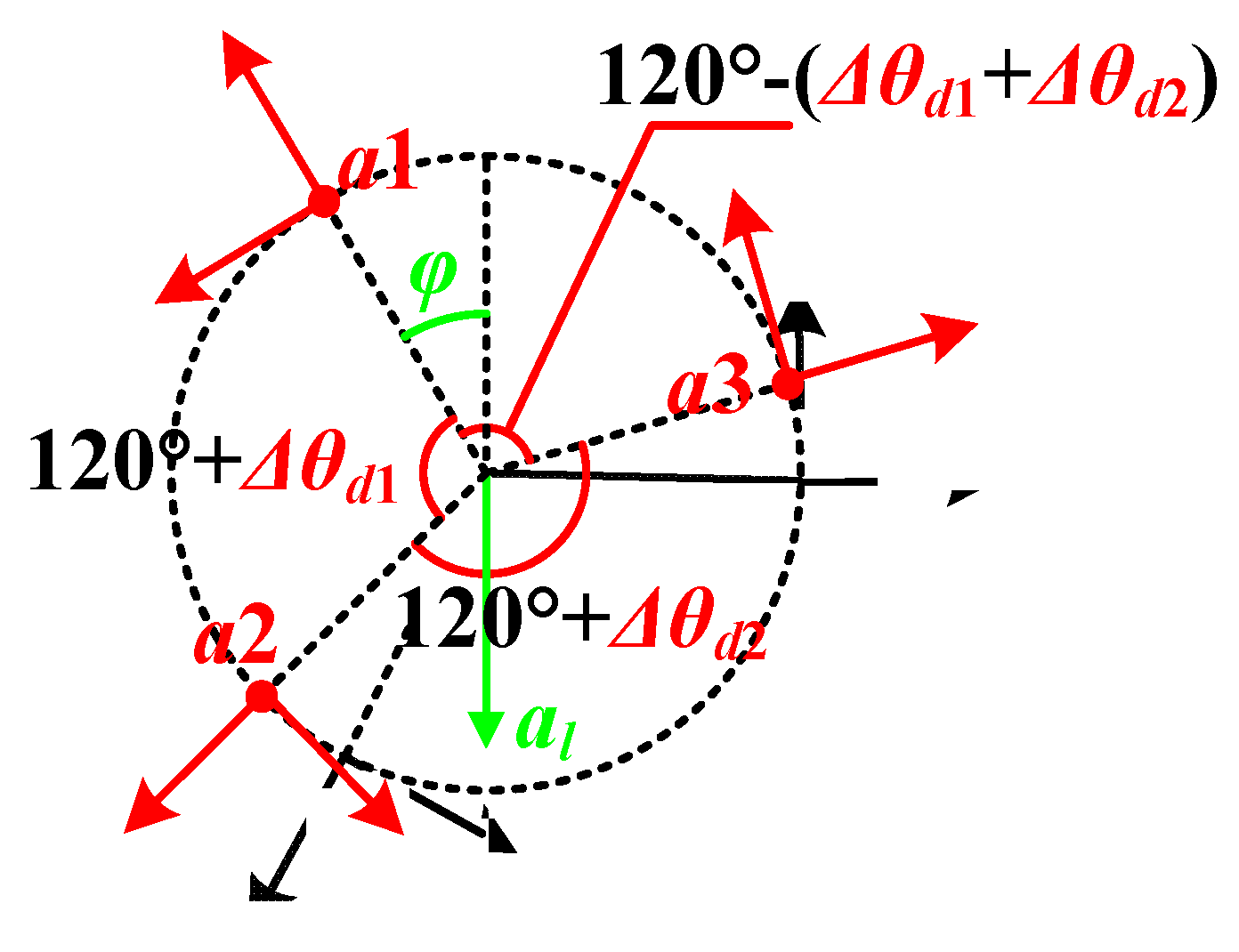
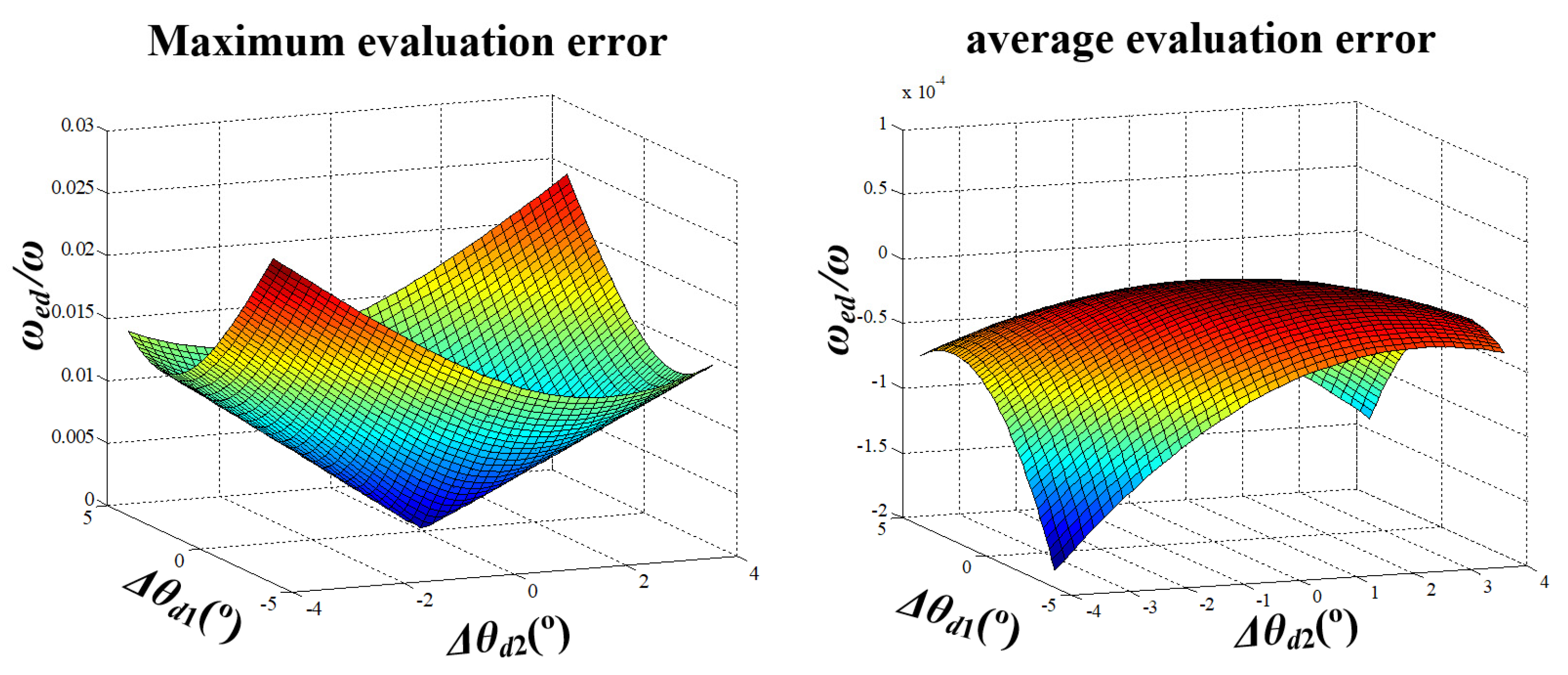
3.2.2. Angular Distribution Error
3.2.3. Rotational Radius Error
3.2.4. Eccentric Error
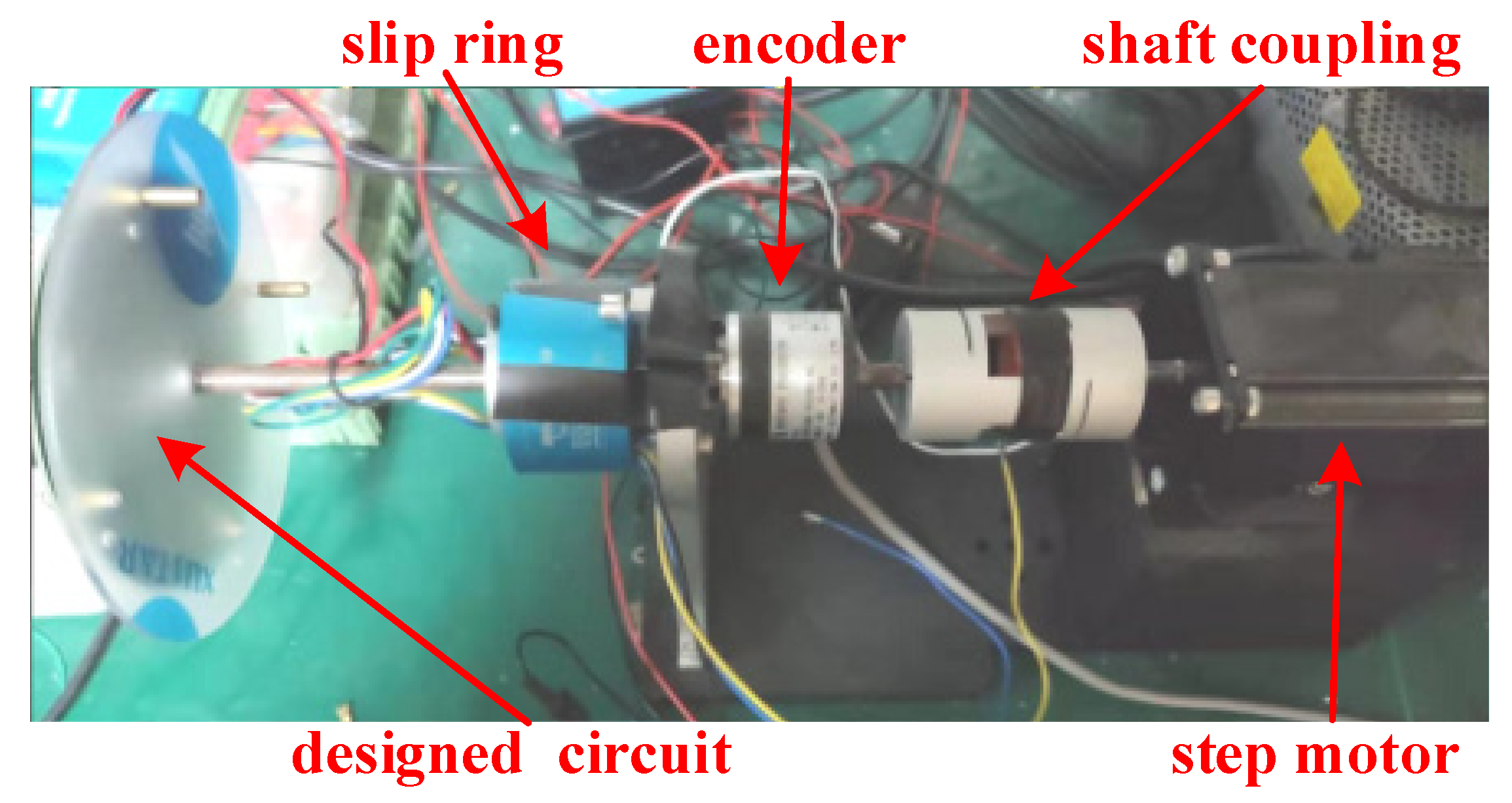
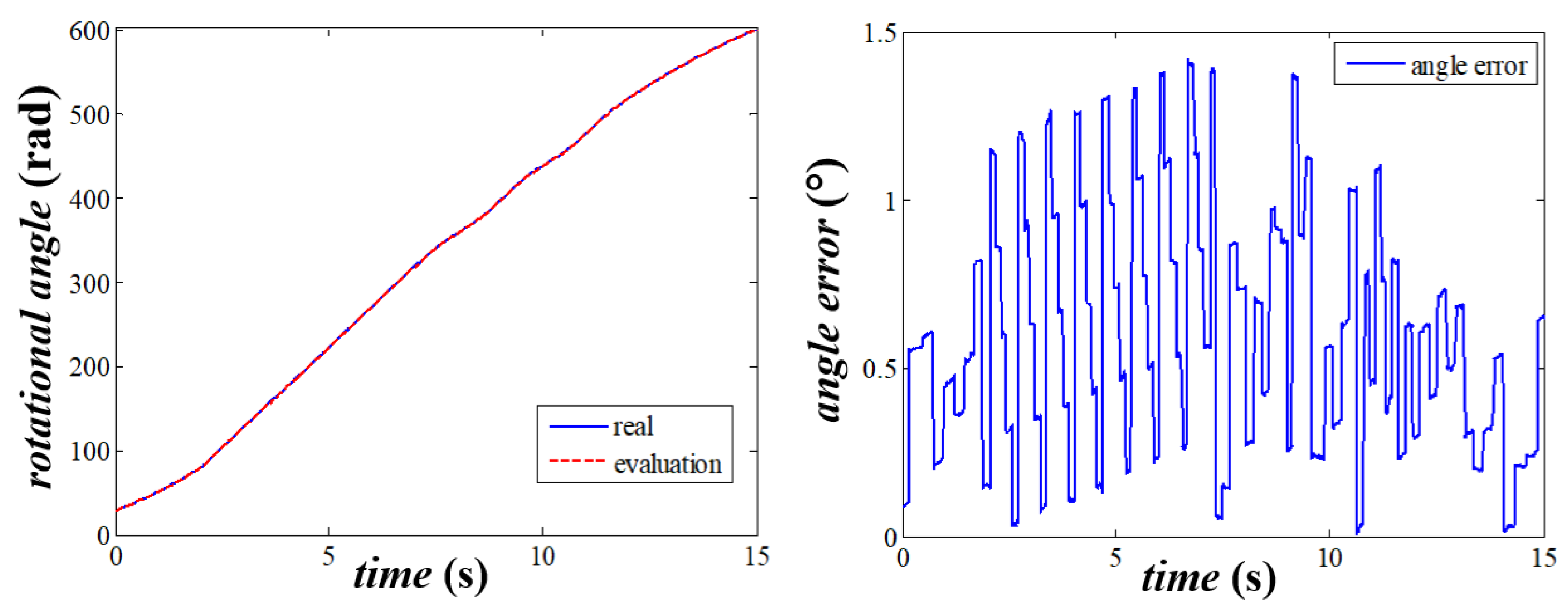
4. Simulations and Tests
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Acosta, M.; Kanarachos, S. Tire force estimation and road grip recognition using extended kalman filter, neural networks and recursive least squares. Neural Comput. Appl. 2017, 2017, 1–21. [Google Scholar]
- Acosta, M.; Kanarachos, S.; Blundell, M. Virtual tyre force sensors: An overview of tyre model-based and tyre model-less state estimation techniques. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 1883–1930. [Google Scholar] [CrossRef]
- De Falco, D.; Di Massa, G.; Pagano, S.; Strano, S. Wheel Force Transducer for Shimmy Investigation. In Proceedings of the World Congress on Engineering, London, UK, 1–3 July 2015. [Google Scholar]
- Herrmann, M.; Barz, D.; Evers, W.; Barber, J. An Evaluation of the Mechanical Properties of Wheel Force Sensors and Their Impact on to the Data Collected during Different Driving Manoeuvres. In Proceedings of the SAE 2005 World Congress & Exhibition, Detroit, MI, USA, 11–14 April 2005. [Google Scholar]
- Zhang, X.L.; Wu, T.; Shao, Y.; Song, J. Structure optimization of wheel force transducer based on natural frequency and comprehensive sensitivity. Chin. J. Mech. Eng. 2017, 30, 973–981. [Google Scholar] [CrossRef]
- Acosta, M.; Kanarachos, S.; Fitzpatrick, M.E. A Virtual Sensor for Integral Tire Force Estimation using Tire Model-less Approaches and Adaptive Unscented Kalman Filter. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017), Madrid, Spain, 26–28 July 2017. [Google Scholar]
- Acosta, M.; Gladstone, M.; Prins, J.; Rayo, C.; Furlan, M.; Gutiérrez, J.; O’Neill, A. On tyre force virtual sensing for future Automated Vehicle-Based Objective Tyre Testing (AVBOTT). Veh. Syst. Dyn. 2018, 57, 1795–1821. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Estimation of longitudinal force and sideslip angle for intelligent four-wheel independent drive electric vehicles by observer iteration and information fusion. Sensors 2018, 18, 1268. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shinde, V.V.; Pawar, P.R.; Shaikh, A.; Saraf, M.R. Generation of India Specific Vehicle Wheel Load Spectrum and Its Applications for Vehicle Development. In Proceedings of the Symposium on International Automotive Technology, SIAT, Pune, India, 16–19 January 2013. [Google Scholar]
- Zhu, B.; Han, J.Y.; Zhao, J. Tire-Pressure Identification Using Intelligent Tire with Three-Axis Accelerometer. Sensors 2019, 19, 2560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, S.L.; Koh, C.G.; Kuang, K.S.C. Proposed rail pad sensor for wheel-rail contact force monitoring. Smart Mater. Struct. 2018, 27, 115041. [Google Scholar] [CrossRef]
- Regolin, E.; Alatorre, A.; Zambelli, M.; Victorino, A.; Charara, A.; Ferrara, A. A Sliding-Mode Virtual Sensor for Wheel Forces Estimation with Accuracy Enhancement via EKF. IEEE Trans. Veh. Technol. 2019, 68, 3457–3471. [Google Scholar] [CrossRef] [Green Version]
- Ferrara, A.; Incremona, G.P. Robust motion control of a robot manipulator via integral suboptimal second order sliding modes. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013. [Google Scholar]
- Wang, D.; Lin, G.; Zhang, W.G.; Zhao, N.; Pang, H. The new method of initial calibration with the wheel force transducer. Sens. Rev. 2014, 34, 98–109. [Google Scholar] [CrossRef]
- Bueno-López, J.L.; Cardenal, J.; Deibe, Á.; García de Jalón, J. Potential and Limitations of an Improved Method to Produce Dynamometric Wheels. Sensors 2018, 18, 541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, K.J.; Cheng, L. Dynamic decoupling and compensating methods of multi-axis force sensors. IEEE Trans. Instrum. Meas. 2000, 49, 935–941. [Google Scholar]
- Baffet, G.; Charara, A.; Lechner, D. Estimation of vehicle sideslip, tire force and wheel cornering stiffness. Control. Eng. Pract. 2009, 17, 1255–1264. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.W.; Zhang, W.G.; Wang, D. Wheel force sensor-based techniques for wear detection and analysis of a special road. Sensors 2018, 18, 2493. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D.; Lin, G.Y.; Zhang, W.G.; Jiang, T. Angle error compensation in wheel force transducer. Measurement 2016, 77, 203–212. [Google Scholar] [CrossRef]
- Wang, D.; Li, X.; Fen, L.; Xu, Y. Design of adaptive filter for the wheel force transducer. Measurement 2018, 125, 526–534. [Google Scholar] [CrossRef]
- Yang, Y.; Chow, D.L.; Yu, X. A Gyroscope Free Inertial Measurement Unit for Human Gesture Recognition and Applications: A Preliminary Study. Struct. Health Monit. 2015. [Google Scholar] [CrossRef]
- Minnaar, N.; Smit, W.J. Removing accelerometer redundancy in non-gyro inertial measurement unit. In Proceedings of the 2017 IEEE AFRICON, Cape Town, South Africa, 18–20 September 2017. [Google Scholar]
- Dehghani, M.; Kharrati, H.; Seyedarabi, H.; Baradarannia, M. The Correcting approach of Gyroscope-free inertial navigation based on the applicable topological map. J. Comput. Inf. Sci. Eng. 2019, 19, 021001. [Google Scholar] [CrossRef]
- Feng, L.H.; Chen, W.; Cheng, M.; Zhang, W.G. The gravity-based approach for online re-calibration of wheel force sensors. IEEE ASME Trans. Mech. 2019, 24, 1686–1697. [Google Scholar] [CrossRef]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Chen, S.; Li, X.; Zhang, W.; Jin, H. Research on Rotational Angle Measurement for the Smart Wheel Force Sensor. Sensors 2020, 20, 1037. https://doi.org/10.3390/s20041037
Wang D, Chen S, Li X, Zhang W, Jin H. Research on Rotational Angle Measurement for the Smart Wheel Force Sensor. Sensors. 2020; 20(4):1037. https://doi.org/10.3390/s20041037
Chicago/Turabian StyleWang, Dong, Siwei Chen, Xuanpeng Li, Weigong Zhang, and Haolong Jin. 2020. "Research on Rotational Angle Measurement for the Smart Wheel Force Sensor" Sensors 20, no. 4: 1037. https://doi.org/10.3390/s20041037
APA StyleWang, D., Chen, S., Li, X., Zhang, W., & Jin, H. (2020). Research on Rotational Angle Measurement for the Smart Wheel Force Sensor. Sensors, 20(4), 1037. https://doi.org/10.3390/s20041037