
Asymmetric Gait Analysis Using a DTW Algorithm with Combined Gyroscope and Pressure Sensor


Abstract
:1. Introduction
2. Materials and Methods
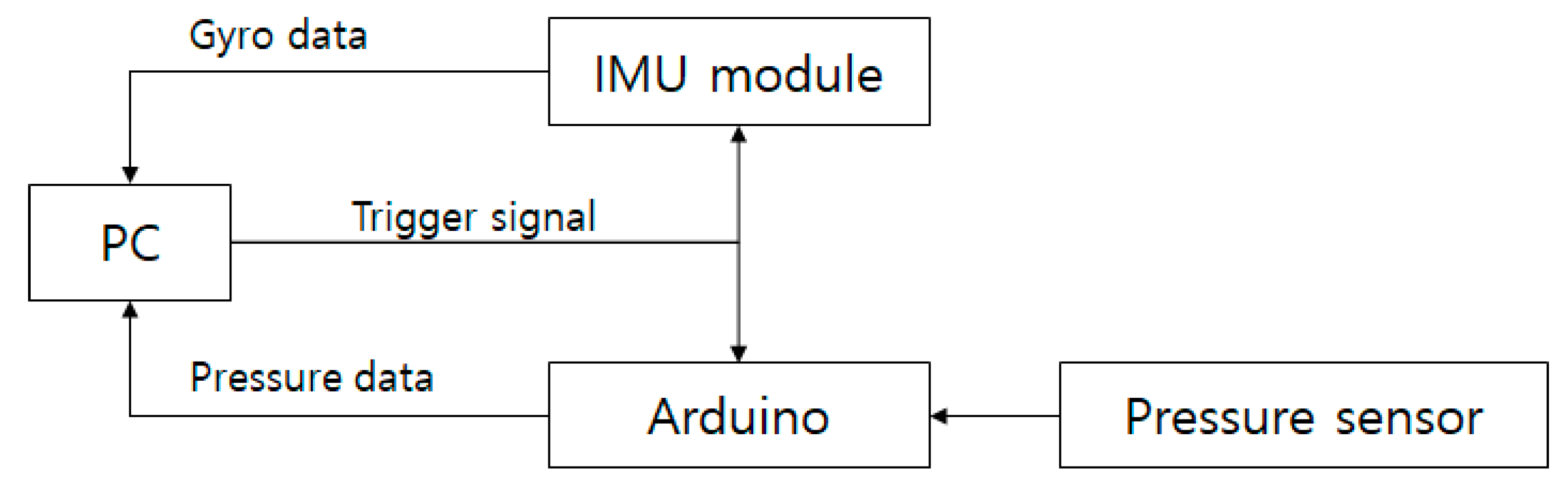
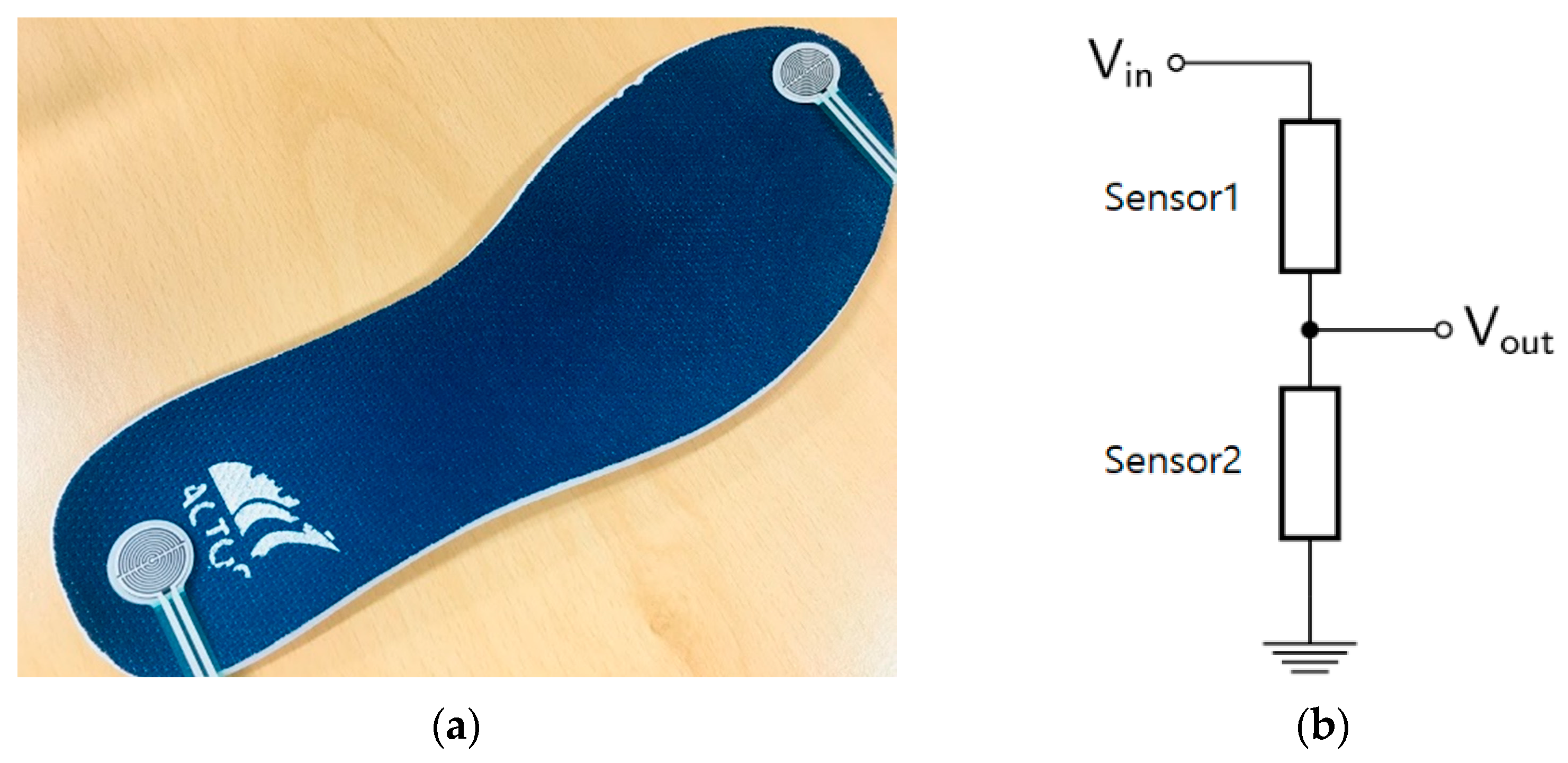
2.1. Sensor Installation and Data Acquisition
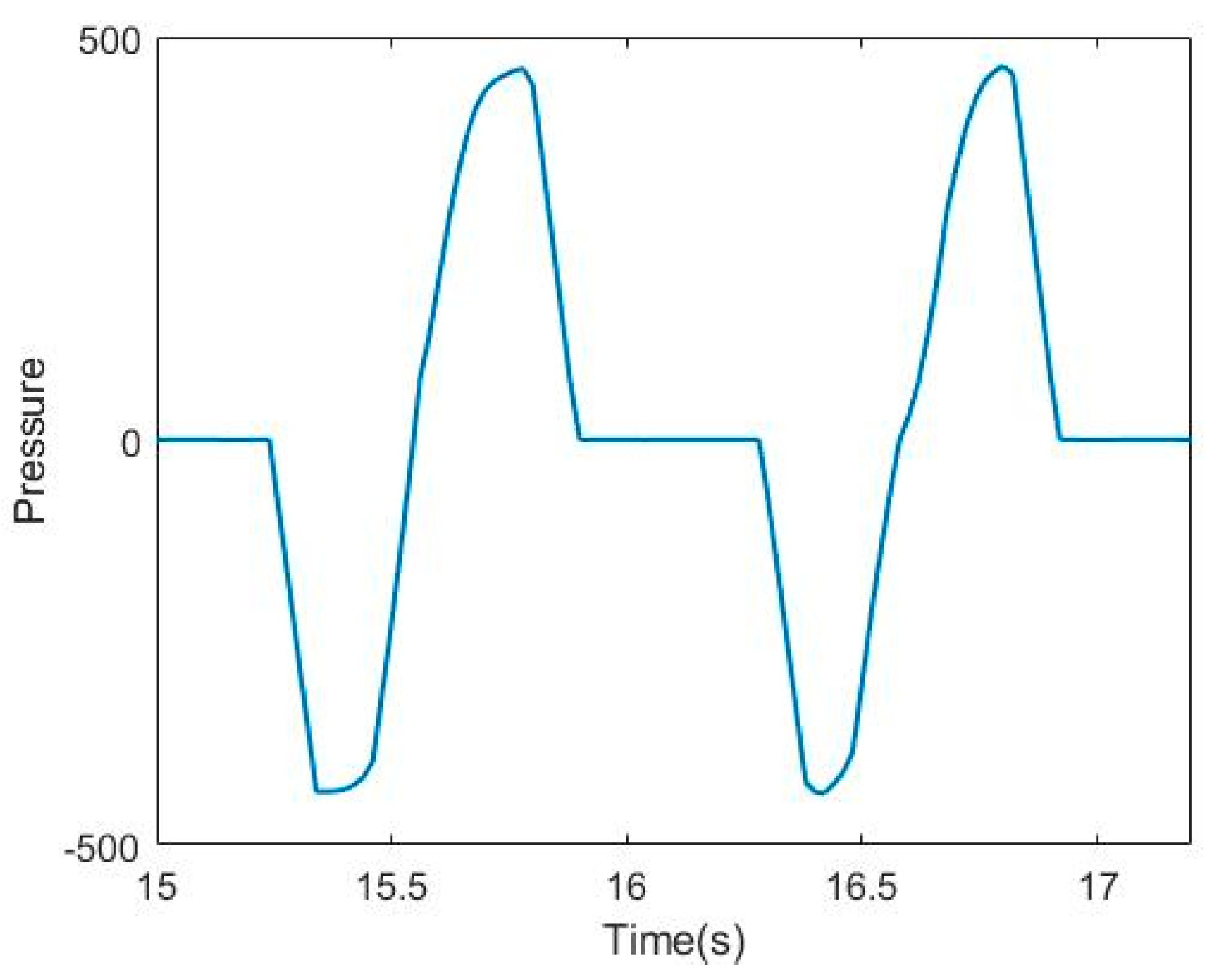
2.2. Signal Processing for Asymmetric Analysis
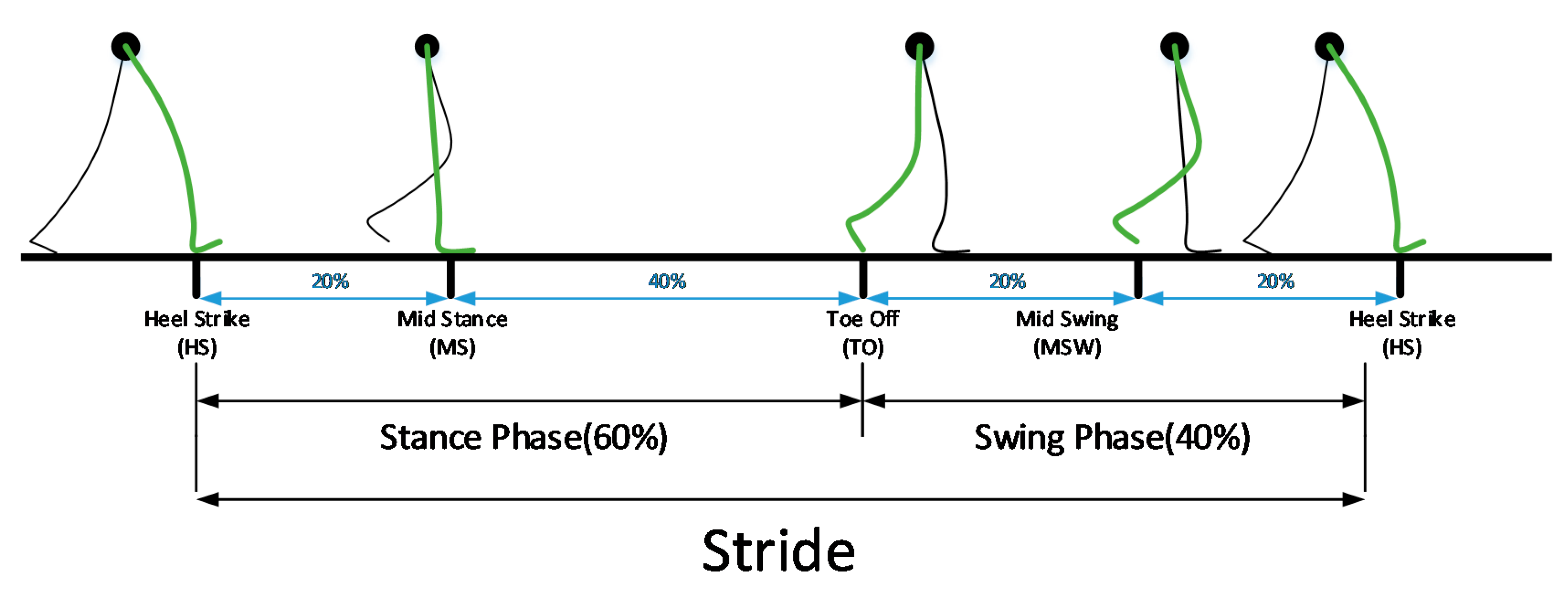
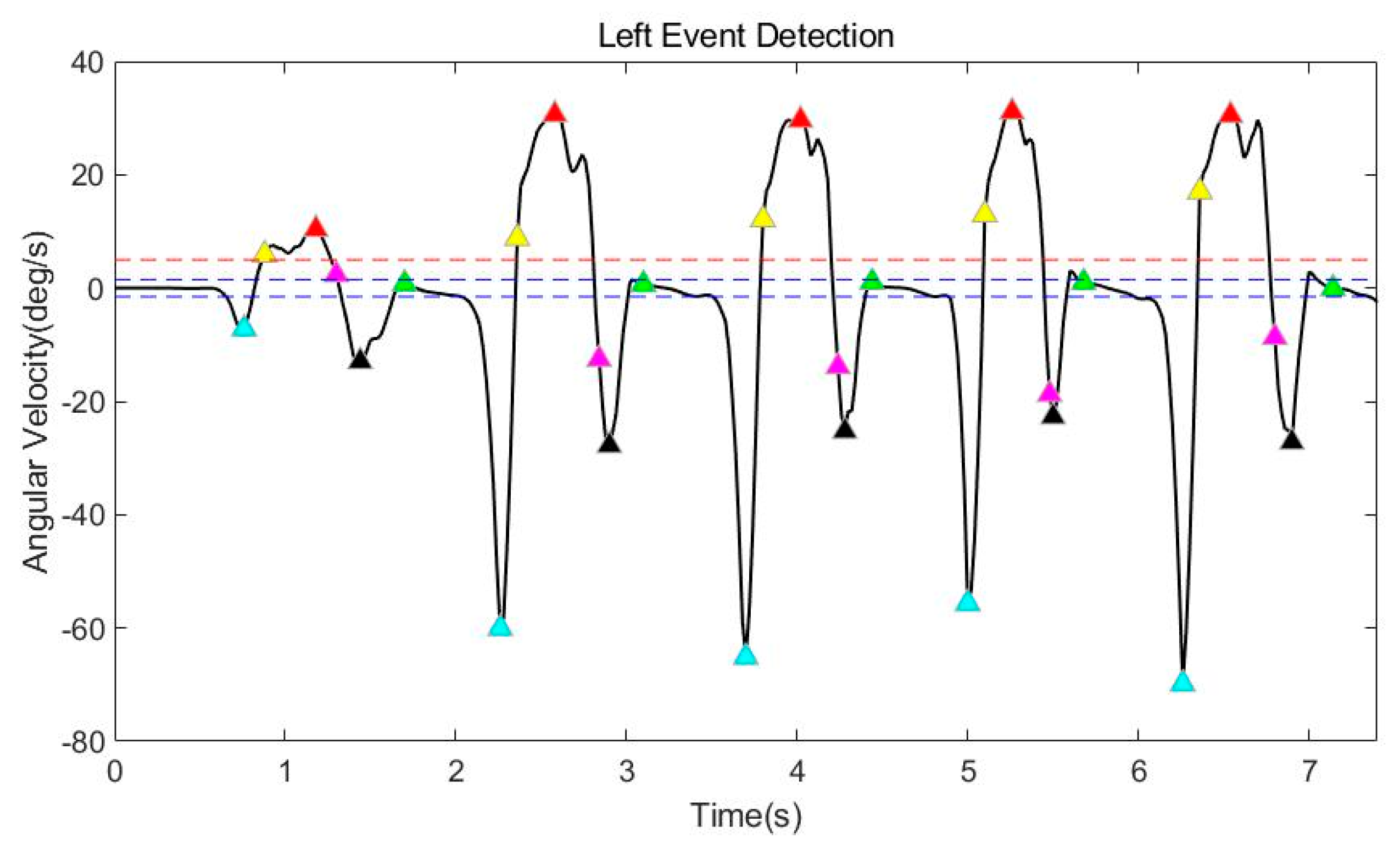
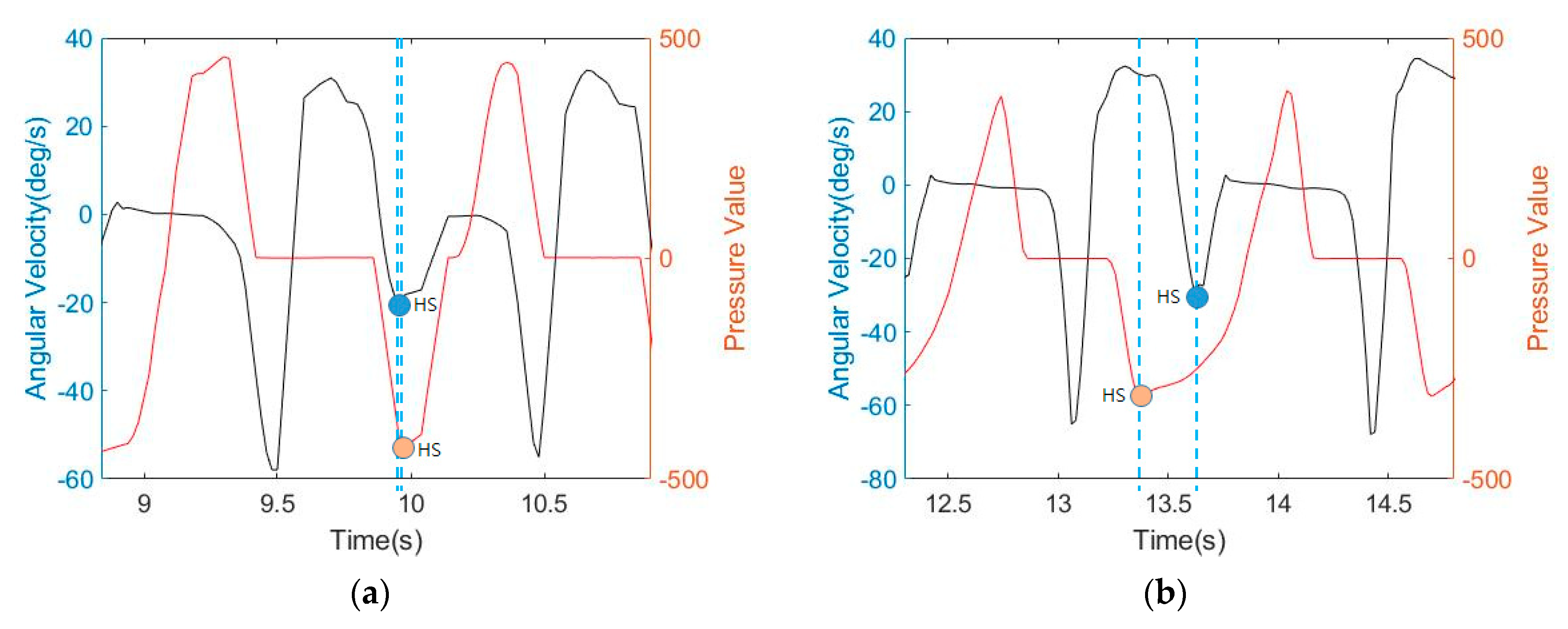
2.2.1. Rule-Based Event Detection
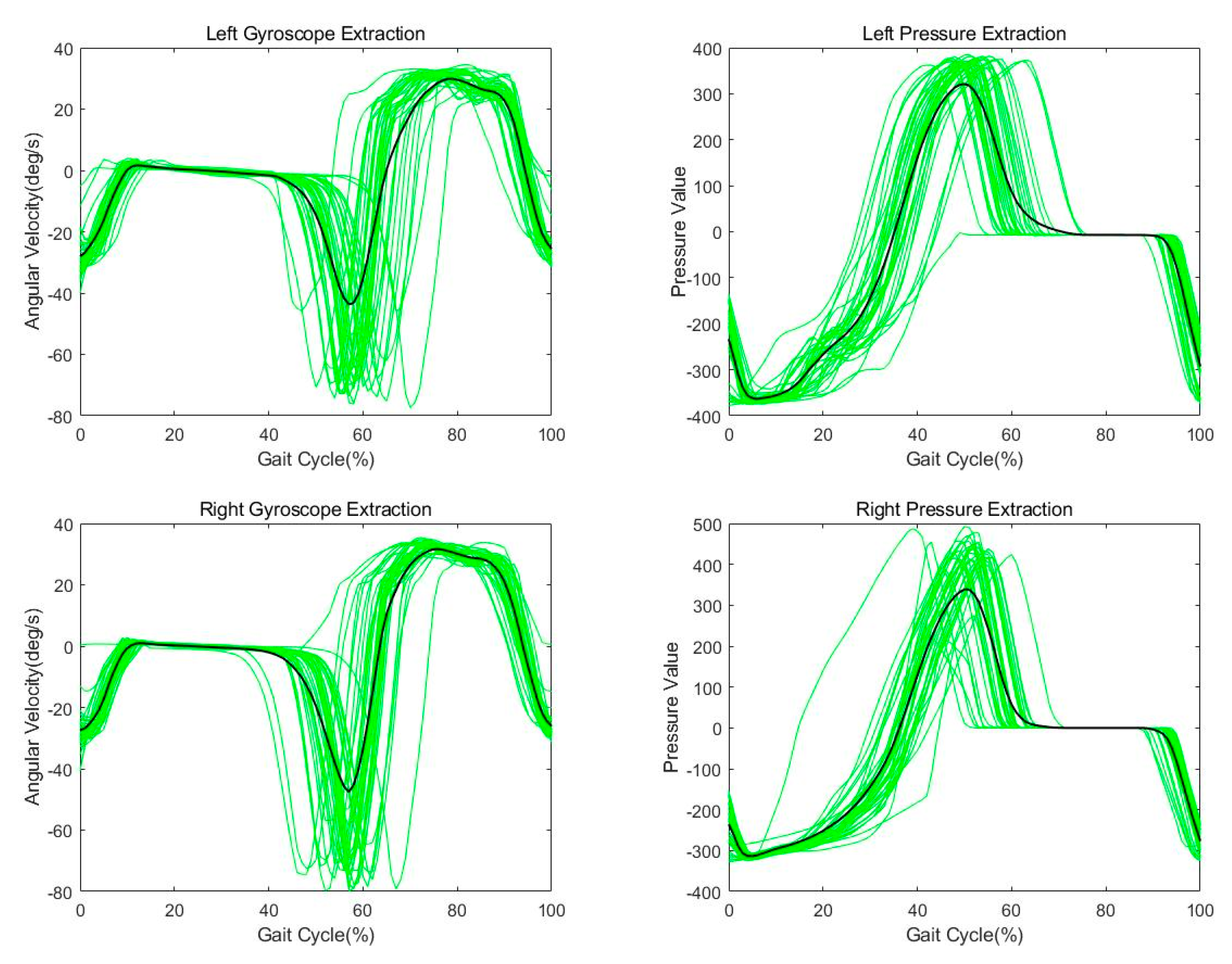
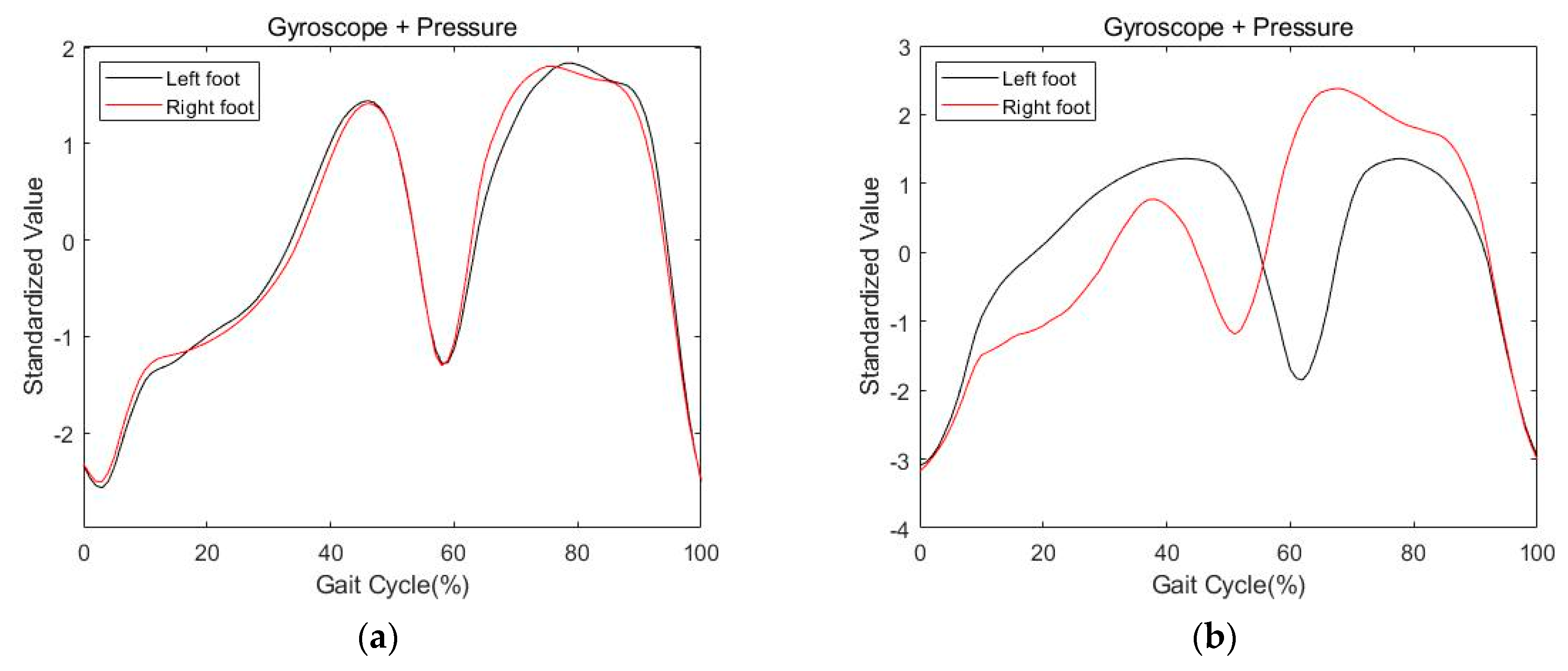
2.2.2. Stride Extraction and Resampling and Data Fusion
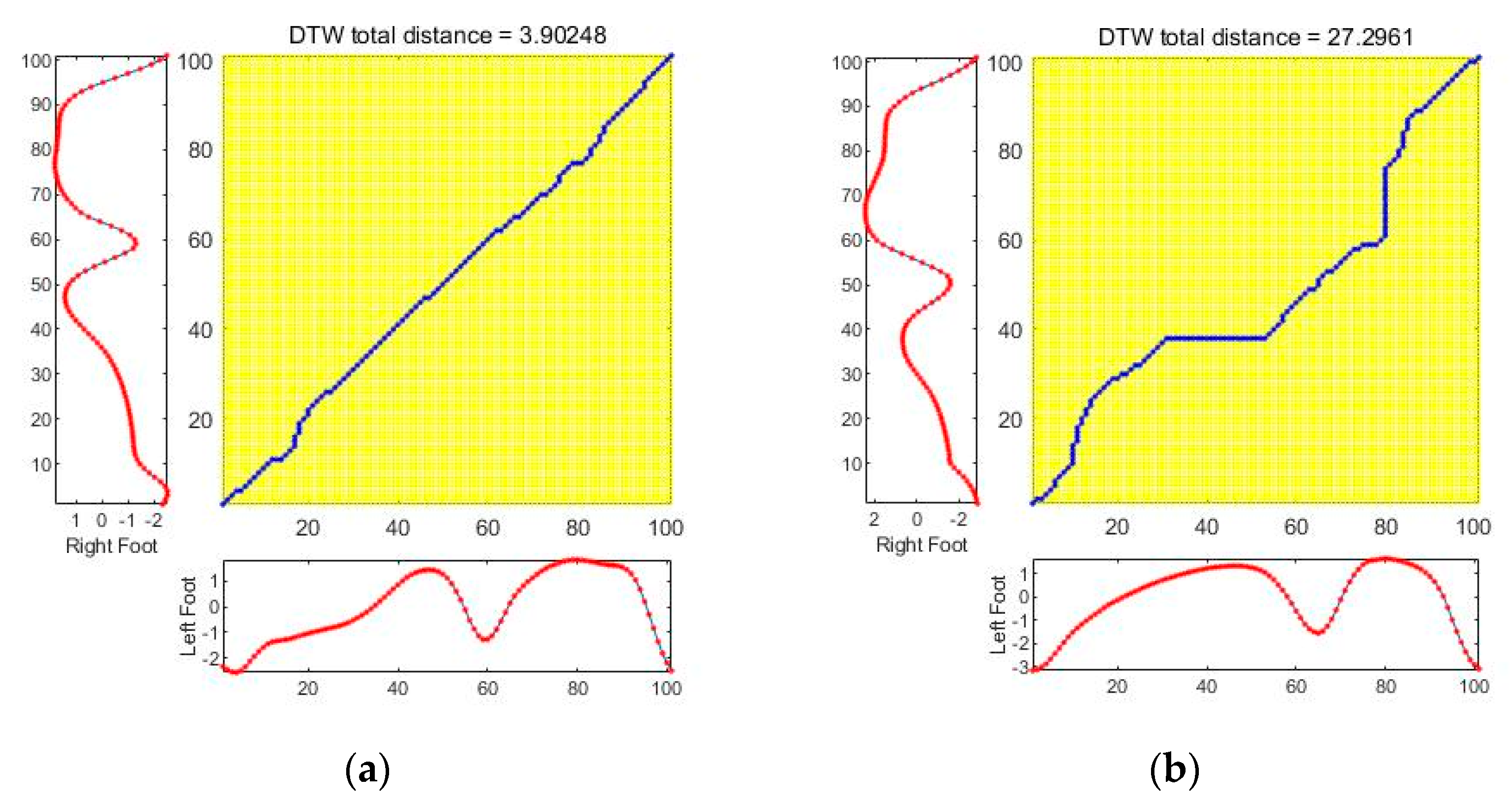
2.2.3. Dynamic Time Warping
2.3. Subjects and Experiment Protocol
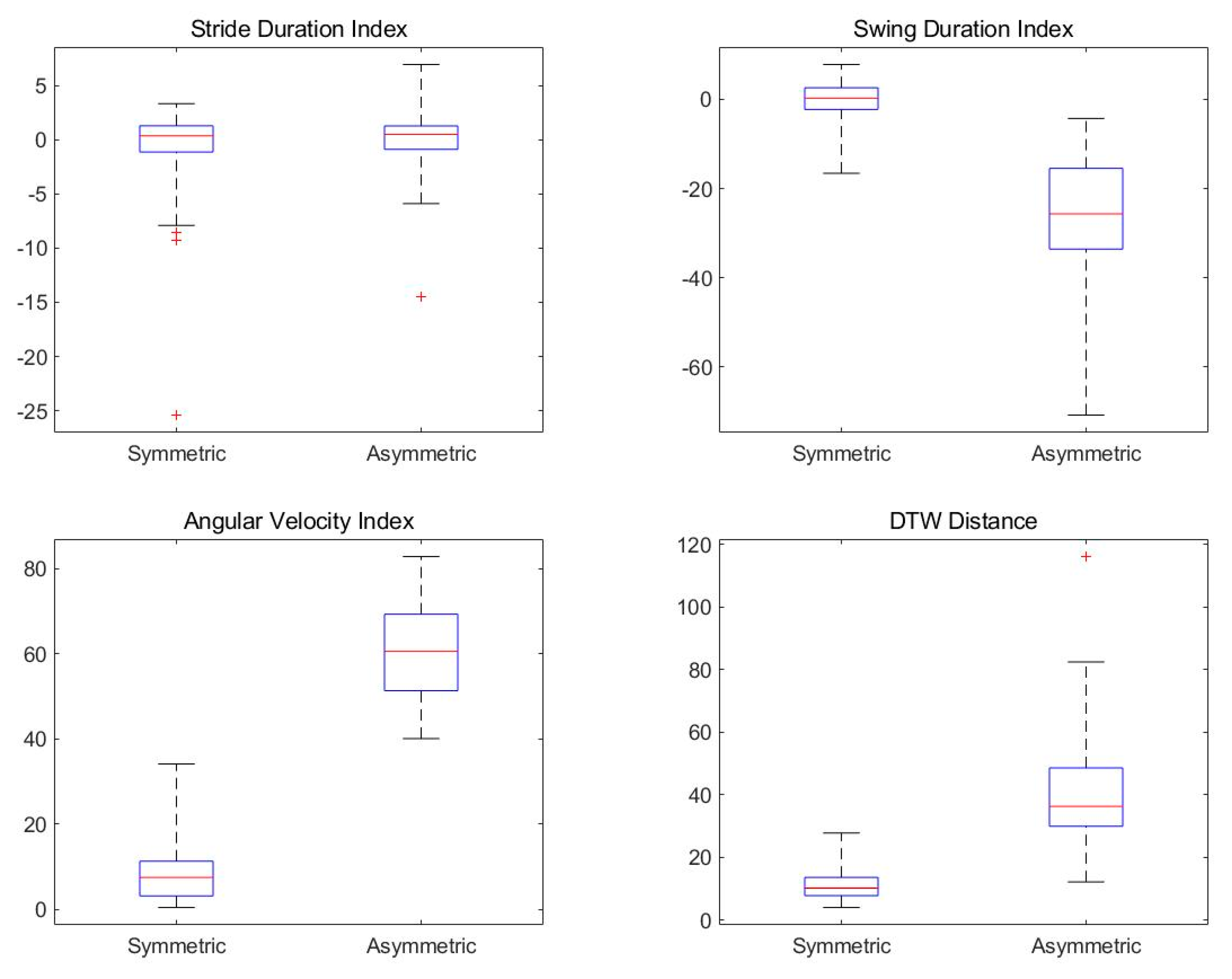
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, S.; Lach, J.; Lo, B.; Yang, G.-Z. Sensors: A Systematic Review. IEEE J. Biomed. Health Inform. 2016, 20, 1521–1537. [Google Scholar] [CrossRef]
- Giannitsi, S.; Bougiakli, M.; Bechlioulis, A.; Kotsia, A.; Michalis, L.K.; Naka, K.K. 6-minute walking test: A useful tool in the management of heart failure patients. Ther. Adv. Cardiovasc. Dis. 2019, 13, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Handžić, I.; Reed, K.B. Perception of gait patterns that deviate from normal and symmetric biped locomotion. Front. Psychol. 2015, 6, 1–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laroche, D.P.; Cook, S.B.; Mackala, K. Strength Asymmetry Increases Gait Asymmetry and Variability in Older Women. Med. Sci. Sports Exerc. 2012, 44, 2172–2181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hong, S.K.; Park, S.H.; Shin, S.R.; Lee, D.G.; Lee, S.H.; Jung, S.H.; Pyo, S.H.; Lee, K.-B.; Lee, G.C. Comparison of spatio-temporal gait parameters according to shoe types in chronic stroke survivors: A preliminary study. Phys. Ther. Rehabil. Sci. 2018, 7, 23–28. [Google Scholar] [CrossRef] [Green Version]
- Boudarham, J.; Roche, N.; Pradon, D.; Bonnyaud, C.; Bensmail, D.; Zory, R. Variations in Kinematics during Clinical Gait Analysis in Stroke Patients. PLoS ONE 2013, 8, e66421. [Google Scholar] [CrossRef]
- Bonnyaud, C.; Pradon, D.; Vuillerme, N.; Bensmail, D.; Roche, N. Spatiotemporal and Kinematic Parameters Relating to Oriented Gait and Turn Performance in Patients with Chronic Stroke. PLoS ONE 2015, 10, e0129821. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.P.; Ayachi, F.; Lavigne–Pelletier, C.; Blamoutier, M.; Rahimi, F.; Boissy, P.; Jog, M.; Duval, C. Auto detection and segmentation of physical activities during a Timed-Up-and-Go (TUG) task in healthy older adults using multiple inertial sensors. J. Neuroeng. Rehabil. 2015, 12, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Buisseret, F.; Catinus, L.; Grenard, R.; Jojczyk, L.; Fievez, D.; Barvaux, V.; Dierick, F. Timed Up and Go and Six-Minute Walking Tests with Wearable Inertial Sensor: One Step Further for the Prediction of the Risk of Fall in Elderly Nursing Home People. Sensors 2020, 20, 3207. [Google Scholar] [CrossRef]
- Da Silva, L.P.G.; Araújo, M.D.G.R.D.; Costa, A.D.S.; Pedrosa, B.C.D.S.; Da Silva, K.K.D.; Dos Santos, T.M. Inertial sensor and Timed Up and Go test in elderly women with bone demineralization: A reliability and agreement study. Rev. Bras. Ativ. Fís. Saúde 2020, 25, 1–7. [Google Scholar] [CrossRef]
- Viteckova, S.; Kutilek, P.; Svoboda, Z.; Krupicka, R.; Kauler, J.; Szabo, Z. Gait symmetry measures: A review of current and prospective methods. Biomed. Signal Process. Control 2018, 42, 89–100. [Google Scholar] [CrossRef]
- Beauchet, O.; Allali, G.; Sekhon, H.; Verghese, J.; Guilain, S.; Steinmetz, J.-P.; Kressig, R.W.; Barden, J.M.; Szturm, T.; Launay, C.P.; et al. Guidelines for Assessment of Gait and Reference Values for Spatiotemporal Gait Parameters in Older Adults: The Biomathics and Canadian Gait Consortiums Initiative. Front. Hum. Neurosci. 2017, 11, 353. [Google Scholar] [CrossRef]
- Balasubramanian, C.K.; Bowden, M.G.; Neptune, R.R.; Kautz, S. Relationship Between Step Length Asymmetry and Walking Performance in Subjects with Chronic Hemiparesis. Arch. Phys. Med. Rehabil. 2007, 88, 43–49. [Google Scholar] [CrossRef] [PubMed]
- Rumberg, F.; Bakir, M.S.; Taylor, W.R.; Haberl, H.; Sarpong, A.; Sharankou, I.; Lebek, S.; Funk, J.F. The Effects of Selective Dorsal Rhizotomy on Balance and Symmetry of Gait in Children with Cerebral Palsy. PLoS ONE 2016, 11, e0152930. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ellis, R.G.; Howard, K.C.; Kram, R. The metabolic and mechanical costs of step time asymmetry in walking. Proc. R. Soc. B Biol. Sci. 2013, 280, 20122784. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Błażkiewicz, M.; Wiszomirska, I.; Wit, A. Comparison of four methods of calculating the symmetry of spatial-temporal parameters of gait. Acta Bioeng. Biomech. 2014, 16, 29–35. [Google Scholar] [PubMed]
- Meijer, R.; Plotnik, M.; Zwaaftink, E.G.; Van Lummel, R.C.; Ainsworth, E.; Martina, J.D.; Hausdorff, J.M. Markedly impaired bilateral coordination of gait in post-stroke patients: Is this deficit distinct from asymmetry? A cohort study. J. Neuroeng. Rehabil. 2011, 8, 23. [Google Scholar] [CrossRef] [Green Version]
- Nessler, J.A.; Gutierrez, V.; Werner, J.; Punsalan, A. Side by side treadmill walking reduces gait asymmetry induced by unilateral ankle weight. Hum. Mov. Sci. 2015, 41, 32–45. [Google Scholar] [CrossRef] [PubMed]
- Staab, W.; Hottowitz, R.; Sohns, C.; Sohns, J.M.; Gilbert, F.; Menke, J.; Niklas, A.; Lotz, J. Accelerometer and Gyroscope Based Gait Analysis Using Spectral Analysis of Patients with Osteoarthritis of the Knee. J. Phys. Ther. Sci. 2014, 26, 997–1002. [Google Scholar] [CrossRef] [Green Version]
- Wall, J.C.; Turnbull, G.I. Gait asymmetries in residual hemiplegia. Arch. Phys. Med. Rehabil. 1986, 67, 550–553. [Google Scholar] [CrossRef]
- Wang, Y.; Mukaino, M.; Ohtsuka, K.; Otaka, Y.; Tanikawa, H.; Matsuda, F.; Tsuchiyama, K.; Yamada, J.; Saitoh, E. Gait characteristics of post-stroke hemiparetic patients with different walking speeds. Int. J. Rehabil. Res. 2020, 43, 69–75. [Google Scholar] [CrossRef]
- Lee, H.-S. Application of dynamic time warping algorithm for pattern similarity of gait. J. Exerc. Rehabil. 2019, 15, 526–530. [Google Scholar] [CrossRef] [Green Version]
- Anwary, A.R.; Yu, H.; Vassallo, M. An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors. Sensors 2018, 18, 676. [Google Scholar] [CrossRef] [Green Version]
- Sprager, S.; Juric, M.B. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar] [CrossRef]
- Wafai, L.; Zayegh, A.; Woulfe, J.; Aziz, S.M.; Begg, R. Identification of Foot Pathologies Based on Plantar Pressure Asymmetry. Sensors 2015, 15, 20392–20408. [Google Scholar] [CrossRef] [Green Version]
- Evans, R.; Arvind, D. Detection of Gait Phases Using Orient Specks for Mobile Clinical Gait Analysis. In Proceedings of the 2014 11th International Conference on Wearable and Implantable Body Sensor Networks, Zurich, Switzerland, 16–19 June 2014; pp. 149–154. [Google Scholar]
- González, I.; Fontecha, J.; Hervás, R.; Bravo, J. An Ambulatory System for Gait Monitoring Based on Wireless Sensorized Insoles. Sensors 2015, 15, 16589–16613. [Google Scholar] [CrossRef] [Green Version]
- Solanki, D.; Lahiri, U. Adaptive Treadmill-Assisted Virtual Reality-Based Gait Rehabil for Post-Stroke Physical Reconditioning—A Feasibility Study in Low-Resource Settings. IEEE Access 2020, 8, 88830–88843. [Google Scholar] [CrossRef]
- Manchola, M.D.S.S.; Bernal, M.J.P.P.; Munera, M.; Cifuentes, C.A. Gait Phase Detection for Lower-Limb Exoskeletons using Foot Motion Data from a Single Inertial Measurement Unit in Hemiparetic Individuals. Sensors 2019, 19, 2988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mansour, A.H.; Salh, G.Z.A.; Mohammed, K.A. Voice Recognition using Dynamic Time Warping and Mel-Frequency Cepstral Coefficients Algorithms. Int. J. Comput. Appl. 2015, 116, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Switonski, A.; Josinski, H.; Wojciechowski, K. Dynamic time warping in classification and selection of motion capture data. Multidimens. Syst. Signal Process. 2019, 30, 1437–1468. [Google Scholar] [CrossRef]
- Steinmetzer, T.; Bonninger, I.; Priwitzer, B.; Reinhardt, F.; Reckhardt, M.C.; Erk, D.; Travieso, C.M. Clustering of Human Gait with Parkinson’s Disease by Using Dynamic Time Warping. In Proceedings of the 2018 IEEE International Work Conference on Bioinspired Intelligence (IWOBI), San Carlos, Costa Rica, 18–20 July 2018; pp. 1–6. [Google Scholar]
- Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schülein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef]
- Santanna, A.; Salarian, A.; Wickstrom, N. A new measure of movement symmetry in early parkinsons disease patients using symbolic processing of inertial sensor data. IEEE Trans. Biomed. Eng. 2011, 58, 2127–2135. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pirker, W.; Katzenschlager, R. Gait disorders in adults and the elderly: A clinical guide. Wien. Klin. Wochenschr. 2017, 129, 81–95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dooley, J.M.; Gordon, K.E. Spurious neurological signs and symptoms in children. Paediatr. Child Health 2011, 16, e51–e53. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | Method | Symmetric Gait | Asymmetric Gait | p-Value |
|---|---|---|---|---|
| Subjects1 | Stride duration | −0.99 ± 4.03 | −0.56 ± 1.44 | 0.7937 |
| Swing duration | −1.05 ± 4.62 | −33.38 ± 6.71 | 0.0002 | |
| Maximum angular velocity | 7.30 ± 6.84 | 52.32 ± 7.49 | 0.0001 | |
| DTW distance (proposed) | 13.34 ± 4.66 | 33.94 ± 5.25 | 0.0002 | |
| Subjects2 | Stride duration | 0.15 ± 1.98 | 2.16 ± 2.39 | 0.0643 |
| Swing duration | 2.02 ± 4.87 | −9.44 ± 4.26 | 0.0003 | |
| Max angular velocity | 8.90 ± 9.44 | 58.30 ± 8.64 | 0.0002 | |
| DTW distance (proposed) | 11.41 ± 5.38 | 32.44 ± 11.40 | 0.0004 | |
| Subjects3 | Stride duration | 0.90 ± 1.34 | 0.30 ± 0.98 | 0.8493 |
| Swing duration | 0.04 ± 2.44 | 5.71 ± 4.52 | 0.0002 | |
| Max angular velocity | 5.71 ± 4.52 | 57.83 ± 8.82 | 0.0008 | |
| DTW distance (proposed) | 8.59 ± 2.18 | 46.72 ± 12.60 | 0.0002 | |
| Subjects4 | Stride duration | −0.11 ± 1.57 | 0.41 ± 2.24 | 0.3472 |
| Swing duration | 0.32 ± 3.68 | −17.59 ± 6.07 | 0.0002 | |
| Max angular velocity | 8.71 ± 4.35 | 61.44 ± 15.59 | 0.0002 | |
| DTW distance (proposed) | 15.15 ± 6.60 | 22.22 ± 7.49 | 0.0455 | |
| Subjects5 | Stride duration | −4.31 ± 8.28 | −3.02 ± 7.34 | 0.6745 |
| Swing duration | −3.15 ± 7.58 | −38.92 ± 17.95 | 0.0002 | |
| Max angular velocity | 14.31 ± 7.09 | 74.13 ± 8.48 | 0.0003 | |
| DTW distance (proposed) | 9.53 ± 4.53 | 72.48 ± 26.34 | 0.0002 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, Y.-K.; Baek, K.-R. Asymmetric Gait Analysis Using a DTW Algorithm with Combined Gyroscope and Pressure Sensor. Sensors 2021, 21, 3750. https://doi.org/10.3390/s21113750
Jeong Y-K, Baek K-R. Asymmetric Gait Analysis Using a DTW Algorithm with Combined Gyroscope and Pressure Sensor. Sensors. 2021; 21(11):3750. https://doi.org/10.3390/s21113750
Chicago/Turabian StyleJeong, Yeon-Keun, and Kwang-Ryul Baek. 2021. "Asymmetric Gait Analysis Using a DTW Algorithm with Combined Gyroscope and Pressure Sensor" Sensors 21, no. 11: 3750. https://doi.org/10.3390/s21113750
APA StyleJeong, Y.-K., & Baek, K.-R. (2021). Asymmetric Gait Analysis Using a DTW Algorithm with Combined Gyroscope and Pressure Sensor. Sensors, 21(11), 3750. https://doi.org/10.3390/s21113750