
Indoor Positioning System Based on Global Positioning System Signals with Down- and Up-Converters in 433 MHz ISM Band

 , , and
, , and
Abstract
:1. Introduction
2. Indoor Positioning System in 433 MHz ISM Band
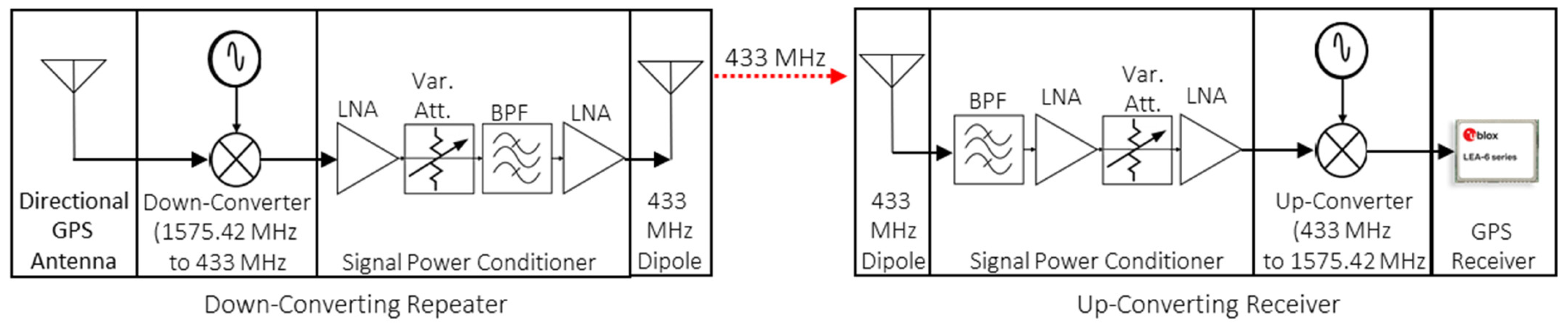
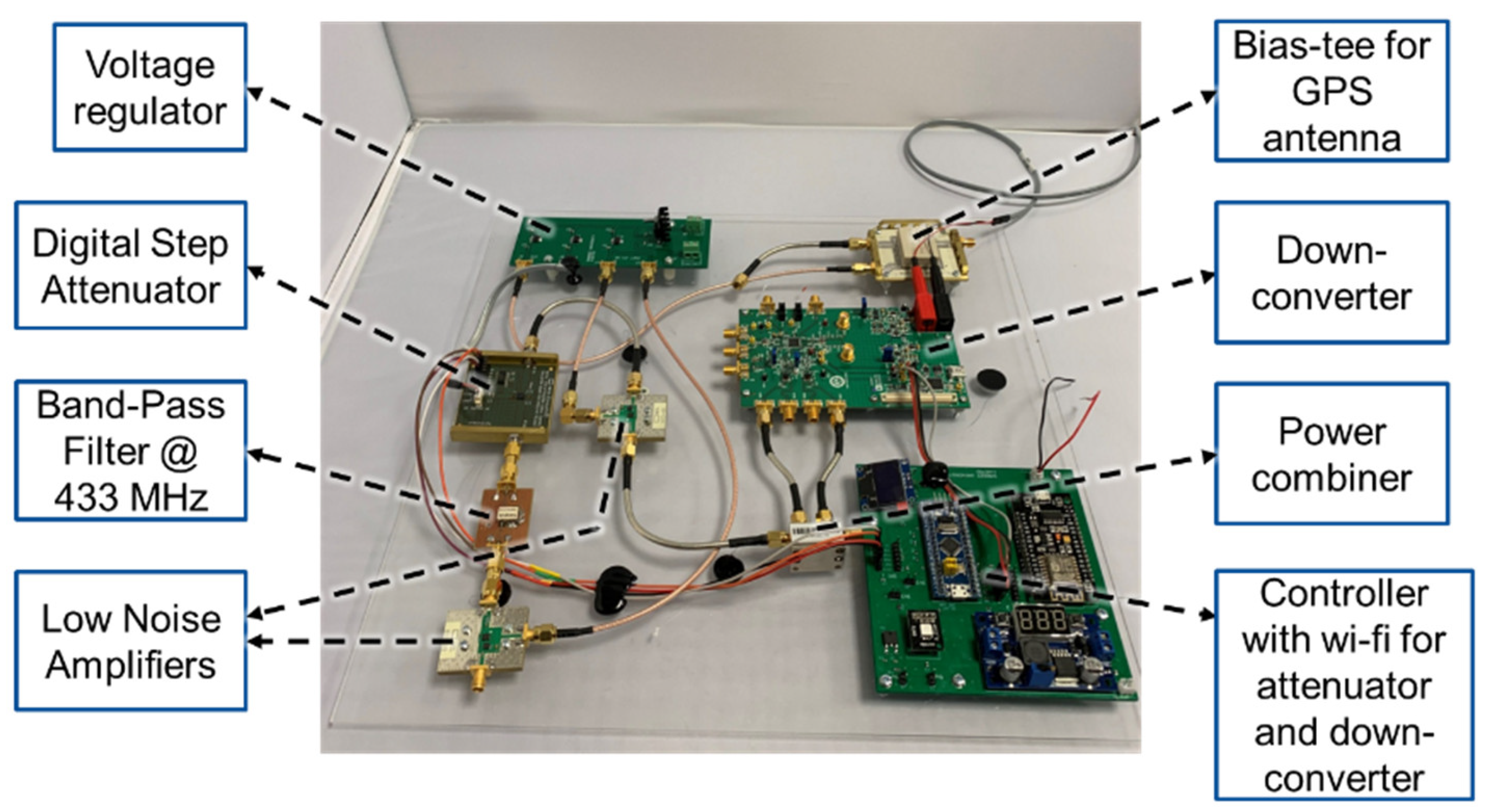
2.1. GPS Down-Converting Repeater
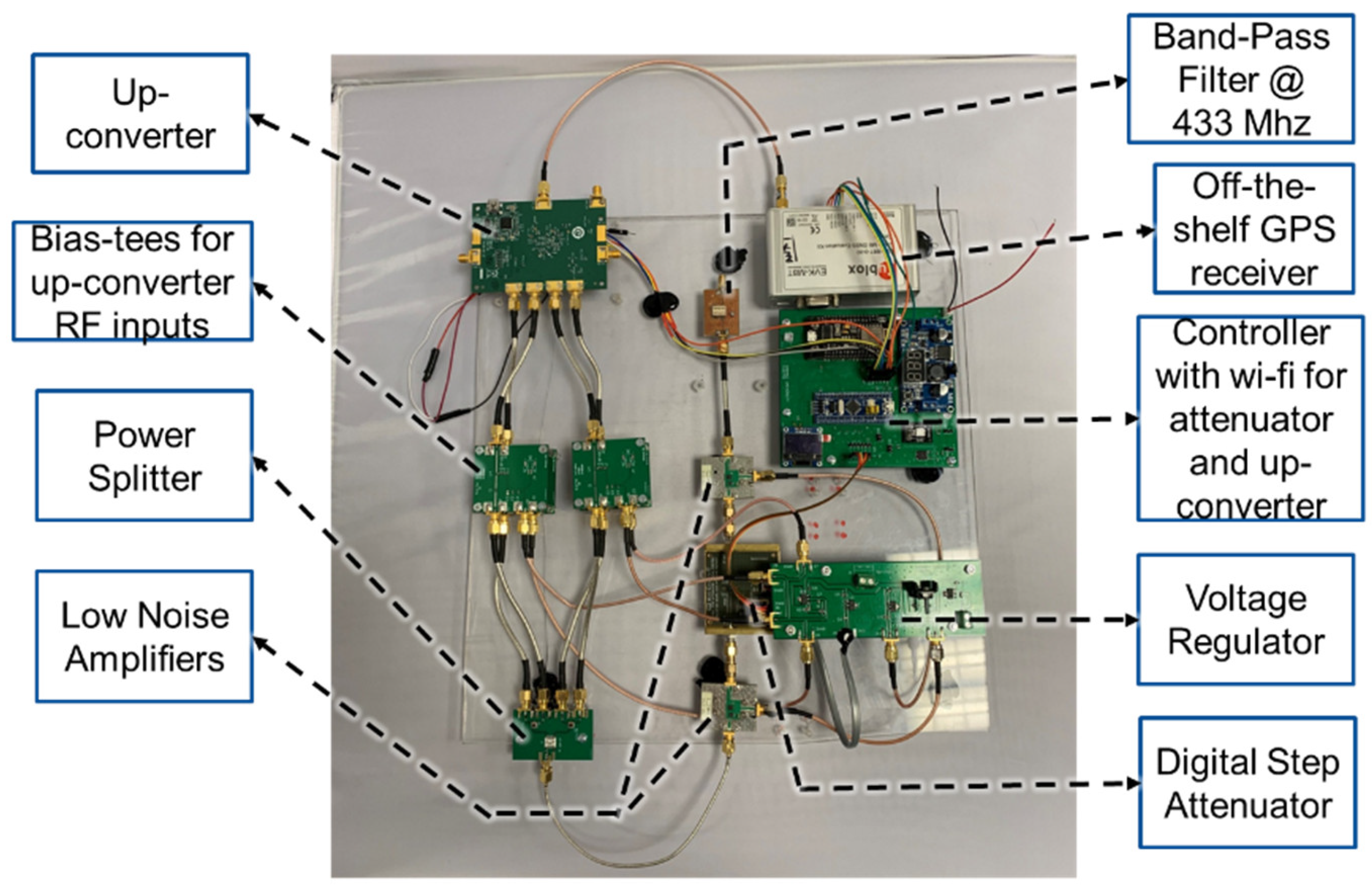
2.2. Up-Converting Receiver
2.3. Algorithm for Indoor Position Estimation
3. Experimental Setups for Indoor Positioning
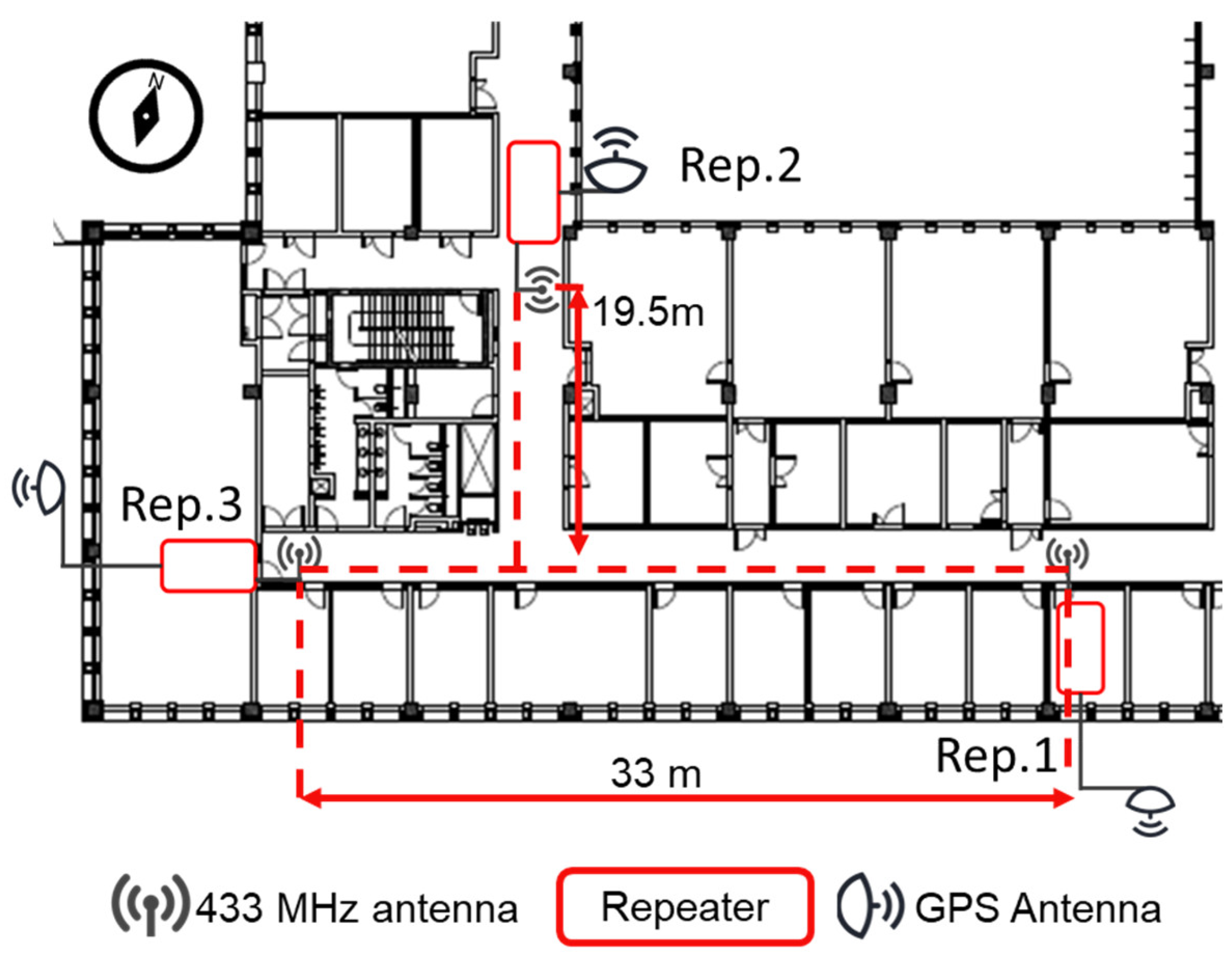
3.1. Setup for Experiment 1
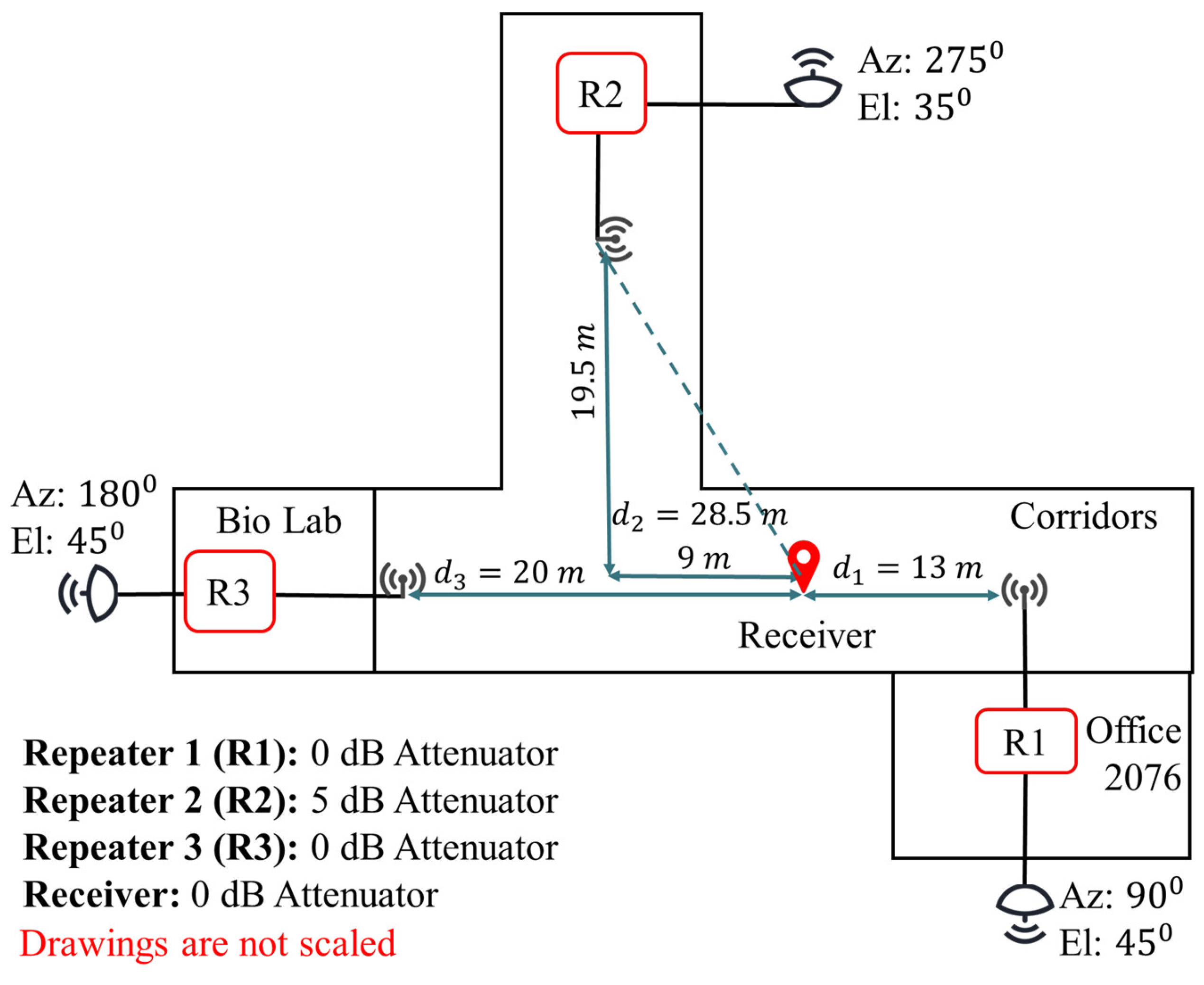
3.2. Setup for Experiment 2
4. Results and Discussion
4.1. Results of Experiment 1
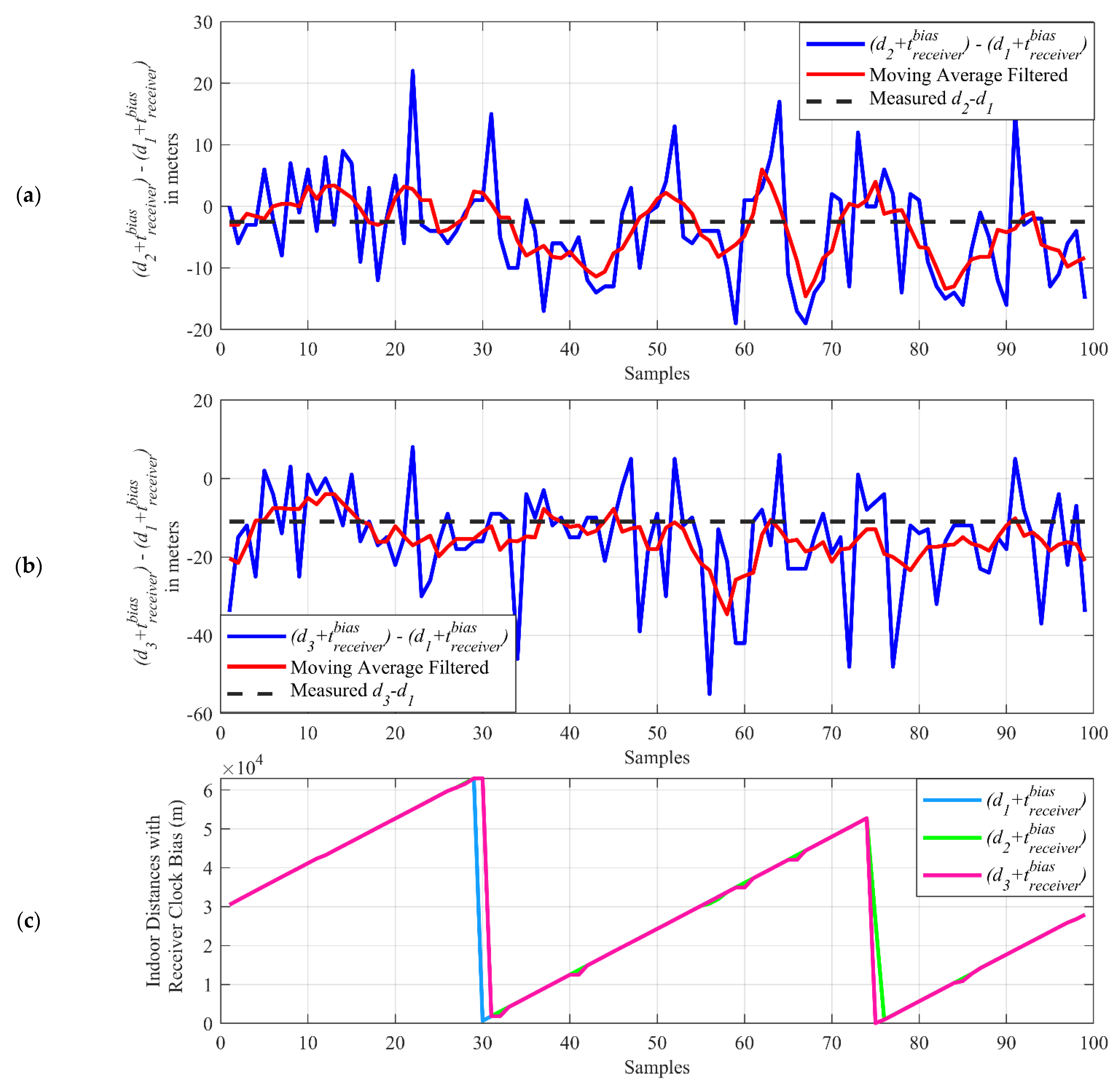
4.2. Results of Experiment 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- MarketsandMarkets. Indoor Location Market by Component (Hardware, Solutions, and Services), Deployment Mode, Organization Size, Technology, Application, Vertical (Retail, Transportation and Logistics, Entertainment), and Region—Global Forecast to 2025 (Report Code: TC 2878). May 2020. Available online: https://www.marketsandmarkets.com/Market-Reports/indoor-location-market-989.html (accessed on 20 May 2021).
- Vasisht, D.; Kumar, S.; Katabi, D. Decimeter-Level Localization with A Single Wifi Access Point. In Proceedings of the 13th USENIX Symposium on Networked Systems Design and Implementation (NSDI’16), Santa Clara, CA, USA, 16–18 March 2016; pp. 165–178. [Google Scholar]
- Cypriani, M.; Lassabe, F.; Canalda, P.; Spies, F. Open Wireless Positioning System: A Wi-Fi-Based Indoor Positioning System. In Proceedings of the 2009 IEEE 70th Vehicular Technology Conference Fall (VTC 2009-Fall), Anchorage, AK, USA, 20–23 September 2009; pp. 1–5. [Google Scholar]
- Zou, H.; Jiang, H.; Lu, X.; Xie, L. An Online Sequential Extreme Learning Machine Approach to Wifi Based Indoor Positioning. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6 March 2014; pp. 111–116. [Google Scholar]
- Ciurana, M.; Cugno, S. WLAN Indoor Positioning Based on TOA with Two Reference Points. In Proceedings of the 4th Workshop on Positioning, Navigation and Communication 2007 (WPNC’07), Hannover, Germany, 22–22 March 2007; pp. 23–28. [Google Scholar]
- Hoang, M.K.; Haeb-Umbach, R. Parameter Estimation and Classification of Censored Gaussian Data with Application to Wifi Indoor Positioning. In Proceedings of the 38th International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2013), Vancouver, BC, Canada, 26–31 May 2013; pp. 3721–3725. [Google Scholar]
- Faheem, F. Ibeacon Based Proximity and Indoor Localization System. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2016. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting with Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Madhavapeddy, A.; Tse, A. A Study of Bluetooth Propagation Using Accurate Indoor Location Mapping. In Proceedings of the UbiComp 2005: Ubiquitous Computing, Tokyo, Japan, 11–14 September 2005; pp. 105–122. [Google Scholar]
- Zafari, F.; Papapanagiotou, I.; Christidis, K. Microlocation for Internet of Things Equipped Smart Buildings. IEEE Internet Things J. 2016, 3, 96–112. [Google Scholar] [CrossRef] [Green Version]
- Castillo-Cara, M.; Lovón-Melgarejo, J.; Bravo-Rocca, G.; Orozco-Barbosa, L.; García-Varea, I. An Analysis of Multiple Criteria and Setups for Bluetooth Smartphone-Based Indoor Localization Mechanism. J. Sens. 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Aykac, M.; Ergun, E.; Aldin, N.B. Zigbee-Based Indoor Localization System with The Personal Dynamic Positioning Method and Modified Particle Filter Estimation. Analog. Integr. Circuits Signal Process. 2017, 92, 263–279. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor Location Sensing Using Active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Kuo, Y.-S.; Pannuto, P.; Hsiao, K.-J.; Dutta, P. Luxapose: Indoor Positioning with Mobile Phones and Visible Light. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 447–458. [Google Scholar]
- Liu, K.; Liu, X.; Li, X. Guoguo: Enabling Fine-Grained Smartphone Localization Via Acoustic Anchors. IEEE Trans. Mob. Comput. 2016, 15, 1144–1156. [Google Scholar] [CrossRef]
- Huang, W.; Xiong, Y.; Li, X.Y.; Lin, H.; Mao, X.; Yang, P.; Liu, Y.; Wang, X. Swadloon: Direction Finding and Indoor Localization Using Acoustic Signal by Shaking Smartphones. IEEE Trans. Mob. Comput. 2015, 14, 2145–2157. [Google Scholar] [CrossRef]
- Priyantha, N.B. The Cricket Indoor Location System; Massachusetts Institute of Technology: Cambridge, MA, USA, 2005. [Google Scholar]
- Hazas, M.; Hopper, A. Broadband Ultrasonic Location Systems for Improved Indoor Positioning. IEEE Trans. Mob. Comput. 2006, 5, 536–547. [Google Scholar] [CrossRef] [Green Version]
- Peterson, B.; Bruckner, D.; Heye, S. Measuring GPS Signals Indoors. In Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997), Kansas City, MO, USA, 16–19 September 1997; pp. 615–624. [Google Scholar]
- Moeglein, M.; Krasner, N. An Introduction to SnapTrack Server-Aided GPS Technology. In Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1998), Nashville, TN, USA, 15–18 September 1998; pp. 333–342. [Google Scholar]
- Garin, L.J.; Chansarkar, M.; Miocinovic, S.; Norman, C.; Hilgenberg, D. Wireless Assisted GPS-SiRF Architecture and Field Test Results. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999; pp. 489–498. [Google Scholar]
- Andrianarison, M. New Methods and Architectures for High Sensitivity Hybrid GNSS Receivers in Challenging Environments. Ph.D. Thesis, University of Toulouse, Toulouse, France, 2018. [Google Scholar]
- Monnerat, M.; Couty, R.; Vincent, N.; Huez, O.; Chatre, E. The Assisted GNSS, Technology and Applications. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004. [Google Scholar]
- Klein, D.; Parkinson, B.W. The Use of Pseudo-Satellites for Improving GPS Performance. J. Institude Navig. 1984, 31, 303–315. [Google Scholar] [CrossRef]
- Rapinski, J.; Cellmer, S.; Rzepecka, Z. Modified GPS/Pseudolite Navigation Message. J. Navig. 2012, 65, 711–716. [Google Scholar] [CrossRef] [Green Version]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental Results of Locata: A High Accuracy Indoor Positioning System. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010. [Google Scholar] [CrossRef]
- Kee, C.; Jun, H.; Yun, D. Indoor Navigation System Using Asynchronous Pseudolites. J. Navig. 2003, 56, 443–455. [Google Scholar] [CrossRef]
- Xingli, G.; Baoguo, Y.; Xianpeng, W.; Yongqin, Y.; Ruicai, J.; Heng, Z.; Chuanzhen, S.; Lu, H.; Boyuan, W. A New Array Pseudolites Technology for High Precision Indoor Positioning. IEEE Access 2019, 7, 153269–153277. [Google Scholar] [CrossRef]
- Petrovski, I.; Okano, K.; Kawaguchi, S.; Torimoto, H.; Suzuki, K.; Toda, M.; Akita, J. Indoor Code and Carrier Phase Positioning with Pseudolites and Multiple GPS Repeaters. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 1135–1143. [Google Scholar]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A New Indoor Positioning System Architecture Using Gps Signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Yang, J.; Chen, J.; Tang, Y. Indoor and Outdoor Positioning System Based on Navigation Signal Simulator and Pseudolites. Adv. Space Res. 2018, 62, 2509–2517. [Google Scholar] [CrossRef]
- Ozsoy, K.; Bozkurt, A.; Tekin, I. Indoor Positioning Based on Global Positioning System Signals. Microw. Opt. Technol. Lett. 2013, 55, 1091–1097. [Google Scholar] [CrossRef] [Green Version]
- Fluerasu, A.; Jardak, N.; Vervisch-picois, A.; Samama, N. GNSS Repeater Based Approach for Indoor Positioning: Current Status. In Proceedings of the European Navigational Conference ENC-GNSS 2009, Naples, Italy, 3–6 May 2009. [Google Scholar]
- Vervisch-Picois, A.; Samama, N. First Experimental Performances of The Repealite Based Indoor Positioning System. In Proceedings of the 2012 International Symposium on Wireless Communication Systems, Paris, France, 28–31 August 2012; pp. 636–640. [Google Scholar]
- Selmi, I.; Samama, N.; Vervisch-Picois, A. A New Approach for Decimeter Accurate GNSS Indoor Positioning Using Carrier Phase Measurements. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013. [Google Scholar]
- Morosi, S.; Martinelli, A.; DelźRe, E. Peer-to-peer cooperation for GPS positioning. Int. J. Satell. Commun. Netw. 2017, 35, 323–341. [Google Scholar] [CrossRef]
- Mautz, R. Overview of Current Indoor Positioning Systems. Geod. Cartogr. 2009, 35, 18–22. [Google Scholar] [CrossRef]
- Electronic Communications Committee (ECC) within the European Conference of Postal and Telecommunications Administration (CEPT). Technical and Operational Provisions Required for the Use of GNSS Repeaters; ECC REPORT 129; ECC: Dublin, Ireland, 2009; Available online: https://docdb.cept.org/download/f9323e3e-0577/ECCREP129.PDF (accessed on 20 May 2021).
- Electronic Communications Committee (ECC) within the European Conference of Postal and Telecommunications Administration (CEPT). Regulatory Framework for Global Navigation Satellite System (GNSS) Repeaters. ECC REPORT 145. Available online: https://docdb.cept.org/download/582 (accessed on 20 May 2021).
- European Telecommunications Standard Institute (ETSI). Electromagnetic Compatibility and Radio Spectrum Matters (ERM); Short Range Devices; Global Navigation Satellite Systems (GNSS) Repeaters; Harmonized EN Covering the Essential Requirements of Article 3.2 of the R&TTE Directive (ETSI EN 302 645). Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/302645/01.01.01_60/en_302645v010101p.pdf (accessed on 20 May 2021).
- U.S. Department of Commerce National Telecommunications and Information Administration (NTIA). Manual of Regulations and Procedures for Federal Radio Frequency Management; Redbook. Available online: https://www.ntia.doc.gov/page/2011/manual-regulations-and-procedures-federal-radio-frequency-management-redbook (accessed on 20 May 2021).
- Tekin, I.; Bozkurt, A.; Ozsoy, K. Indoor Positioning System Based on GPS Signals and Pseudolites with Outdoor Directional Antennas. U.S. Patent US20120286992A1, 15 November 2012. [Google Scholar]
- Orhan, O.; Tekin, I.; Bozkurt, A. Down-converter for GPS applications. In Proceedings of the 12th Mediterranean Microwave Symposium, Istanbul, Turkey, 3–4 September 2012. [Google Scholar]
- Orhan, O. An Indoor Positioning System Based on Global Positioning System. Master’s Thesis, Sabanci University, Istanbul, Turkey, 2013. [Google Scholar]
- Uzun, A.; Ghani, F.A.; Yenigun, H.; Tekin, I. A Novel GNSS Repeater Architecture for Indoor Positioning Systems in ISM Band. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, Montreal, QC, Canada, 5–10 July 2020; pp. 1631–1632. [Google Scholar]
- Uzun, A. A Novel Indoor Positioning System Based on GPS Repeaters in 433 MHZ ISM Band. Master’s Thesis, Sabanci University, Istanbul, Turkey, 2020. [Google Scholar]
- Tekin, I.; Yenigun, H.; Uzun, A.; Ghani, F.A. A GNSS Repeater Architecture and Location Finding Method for Indoor Positioning Systems Using Lower Frequencies than GNSS Signals. No. PCT/TR2020/050202, 13 March 2020. [Google Scholar]
- Constell, Inc. Constellation Toolbox User’s Guide, Version 7.00; Available online: https://docplayer.net/64176453-Constellation-toolbox.html (accessed on 20 May 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Blocks | Components | Block Properties |
|---|---|---|
| Directional GPS Antenna | Tango 20 off-the-shelf active GPS antenna with conic reflector | 34.45 dBi gain 60 degree 3 dB beam width |
| Directional GPS Antenna | TB-JEBT-4R2GW + bias tee | Provides DC to GPS antenna and transmits RF to down converter |
| Down-Converter | ADRF6820 quadrature demodulator, | 8.7 dB block loss Programmable over SPI from controller block |
| Down-Converter | ZX10Q-2-5-S 90 degree power combiner | Combines down-converter I/Q outputs |
| Signal Power Conditioner | LHA-13LN + low noise amplifier | 22.43 dB gain 0.9 dB noise figure |
| Signal Power Conditioner | DAT-31R5A-SP + digital step attenuator (variable attenuator) | 0 to 31.5 dB adjustable attenuation by 0.5 dB step size and can be adjusted from controller |
| Signal Power Conditioner | DBP.433.T.A.30 band pass filter at 433 MHz | 1.7 dB insertion loss at 433 MHz, 19 MHz 3 dB bandwidth |
| Signal Power Conditioner | LHA-13LN + as the second low noise amplifier | 22.43 dB gain 0.9 dB noise figure |
| 433 MHz Dipole | 433 MHz dipole on FR4 | 2.1 dBi gain 80 degree 3 dB beam width on both sides |
| Supporting Blocks | Voltage Regulator | Provides DC to system components and blocks |
| Supporting Blocks | Controller with Wi-Fi for programming attenuator and down-converter | Wi-Fi connection to remote PC, SPI connection to ADRF6820, and attenuator |
| Blocks | Components | Block Properties |
|---|---|---|
| 433 MHz Dipole | 433 MHz dipole on FR4 | 2.1 dBi gain, 80 degree 3 dB beam width on both sides |
| Signal Power Conditioner | DBP.433.T.A.30 band pass filter at 433 MHz | 1.7 dB insertion loss at 433 MHz, 19 MHz 3 dB bandwidth |
| Signal Power Conditioner | LHA-13LN + low noise amplifier | 22.43 dB gain 0.9 dB noise figure |
| Signal Power Conditioner | DAT-31R5A-SP + digital step attenuator (variable attenuator) | 0 to 31.5 dB adjustable attenuation by 0.5 dB step size and can be adjusted from controller |
| Signal Power Conditioner | LHA-13LN + as the second low noise amplifier | 22.43 dB gain 0.9 dB noise figure |
| Up-Converter | I/Q power divider, bias tees | Provides I/Q inputs and required DC levels to ADRF6720-27 |
| Up-Converter | ADRF6720-27 quadrature modulator | 1.2 dB block loss Programmable over SPI from controller block |
| Off-the-shelf GPS Receiver | LEA-6T chipset | |
| Supporting Blocks | Voltage Regulator | Provides DC to system components and blocks |
| Supporting Blocks | Controller with Wi-Fi for programming attenuator and down-converter | Wi-Fi connection to remote PC, SPI connection to ADRF6820, and attenuator |
| Repeater Number (Ri) | Position (Latitude, Longitude) | |
|---|---|---|
| R1 | 48.5 ns | 40.89072, 29.37955 |
| R2 | 103 ns * | 40.89048, 29.37941 |
| R3 | 86 ns | 40.89044, 29.37966 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uzun, A.; Ghani, F.A.; Ahmadi Najafabadi, A.M.; Yenigün, H.; Tekin, İ. Indoor Positioning System Based on Global Positioning System Signals with Down- and Up-Converters in 433 MHz ISM Band. Sensors 2021, 21, 4338. https://doi.org/10.3390/s21134338
Uzun A, Ghani FA, Ahmadi Najafabadi AM, Yenigün H, Tekin İ. Indoor Positioning System Based on Global Positioning System Signals with Down- and Up-Converters in 433 MHz ISM Band. Sensors. 2021; 21(13):4338. https://doi.org/10.3390/s21134338
Chicago/Turabian StyleUzun, Abdulkadir, Firas Abdul Ghani, Amir Mohsen Ahmadi Najafabadi, Hüsnü Yenigün, and İbrahim Tekin. 2021. "Indoor Positioning System Based on Global Positioning System Signals with Down- and Up-Converters in 433 MHz ISM Band" Sensors 21, no. 13: 4338. https://doi.org/10.3390/s21134338