
Efficient FPGA Implementation of a Dual-Frequency GNSS Receiver with Robust Inter-Frequency Aiding



Abstract
:1. Introduction
2. Synchronization of Multi-Band GNSS
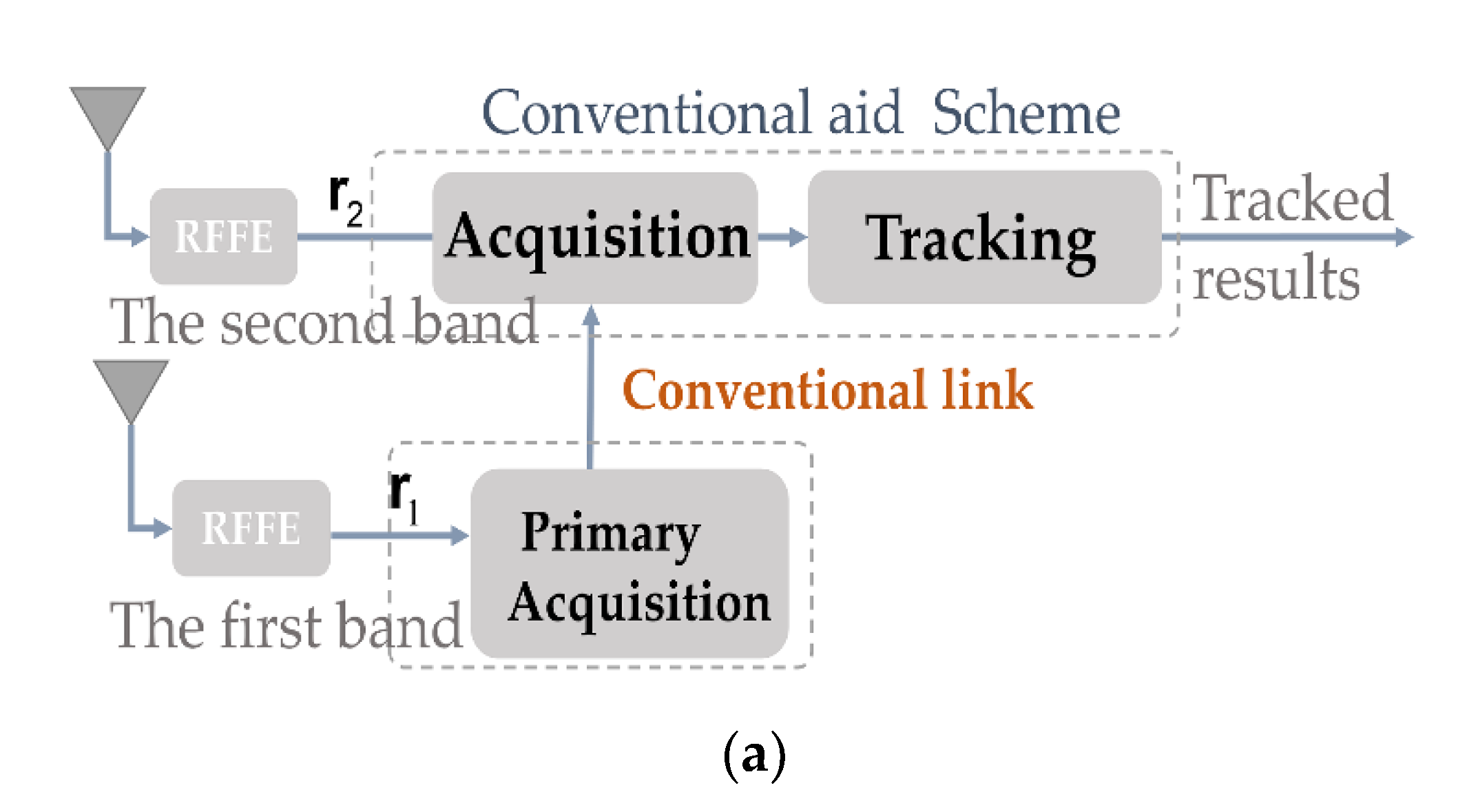
2.1. Conventional Aid Acquisition Approaches
- The primary acquisition scheme is time-consuming, its assist rate is lower than the primary tracking scheme, which updates the auxiliary information each millisecond.
- If an outlier exists in the auxiliary information, a performance degradation occurs.
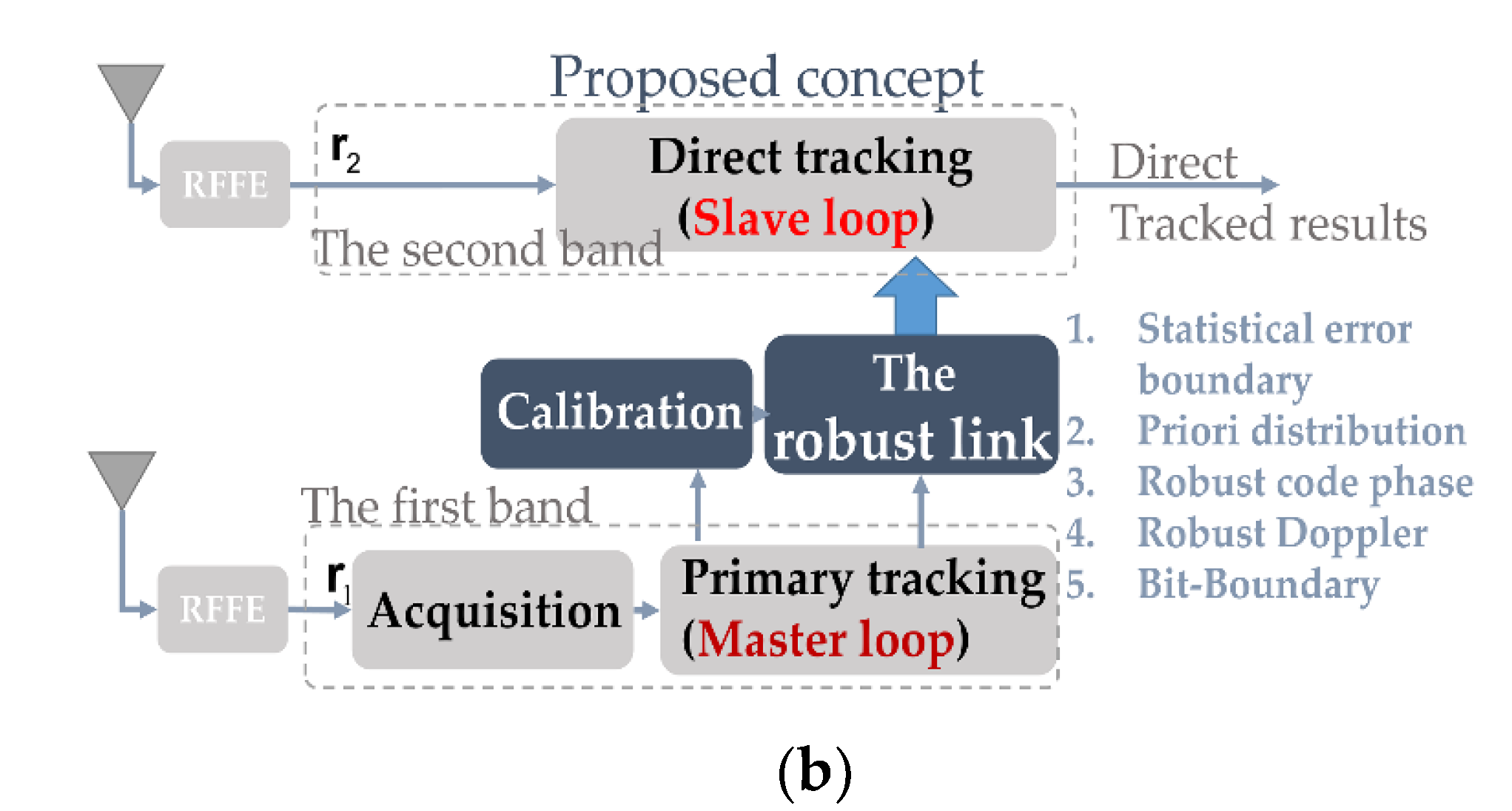
2.2. The Concept of the Proposed Robust Inner Frequency Aid
2.2.1. Limitation of Robustness
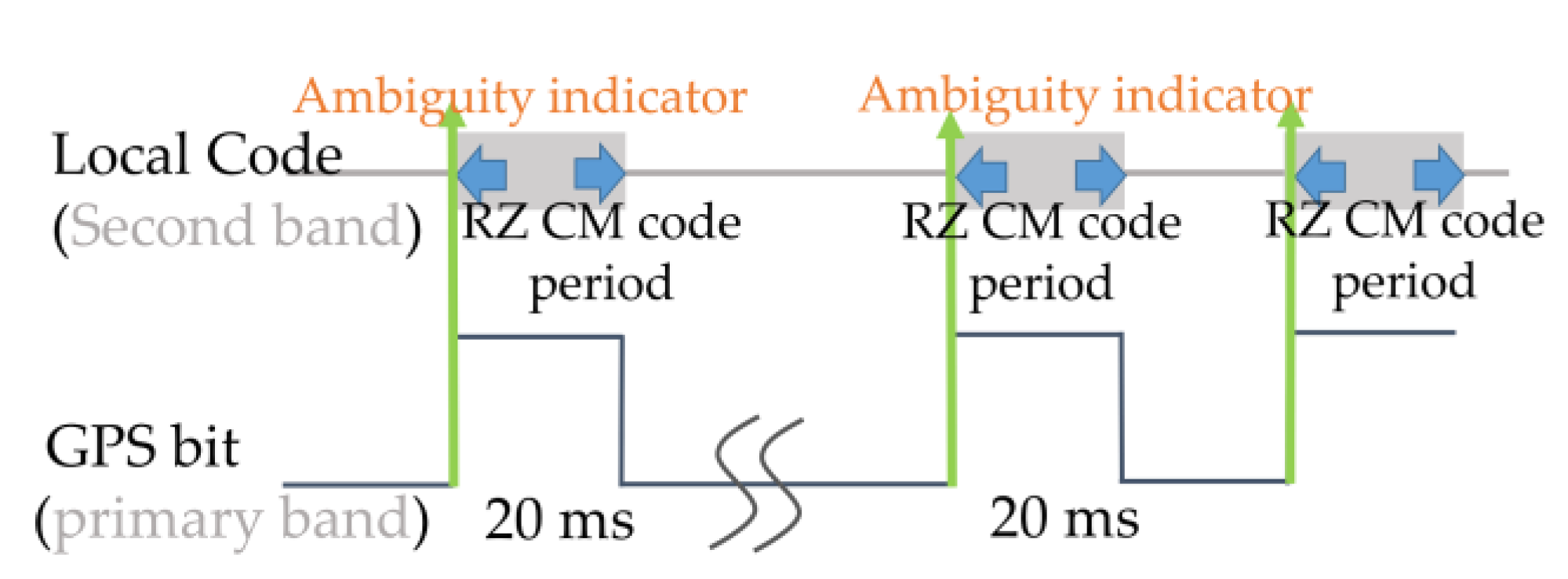
2.2.2. Limitation of Different Code Periods from Two Bands and Corresponding Process
3. Proposed Aided Tracking and Robust Inner Aiding Scheme
- The tracking results from the primary channel are used to render the upper-bound of the error-assisted data. The uncertain regions can be propagated from the locked tracker in the second band, as described in Section 3.2.
- The noise statistics of the primary channel are estimated and used to form a robust least squares (RLS) that guarantees the robustness of the relationship. Specifically, this RLS considers a modified dual-frequency GNSS model.
- The bit-boundary is tracked by the primary loop. Therefore, the code phases in the L2 and L5 bands can thereby be assigned for a fast decision.
3.1. Robust Link between Two GNSS Bands
3.1.1. The Extended Model with Structural Uncertainty
3.1.2. Robust Estimation
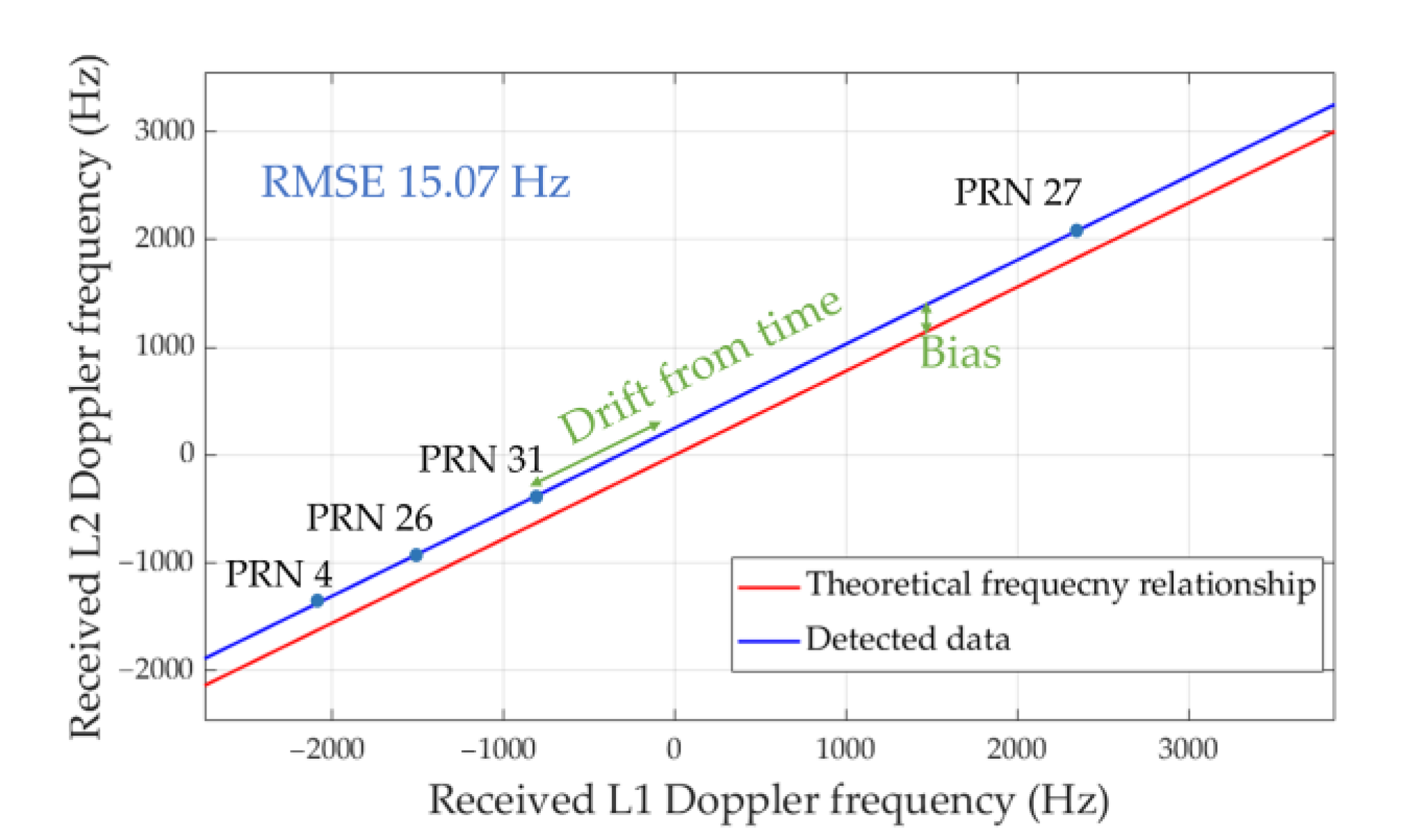
3.1.3. Bias Calibration
- A real-time receiver takes a huge amount of execution time to perform such precision zero-padding long DFT (30 ms) to obtain one , thus, a PLL initialization of the slave loop bears too huge a drift frequency range given mobility of the satellites.
- In contrast, the robust link can take using the EIV model, which considers the jitter ratio, to rapidly estimate all channel parameters of all PRNs with high assist rate (1 aid per ms), accuracy (20 Hz), and robustness, better initializing the slave loop.
3.2. Criterion for Confirming the Direct Aid Tracking by a Boundary Analysis
4. Efficient FPGA Implementation of a Dual-Frequency Receiver with the Robust Aid
4.1. Implementation of GNSS FPGA
4.1.1. Basic FPGA Architecture and On-Chip Hardware Units
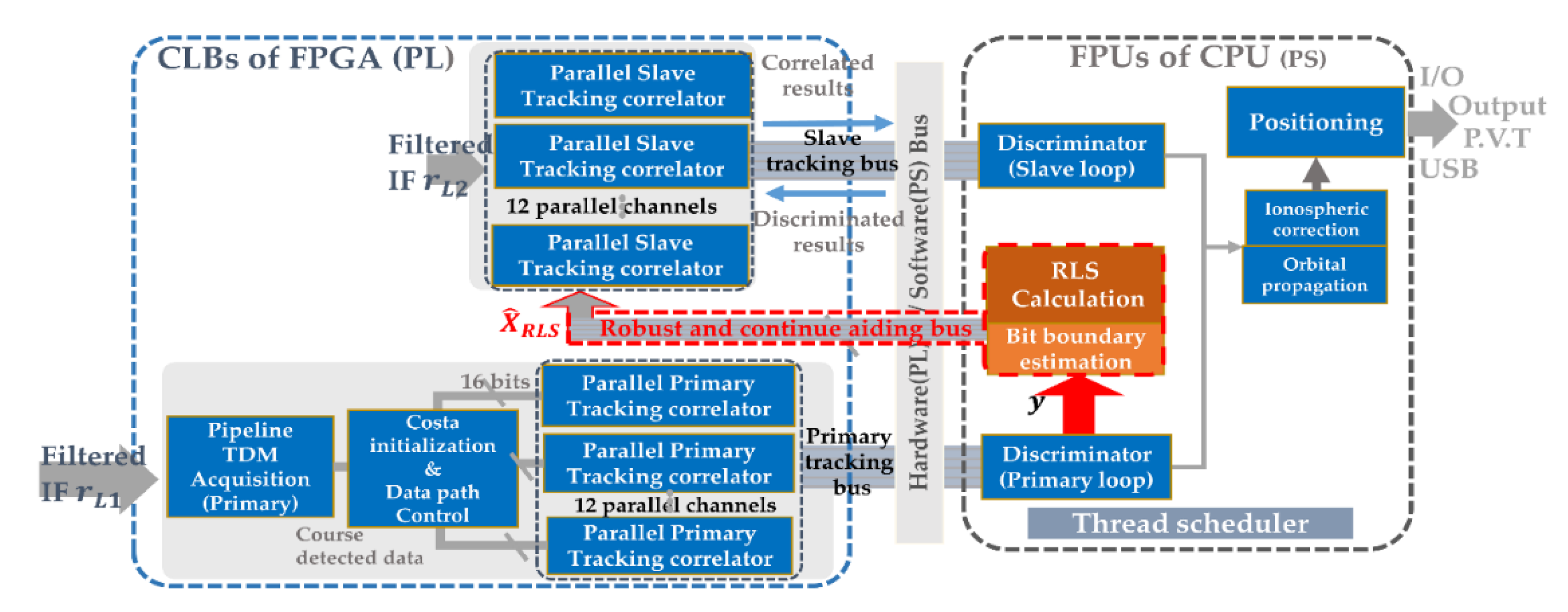
4.1.2. On-Chip Implemented Blocks and Operation Process of the GNSS FPGA
4.2. Efficient FPGA Implementation Strategies for the Robust Inner Aid
4.2.1. Trade-Off Strategy against Speed, Power, and Resources of the GNSS FPGA Implementation
4.2.2. Efficient Tasks Partitioning Scheme for the Heterogeneous Core of the GNSS FPGA
4.2.3. Efficient Combination of the Slave and Master Loops for Inner-Frequency Aid
4.3. Computational Load Analysis of the Aiding Schemes on the FPGA
5. Experiments and Results
5.1. Setup for Experiments and Verifications
5.2. Evaluate the Time Spent on Synchronization by the FPGA
Analysis of the Running Time ( and )
5.3. Analysis of the Bit-Boundary Alignment Strategy
5.4. Performance of the Robust and Adaptive Link
5.5. Resource Usage of the FPGA Implementation
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Yang, R.; Xu, D.; Morton, Y. Generalized Multifrequency GPS Carrier Tracking Architecture: Design and Performance Analysis. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2548–2563. [Google Scholar] [CrossRef]
- Tian, Y.; Sui, L.; Xiao, G.; Zhao, D. Analysis of Galileo/BDS/GPS Signals and RTK Performance. GPS Solut. 2019, 23, 37. [Google Scholar] [CrossRef]
- Vani, B.C.; Forte, B.; Monico, J.F.G. A Novel Approach to Improve GNSS Precise Point Positioning During Strong Ionospheric Scintillation: Theory and Demonstration. IEEE Trans. Veh. Technol. 2019, 68, 4391–4403. [Google Scholar] [CrossRef]
- Ta, T.H.; Pini, M.; Presti, L.L. Combined GPS L1C/A and L2C signal acquisition architectures leveraging differential combination. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3212–3229. [Google Scholar] [CrossRef]
- Ta, T.H.; Qaisar, S.U.; Dempster, A.G.; Dovis, F. Partial Differential Postcorrelation Processing for GPS L2C Signal Acquisition. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1287–1305. [Google Scholar] [CrossRef]
- Gernot, C.; O’Keefe, K.; Lachapelle, G. Assessing three new GPS combined L1/L2C acquisition methods. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2239–2247. [Google Scholar] [CrossRef]
- Lim, D.; Moon, S.; Park, C.; Lee, S. L1/L2CS GPS receiver implementation with fast acquisition scheme. In Proceedings of the IEEE/ION PLANS, San Diego, CA, USA, 25–27 April 2006; pp. 840–844. [Google Scholar]
- Yan, S. An Efficient Acquisition Strategy for Commercial Beidou-3 Dual-frequency Receivers. In Proceedings of the IEEE 5th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 23–25 October 2020; pp. 833–837. [Google Scholar] [CrossRef]
- Boche, H.; Schaefer, R.F.; Poor, H.V. Robust Transmission Over Channels with Channel Uncertainty: An Algorithmic Perspective. In Proceedings of the Conference on Acoustics, Speech and Signal. Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 5230–5234. [Google Scholar]
- Shi, J.; Li, L.; Wang, X.; Liu, C. Robust Output Feedback Controller with High-gain Observer for Automatic Clutch. Mech. Syst. Signal. Process. 2019, 132, 806–822. [Google Scholar] [CrossRef]
- Chen, Y.-J.; Chou, H.-G.; Wang, W.-J.; Tsai, S.-H.; Tanaka, K.; Wang, H.O. A Polynomial-fuzzy-model-based Synchronization Methodology for the Multi-scroll Chen Chaotic Secure Communication System. Eng. Appl. Artif. Intell. 2020, 81, 103251. [Google Scholar] [CrossRef]
- Rao, A.S. The total least squares problem. Comput. Stat. 2005, 9, 377–408. [Google Scholar]
- Eldar, Y.; Ben-Tal, A.; Nemirovski, A. Robust mean-squared error estimation in the presence of model uncertainties. IEEE Trans. Signal. Process. 2005, 53, 168–181. [Google Scholar] [CrossRef]
- Mei, Z.; Chenghui, Z.; Huanshui, Z.; Peng, C.; Yanchun, D. Robust Least Square Method and Its Application to Parameter Estimation. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics (IEEE ICAL), Jinan, China, 18–21 August 2007; pp. 1483–1486. [Google Scholar]
- Benvenuto, F.; Jin, B. A parameter choice rule for Tikhonov regularization based on predictive risk. Inverse Probl. 2020, 36, 65004. [Google Scholar] [CrossRef] [Green Version]
- Eldar, Y.C.; Ben-Tal, A.; Nemirovski, A. Linear minimax regret estimation of deterministic parameters with bounded data uncertainties. IEEE Trans. Signal. Process. 2004, 52, 2177–2188. [Google Scholar] [CrossRef]
- Crockett, L.H.; Elliot, R.; Enderwitz, M.; Stewart, R. The Zynq Book: Embedded Processing with the Arm Cortex-A9 on the Xilinx Zynq-7000 All Programmable SoC; Strathclyde Academic Media: Glasgow, UK, 2014. [Google Scholar]
- Foucras, M.; Leclère, J.; Botteron, C.; Julien, O.; Macabiau, C.; Farine, P.A.; Ekambi, B. Study on the cross-correlation of GNSS signals and typical approximations. GPS Solut. 2017, 21, 293–306. [Google Scholar] [CrossRef]
- Chang-Moon, L.; Kwan-Dong, P.; Hyun, H.J.; Uk, L.S. Generation of Klobuchar coefficients for ionospheric error simulation. J. Astron. Space Sci. 2010, 27, 117–122. [Google Scholar]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 23, 325–331. [Google Scholar] [CrossRef]
- Mallika, I.L.; Ratnam, D.V.; Raman, S.; Sivavaraprasad, G. A new ionospheric model for single frequency GNSS user applications using Klobuchar model driven by auto regressive moving average (SAKARMA) method over Indian region. IEEE Access 2020, 8, 54535–54553. [Google Scholar] [CrossRef]
- Guo, N.; Kou, Y.; Zhao, Y.; Yu, Z.; Chen, Y. An all-pass filter for compensation of ionospheric dispersion effects on wideband GNSS signals. GPS Solut. 2014, 18, 625–637. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Guo, J.; Geng, T.; Zhao, Q.; Jiang, K.; Xie, X.; Lv, Y. Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar. Remote. Sen. 2020, 12, 1215. [Google Scholar] [CrossRef] [Green Version]
- Gorodnitsky, I.F.; Rao, B.D. Analysis of error produced by truncated SVD and Tikhonov regularization methods. In Proceedings of the Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 31 October–2 November 1994; pp. 25–29. [Google Scholar]
- Qian, A.; Li, Y. Optimal error bound and generalized Tikhonov regularization for identifying an unknown source in the heat equation. J. Math. Chem. 2011, 49, 765–775. [Google Scholar] [CrossRef]
- Fenu, C.; Reichel, L.; Rodriguez, G.; Sadok, H. GCV for Tikhonov regularization by partial SVD. BIT Numer. Math. 2017, 57, 1019–1039. [Google Scholar] [CrossRef]
- Christensen, R. Plane Answers to Complex. In Questions-General Gauss–Markov Models; Springer: New York, NY, USA, 2020. [Google Scholar]
- Nguyen, N.H.; Khan, S.A.; Kim, C.-H.; Kim, J.-M. A high-performance, resource-efficient, reconfigurable parallel-pipelined FFT processor for FPGA platforms. Microprocess. Microsyst. 2018, 60, 96–106. [Google Scholar] [CrossRef]
- Halim, Z.A.; Babu, B.S.; Mustaffa, M. Hardware Software Partitioning Using Four Levels Hybrid Algorithm Technique. In Proceedings of the IEEE 10th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 18–19 April 2020; pp. 42–47. [Google Scholar]
- Proakis, J.; Salehi, M. Digital Communications; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Mao, W.L.; Tsao, H.W.; Chang, F.R. Intelligent GPS receiver for robust carrier phase tracking in kinematic environments. IET Radar. Sonar. Navig. 2004, 151, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Xia, Y.; Wang, L.; Yang, M. A fast algorithm for globally solving Tikhonov regularized total least squares problem. J. Glob. Optim. 2019, 73, 311–330. [Google Scholar] [CrossRef] [Green Version]
- Global Timer of Cortex-A9 MPCore. Available online: https://developer.arm.com/documentation/ddi0407/g/Global-timer--private-timers--and-watchdog-registers/About-the-Global-Timer (accessed on 15 June 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tasks of Dual-Frequency GNSS Receiver (Baseband) | CLBs of FPGA (PL) | CPU (PS) |
|---|---|---|
| Fast I/F filtering and buffering (Primary and slave channels) | √ | |
| Acquisition (primary channel) | √ | |
| Tracking correlator (Primary and slave loops) | √ | |
| Core bridge between FPGA logic and embedded CPU | √ | √ |
| Discriminator (Primary and slave loops) | √ | |
| Robust estimator for the inner frequency aiding | √ | |
| Pseudo range forming and positioning | √ |
| Individually acquisition db-Hz | 0.882 | 0.0975 | 5.18 h | |
| Conventional aid db-Hz | 0.895 | 0.1075 | 133.03 ms | |
| Conventional aid db-Hz | 0.701 | 0.213 | 198.81 ms | |
| Conventional aid db-Hz | 0.557 | 0.350 | 277.28 ms |
| Gravitational Acceleration (G) | 1 G | 2 G | 3 G | 4G |
|---|---|---|---|---|
| Frequency ramp (Hz/s) | 51.5 Hz/s | 102.9 Hz/s | 154.5 Hz/s | 206 Hz/s |
| Settling time (ms): 3nd Slave loop | 715 ms | 721 ms | 730 ms | 890 ms |
| Settling time (ms): 2rd Slave loop | 228 ms | 230 ms | 235 ms | Lose lock |
| Settling time (ms): Fuzzy Slave loop [31] | 7 ms | 7 ms | 8 ms | 12ms |
| CLBs of FPGA | Typical Aided Acquisition | Primary Tracking Scheme with the Robust Inner Frequency Aiding | ||||
|---|---|---|---|---|---|---|
| Utilization | Available | Utilization (%) | Utilization | Available | Utilization (%) | |
| Flip-Flops | 22,865 | 437,200 | 5.23% | 19,805 | 437,200 | 4.53% |
| Look-Up Tables | 18,318 | 218,600 | 8.38% | 6952 | 218,600 | 3.18% |
| I/O | 51 | 362 | 14.09% | 51.01 | 362 | 14.09% |
| Block RAM (Mb) | 15.03 | 19.2 | 78.31% | 9.07 | 19.2 | 47.28% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, K.-Y.; Juang, J.-C.; Tsai, Y.-F.; Lin, C.-T. Efficient FPGA Implementation of a Dual-Frequency GNSS Receiver with Robust Inter-Frequency Aiding. Sensors 2021, 21, 4634. https://doi.org/10.3390/s21144634
Huang K-Y, Juang J-C, Tsai Y-F, Lin C-T. Efficient FPGA Implementation of a Dual-Frequency GNSS Receiver with Robust Inter-Frequency Aiding. Sensors. 2021; 21(14):4634. https://doi.org/10.3390/s21144634
Chicago/Turabian StyleHuang, Kuan-Ying, Jyh-Ching Juang, Yung-Fu Tsai, and Chen-Tsung Lin. 2021. "Efficient FPGA Implementation of a Dual-Frequency GNSS Receiver with Robust Inter-Frequency Aiding" Sensors 21, no. 14: 4634. https://doi.org/10.3390/s21144634