1. Introduction
Automatic speech recognition (ASR) is the recognition and translation of spoken language into text. An ASR system is used to estimate the most likely sequence of words for a given speech input. Over the past few decades, automatic speech recognition has been an active area of research as the technology is considered as an efficient means of human-to-human and human-to-machine communication.
Over time, the technology is getting more mature and more natural to integrate into smart devices; therefore, the use of ASR is increasing in different applications. Mobile applications like Google Assistant, Amazon’s Alexa, and Apple’s Siri [
1,
2] are redefining the way we interact with our smart devices. There are various reasons for this trend. First is the availability of better computational resources. Secondly, with the advancements in big data technologies, we now have access to large databases that we can use to train the generic models more efficiently. Thirdly, the number of users is growing day-by-day for smart devices such as mobile phones, smart wearables, smart homes, and infotainment systems in vehicles. To provide the best experience to the users while interacting with more advanced smart devices, it is necessary to have more robust and efficient interfaces for human-machine interaction. This will only be possible when we have standardized models for speech recognition, and such systems will ultimately facilitate all kinds of users regardless of their background, education, and lifestyle to have a natural interaction with devices.
Various applications based on speech recognition are already facilitating humankind in different tasks. Using voice search in different applications [
3,
4], users can search for anything using voice commands instead of using a keyboard for search. There are many examples of such applications like query search engines, driving directions, search for hotels and restaurants, and search for products on e-commerce websites.
Speech-to-Speech (S2S) translation is helpful when two people from different linguistic backgrounds need to interact with each other. They need a human interpreter who understands both languages to translate. Speech-to-speech [
5,
6] translation helps in automatic conversion of one language into another without the help of an interpreter, thus making communication more comfortable and natural.
Another important application of speech recognition is home automation systems. Automation is becoming an important part of our daily life, from smart homes to autonomous cars. Home automation systems [
7,
8] help residents remotely control various home appliances. Most of these systems have an integrated voice recognition system to operate the home appliances. Currently, voice recognition is also used in gaming applications. Instead of using a menu for the selection of items in a game, modern games use voice commands, which make such applications easier to operate.
Acoustic feature extraction and acoustic models are two crucial parts of a speech recognition system. The acoustic features help to extract concise information from the input acoustic waveform, which is useful for recognizing the word and phonetic content of speech. Similarly, an exemplary acoustic model architecture and training method ensure that the feature vectors are robustly matched with the phoneme classes to ensure proper feature classification. The generic model of an ASR system is shown in
Figure 1. The acoustic features are extracted from the raw speech signal, and the output of the acoustic model is a likely phone sequence, which corresponded to the particular speech utterance. Since the 1980s, the HMM has been a paradigm that is used to learn this mapping of phones into HMM sequences. A probabilistic model, i.e., Gaussian mixture model (GMM), maps sequences of feature vectors to a sequence of phonemes. Therefore, HMM was the state-of-the-art for a long time; however, now the deep neural networks (DNNs) have almost replaced the existing machine learning based approaches. These DDNs either learn the representations of the words after integrating in-depth features with the output of HMM-GMM based architectures or solely learn the deep features from a word-audio file or spectrogram.
Although the use of ASR in numerous applications is increasing exponentially with time, however, developing a highly efficient ASR with the least error rate is highly desired for real-time applications. Despite all the advanced algorithms that have been designed for ASR, there is still the need to improve them for real-time applications. The existing models stating state-of-the-art accuracies do not work well in a real-time environment due to the versatility of the real-time environment. The noise is one of the most significant factors that affects the accuracy of such models. To the best of our knowledge, a real-time noise factor has not been considered in the past by most of the literature, and it revolves around the learning of phones on clean data. However, a single work that embeds the noise to design its model could attain quite a bit of efficiency.
This research carries out a comprehensive study, experimentation, and comparative analysis of different machine learning and deep learning algorithms to propose the most accurate and efficient architecture for robust speech recognition in a noisy environment. In this study, various models are developed using conventional techniques such as Gaussian mixture models and hidden Markov models (GMM-HMM), deep neural networks (DNNs), conventional neural networks (CNN), and long short-term memory (LSTM). The effect of noise is highlighted by testing the proposed models on noisy data, and the impact of training on noisy data is also observed. Moreover, accent, dialect, mixed language, and non-native speech are massive problems in speech recognition; therefore, a customized dataset is collected locally in this study to test the accuracy of models in real-time applications. We also manipulate different parameters of the proposed CNN to achieve better accuracy. We evaluate the results on both versions of the speech command dataset [
9,
10]. We compare our results with other state-of-the-art techniques, which proves that the proposed models show significant improvement in terms of accuracy.
The rest of the paper is organized as follows.
Section 2 is the literature review of various ASR systems that have already been developed. In
Section 3, the design and methodology of the developed systems are discussed. It also explains all the methods used, from preprocessing to the validation of the results. In
Section 4, the outcomes of different ASR systems developed during this study and various tests performed on these systems are discussed. Our research work is concluded in
Section 5.
2. Literature Review
In order to solve the problem of ASR, various variants of DNN, CNN, and RNN have been proposed [
11,
12,
13,
14,
15] for different datasets, i.e., TIMIT, Switchboard [
16,
17,
18,
19], and Aurora-4 [
20,
21], with the word error rate (WER) ranging from 28.9 to 4.83, in the last few years. Pete Warden contributed Speech Command Dataset Version 1 (V1) [
9], an enhanced version (V2) [
10] of the same dataset that was released later with additional commands.
Words for the Speech Command Dataset were chosen wisely, and most commands targeted Internet of Things (IoT) and robotics applications. Other words in the dataset were selected to cover most of the phonemes so that the models could be used as a generalized model. Pete Warden used a CNN based model for small-footprint keyword spotting [
22] for evaluation of the speech command dataset and reported baseline results for both versions of the datasets. The accuracy achieved for V1 was 85.4, and for V2, it was 88.2. In the past two years, different neural network architectures trained on the same dataset were proposed; those architectures are described below.
McMahan et al. [
23] used the transfer learning approach in CNN (SB-CNN [
24]), ResNet [
25], and DenseNet [
26] for speech commands recognition. They used UrbanSound8k and a speech command dataset for their experimentation. They added multiscale input representation with dilated convolution. Moreover, they exploited different transfer learning approaches and found that pre-training on a different dataset, i.e., UrbanSound8k, produced better results than directly training on the speech command dataset. They also concluded that if transfer learning were used along with multiscale input, then only 40% of the training data were required to achieve the same results as training on 100% of the data.
Jansson [
27] used CNN with one-dimensional (1D) convolutions for the recognition of speech commands by using raw waveform as the input. To increase the training data, three data augmentation techniques were used: (i) time scale shifting, (ii) amplitude scaling, and (iii) noise addition. Pseudo-labelling was also used so that the trained model could also be used to classify unlabelled data and achieve better results.
Andrade et al. [
28] further improved the classification accuracy by proposing an attention based convolutional recurrent model. They used raw wav files as the input and computed spectrograms to feed the network to extract short-term and long-term dependencies. These features were then fed to the attention layer, which spotted the region of valuable information, and this information was then used as the input to the dense layer for classification.
Zhang et al. [
29] explored different neural network architectures, DNN [
30], CNN, CRNN [
31], and LSTM [
32], for the keyword spotting task for resource-constrained devices, and they also explored DS-CNN [
33] for the same task and concluded that DS-CNN worked best among all in terms of accuracy within the same constraints of memory and computational power. Segal et al. [
34] used a speech command dataset for pre-training of their convolutional neural network and used the YOLO (you look only once) [
35] architecture by considering audio as objects. Their goal was boundary localization of utterances and then their classification.
Tang et al. [
36] used ResNet for keyword spotting after successful implementation of the same on other speech domain tasks, i.e., speaker identification [
37] and automatic speech recognition [
38]. They took res15 as a base model to train on the speech command dataset (12 commands) along with their variants of ResNet. They magnified the residual block, explored the effect of deeper models on the word error rate (WER), and established new state-of-the-art reference models for the speech command dataset.
To the best of our knowledge, none of the above-proposed models considered training with noise-augmented audio data, for increasing noise robustness. Jansson et al. [
27] used noise addition, but they did not give the result comparison with and without noise addition in the training data. Moreover, the speech commands dataset contained some noise; it was of sufficiently high SNR, and the noise level was low. This was evident from the low WER achieved on this dataset when trained on clean data using both GMM or DNN acoustic models. The following two papers explored the effect of noise by training and testing their model on noisy data. Bae et al. [
39] used the capsule network, which was initially proposed for image recognition by Hinton et al. [
40]. The aim of using a capsule network for speech recognition was to capture spatial relationships and pose information of features in both the time and frequency axes, which are overlooked by CNNs. By using this approach, they achieved a 11.6% and a 10.4% lesser word error rate on the clean and noisy test set, respectively, as compared to the CNN model. However, they only trained their model on the clean dataset and did not consider the noisy dataset for training.
Soni et al. [
41] proposed the CNN-LSTM based neural network architecture, which consisted of two blocks. One was the convolutional enhancement block used for time-frequency masking. The other one was the LSTM based sequence block for robust speech command recognition. They trained their proposed model on the noisy dataset by adding noises provided with the speech command dataset, thus providing robustness in the model.
All of the above-described systems used CNN and its variants for their modelling of speech command recognition, whereas we used DNN and LSTM along with CNN in our proposed work.
3. Methodology
In this section, the details of the tools, language models, feature extraction, and acoustic models to implement different architectures are discussed.
3.1. Tools
Kaldi is an open-source speech recognition toolkit released under the Apache license [
42]. The development of Kaldi started in 2009, and it is now one of the most famous speech recognition toolkits. The basic idea behind Kaldi was the development of an ASR toolkit that should be flexible and extensible. The main reason behind the success of Kaldi is the availability of various DNN recipes that other toolkits lack. We used the “Kaldi toolkit” for the implementation of all models except CNN. The implementation of CNN was done in MATLAB by using the “Audio Processing Toolbox.” This toolbox provides essential functions for processing audio data in bulk. The CNN models were performed on a GPU-NVIDIA TITAN Xp 12 GB, due to the training time constraint on a CPU.
3.2. Language Model
To define the language of the specific audio data, we needed to prepare the dictionary. The dictionary included phonemes, non-silence phonemes, and a lexicon. CMUdict initially created by the speech group at Carnegie Mellon University is typically used in Kaldi for English pronunciation, so we extracted words present in the speech command dataset from CMUdict and created a customized dictionary for our data.
Table 1 defines the four files for language data.
All the unique words pronounced by the speaker were presented in the lexicon text file. Each word was associated with phonemes. There could be two or more phonemes for each word. The British and American accents have their own sets of slightly different phonemes and word pronunciations. Phonemes are the way the word is pronounced. The nonsilence_phones text file represented the unique phonemes in the lexicon text file. This was how we prepared the language data, and then by using these data, we generated a language model that was further utilized for training purposes.
3.3. Feature Extraction
Feature extraction is also known as speech parameterization, and it was used to characterize spectral features of an input audio signal in order to facilitate speech decoding. The Mel frequency cepstral coefficient (MFCC) introduced by Davis et al. [
43] is one of the most popular techniques for feature extraction in speech recognition systems. The reason behind the popularity of MFCC is its ability to mimic the behaviour of the human ear.
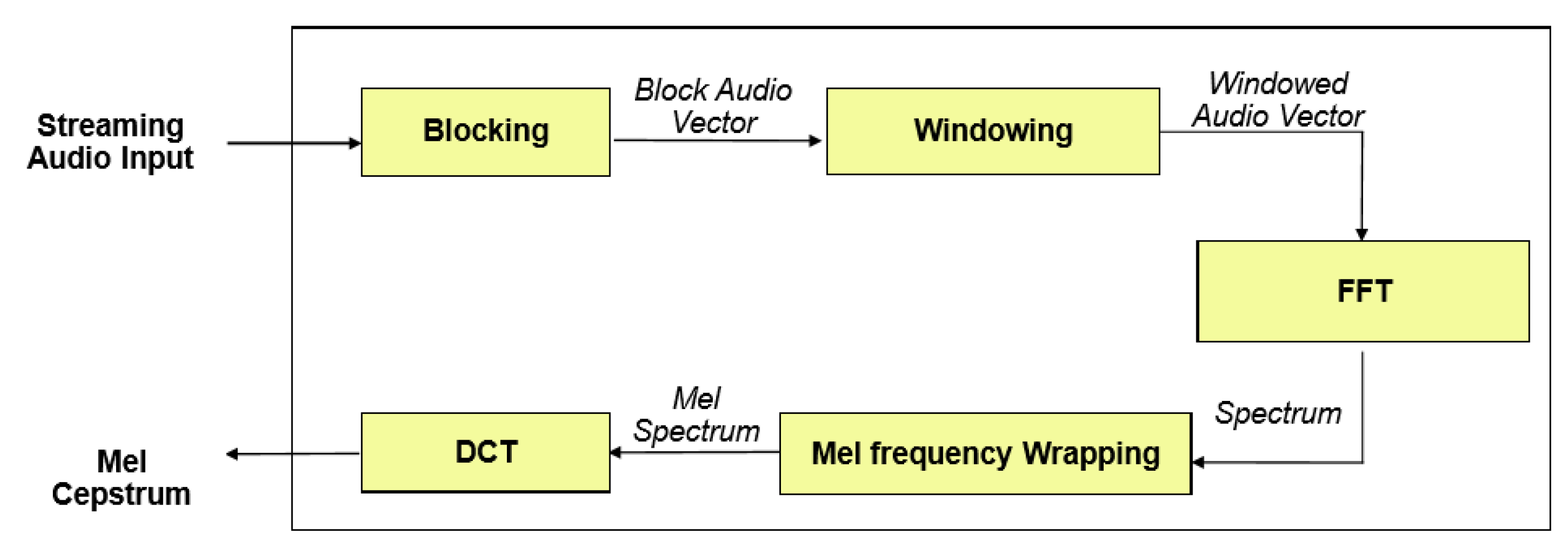
Figure 2 shows the key steps involved in the calculation of MFCC features.
3.3.1. Frame Blocking
The first step involved in the process is frame blocking, in which a streaming audio signal is blocked into frames of 25 ms shifted by 10 ms.
3.3.2. Windowing
After blocking, each frame is multiplied by a window using a windowing function. There are many windowing functions available in Kaldi, but usually, the Hamming window is used, as shown in Equation (
1):
where Nis the number of samples in a frame, and multiplying every frame by the Hamming window reduces discontinuities at the beginning and end of each frame. This step was also required to do the frequency analysis of each frame.
3.3.3. Fast Fourier Transform
Spectral analysis of speech signals showed that different timbres in a signal have different energy distributions over frequency. FFT was applied to each frame of N samples to obtain its magnitude frequency response. This process converted signals from the time to the frequency domain. FFT is a fast implementation of the discrete Fourier transform (DFT).
3.3.4. Mel Frequency Warping
In this step, the magnitude frequency response resulting from FFT was multiplied by triangular bypass filters on the Mel scale to get the log energy of each bypass filter. The Mel frequency that is more discriminative at lower frequencies and less discriminative at higher frequencies mimics the non-linear perception of sound by the human ear. The human ear behaves logarithmically towards speech both on the amplitude and frequency scales, i.e., the frequency resolution is better (high) at lower frequencies and low, particularly at high frequencies. Furthermore, in the human inner ear cochlea, sound waves are transduced into electrical impulses that can be interpreted by the brain as individual frequencies of sound [
44]. This is similar to how cepstral coefficients are calculated in MFCC. We could convert between Mel frequency (
m) and frequency (
f) in hertz by using Equations (2) and (3).
Each filter in the triangular filter bank had a response of one at the centre frequency and decreased linearly towards zero until it reached the centre of the adjacent frequency. In Kaldi, the default number of filters is 23 because it usually gives the best results on 16 kHz speech signals.
3.3.5. Discrete Cosine Transform
After log energy computations, the Mel frequency cepstrum was obtained by applying DCT on filtered results. The coefficients of the Mel frequency cepstrum are called Mel frequency cepstral coefficients (MFCC). Using DCT after FFT transforms the frequency domain into the time-like domain called the quefrency domain. In Kaldi, by default, the first 13 cepstral coefficients are kept as features.
MFCC can be directly used as features for speech recognition. However, to get better performance, various transforms are applied to the results of MFCC. One of these transformations is cepstral mean and variance normalization (CMVN) [
45]. CMVN is a computationally efficient normalization technique that reduces the effects of noise. Similarly, to add dynamic information to MFCC features, first and second order deltas can be calculated. Given a feature vector
X, first-order deltas can be calculated by using Equation (
4).
where
w is the regression coefficients and
n is the window width. Second-order deltas can be derived from first-order deltas by using Equation (
5).
After the first- and second-order delta calculation, the combined feature vector becomes:
Other feature transformation techniques used in Kaldi are linear discriminant analysis (LDA) [
46], heteroscedastic linear discriminant analysis (HLDA) [
47], and maximum likelihood linear transform (MLLT) [
48]. These transforms can be applied individually, as well as in multiple combinations to enhance the performance of a speech recognition system. It was observed that by applying diagonalizing MLLT after LDA improved the effect of LDA (LDA + MLLT).
3.4. Acoustic Model
Acoustic modelling analyses the training data in terms of relevant features such as by taking different possibilities, expressing them as probabilities, and then, combining these probabilities into an HMM.
Before the training of the acoustic model, the dataset was divided into training and test sets. In this paper, four types of acoustic models, GMM-HMM, DNN-HMM, LSTM-HMM, and CNN, were trained for both versions of the dataset and their noisy versions. Moreover, the local dataset, along with standard datasets were used for the evaluation of our trained models.
3.4.1. Gaussian Mixture Model Based Approaches
All the models used cepstral mean and variance normalization (CMVN) transformed MFCC features as basic features. CMVN is a well-known, computationally efficient normalization technique for robust speech recognition [
49]. Distortion caused by noise contamination is minimized by CMVN, which is very helpful for robust feature extraction by linearly transforming the cepstral coefficients to have the same segmental statistics [
45].
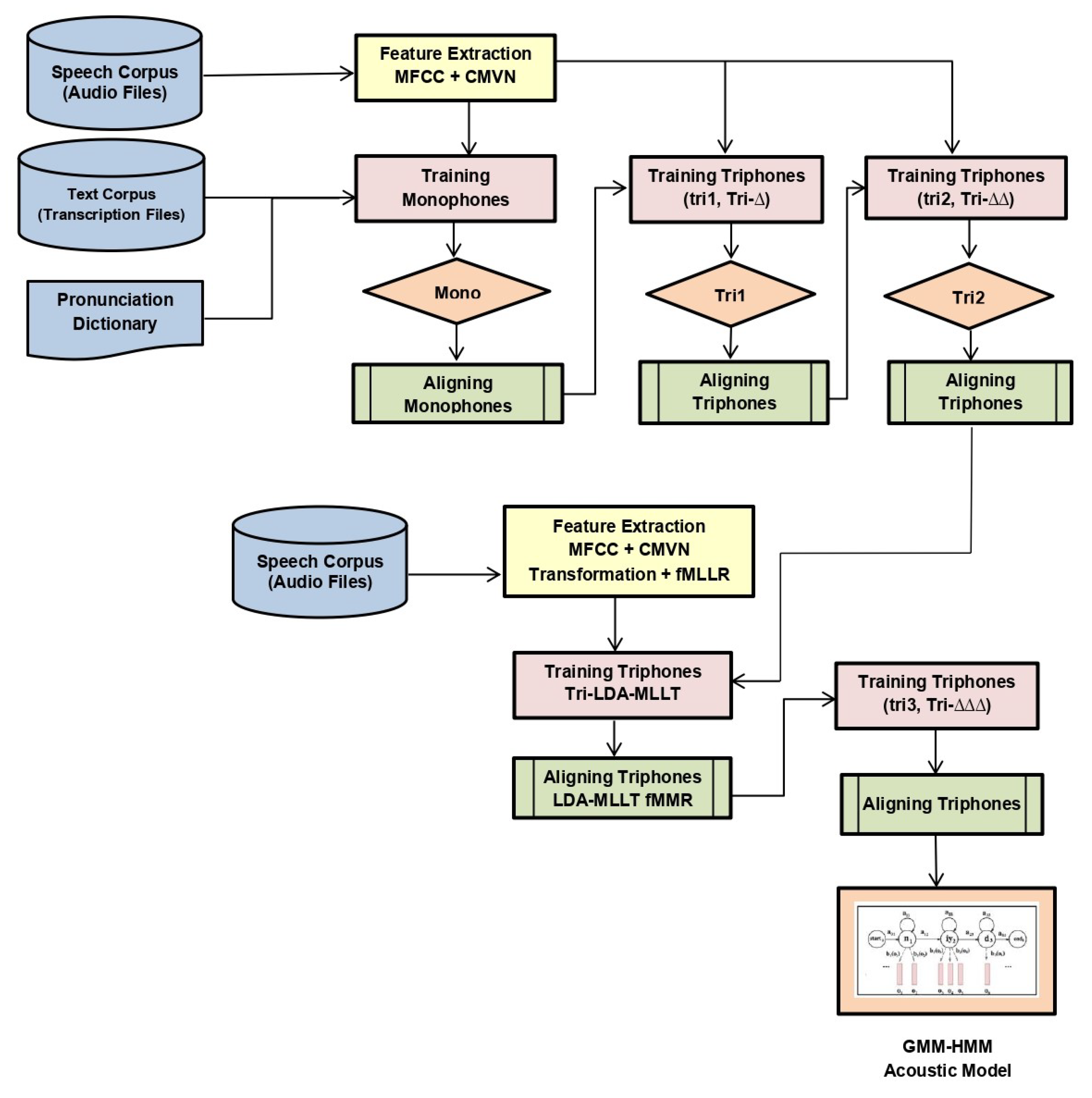
Moreover, a detailed description of the training process along with additional transformations and specifications of all variants of machine learning based models are provided below:
In the first step, acoustic features from training and testing data were extracted. For this study, MFCC features were used as acoustic features. The detailed process for the extraction of these features was described earlier in the feature extraction details.
After feature extraction, CMVN was applied to the resulting features.
After feature extraction and normalization, a basic monophone acoustic model called mono was trained.
In the next step, a basic triphone model tri1 was trained by using the same features as monophone models. The number of leaves and Gaussians used to train the network was set to 2000 and 11,000, respectively.
The next model (tri2a) was trained by using delta transformed features. First- and second-order were used as features for this model. The number of leaves and Gaussians used in training was set to 2000 and 11,000, respectively.
Then, the triphone model (tri2b) was trained by applying the LDA + MLLT on the acoustic features. We used the same number of leaves (2000) and Gaussians (11,000) to train the model.
Then, the tri2b_MMI model was trained by applying maximum mutual information (MMI) on top of LDA + MLLT with the same number of leaves and Gaussians.
To check the effect of boosting, boosting of 0.05 was applied on the tri2b_MMI model.
Then, tri2b_MPE was trained by applying maximum phone error (MPE) on top of LDA + MLLT, where the number of triphone CART leaves and Gaussians used in training was set to 2000 and 11,000, respectively.
The last triphone model tri3b was trained by applying LDA + MLLT + speaker adaptive training (SAT) feature transforms. Total leaves were set to 2000, and total Gaussians were set to 11,000 while training the model.
Similarly, MMI was applied on top of tri2b in model tri2b_MMI, and it was also applied on tri3b. tri3b_MMI used MFCC along with the LDA + MLLT + SAT + MMI feature transform.
Additionally, MMI including the feature space (fMMI) was applied to the tri3b_MMI model with 2000 leaves and 11,000 Gaussians while training the model.
All the above-stated models that were trained using machine learning approaches are shown in
Figure 3. We can see that it was a sequential process where alignments of each model were fed to the next model, i.e., the alignment of mono was fed in tri1, alignment of tri1 in tri2, and so on. Models were trained on features extracted from the speech corpus provided transcriptions files along with the phonetic dictionary.
3.4.2. Deep Learning Based Approaches
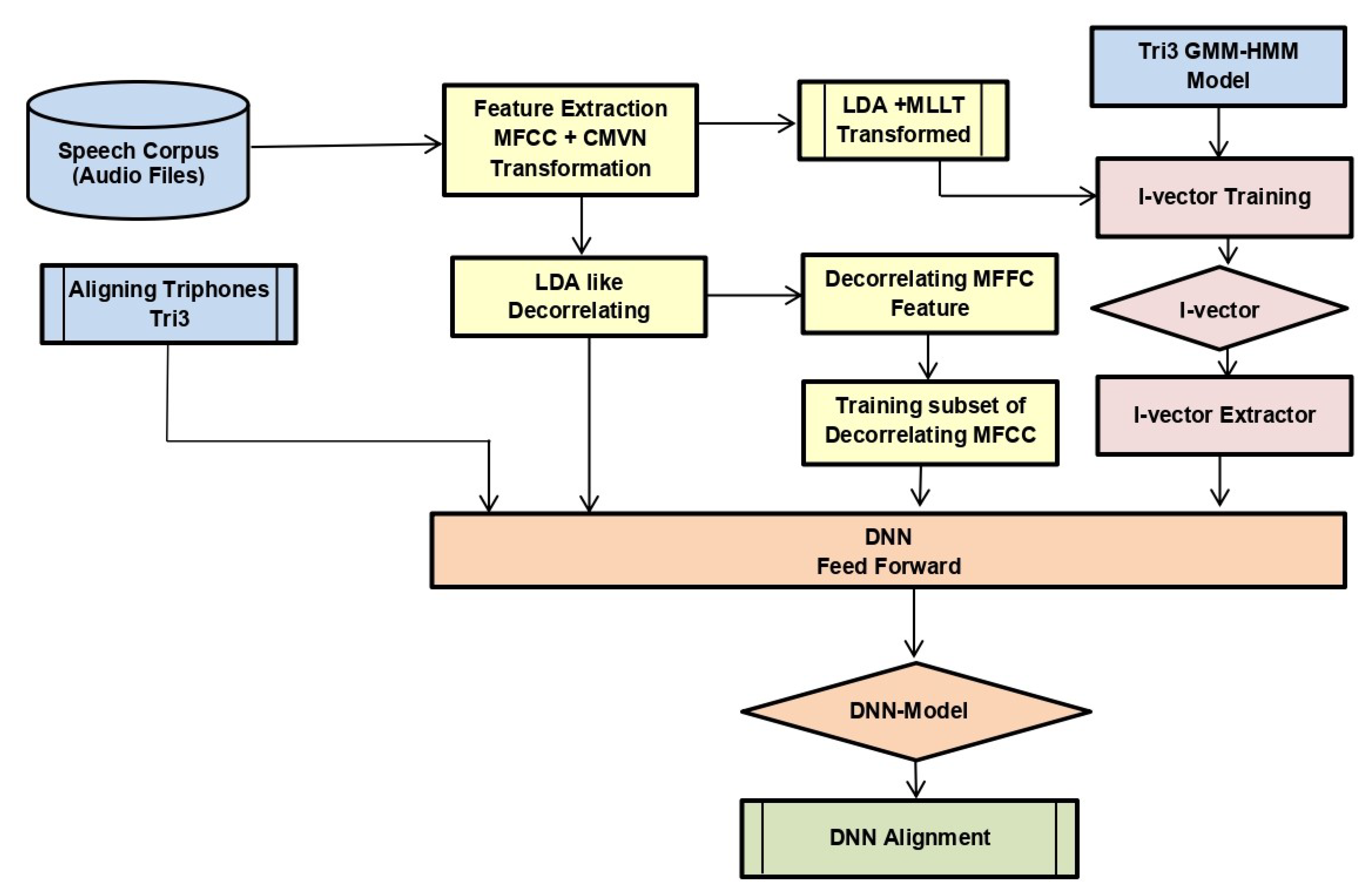
For deep learning based approaches, we used DNN, LSTM, CNN, and their variants.
We used the alignments of tri3b, 40 dimension MFCC (spliced) + LDA + MLLT + fMLLR transformed features. Low-dimensional representation of the tri3 GMM-HMM model, i.e., i-vector, was also fed to DNN. The neural network saw only a window of transformed features having four frames on either side of the central frame at a time. We trained DNN with one and two layers with initial learning rate 0.01, final learning rate 0.001, input dim2000, output dim 400, number of epochs 20 with mini-batch size 128, and optimization function stochastic gradient descent. The model is shown in
Figure 4.
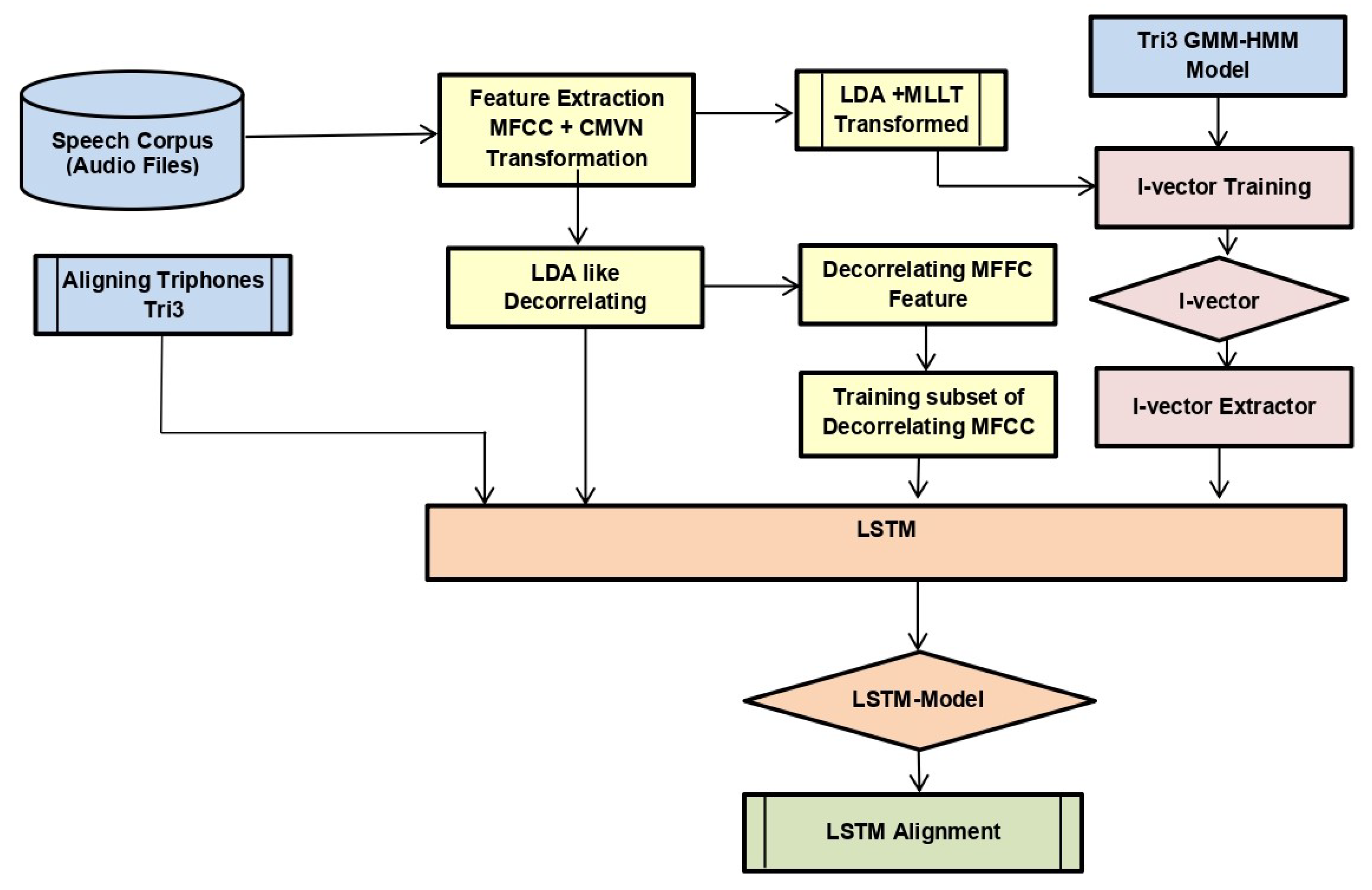
We used the alignments of tri3b, 40-dimensional MFCC (spliced) + LDA + MLLT + fMLLR transformed features. Low-dimensional representation of the tri3 GMM-HMM model, i.e., i-vector, was also fed to LSTM. We trained LSTM with a three layer network with initial learning rate 0.0006, final learning rate 0.00006, input dim 1024, hidden dim 1024, RNN projection dim 256, number of epochs 10 with mini-batch size 100, and optimization function stochastic gradient descent. The model is shown in
Figure 5.
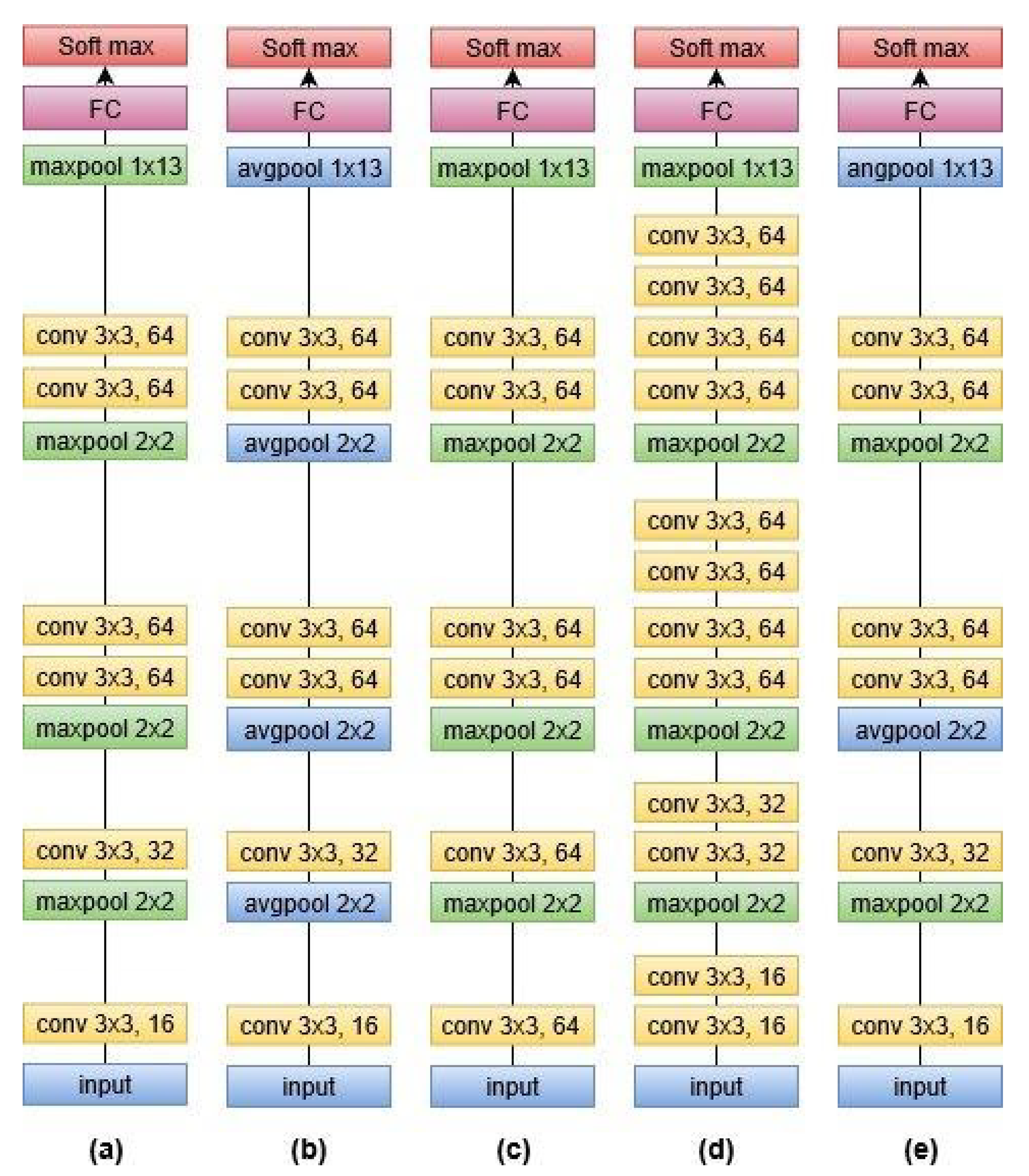
We trained five different CNN architectures.
Figure 6 shows a graphical view of these models, which are discussed below. The output was classified by using the soft-max function. Since this was a multi-class problem, soft-max helped the training to converge more quickly. The activation function at each node was the rectified linear unit (ReLU) with an initial learning rate of 0.0005. The model was trained for 25 epochs to achieve better accuracy by keeping in view the time constraint.
- (a)
CNN-max
It is a convolutional neural network with 6 convolutional layers, 4 max-pooling layers and 1 fully connected layer. All other models are the variant of this architecture.
- (b)
CNN-avg
This model was similar to (a) except max-pooling was replaced by average pooling. The purpose of this model was to report the consequence of replacing max-pooling with average pooling.
- (c)
CNN-max-sameconv
This was the same as (a), but the size of the filter was kept the same for all convolutional layers, i.e., 64. This model was used to find the outcome of varying the filter size.
- (d)
CNN-max-addconv
This was a convolutional neural network with 12 convolutional layers, 4 max-pooling layers, and 1 fully connected layer. This model would help to analyse the effect of extra convolutional layers.
- (e)
CNN-max-avg
This model was also similar to (a), and the only difference was the replacement of a few max-pooling layers with average pooling. Training such a model would depict the influence on the accuracy of the speech recognition system when both types of poolings are employed.
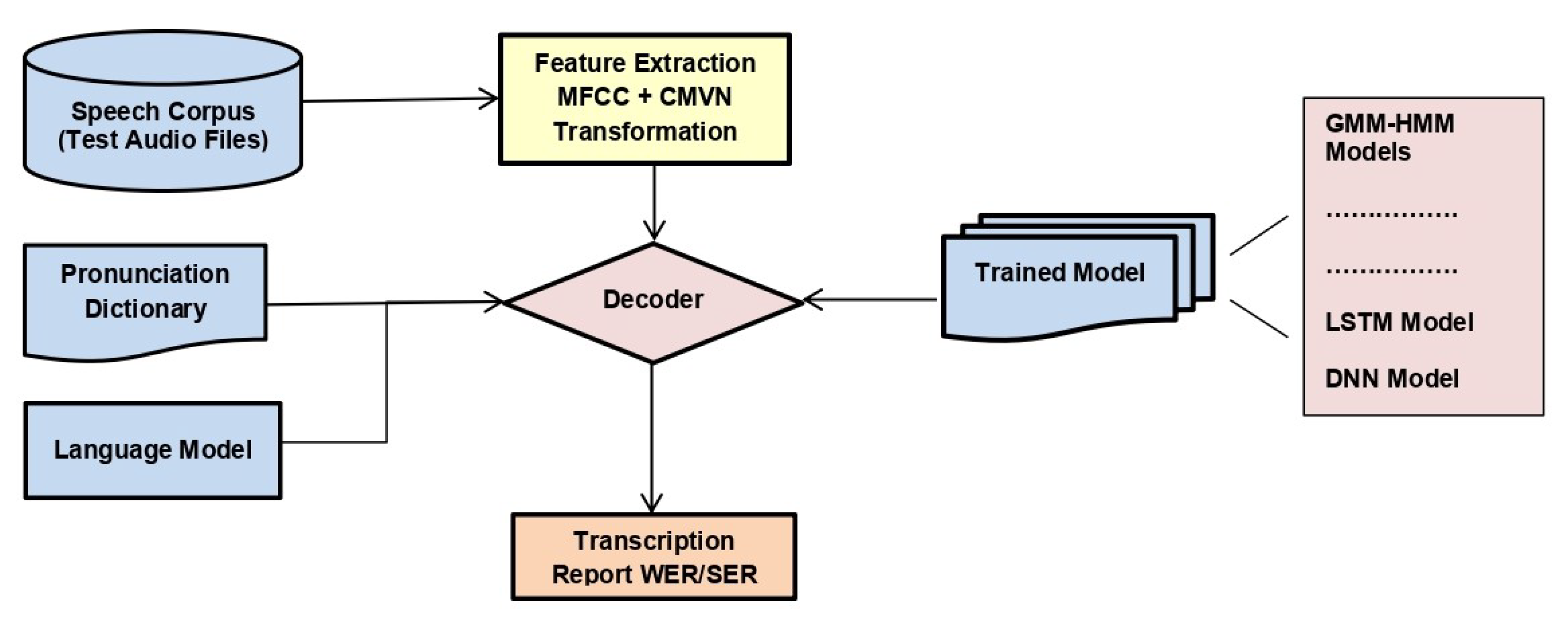
3.5. Decoding
After training all the models, the decoder was provided with the trained model, language model, pronunciation dictionary, and features extracted from test speech corpora. The decoder matched the test sample with already learned data and produced a transcription of the audio. It also reported WER.
Figure 7 illustrates the model for decoding.
5. Conclusions and Future Work
In this research, detailed experimentation and an extensive comparison of speech recognition using machine learning techniques and deep learning techniques were carried out. We trained our proposed models on both clean and noisy data and evaluated the performance of our models. Moreover, for testing the performance of our proposed models in real-time, we customized a dataset having an Asian accent with embedded noise. Our experimental evaluation on the dataset showed much better results than existing state-of-the-art techniques. After the evaluation of different models, we concluded that feed-forward DNN trained iteratively outperformed all other techniques with the minimum word error rate (WER). The performance of the DNN trained on noise augmented data, where noise was merged with the clean utterance, was found better than training the DNN on separate sets of noise and utterance files. As previously discussed, data augmentation is a well-established method for increasing the robustness of deep neural network based classifiers, especially for computer vision. Due to this, DNN learned the utterance, as well as the noise “together”, thus making it the right choice for applications in environments with background noise. Hence, this was a data augmentation technique. We concluded that it could also be effectively used for audio data applications such as speech recognition. As future work, we would like to investigate the performance of our proposed models on larger datasets with a large vocabulary. Moreover, we would like to investigate the sentence error rate (SER) of all models that are trained on isolated words, as well as phrases. For now, we augmented non-human noises in our data, but in the future, we would like to experiment with the effect of human noises in the background of real utterance.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}