1. Introduction
Usage of wireless sensor networks (WSNs) has increased over the last decade, with multiple implementation options. WSNs differ in communication distance, network topology, device complexity and several other parameters. Each topology and technology used has their own advantages and disadvantages, which need to be taken into consideration when designing a WSN for a specific application. One of the studied communication technologies for WSNs is radio frequency identification (RFID) in the high-frequency (HF) band [
1,
2]. One of the main fields covering the HF RFID is NFC (near field communication), issued by the NFC Forum. Most of the NFC-related standards are intended for smartphones, and in 2019, two billion NFC-enabled devices were active [
3]. The vast number of such devices can be an additional reason to implement NFC-based solutions in WSNs.
A communication pair of devices is composed of a reader and a tag in which the reader generates a magnetic field, which is modulated as a means of communication with the tag. The tag can use the reader’s magnetic field for its own supply and modulates the magnetic field to respond to the reader’s requests according to standard [
4]. The important benefit of RFID sensor nodes is operation without a battery, which significantly reduces the complexity and cost of the sensor node. Furthermore, the sensor node can be highly integrated and composed only of a sensor, an integrated circuit and an inductive loop antenna. In certain cases, a battery is required for continuous sensor operation and data logging [
5]. In these specific cases, battery power can be used to power the RFID interface and improve the communication range to the reader or reduce the tag antenna size as shown in [
6,
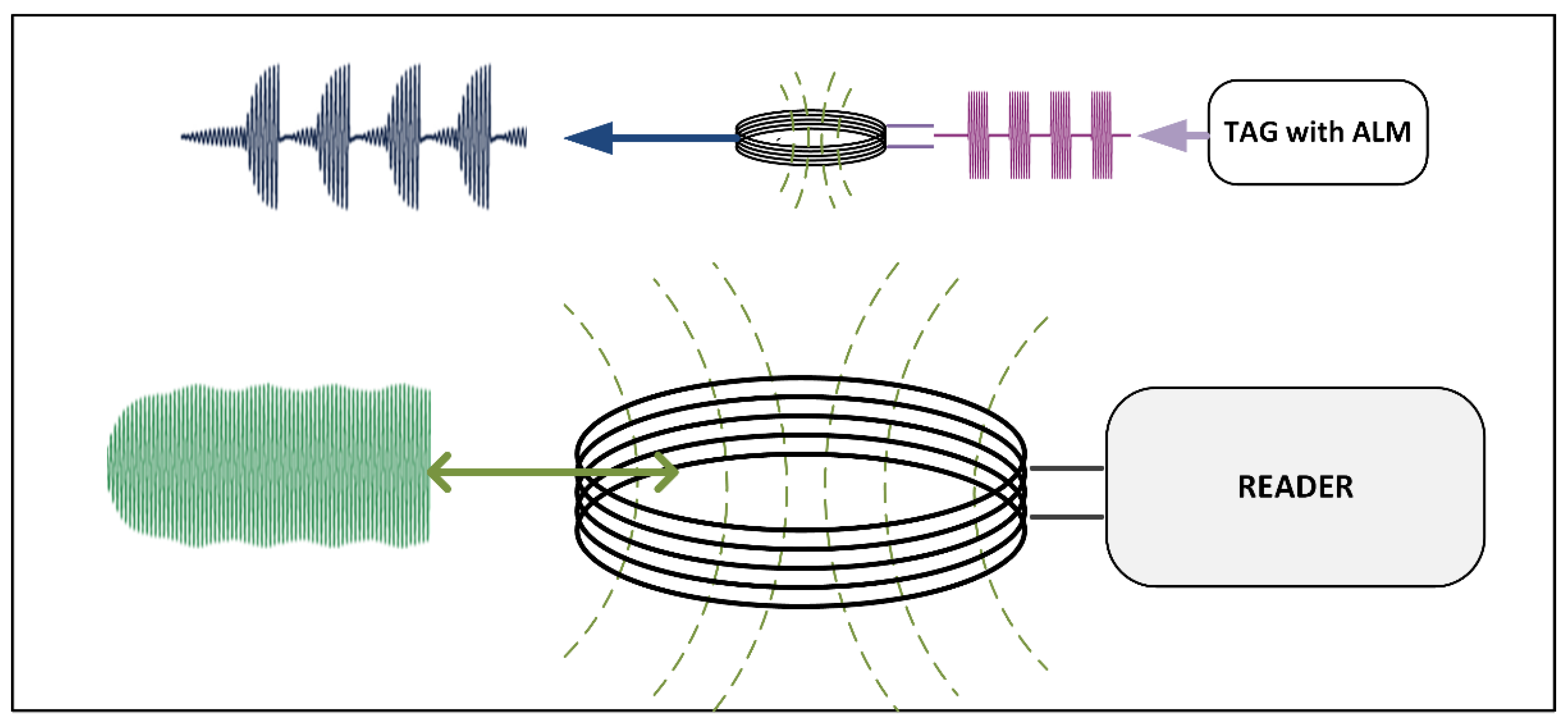
7]. The technique for the tag to actively transmit a magnetic field in such a way that the reader recognizes this magnetic field as modulation of its own magnetic field is called active load modulation (ALM). The communication pair is shown in
Figure 1, where the reader generates its own constant magnetic field. A tag with ALM transmits a modulated carrier signal, shown with magenta color. The transmitted tag signal is converted to the magnetic field on the tag’s antenna and combined with reader magnetic field, shown with blue color. On the reader side, the tag’s signal is received and is seen as similar to passive load modulation (PLM). When the ALM is performed correctly, the reader cannot distinguish ALM form PLM. Due to this property, the term card emulation is sometimes used to describe ALM.
To fulfill the requirement that the reader recognizes the tag’s magnetic field as modulation of its own magnetic field, the tag needs to guarantee the phase and frequency alignment between both magnetic fields. The core of the ALM system is a circuit for phase and frequency synchronization. In its use today, the circuit is a phase-locked loop (PLL) where the loop is locked and is tracking the reader’s magnetic field phase when the tag is not transmitting. During transmission, the PLL phase tracking is stopped, and oscillator control is placed on hold. Depending on the oscillator stability, the loop needs to relock before the PLL phase drifts too far away from the reader’s magnetic field. The synchronization performances and system architecture are determined by the stability of the PLL frequency and PLL phase in hold mode, and the phase noise of the oscillator. The goal is to minimize the phase drift between the reader’s magnetic field and the tag’s transmitted magnetic field. For this purpose, a method has been proposed to measure the phase drift of a tag using ALM [
8].
Recently, the majority of research in HF RFID and NFC has been focused on the power transfer, antenna modeling and use cases of the technology [
9,
10]. In the past, the scientific community has neglected the ALM topic and the majority, of research has been conducted within the industry, while the results of the research have been poorly reported. In recent years, a novel research on power amplifier efficiency and wireless transfer was reported using the same term, active load modulation [
11,
12,
13]. This power amplifier and wireless power transfer work is not related to the topic of ALM in HF RFID and NFC.
Authors in work [
14] presented a method and a circuit, which uses transmission gaps in the data frame to perform synchronization. This method works with lower PLL open-loop stability and has no limitation in the duration of the transmission frame, but it is limited by the antenna quality factor (Q). The proposed improvement of the active antenna damping in work [
15] increases the useful range of the acceptable antenna Q factor. The drawback of the proposed method is the manual optimization of damping parameters for each antenna design and additional antenna interface to perform the damping. A different approach has been proposed in [
16,
17], where frequency and phase synchronization are achieved before the transmission frame is started. The drawback of this synchronization is the demand for a high PLL open loop stability, which can only be achieved with the use of an accurate external reference clock, such as a crystal oscillator. In certain use cases, the external clock is not available, and this limits the usefulness of such systems. The benefit of synchronization before transmission is the possibility of transmission without the synchronization pauses, thus increasing the effective transmission power.
A circuit presented in [
18] uses an external clock for the reference and needs transmission gaps within the data frame for synchronization. This is a combination of two earlier presented systems and combines their drawbacks with no advantages. The presented system requires an external clock and an antenna with a low Q factor, which reduces the achievable communication range.
A different approach is proposed in [
19], where transmission is continuous, without pauses, and no external clock is needed. The principle of operation is a measurement of the interference on the antenna between the received reader signal and the transmitted tag signal. The limitation of the proposed system is the narrow range of valid phase differences between the reader and the tag signal, which can be used for synchronization. We have performed a measurement of a system operating according to the principles presented in [
19] for various reader to tag phase settings. The ratio between the received reader and transmitted tag signal was −25 dB. Results of tag phase error compared to ideal phase are shown in
Figure 2. At phase settings where no results are shown, the system was unstable, and communication would fail. The main limitation for instability is the operation of the phase detector, which does not work over a complete input phase range.
This paper addresses the issue of phase selection of the system presented in [
19]. First, a novel transmission method is presented, which uses a combination of different carrier phases to improve the reception on the reader side, despite the limited phase difference selection. Second, an improvement of phase measurement is shown, which allows the selection of any phase difference between the reader and tag signal.
This paper is organized as follows. In
Section 2, basic concept of ALM is presented, a novel transmission method is described, and improvement of interference measurement is given. In
Section 3, simulation results are shown for novel transmission and improved phase measurement. Discussion of the results is presented in
Section 4.
2. Materials and Methods
A tag performs active load modulation by transmission of the magnetic field, which induces voltage on the reader antenna. Induced voltage from ALM is added to existing driving voltage present in the reader antenna. To achieve only amplitude modulation (AM) of voltage on the reader antenna, the appropriate phase difference between the reader driving voltage and the tag driving voltage needs to be set. The exact phase difference to achieve AM-only modulation between the two signals depends on the sum of multiple phase shifts in the system, such as phase shift in the power amplifier, reader antenna tuning and EMC filter (electromagnetic compatibility). Antenna detuning occurs when a resonant circuit, such as a passive tag, is placed in close proximity of the antenna or when a conductive material is placed in close proximity of the antenna. Inside a conductive material eddy, currents occur, which induce their own magnetic field and reduce the inductance of the coil composing the antenna. To accommodate for the phase shift, a fine-tuning of the phase shift is performed in the design phase of a tag to guarantee interoperability with targeted readers. The exact phase shift depends on the objective of the design. Usually, the target to achieve good interoperability is to have ALM signal on the reader side seen as part AM and part phase modulation (PM). This may not be sufficient, as the environment changes dynamically and introduces an additional phase shift by detuning of the reader antenna. Therefore, the signal can become AM only or PM only. This can present a problem for certain readers and can influence the communication quality. Several readers have, for historical reasons, implemented only AM receive channels or performed selection of only one channel for the duration of transmission frame. [
20] The first version of NFC-analog specification [
21] measured reader reception only with a reference listener, which was tuned to a carrier frequency and had a resistive load. This is known to generate AM-only modulation [
22]. According to the first NFC forum release, the tag load modulation was observed only as AM modulation on a reference reader. In the latest NFC forum specifications [
23], the reader is tested with a reference tag tuned to carrier frequency and to 16 MHz, while tag load modulation is measured as subcarrier spectral amplitude. Similar developments are present in EMVCo specification [
24]. The importance of device interoperability has been observed by authors in [
25,
26], and interoperability always relays on testing against a collection of existing devices. Therefore, to achieve good interoperability operation against current standards is not sufficient. In cases when the signal is not present on both I and Q channels, the reader can choose the wrong channel, and communication fails. One solution is to readjust the phase difference after a failed communication. The described principles for reliable communication and good interoperability of ALM systems require a selectable phase shift on the tag side and a capability of the ALM system to synchronize at any phase difference. Another way to overcome the requirement of an adjustable phase difference is to transmit a signal that is always present at both AM and PM on the reader side regardless of the phase difference. To fulfill the latter, a novel modulation technique is proposed.
2.1. Orthogonal Phase Transition Shaping
Subcarrier modulation of a carrier is shown on the I-Q diagram given in
Figure 3a. The I-Q diagram is given from the reader’s perspective, where the phase difference between the reader signal and the received tag signal is an arbitrary value φ. The tag transmits two modulated states MS1 and MS2, which represent two subcarrier states and have the same amplitude and phase difference of 180°. There exists the phase difference φ, where both MS1 and MS2 will be aligned to I or to Q axis, resulting in modulation present only in I or only on Q channel. We can further try to find a combination of MS1 and MS2 with different phase and amplitude used for modulation, but there will always exist a phase difference φ where modulation is present only on I or Q channel on the reader side.
The solution to avoid having only I or only Q channel modulation on the reader side is to use two intermediate modulated states MS1’ and MS2’, which are orthogonal to existing states MS1 and MS2. The I-Q diagram with additional modulation states is shown in
Figure 3b. The tag transmits a short state MS1′ for each transition from MS1 to MS2 and transmits a short state of MS2′ for each transition from MS2 to MS1. The transition from MS1 to MS2 and back to MS1 with intermediate states can now be seen as an ellipse, which is always projected to both I and Q axes. This results in modulation on both I and Q channel, regardless of phase shift φ. The duration of intermediate state MS1’ and MS2’ has to be optimized for the particular carrier and subcarrier frequency. We call this modulation technique orthogonal phase transition shaping (OPTS).
Certain protocols define binary phase shift-keying (BPSK) modulation of a subcarrier. In these cases, MS1 or MS2 may be followed by the same modulation state, resulting in modulation, which is only present on I or Q channel during the repeated modulated state. To solve this problem, transmission of an intermediate modulation state is added between two repeated modulated states. This is visualized in
Figure 3c, where two consecutive MS2 states are separated by MS2’. This technique guarantees that information is present on both reader channels regardless of the phase difference φ. It solves the problem of interoperability by reducing the phase difference dependence on the AM and PM reader received signal strength. To maximize the performance and to increase the signal strength on only one channel, a fine phase setting is still beneficial. The phase measurement improvement, which allows synchronization with any phase difference, is presented in the next subsection.
Modulation in time domain is given in
Figure 4. Data and subcarrier signals are shown in the upper trace. Modulated subcarrier is generated according to NFC B protocol. The section marked with orange ellipse is zoomed in on the lower trace. Modulated carrier is shown for three different transmission modes. The most basic transmission mode is AND mode, where the carrier is turned on and off. The second case is XOR mode, where the carrier signal is BPSK modulated, and carrier phase is inverted when modulated subcarrier is in a high logic state. This is the type of operation presented with phasors in
Figure 3a. The last case is OPTS. The color of carrier signal corresponds to transmission phase, where green is the reference phase, purple is shifted for 90°, red for 180° and purple for 270°. For a modulated subcarrier transition, carrier is phase modulated according to I-Q diagram shown in
Figure 3b. In the case, when data transition occurs, the modulated subcarrier value does not change. To guarantee signal on I and Q channel, the carrier is phase modulated according to diagram shown on
Figure 3c.
2.2. Tag and Reader Antenna Model
For the reader antenna model, we have used the NFC Forum specified Poller 0 antenna. The reader antenna schematic and model are shown in
Figure 5. The standard specifies the antenna as the mechanical dimensions of the printed circuit board (PCB) traces. We have used Agilent E5071C network analyzer to measure and model the antenna coil (L
A, C
A, R
A) for use in simulation. The capacitors C2 and C4 are specified as variable capacitors used to tune the antenna. A test method is described in the NFC specification to use a network analyzer and s-parameter measurement to trim the variable capacitor. Cadence SpectreRF sp analysis, which calculates the s parameters, was used. Values of obtained circuit elements are shown in
Table 1.
To model a realistic reader I and Q channels, we used two mixers with 90° shifted clocks and analog filters. The filters are a series connection of a second-order low-pass filter with cut-off frequency at 3 MHz and a first-order high-pass filter with cut-off frequency at 50 kHz. Together, the filters form a band-pass filter and are needed to remove unwanted products of the mixing.
The tag antenna model is shown in
Figure 6. The D-class power amplifier output is connected to L2 and L3, which together with C4 and C5, form a low pass filter, used to suppress EMC emission. L1 represents the antenna coil, while R1 defines the antenna Q factor. Capacitors C1, C2 and C3 form the resonant capacitance and serve as a matching network between the low pass filter and the antenna LC tank. A coupling factor of 0.05 between the reader coil LA and the tag coil L1 was used for simulation purposes. The exact value of the coupling factor varies with distance and orientation between the reader and tag antennas. Therefore, any reasonable low coupling factor can be used to model the tag antenna for TX modulation purposes.
2.3. Phase Measurement Improvement
The second solution to the described problem of phase selection is to improve the system presented in [
19] to allow synchronization at a selectable phase difference. On the tag side, a phase detector is needed to extract the reader to tag phase. The phase detector is capable of operation during continuous transmission and uses the interference in the tag’s antenna to its advantage. In the existing solution, the input phase range of the phase detector limits the selection range of tag transmission phase. The phase detector measures the phase difference between the transmitted tag signal and the tag antenna signal. The tag antenna signal is a superposition of the received reader signal and the transmitted tag signal, transformed by the tag’s antenna transfer function. The received reader signal has a noticeably lower value than the transmitted tag signal. The ratio between the received reader signal to the transmitted tag signal can be as low as −40 dB. Additionally, the transmitted tag signal is modulated with the subcarrier and data.
The settled voltage on the antenna at the end of the subcarrier half-period can be presented by phasors as shown in
Figure 7. The right side of the I-Q plane shows tag signals at the end of the subcarrier half period. The transmitted tag signal is marked with T
1 and represents the differential voltage at nodes
vtxp and
vtxn of circuit in
Figure 5. The transmitted tag signal is transformed by the antenna transfer function H
ANT, and we can write a transmitted signal on the antenna as T’
1 = T
1 |H
ANT|e
jγ, where
γ is the phase shift of the antenna transfer function. The reader signal R on the antenna is added to the transformed transmitted tag signal T’
1 and together they form the antenna voltage A
1, which is the differential voltage at the nodes
vantp and
vantn of circuit in
Figure 5.
The phase difference
γ between T
1 and T’
1 is the argument of antenna transfer function H
ANT and is composed of the phase delay of antenna resonance, antenna matching circuit and EMC filter. The transmitted signal T’
1 is larger than the received reader signal R, and by taking this into consideration, we can write the phase difference
α’ between T’
1 and A
1:
Equation (1) can be further simplified by omitting the cosine function in the denominator and approximating tan(
α’) with
α’. While the phase
φ is not constrained, the phase
α’ has a small value regardless of phase
φ if the reader amplitude |R| is smaller than the tag’s antenna voltage |T’
1|.
Not all phasors are observable during transmission. We can observe the antenna voltage A and output of the power amplifier, the transmit signal T. The phase difference between the two phasors, which can be measured with a phase detector circuit, results in the equation:
In the next modulated state MS2, the transmitted signal T
2 has opposite phase, and we can write an equation for angle
β’ using the same approximation as for (2):
The measurable phase
β is:
Measurement of single phase
α or
β is obscured by the antenna phase shift
γ. The movement of the tag or self-heating can change the electrical characteristic of the tag antenna and can introduce a change in the phase shift
γ. The time difference between the measurement of phase
α and
β is one-half period of the subcarrier and is considerably shorter compared to the dynamics of self-heating or the tag movement. Therefore, the change of antenna transfer function H
ANT between two consecutive measurements is negligible. The transmitted signals amplitudes |T1| and |T2| can also be considered constant and the resulting transmit power can also be considered constant during this short time difference. We can replace |T’
1| and |T’
2| with |T’|, which is the transmitted signal amplitude increased by gain |H
ANT|. By calculating the phase difference
α −
β we remove phase shift
γ and double the sensitivity:
The amplitude of antenna signal at the end of modulated state MS1 and MS2 can be measured using a similar approach:
As the transmitted signal T’ is considerably larger than the reader signal R, we can neglect the second term |R|
2 sin
2(φ), and by assuming that the first term is always positive, we can square root both sides of the equations. If we use the approximations and calculate the difference between (7) and (8) we obtain:
In comparison to the phase measurement, the multiplier of the cosine function is not the same as the multiplier before sine function in Equation (6). By averaging measurements of |A1| and |A2|, we can retrieve the amplitude of |T’| and use it for the division of Equation (9) to obtain the same multiplier as in Equation (6). The results of the above operation are two measurements; one is the sine function of the phase difference φ and other is the cosine function of the same phase difference. At this point, an arbitrary method can be used to determine the phase difference. In case of an analog solution, this can be an angle interpolator, while in the form of a digital solution, a CORDIC (coordinate rotation digital computer) or any other algorithm to retrieve the phase difference can be used.
4. Discussion
The proposed OPTS transmission modulation has shown promising performance gain on reader receiver side across a full range phase shift compared to existing AND and XOR transmission modulations. It was shown that the method guarantees signal on the reader I and Q channel for all phase differences between the tag and the reader. The benefit of the OPTS modulation is improved interoperability and communication reliability. This advantage is important for the cases where the environment causes detuning of antennas, which results in the phase shift of tag signal on reader side, especially on the existing installed equipment that is not operating according to latest standards. The OPTS modulation can also be used on the tag with a clock synchronization system that does not have a circuit for fine phase adjustment or if it cannot operate at arbitrary phase shift. The presented transmission mode can simplify the design of a new active tag antenna, as the designers can omit the fine phase tuning design step. The drawback of this use case is a somewhat smaller ALM signal seen on the reader side.
Our second presented solution, the improved phase detector, is capable of operation during continuous transmission. The dynamic range of the ratio between the received reader and the transmitted tag signal was shown to be between −40 and −18 dB. In this signal ratio, the range phase detector had limited phase error at the output over a full range of input phases. This phase detector operation can support a clock synchronization system to maintain a lock on reader signal regardless of phase shift between reader and tag. The ability to select the transmission phase enables the operation with XOR transmission modulation, where the tag transmission phase has to be carefully selected to guarantee the interoperability with existing equipment. The benefit of using XOR modulation is increased signal amplitude observed on reader side and increased communication range. The drawback is an additional design step in the development of a tag to guarantee the interoperability. By implementing both presented solutions, the end user designing a complete tag system with ALM has the option to decide between a simpler solution or a more complex one to increase communication range. For future work, we foresee further development of proposed techniques and implementation on an integrated circuit.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}