4.1. vis-NIR and XRF Individual Performance
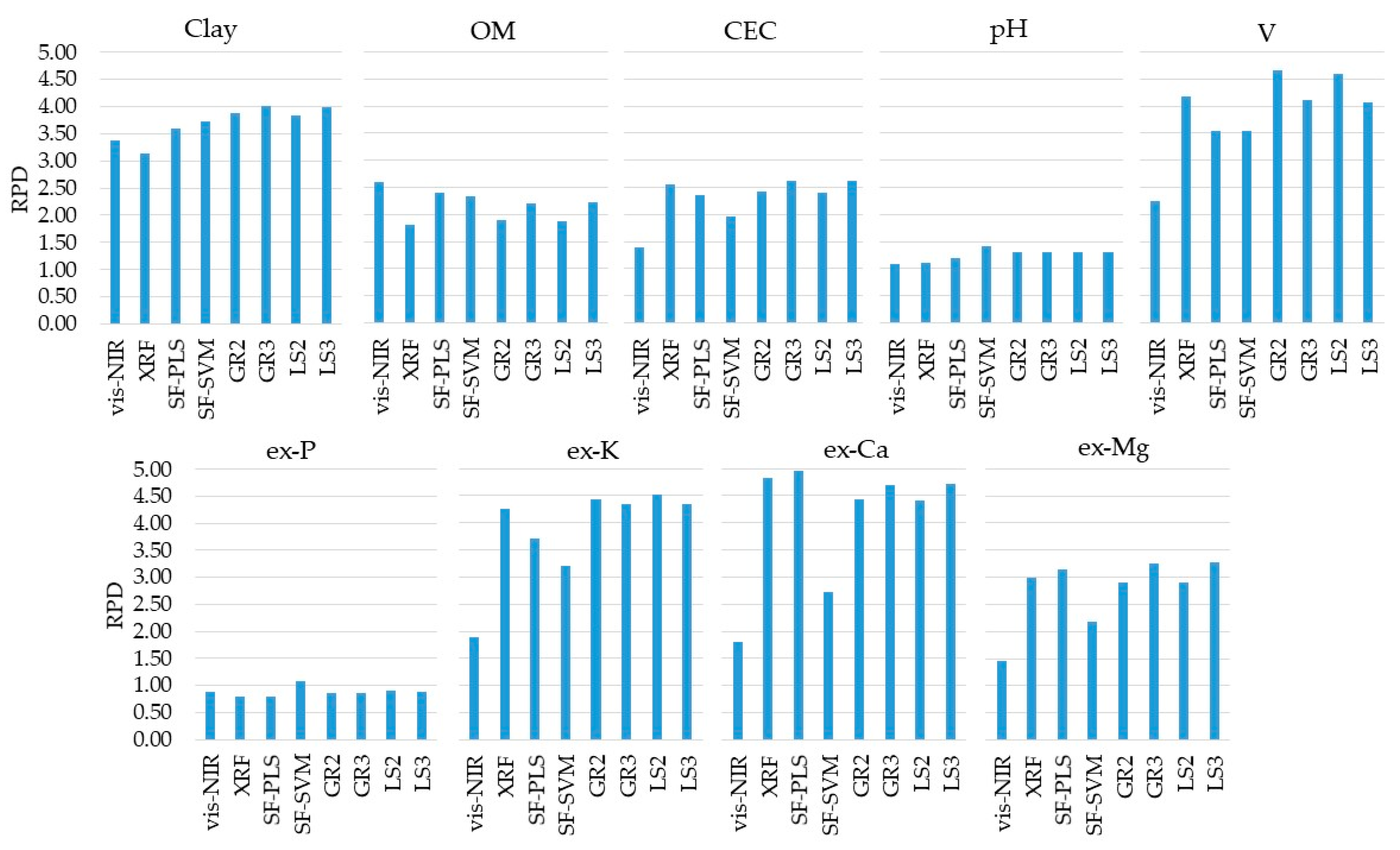
The XRF sensor showed a greater number of attributes predicted with good and excellent performances (i.e., with RPD ≥ 2.00). However, both vis-NIR and XRF sensors achieved satisfactory prediction performance (i.e., with RPD ≥ 1.40) for the same attributes (clay, OM, CEC, V, ex-K, ex-Ca, and ex-Mg). Using the vis-NIR sensor individually, predictions with good and excellent performances were obtained for three attributes (clay, OM, and V), while the XRF sensor alone was successful in prediction of six attributes (clay, CEC, V, ex-K, ex-Ca, and ex-Mg) with the same quality of prediction performance. Thus, by using both sensors concomitantly, through individual modeling (without using data fusion approaches), a higher number of attributes (seven attributes: clay, OM, CEC, V, ex-K, ex-Ca, and ex-Mg) was predicted with good and excellent performances compared to the individual use of each sensor alone.
The best predictive performances for OM and clay were obtained with the vis-NIR sensor, compared to those obtained with the XRF sensor. Both clay and OM are attributes with active spectral responses in the NIR region, which explains the excellent predictions obtained with the vis-NIR sensor. Clay minerals had multiple absorption features in the vis-NIR spectra (e.g., gibbsite at 2265 nm, kaolinite at 2200 and 2180 nm, and hematite and goethite at 480, 513, 650, 840, 903, and 940 nm) [
71]. On the other hand, the organic compounds surface consisted mainly of carboxyl (–COOH), –OH phenolic, and alcoholic groups that are functional groups with known spectral signatures in NIR region (e.g., OH group’s features at 1414 and 1917 nm) [
72]. The predictions obtained for clay and OM using the vis-NIR sensor corroborated with different studies conducted on tropical soils, which reported R
2 values ranging from 0.75 to 0.93 for clay [
17,
21,
73,
74], and between 0.30 and 0.83 for OM [
17,
21,
74,
75]. Clay prediction in tropical soils via XRF spectroscopy is justified by the relationships that exist between the total contents of Al, Si, and Fe with kaolinite, gibbsite, and hematite clay minerals, which are minerals commonly found in Brazilian tropical soils [
28]. In turn, OM predictions via XRF can be explained by its relationship with X-ray scattering peaks [
33], as well as by its potential relationship with clay content [
76]. Predictions with R
2 ranging from 0.71 to 0.85 for clay [
28,
77], and from 0.48 to 0.98 for OM [
24,
28,
33,
34] were reported by works conducted on tropical soils using XRF sensors.
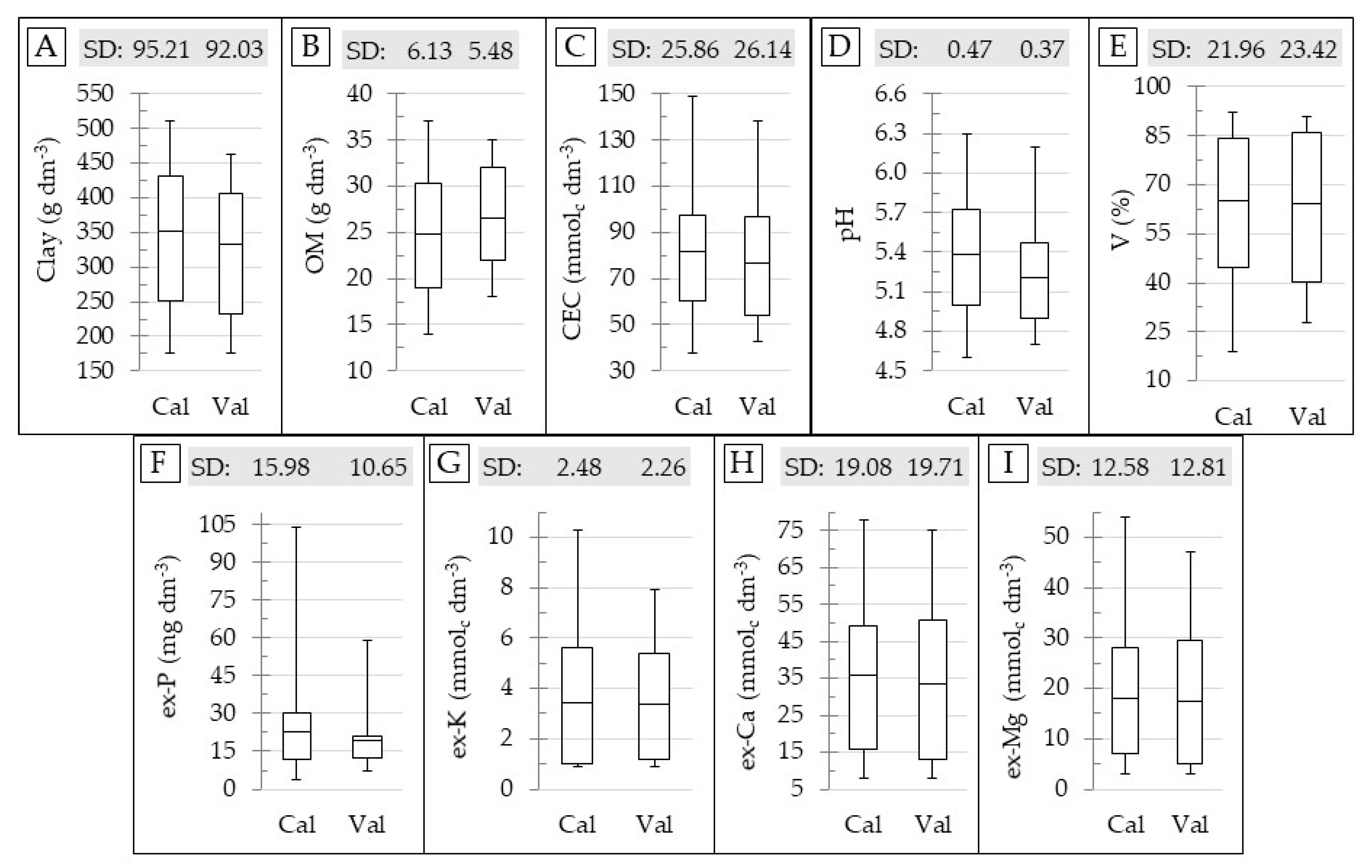
Results showed that the XRF sensor clearly outperformed the vis-NIR sensor for CEC, V, ex-K, ex-Ca, and ex-Mg prediction, although the latter also achieved satisfactory prediction performance for these attributes (
Figure 5). CEC, V, ex-K, ex-Ca, and ex-Mg are considered as secondary soil attributes that have no direct spectral responses in the NIR spectroscopy range [
15]. Nevertheless, vis-NIR prediction models can be successfully established for such secondary attributes, especially when they are correlated with one or more spectrally active attributes such as OM and clay [
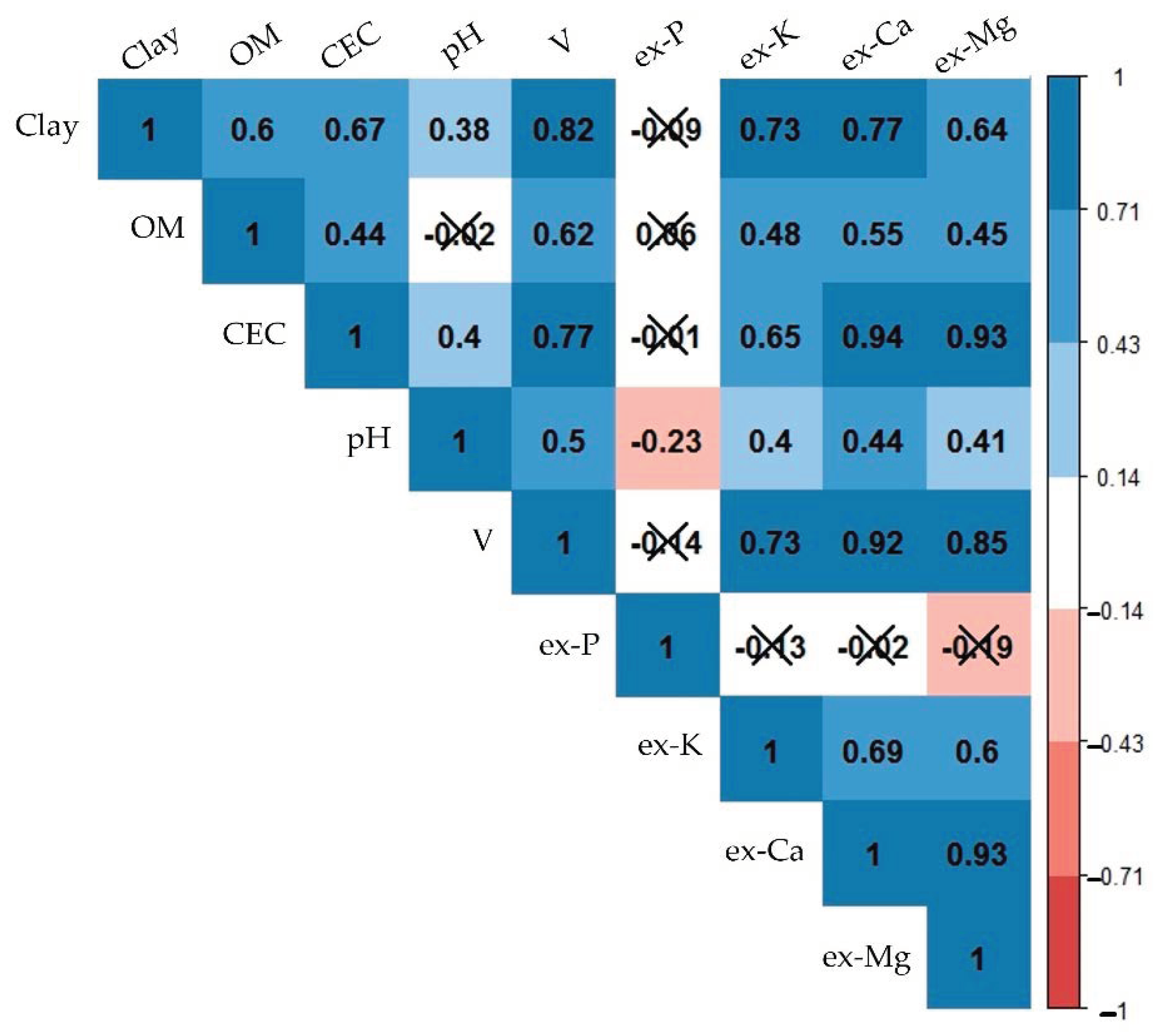
23]. In the present paper, CEC, V, ex-K, ex-Ca, and ex-Mg presented significant correlations with OM (0.44 ≤ r ≤ 0.62) and clay (0.64 ≤ r ≤ 0.82) (
Figure 4), which explain the successful predictions of such secondary attributes. In Brazilian tropical soils, different studies have reported satisfactory predictions for CEC, V, ex-K, ex-Ca, and ex-Mg using vis-NIR spectroscopy sensors, with R
2 values ranging from 0.46 to 0.92 for CEC [
17,
21,
74], from 0.56 to 0.79 for V [
74], from 0.61 to 0.94 for ex-K [
73,
78], from 0.42 to 0.74 for ex-Ca [
7,
17,
74], and from 0.41 to 0.81 for ex-Mg [
7,
17,
74].
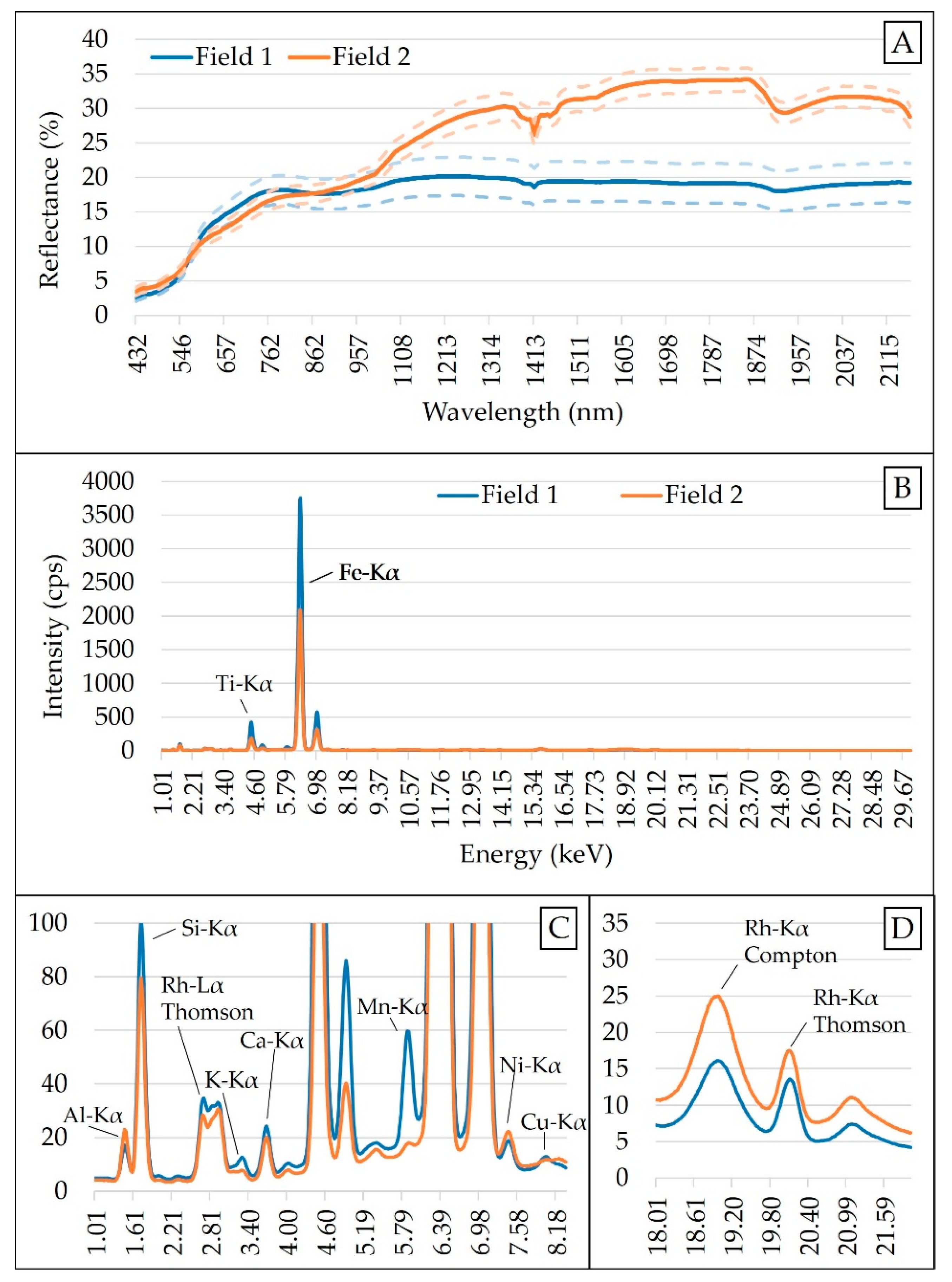
The excellent predictions of ex-K and ex-Ca with the XRF sensor were attributed to the relationship between the total and extractable contents of these elements that existed in the evaluated soil samples (r ≥ 0.90, shown in
Table A4, in the
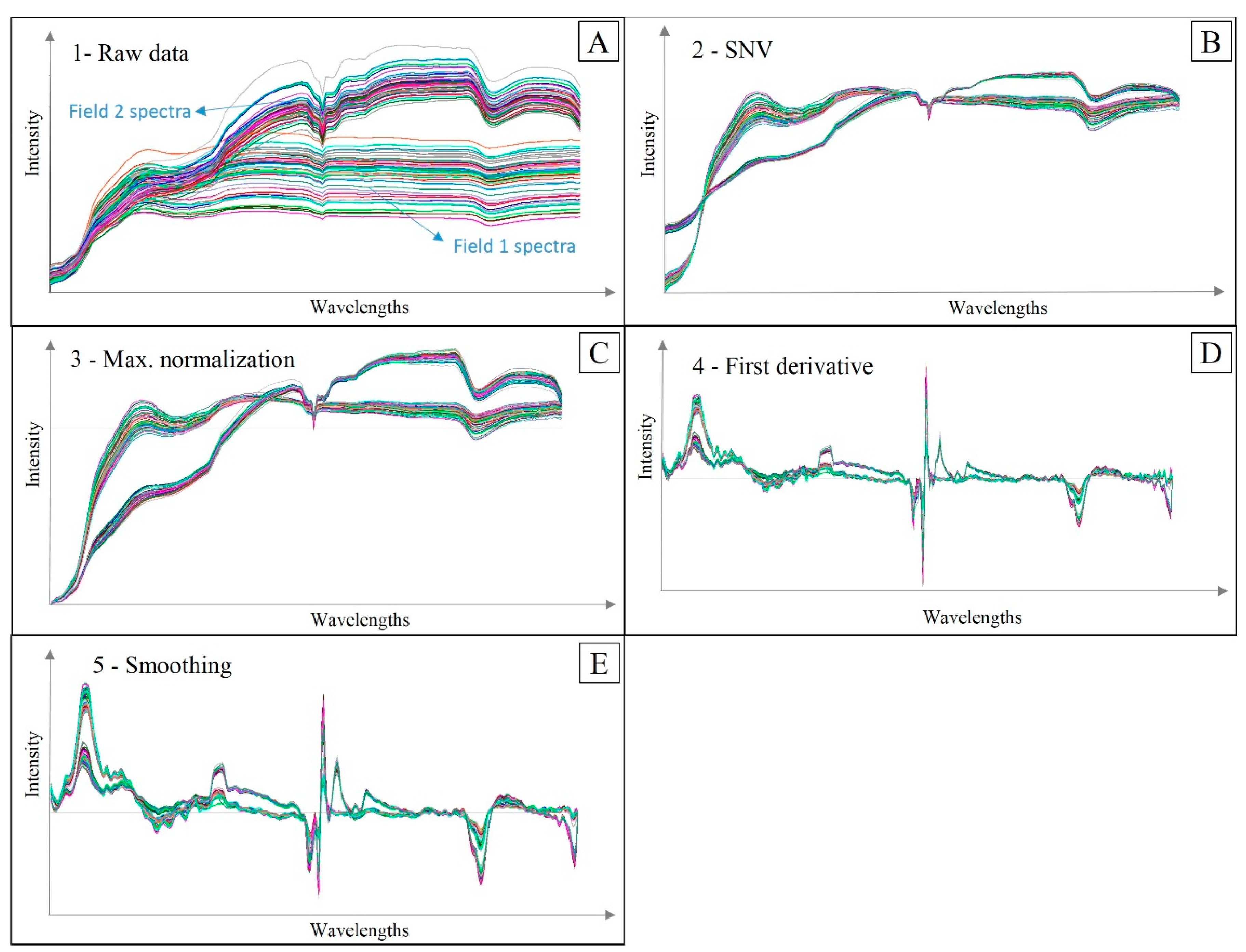
Appendix Section). It is also important to highlight that both K and Ca had clear emission lines in the XRF spectra (
Figure 2C). The high correlations (r ≥ 0.92) between ex-Ca and V, and CEC and ex-Mg (
Figure 4) explained the good and excellent predictions of these attributes, since they were not directly related to XRF spectra [
24]. Studies on the prediction of soil fertility attributes in Brazilian tropical soils using XRF sensor reported R
2 values ranging between 0.71 and 0.89 for ex-Ca [
31,
34,
36,
79], 0.04 and 0.81 for ex-K [
31,
34,
36], 0.08 and 0.89 for V [
31,
34], 0.75 and 0.86 for CEC [
24,
34], and between 0.60 and 0.85 for ex-Mg [
34,
36].
The prediction quality of pH and ex-P was not satisfactory with any individual sensor, which can be explained by their weak association with the attributes with direct signatures in vis-NIR and XRF spectra (e.g., OM and clay, for vis-NIR spectra, and ex-K, ex-Ca, and clay, for XRF spectra). The correlations between pH with the mentioned attributes were always low (r ≤ 0.44), whereas ex-P had a non-significant correlation with all mentioned attributes (clay, OM, ex-K, and ex-Ca).
In summary, the vis-NIR sensor showed the best results for clay and OM prediction (both had direct spectral responses in NIR range), while the XRF sensor showed the best predictive models for CEC, V, ex-K, ex-Ca, and ex-Mg. Thus, the combined use of both sensors, with individual prediction models using each sensor data alone (without using data fusion), allowed us to increase the range of soil fertility attributes determined with good and excellent predictions, emphasizing the complementary relationship of their data. Finally, it is important to comment that the individual instrument models evaluated in this work were performed using traditional linear prediction models, and more sophisticated nonlinear modeling methods (e.g., machine learning and computational models) should be considered in future works, especially to deal with datasets having larger number of samples and nonlinear spectral responses.
4.2. Performance of Data Fusion Approches
For eight out of nine soil fertility attributes (clay, CEC, pH, V, ex-P, ex-K, ex-Ca, and ex-Mg), the combined use of vis-NIR and XRF sensors using at least one of the six tested data fusion strategies allowed achieving higher prediction performances (with RI between 1 and 21%) compared to the best individual sensor performances (
Table 1). The only exception was for OM that did not show any improvement in its predictive performance using the tested data fusion strategies, which could be explained by the fact that the variance described by both sensors was not complementary for the OM characterization in our dataset. In this regard, it has been reported that data fusion will not necessarily result in optimal prediction accuracy, compared to individual sensors [
26,
42]. It is also interesting to highlight that although individual vis-NIR and XRF sensors for OM prediction did not show satisfactory performance (RPD ≥ 1.82), the corresponding data fusion models did not lead to any improvement in its predictive performance. On the other hand, though the prediction of pH and ex-P did not perform satisfactorily with the individual models, the models of both attributes showed a slight improvement in performance when using data fusion strategies. These results suggest that even if the vis-NIR and XRF sensors did not perform satisfactorily individually for a given attribute, their combined use could be synergistically positive for its prediction.
O’Rourke et al. [
26] reported RI ranging from 15 to 44% for clay, CEC, pH, ex-K, ex-Ca, and ex-Mg after model averaging data fusion procedures (e.g., GR and variance weighted averaging), using an Australian soil dataset. Evaluating the combined use of vis-NIR and XRF techniques through different data fusion approaches, Zhang and Hartemink [
53] obtained RI values of 12, 3, and 20% for clay, pH, and total carbon, respectively, for samples collected from different agricultural fields in the USA. A similar study in Chinese soils, reported an RI of 26% for CEC [
54]. The synergism observed for the predictive models is explained by the contrasting design of concept of the vis-NIR and XRF sensors and spectral signatures each soil attribute may have in each sensor spectral range, which allow different variations of the soil sample constituents to be characterized, and therefore allow fertility attributes to be better inferred [
38]. This feature also enables synergism for indirect characterizations, related to secondary attributes that are correlated to those with active spectral response, as seen for CEC, pH, V, and ex-Mg. It is worth noting that synergism existing in different information given by vis-NIR and XRF sensors should be exploited while taking the co-linearity and correlation among those data into account.
In general, the results obtained in this work did not identify a unique data fusion approach for exploiting the synergy between the sensors in order to predict all key fertility attributes successfully. With the exception of clay and pH, the prediction performance of data fusion models resulted in oscillated positive and negative RI values for the prediction of the same attribute. For example, the CEC prediction showed synergy with GR3 and LS3 approaches (RI = 2% for both), but its performance degraded when using GR2 (RI = −5%), LS2 (RI = −7), SF-PLS (RI = −8%), and SF-SVM (RI = −30%) models. Similarly, the V prediction accuracy improved for GR2 (RI = 10%) and LS2 (RI = 9%), while a negative RI was observed for GR3 (RI = −2%), LS3 (RI = −3%), and for both SF approaches (RI = −18% for both). The same happened for ex-P, ex-K, ex-Ca, and ex-Mg attributes. Generally speaking, the LS3 model averaging approach stood out as the best data fusion method that enabled greater number of attributes (six attributes) to be predicted with positive RI values (i.e., with better predictions, compared to the best performance obtained using a single sensor alone).
In fact, though GR and LS are conventional data fusion approaches with promising results for fusing data of vis-NIR and XRF sensors for soil analysis [
26,
48], they may not take advantage of all the information contained in multi-source spectra [
53]. On the other hand, front-end approaches (Front-end approaches are the fusion methods which consider all available information before subjecting them to any prediction model [
48,
53]), such as SF, attempt to make use of all available information by merging the full data. However, this trend was not endorsed by the results of our study that showed better prediction performances for the model averaging techniques compared to the tested front-end data fusion approaches (e.g., SF-PLS and SF-SVM). In this sense, a similar behavior was also observed by O’Rourke et al. [
26], who compared a front-end approach with one type of GR method. On the other hand, results by Xu et al. [
48] showed comparable prediction performances between model averaging approaches (i.e., GR approach) and the outer product analysis (OPA), which is also a front-end approach for the integration of vis-NIR and XRF sensor data. Further contrasting, recent research by Zhang and Hartemink [
53], which fused XRF and vis-NIR data using front-end approaches, successfully explored the synergy between sensors and achieved accurate prediction performance for soil TN and TC. The results observed in the literature clearly show that there is still no consensus on an optimal data fusion approach for vis-NIR and XRF sensor data for soil analysis. Moreover, they reinforce the hypothesis raised in this paper that the best data fusion approach might be attribute-specific.
The evaluation of the integrated use of vis-NIR and XRF sensors in tropical soils is still at its early stages of development, with the current work being the first to show a synoptic view of the potential and challenges associated with data fusion modeling for a complete characterization of key soil fertility attributes. It is undeniable that the integrated use of these sensors will be benefited if a generalized data fusion method is established, so that it can be adopted in future research. In this sense, the following suggestions are made for further research: (i) The need to assess front-end approaches, combined with more sophisticated modeling strategies, i.e., machine learning and computational models, especially for datasets with a large number of soil samples; and (ii) the need to evaluate back-end model averaging using methods that allow the estimation of the weights of each model to be optimized [
79,
80].
In the present scenario, one possible solution for selecting a data fusion method with optimal prediction performance is to evaluate the performance of different data fusion methods using independent subset of soil samples (independent validation). This evaluation should also include the performance of the individual models of each sensor, since data fusion models are not always the best performing when compared to individual models. The proposed strategy is similar to the one currently used for the selection of the best performing vis-NIR models for soil attribute prediction [
23].
To summarize, the results obtained in this work showed the possibility of synergism between vis-NIR and XRF sensors for the prediction of the studied fertility attributes in tropical soils. The main drawback observed was that the selection of the data fusion approach should be made for each attribute, since a single approach may not allow exploring the synergism between sensors for all the attributes of interest. This finding should encourage future research to better understand the behavior of vis-NIR and XRF data fusion methods for the characterization of fertility attributes, especially in tropical soils. Finding solutions to avoid the classic disadvantage of data fusion methods related to handling large volumes of data from multiple sensors/sources should be part of the future investigations.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





