An Improved Long-Period Precise Time-Relative Positioning Method Based on RTS Data


Abstract
:1. Introduction
2. Time-Relative Positioning Algorithm Based on TDCP Measurements
2.1. Mathematical Models of Time-Relative Positioning Method
2.2. Error Analysis
3. Improved Time-Relative Positioning Algorithm for Long-Period Precise Positioning
3.1. PPP Model Used with RTS Products
3.2. Time-Relative Positioning with the Constraints of IF Float Ambiguities
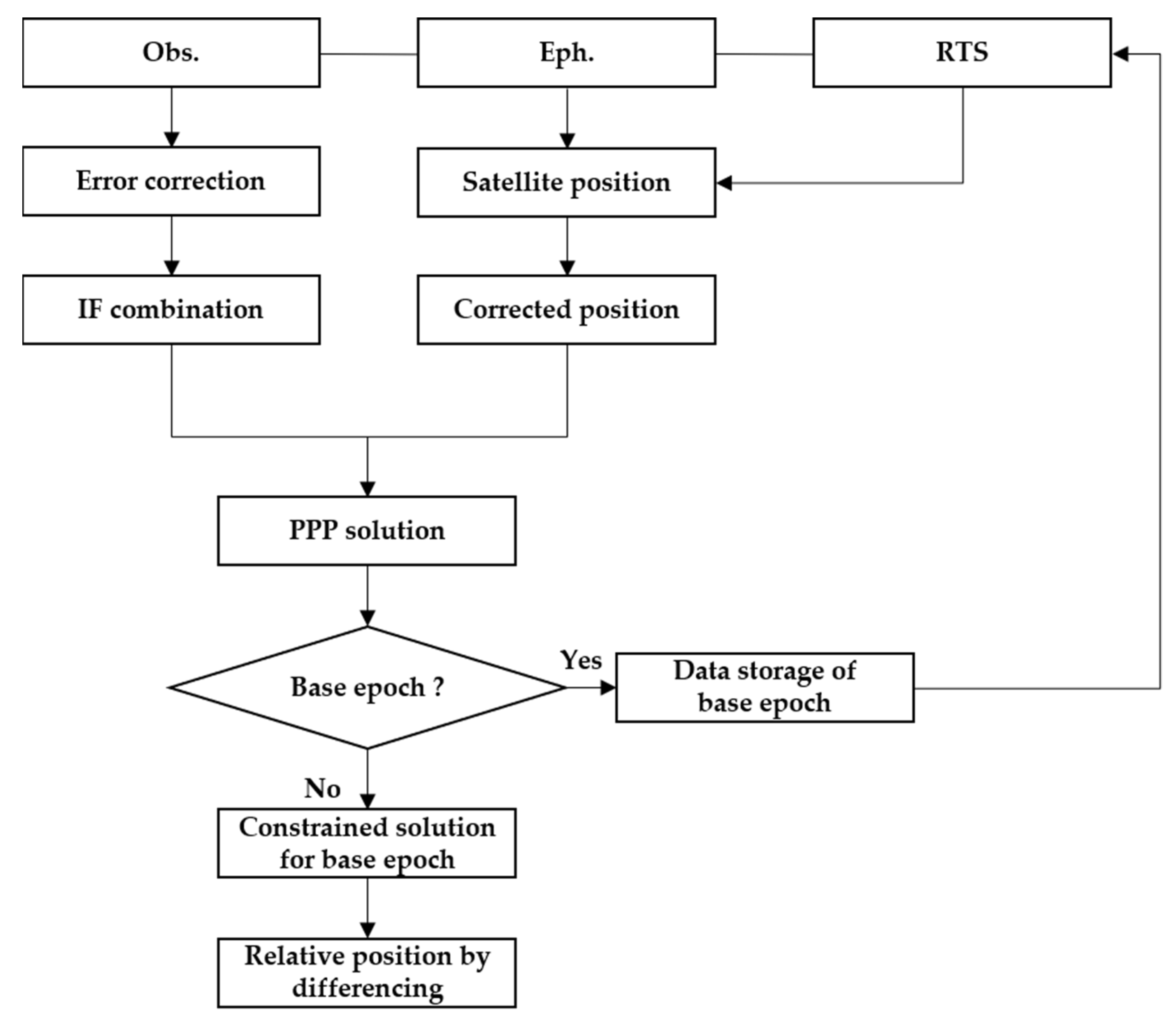
- (1)
- Calculation of satellite position by using the forecast ephemeris and its correction by means of RTS data;
- (2)
- Estimation of IF float ambiguities and user position by means of the robust Kalman filter based on the PPP model;
- (3)
- Estimation of user position by constraining the IF float ambiguities through the robust Kalman filter for the base epoch; the stochastic constraints are adopted in this work;
- (4)
- Calculation of the relative position of the current epoch, related to the base epoch, by differencing the estimated position of both epochs.
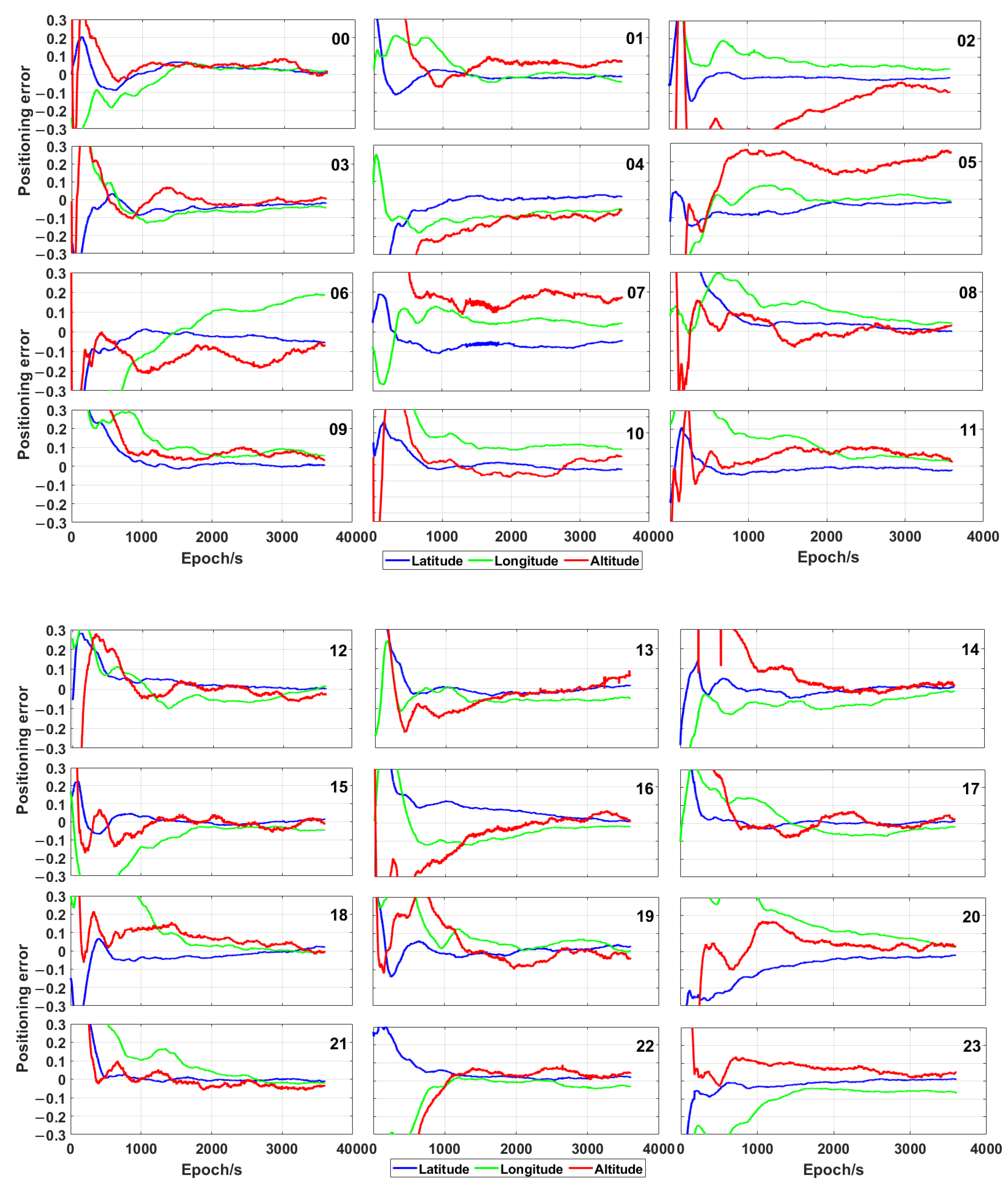
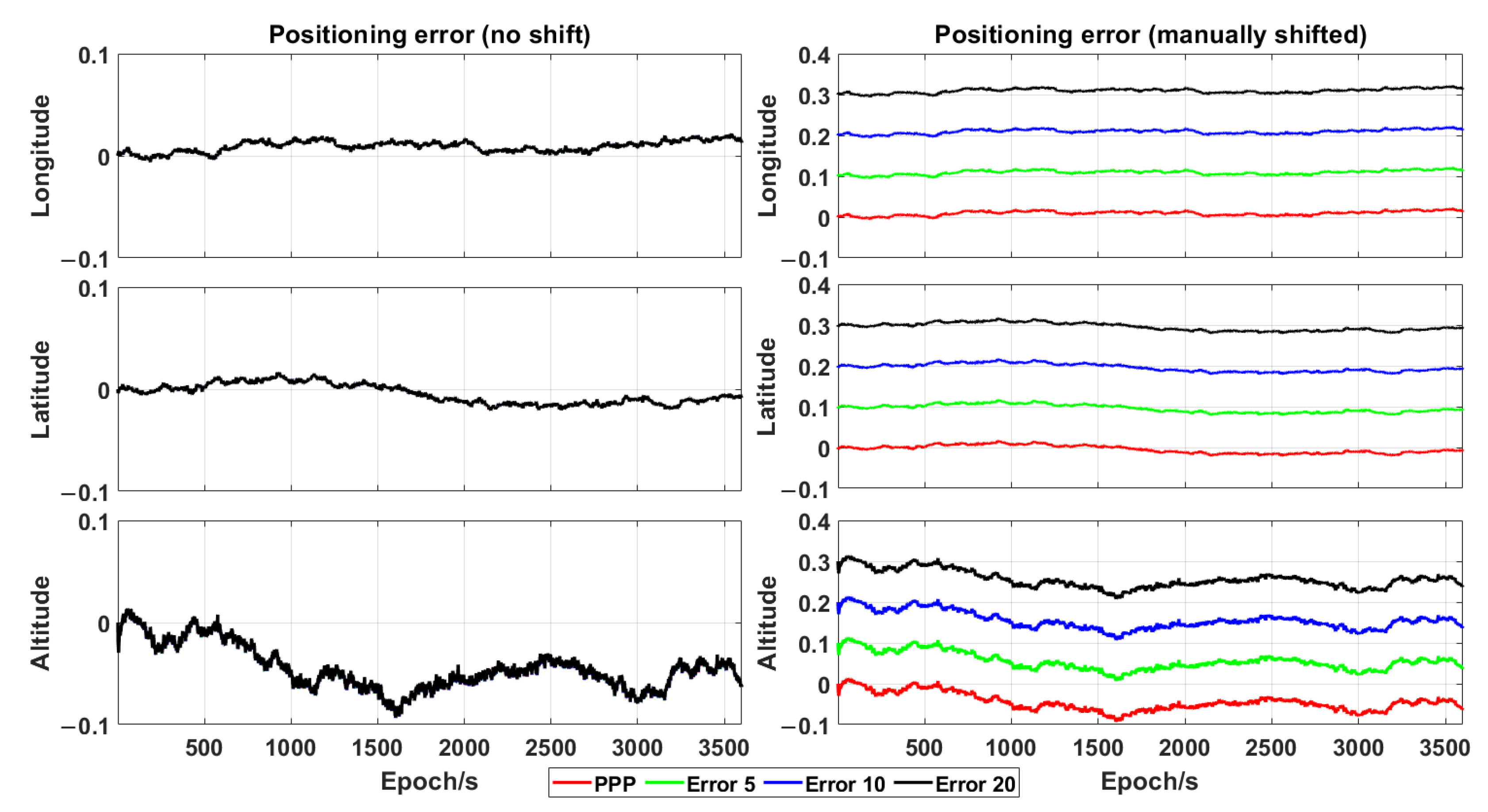
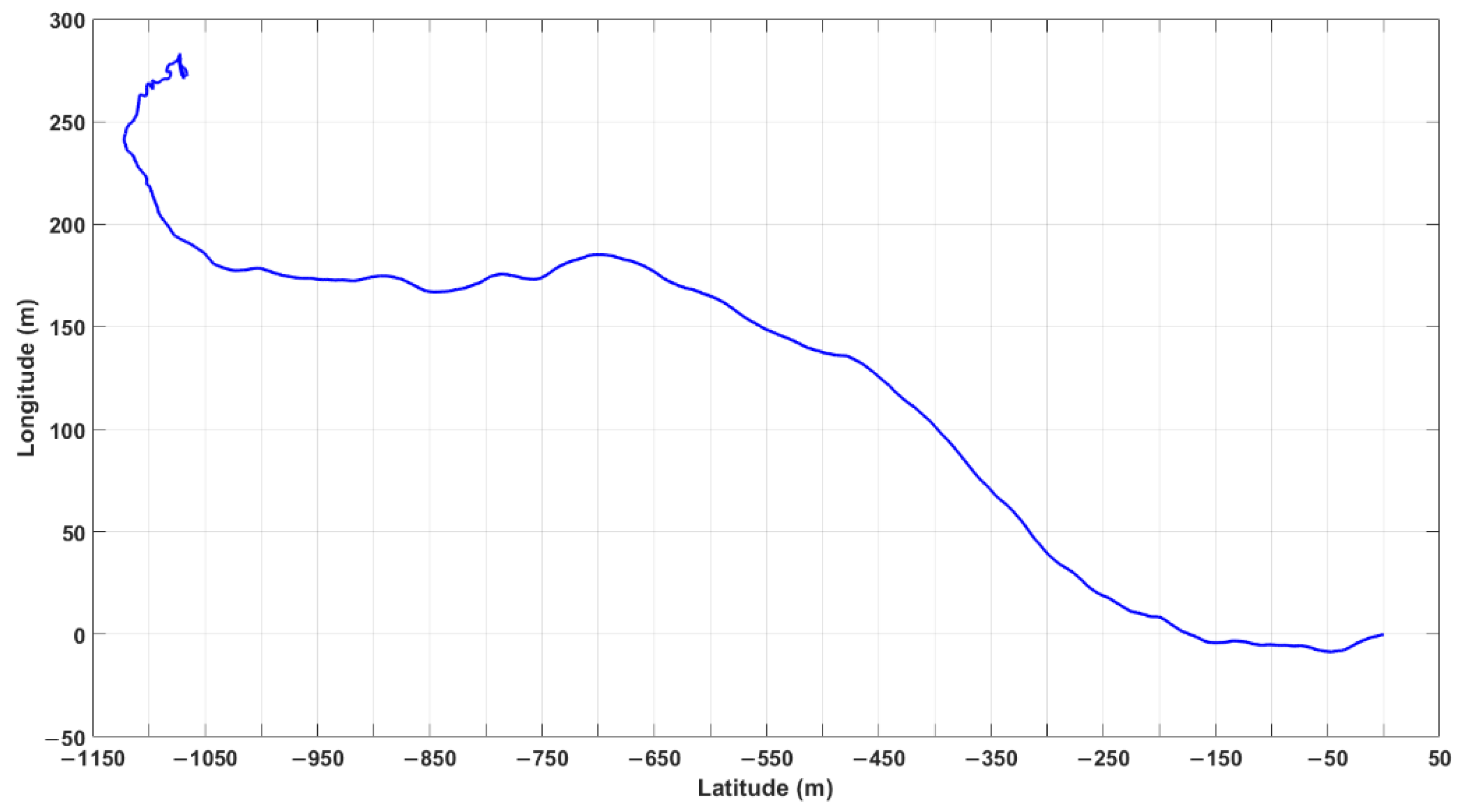
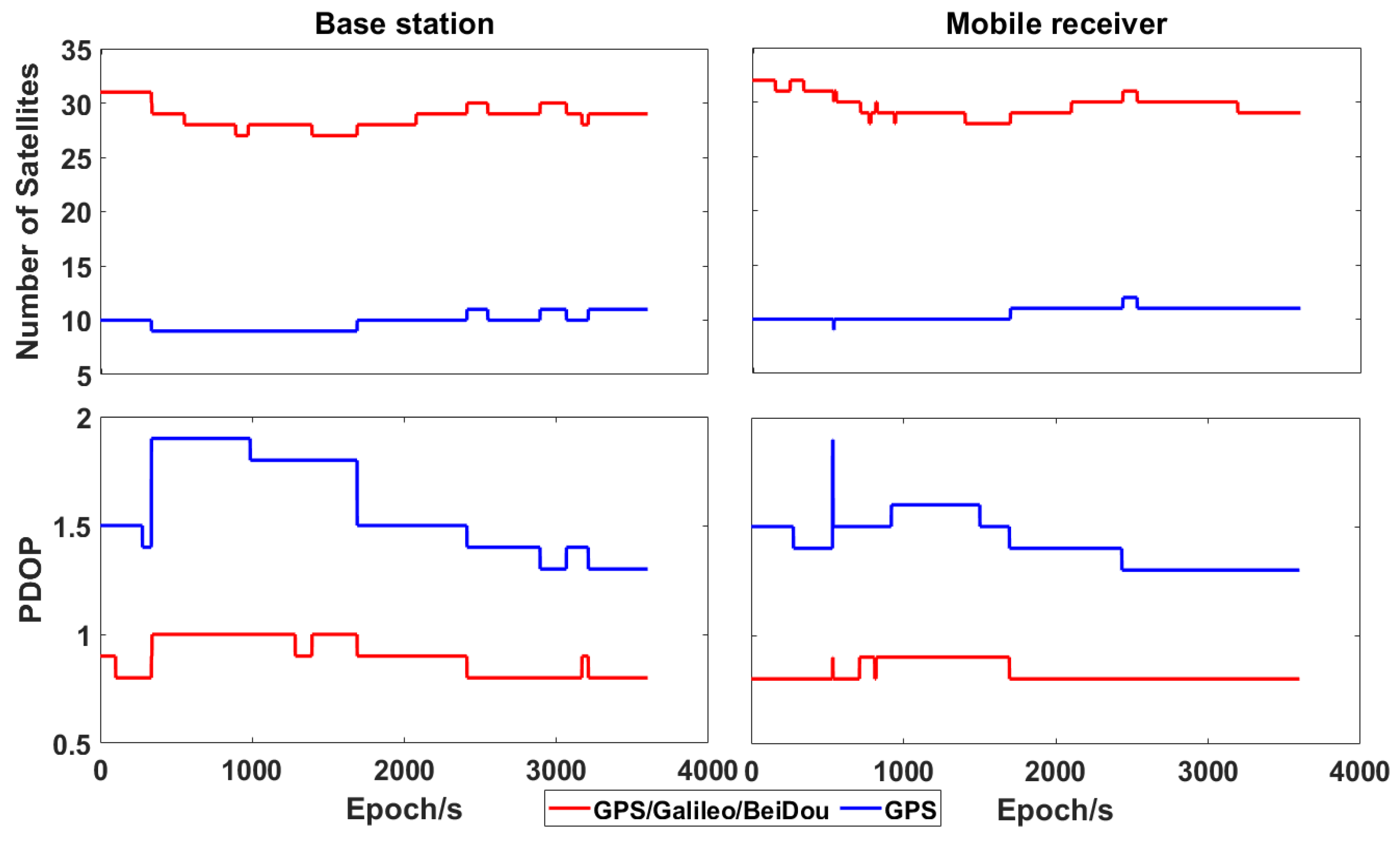
4. Experiments and Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Håkansson, M.; Jensen, A.B.; Horemuz, M.; Hedling, G. Review of code and phase biases in multi-GNSS positioning. GPS Solut. 2017, 21, 849–860. [Google Scholar] [CrossRef] [Green Version]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Brack, A.; Männel, B.; Schuh, H. GLONASS FDMA data for RTK positioning: A five-system analysis. GPS Solut. 2020, 25, 9. [Google Scholar] [CrossRef]
- Li, J.; Yang, Y.; He, H.; Guo, H. Benefits of BDS-3 B1C/B1I/B2a triple-frequency signals on precise positioning and ambiguity resolution. GPS Solut. 2020, 24, 100. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S. Real-time PPP-RTK performance analysis using ionospheric corrections from multi-scale network configurations. Sensors 2020, 20, 3012. [Google Scholar] [CrossRef]
- Teunissen, P.; Odijk, D.; Zhang, B. PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. Ser. A 2010, 42, 223–230. [Google Scholar]
- Dai, L.; Eslinger, D.; Sharpe, T. Innovative algorithms to improve long range RTK reliability and availability. In Proceedings of the ION NTM, San Diego, CA, USA, 22–24 January 2007. [Google Scholar]
- Pan, L.; Gao, X.; Hu, J.; Ma, F.; Zhang, Z.; Wu, W. Performance assessment of real-time multi-GNSS integrated PPP with uncombined and ionospheric-free combined observables. In Advances in Space Research; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Odijk, D.; Khodabandeh, A.; Nadarajah, N.; Choudhury, M.; Zhang, B.; Li, W.; Teunissen, P.J. PPP-RTK by means of S-system theory: Australian network and user demonstration. J. Spat. Sci. 2016, 62, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, W.; Ruan, R.; Liu, X. Evaluation of PPP-RTK based on BDS-3/BDS-2/GPS observations: A case study in Europe. GPS Solut. 2020, 24, 38. [Google Scholar] [CrossRef]
- Zhao, Y. Applying time-differenced carrier phase in nondifferential GPS/IMU tightly coupled navigation systems to improve the positioning performance. IEEE Trans. Veh. Technol. 2017, 66, 992–1003. [Google Scholar] [CrossRef]
- Michaud, S.; Santerre, R. Time-relative positioning with a single civil GPS receiver. GPS Solut. 2001, 5, 71–77. [Google Scholar] [CrossRef]
- Balard, N.; Santerre, R.; Cocard, M.; Bourgon, S. Single GPS receiver time-relative positioning with loop misclosure corrections. GPS Solut. 2006, 10, 56–62. [Google Scholar] [CrossRef]
- Ulmer, K.; Hwang, P.; Disselkoen, B.; Wagner, M. Accurate azimuth from a single PLGR + GLS DoD GPS receiver using time relative positioning. In Proceedings of the 8th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995. [Google Scholar]
- Traugott, J. Precise Flight Trajectory Reconstruction Based on Time-Differential GNSS Carrier Phase Processing. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2010. [Google Scholar]
- Liu, Z.; Ji, S.; Chen, W.; Ding, X. New fast precise kinematic surveying method using a single dual-frequency GPS receiver. J. Surv. Eng. 2013, 139, 19–33. [Google Scholar] [CrossRef]
- Ji, S.; Sun, Z.; Weng, D.; Chen, W.; Wang, Z.; He, K. High-precision Ocean navigation with single set of BeiDou short-message device. J. Geod. 2019, 93, 1589–1602. [Google Scholar] [CrossRef]
- Yu, W.; Ding, X.; Chen, W.; Dai, W.; Yi, Z.; Zhang, B. Precise point positioning with mixed use of time-differenced and undifferenced carrier phase from multiple GNSS. J. Geod. 2019, 93, 809–818. [Google Scholar] [CrossRef]
- Wendel, J.; Meister, O.; Monikes, R.; Trommer, G.F. Time-differenced carrier phase measurements for tightly coupled GPS/INS integration. In Proceedings of the IEEE/ION PLANS, San Diego, CA, USA, 25–27 April 2006; Volume 2006, pp. 54–60. [Google Scholar]
- Soon, B.K.; Scheding, S.; Lee, H.K.; Lee, H.K.; Durrant-Whyte, H. An approach to aid INS using time-differenced GPS carrier phase (TDCP) measurements. GPS Solut. 2008, 12, 261–271. [Google Scholar] [CrossRef]
- Suzuki, T. Time-relative RTK-GNSS: GNSS loop closure in pose graph optimization. IEEE Robot. Autom. Lett. 2020, 5, 4735–4742. [Google Scholar] [CrossRef]
- Sun, R.; Cheng, Q.; Junhui, W. Precise vehicle dynamic heading and pitch angle estimation using time-differenced measurements from a single GNSS antenna. GPS Solut. 2020, 24, 1–9. [Google Scholar] [CrossRef]
- Colosimo, G.; Crespi, M.; Mazzoni, A. Real-time GPS seismology with a stand-alone receiver: A preliminary feasibility demonstration. J. Geophys. Res. Solid Earth 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ge, M.; Guo, B.; Wickert, J.; Schuh, H. Temporal point positioning approach for real-time GNSS seismology using a single receiver. Geophys. Res. Lett. 2013, 40, 5677–5682. [Google Scholar] [CrossRef] [Green Version]
- Han, S.; Rizos, C. Centimeter GPS kinematic or rapid static surveys without ambiguity resolution. Surv. Land Inf. Syst. 1996, 56, 143–148. [Google Scholar]
- Olynik, M.; Petovello, M.G.; Cannon, M.E.; Lachapelle, G. Temporal variability of GPS error sources and their effect on relative positioning accuracy. In Proceedings of the Institute of Navigation National Technical Meeting, San Diego, CA, USA, 28–30 January 2002. [Google Scholar]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Abdelazeem, M.; Çelik, R.N.; El-Rabbany, A. An enhanced real-time regional ionospheric model using IGS real-time service (IGS-RTS) products. J. Navig. 2016, 69, 521–530. [Google Scholar] [CrossRef] [Green Version]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time precise point positioning using IGS real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Lu, Y.; Wang, Z.; Ji, S.; Chen, W. Assessing the positioning performance under the effects of strong ionospheric anomalies with multi-GNSS in Hong Kong. Radio Sci. 2020, 55, e2019RS007004. [Google Scholar] [CrossRef]
- Tregoning, P.; Herring, T. Impact of a priori zenith hydrostatic delay errors on GPS estimates of station heights and zenith total delays. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. Bull. Géodésique (1946–1975) 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef]
- Hadas, T.; Teferle, F.N.; Kazmierski, K.; Hordyniec, P.; Bosy, J. Optimum stochastic modeling for GNSS tropospheric delay estimation in real-time. GPS Solut. 2016, 21, 1069–1081. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Gao, Y. A comparison of three PPP integer ambiguity resolution methods. GPS Solut. 2014, 18, 519–528. [Google Scholar] [CrossRef]
- Shi, J.; Yuan, X.; Cai, Y.; Wang, G. GPS real-time precise point positioning for aerial triangulation. GPS Solut. 2017, 21, 405–414. [Google Scholar] [CrossRef]
- Liu, Z. A new automated cycle slip detection and repair method for a single dual-frequency GPS receiver. J. Geod. 2011, 85, 171–183. [Google Scholar] [CrossRef]
- Deo, M.; El-Mowafy, A.; Professor, A. Cycle slip and clock jump repair with multi-frequency multi-constellation GNSS data for precise point positioning. In Proceedings of the IGNSS Symposium, Queensland, Australia, 14–16 July 2015. [Google Scholar]
- Zhang, H.; Ji, S.; Wang, Z.; Chen, W. Detailed assessment of GNSS observation noise based using zero baseline data. Adv. Space Res. 2018, 62, 2454–2466. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.; Li, W.; Jiang, X.; Wickert, J.; Schuh, H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 33. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean | STD | RMS | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Time (h) | Latitude | Longitude | Altitude | Latitude | Longitude | Altitude | Latitude | Longitude | Altitude |
| 0 | 0.006 | 0.026 | −0.056 | 0.005 | 0.015 | 0.039 | 0.008 | 0.029 | 0.069 |
| 1 | 0.026 | 0.019 | 0.026 | 0.018 | 0.016 | 0.062 | 0.031 | 0.025 | 0.067 |
| 2 | 0.037 | −0.021 | 0.009 | 0.018 | 0.020 | 0.046 | 0.041 | 0.029 | 0.047 |
| 3 | −0.012 | −0.001 | −0.037 | 0.011 | 0.020 | 0.028 | 0.016 | 0.020 | 0.046 |
| 4 | −0.002 | −0.017 | −0.013 | 0.023 | 0.017 | 0.048 | 0.023 | 0.024 | 0.050 |
| 5 | 0.036 | −0.002 | −0.005 | 0.017 | 0.015 | 0.044 | 0.039 | 0.015 | 0.044 |
| 6 | −0.069 | 0.001 | 0.011 | 0.031 | 0.012 | 0.036 | 0.076 | 0.012 | 0.038 |
| 7 | 0.016 | 0.006 | 0.017 | 0.014 | 0.023 | 0.063 | 0.021 | 0.024 | 0.065 |
| 8 | −0.006 | −0.015 | −0.053 | 0.010 | 0.023 | 0.046 | 0.012 | 0.027 | 0.070 |
| 9 | −0.014 | 0.000 | −0.008 | 0.012 | 0.007 | 0.030 | 0.018 | 0.007 | 0.031 |
| 10 | 0.011 | −0.014 | −0.010 | 0.013 | 0.014 | 0.020 | 0.017 | 0.020 | 0.022 |
| 11 | −0.007 | 0.000 | −0.010 | 0.005 | 0.008 | 0.047 | 0.009 | 0.008 | 0.048 |
| 12 | −0.010 | 0.006 | −0.016 | 0.010 | 0.007 | 0.023 | 0.014 | 0.009 | 0.028 |
| 13 | −0.018 | 0.016 | 0.023 | 0.023 | 0.017 | 0.042 | 0.029 | 0.023 | 0.048 |
| 14 | 0.007 | 0.000 | −0.054 | 0.010 | 0.021 | 0.059 | 0.012 | 0.021 | 0.080 |
| 15 | 0.010 | 0.009 | 0.018 | 0.024 | 0.011 | 0.080 | 0.026 | 0.014 | 0.082 |
| 16 | −0.023 | 0.013 | −0.083 | 0.020 | 0.015 | 0.067 | 0.030 | 0.020 | 0.107 |
| 17 | 0.004 | 0.021 | −0.003 | 0.011 | 0.025 | 0.051 | 0.012 | 0.033 | 0.051 |
| 18 | −0.037 | 0.003 | −0.024 | 0.028 | 0.016 | 0.076 | 0.046 | 0.016 | 0.080 |
| 19 | −0.024 | −0.032 | 0.027 | 0.016 | 0.024 | 0.036 | 0.029 | 0.040 | 0.045 |
| 20 | 0.076 | 0.009 | 0.086 | 0.030 | 0.025 | 0.080 | 0.081 | 0.027 | 0.118 |
| 21 | 0.004 | −0.002 | 0.006 | 0.004 | 0.011 | 0.035 | 0.006 | 0.011 | 0.036 |
| 22 | 0.026 | 0.017 | −0.026 | 0.029 | 0.023 | 0.028 | 0.040 | 0.029 | 0.039 |
| 23 | −0.016 | 0.003 | −0.020 | 0.011 | 0.012 | 0.025 | 0.019 | 0.012 | 0.032 |
| Mean | STD | RMS | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Time (h) | Latitude | Longitude | Altitude | Latitude | Longitude | Altitude | Latitude | Longitude | Altitude |
| 0 | 0.010 | −0.004 | −0.048 | 0.005 | 0.009 | 0.021 | 0.011 | 0.010 | 0.052 |
| 1 | 0.007 | −0.013 | 0.003 | 0.006 | 0.011 | 0.012 | 0.009 | 0.017 | 0.013 |
| 2 | −0.008 | 0.030 | 0.027 | 0.007 | 0.010 | 0.024 | 0.011 | 0.031 | 0.036 |
| 3 | −0.037 | 0.000 | −0.006 | 0.020 | 0.017 | 0.025 | 0.042 | 0.017 | 0.026 |
| 4 | 0.013 | −0.007 | −0.004 | 0.025 | 0.008 | 0.030 | 0.028 | 0.011 | 0.030 |
| 5 | 0.029 | 0.015 | −0.004 | 0.016 | 0.008 | 0.018 | 0.033 | 0.017 | 0.019 |
| 6 | −0.023 | 0.004 | −0.001 | 0.010 | 0.008 | 0.024 | 0.025 | 0.009 | 0.024 |
| 7 | 0.021 | 0.007 | 0.014 | 0.010 | 0.012 | 0.019 | 0.023 | 0.014 | 0.024 |
| 8 | 0.005 | 0.016 | −0.015 | 0.008 | 0.008 | 0.019 | 0.010 | 0.018 | 0.024 |
| 9 | −0.012 | −0.001 | −0.007 | 0.010 | 0.010 | 0.014 | 0.016 | 0.010 | 0.016 |
| 10 | 0.004 | −0.027 | 0.003 | 0.011 | 0.016 | 0.016 | 0.012 | 0.032 | 0.017 |
| 11 | −0.026 | −0.015 | 0.002 | 0.012 | 0.010 | 0.018 | 0.029 | 0.018 | 0.018 |
| 12 | −0.006 | −0.009 | −0.015 | 0.005 | 0.011 | 0.022 | 0.008 | 0.014 | 0.027 |
| 13 | −0.016 | 0.024 | −0.035 | 0.015 | 0.012 | 0.027 | 0.022 | 0.027 | 0.044 |
| 14 | 0.019 | 0.006 | −0.015 | 0.010 | 0.009 | 0.018 | 0.022 | 0.011 | 0.024 |
| 15 | 0.002 | 0.006 | 0.035 | 0.010 | 0.006 | 0.024 | 0.010 | 0.009 | 0.042 |
| 16 | −0.015 | 0.002 | −0.034 | 0.014 | 0.006 | 0.022 | 0.021 | 0.006 | 0.040 |
| 17 | −0.005 | −0.004 | −0.021 | 0.010 | 0.009 | 0.030 | 0.012 | 0.010 | 0.037 |
| 18 | −0.031 | 0.021 | −0.034 | 0.024 | 0.017 | 0.016 | 0.040 | 0.027 | 0.038 |
| 19 | 0.005 | −0.014 | 0.005 | 0.010 | 0.011 | 0.029 | 0.011 | 0.017 | 0.029 |
| 20 | 0.058 | −0.042 | −0.016 | 0.018 | 0.015 | 0.047 | 0.061 | 0.045 | 0.050 |
| 21 | 0.008 | 0.002 | −0.013 | 0.004 | 0.005 | 0.010 | 0.009 | 0.005 | 0.016 |
| 22 | 0.000 | −0.003 | −0.014 | 0.005 | 0.007 | 0.010 | 0.005 | 0.008 | 0.017 |
| 23 | −0.006 | 0.006 | 0.012 | 0.005 | 0.005 | 0.027 | 0.008 | 0.008 | 0.029 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Ji, S.; Tu, R.; Weng, D.; Lu, X.; Chen, W. An Improved Long-Period Precise Time-Relative Positioning Method Based on RTS Data. Sensors 2021, 21, 53. https://doi.org/10.3390/s21010053
Lu Y, Ji S, Tu R, Weng D, Lu X, Chen W. An Improved Long-Period Precise Time-Relative Positioning Method Based on RTS Data. Sensors. 2021; 21(1):53. https://doi.org/10.3390/s21010053
Chicago/Turabian StyleLu, Yangwei, Shengyue Ji, Rui Tu, Duojie Weng, Xiaochun Lu, and Wu Chen. 2021. "An Improved Long-Period Precise Time-Relative Positioning Method Based on RTS Data" Sensors 21, no. 1: 53. https://doi.org/10.3390/s21010053