1. Introduction
Water is one of the most important resources for mankind. However, global desertification and water pollution have led to a steep rise in water prices. A stable water supply has become a very important concern for the general population as well as water suppliers. Most water suppliers are governments or municipalities, and non-revenue water (NRW) is an important concern for those water suppliers. NRW refers to water that has been supplied but not billed. Some of the main causes of NRW are faulty water meters, water leakage, and theft. Minimizing NRW is important, as it is directly related to the revenues earned by water suppliers. The NRW varies from region to region; it is less than 5% in countries such as Singapore and more than 70% in some parts of Africa [
1].
AMI systems use remote water metering to record all water consumption during short time intervals. These recorded values are transmitted to a server through a wireless network and stored for each customer. There are several advantages in using the AMI remote water meter system compared to the existing water meter system. First, it efficiently manages water resources and reduces NRW through real-time monitoring by locating failures/faults in the remote water meter reading (RWMR) devices before a meter-reading employee physically visits and checks them. Faulty RWMR devices are one of the main causes of NRW because the water consumption recorded may be less than the amount of water actually used owing to a failure/fault. Sometimes, even when water has been used, zero consumption may be recorded. Bursting of water pipes, another cause of NRW, can also be detected using real-time monitoring of AMI system [
2].
Second, it is possible to reduce costs using the AMI system because meter-reading employees do not have to visit the meter in person in most cases. In particular, if the number of customers increases substantially in the future, water suppliers may face a shortage of manpower and the labor cost of the meter-reading staff may increase considerably. The AMI system using remote metering solves this problem. Finally, water suppliers can provide various additional services to customers by utilizing big data on water consumption collected from their customers. It is possible to provide a user-customized rate plan as well as services such as an alarm for the elderly living alone and an alarm for freezing.
If a faulty RWMR device can be accurately and quickly predicted, the problematic device can be checked and replaced before the actual failure/fault occurs, thereby reducing the expected NRW in the future. For water suppliers such as local governments, complaints from customers that may arise from problematic devices can also be substantially reduced. Therefore, there is a need for a complete solution that can accurately identify faulty RWMR devices. However, our AMI data only stores limited information such as water flow (consumption) because it uses the AMI battery and faces other hardware issues. Therefore, it is not easy to distinguish between a healthy device and a faulty device based on the limited information collected.
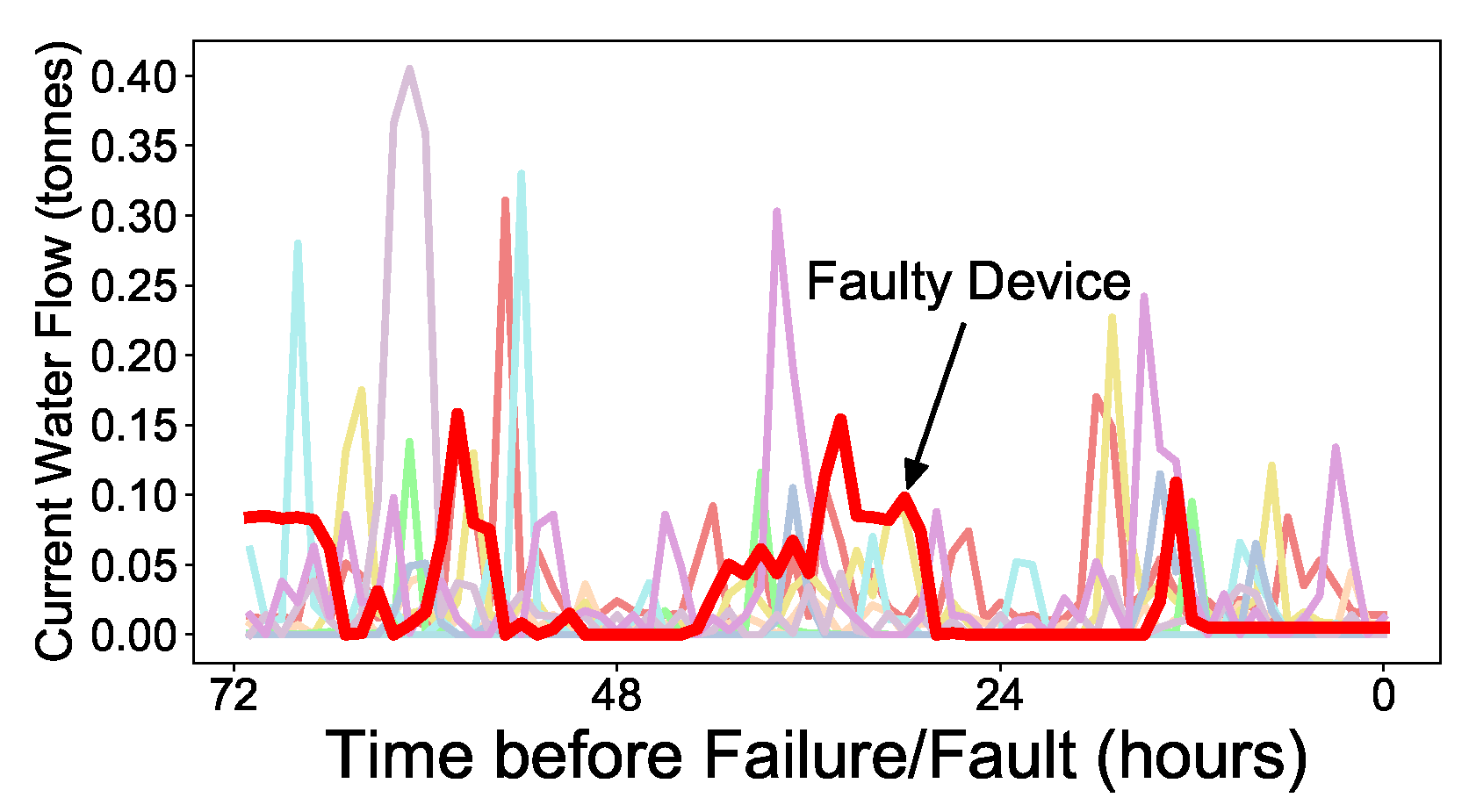
Figure 1 shows a small example. We observe that the current water flow (consumption) pattern of a faulty device may not differ significantly from that of a healthy device. To overcome this issue, we propose a complete CNN-LSTM-based solution that can accurately predict the faulty RWMR device. In particular, we propose a method to evaluate the performance of ML models by considering the costs arising from the misprediction of the ML models.
There have been many studies on hard disk drive (HDD) failure prediction for machine failure, and many failure prediction models have been developed [
3,
4]. If the HDD fails, data loss may occur and users may face economic loss. To prevent this, most HDD manufactures have implemented self-monitoring, analysis, and reporting technology (SMART). SMART determines an HDD’s health by collecting various hard disk parameters such as power-on hours and temperature [
4]. Although this SMART software provides a basic evaluation, it simply indicates that the HDD is likely to fail soon if any parameter exceeds the threshold. In addition, the threshold value of each of these parameters is confidential because only the manufacturer knows it, and the manufacturer has to replace the HDD in case of failure.
The AMI data used in this study has several differences from the SMART dataset, which is often used for HDD failure prediction. First, the SMART dataset is an indicator used by manufacturers to predict HDD failure, and there are many meaningful features that can be used for ML models. As described above, these meaningful features are set by the HDD manufacturer, and based on threshold, if any feature exceeds the threshold value, the model warns that the HDD will fail soon. The SMART dataset, which is widely used in research, has 60 features [
3]. By contrast, the AMI data collected and stored in this study only includes limited features such as pipe diameter, water flow (consumption), and AMI battery voltage value. This is because, unlike the HDD dataset, water meter AMI data uses a battery, so battery consumption must be considered, and therefore only limited information is collected and stored.
Only a few studies predict the failure/fault of AMI remote water meters or remote water meter reading devices in an actual AMI system. One study attempted to find leaks and theft in the common areas and faulty meters through machine learning by analyzing AMI data in apartment buildings [
1]. Another study attempted fault detection using a data-driven method using kernel principal component analysis (PCA) [
5]. In another work [
6], the authors analyze the AMI data using machine learning in the apartment, focusing on detecting leaks.
Unlike previous studies, we analyze big data, approximately 2,850,000 AMI data, collected from 2,762 customers for 360 days in a small-sized city in South Korea and predict the failure/fault of the RWMR device using ML models. The main contribution of our paper is summarized as follows:
Real AMI data is collected and stored using RWMR devices in a small-sized city in South Korea. A complete CNN-LSTM-based solution that can predict failures/faults in RWMR devices is proposed. A CNN-LSTM model is first used for predicting faulty RWMR devices, and the experimental results show high prediction results.
The AMI data used in this study has many missing values and limited features. Furthermore, it is a highly unbalanced dataset where the number of healthy data is much higher than the number of faulty data. We introduce an extensive preprocessing method and propose solutions for ML models to learn this challenging real-world dataset.
We perform extensive experiments to demonstrate that the CNN-LSTM model is the most appropriate for predicting faulty RWMR devices in terms of prediction accuracy and efficiency. We also propose a cost-effective threshold for evaluating the performance of ML models.
The rest of the article is organized as follows. In
Section 2, detailed descriptions of the AMI data used in this study are introduced. In
Section 3, extensive preprocessing methods are described for the AMI data. In
Section 4, we introduce the ML models used in the experiment. In
Section 5, the dataset and metrics used in the experiment are explained.
Section 6 shows experimental results. We conclude our paper in
Section 7.
3. Data Preprocessing
The AMI data used in this study is a real-world dataset, and because of the challenges mentioned above, it cannot be used directly to train the ML model and must undergo extensive preprocessing steps. The following three preprocessing steps are sequentially performed in order: data cleaning, data alignment, and missing value estimation.
3.1. Data Cleaning
The cumulative water flow is a function that increases with time because it corresponds to the cumulative water consumption of the corresponding customer. Therefore, the cumulative water flow at the current measurement time cannot be less than the cumulative water flow at the previous measurement time. However, such paradoxical cases do occur in actual AMI data. First, if the cumulative water flow at the current measurement time is smaller than the cumulative water flow of the previous measurement time, the current water flow is corrected to zero, and the cumulative water flow at the current measurement time is corrected to be the same as the cumulative water flow of the previous measurement time.
Second, if the cumulative or current water flow is not recorded for a long period, possibly owing to a failure/fault of the device or a communication problem, those data are removed. Specifically, if the cumulative or current water flow is not recorded more than six times (i.e., 6 h or more), the corresponding data is removed.
Finally, there are cases where AMI data is normally stored every hour on the hour, but one or more additional AMI data are stored in between. In this case, only the AMI data that came in on time are retained; the additionally recorded AMI data are considered to be unnecessary and removed. Furthermore, when those AMI data are removed in this manner, the removed current water flow is added to the current water flow of the next measurement time data.
Table 1 presents one such example. In this example, there exist additionally received AMI data at 12:10, not on the hour (i.e., 12:00), and it is removed and the current water flow at 13:00 is corrected.
3.2. Data Alignment
Our AMI data is collected/stored at the server every hour on the hour. However, if the measurement time interval is not one hour, it should be corrected. In this case, the cumulative water flow is first corrected by using the most basic and simple interpolation method, a linear interpolation method. After correcting the cumulative water flow, the current water flow is also corrected using the following equation:
The cumulative water flow of the current measurement time affects the current water flow of the next measurement time. Finally, using the corrected cumulative water flow of the current measurement time, the current water flow of the next measurement time is also corrected.
Table 2 presents an example. In this example, there is no AMI data collected at 13:00, but there is AMI data collected at 13:15, so the cumulative water flow at 13:00 is first computed using linear interpolation, and then the current water flow at 13:00 is also computed using (
1). Finally, the current water flow at 14:00 (next measurement time) is corrected using the difference between the cumulative water flow at 14:00 and the cumulative water flow at 13:00.
3.3. Missing Value Estimation
Our AMI dataset has a considerable amount of missing data. More than 50,000 AMI data (approximately 1.8% of the total AMI data) are missing. We observe that most of the missing values occur in the cumulative water flow, current water flow, and AMI battery voltage values. These missing values contain important information and can be caused by various reasons, such as failure/fault of the RWMR device, communication problems, and battery problems. In the case of data analysis using real data, estimation of missing values is very important. This is because if the missing values are not accurately predicted, the ML model can be trained using incorrectly predicted data, which causes the performance of the ML model to deteriorate.
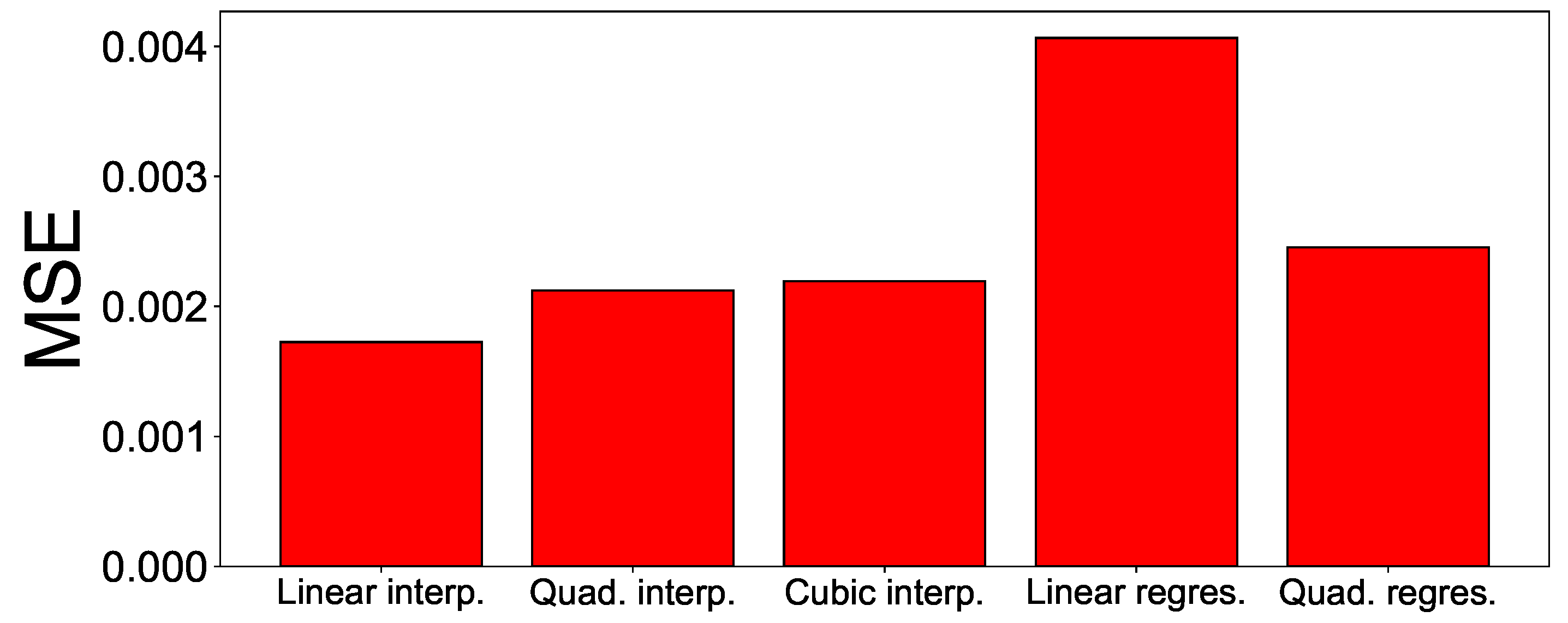
The following method is proposed to accurately predict these missing values. First, the distribution of missing data in the actual AMI data is obtained. In the previous data-cleaning step, periods of missing data spread over six consecutive hours or more are removed, so there only exist periods of missing data spread over 1–5 h in a row. In our AMI dataset, the percentage of the missing data periods is 4.6% for 1 h, 80.8% for 2 h, 0% for 3 h, 12.8% for 4 h, and 1.8% for 5 h in a row. Second, in order to evaluate various missing value estimation methods, certain lengths of AMI data that are already populated with values are removed. The length of data to be removed is sampled based on the ratio of missing data obtained as described above. This sampling process is repeated 10,000 times to intentionally remove some AMI data with values. Third, various estimation methods are used to estimate the values of data that were intentionally removed in our previous step. Finally, the estimation method with the minimum error between the actual value and the predicted value is selected. We use a mean square error (MSE) metric for comparison. Here, MSE refers to the mean square distance between the actual and predicted values. The estimation method selected in the final step is used to predict the actual missing values in the AMI data.
Five estimation methods are compared in the experiment. These are linear interpolation, quadratic interpolation, cubic interpolation, linear regression, and quadratic regression. The experimental results are shown in
Figure 3. The experimental results show that the MSE value of linear interpolation is 0.001756, which showed the smallest MSE value compared to other methods. The MSE value of linear interpolation is approximately 23% smaller than the second-best method (i.e., quadratic interpolation method).
Table 3 presents an example of predicting missing values in our AMI data using the linear interpolation method. In this example, the collected AMI data includes the data at 11:00 and 14:00, but the data in between (i.e., 12:00 and 13:00) are missing. First, the cumulative water flows at the missing time points (i.e., 12:00 and 13:00) are interpolated and added using linear interpolation, and then the current water flow in the missing section is also added using the interpolated cumulative water flow at 12:00 and 13:00. Finally, using the cumulative water flow at 13:00 and 14:00, the current water flow at 14:00 is also corrected using the difference between the cumulative water flow at 14:00 and the cumulative water flow at 13:00.
4. ML Problem Formulation and ML Models
4.1. Problem Formulation
The AMI data is assigned one of two status codes: healthy (label 0) or faulty (label 1). Here, faulty means a state such as failure/fault of the RWMR device. It should be recalled that the RWMR device is a combination of the water meter for remote meter reading and the AMI remote meter reader, which can fail in both places. We formulate the problem of predicting faulty RWMR devices as a binary classification problem. Our goal is to accurately predict the healthy/faulty state of the RWMR device using ML models. We also propose a method to evaluate the performance of the ML model by considering the cost incurred owing to mispredictions made by the ML model.
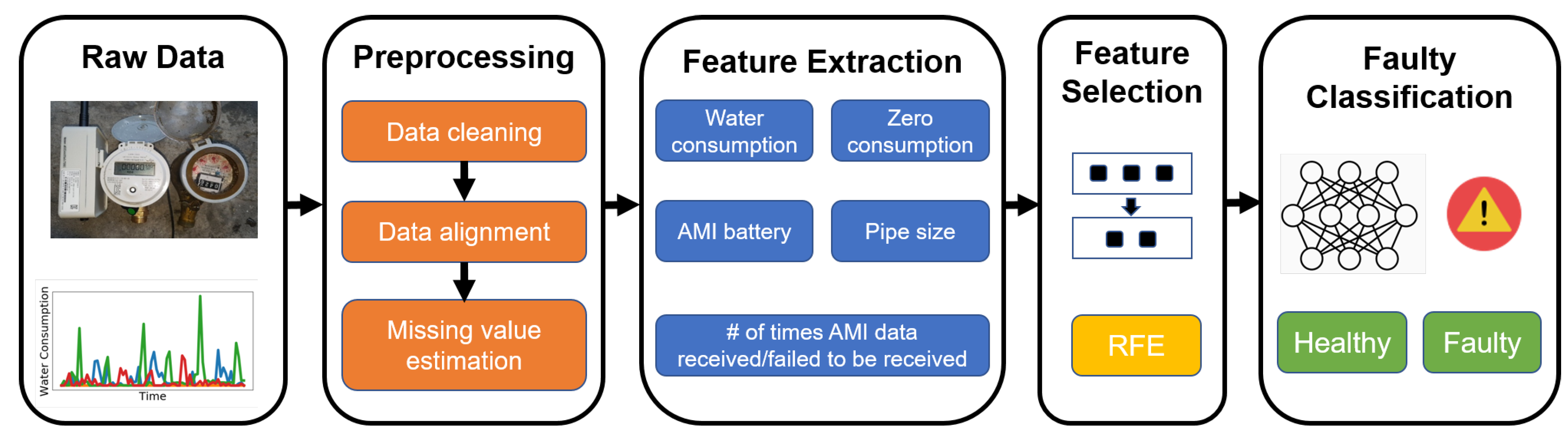
The proposed solution for predicting faulty RWMR devices is summarized in
Figure 4. It is composed of four steps. First, the extensive preprocessing methods described in
Section 3 are performed on the raw AMI data. Second, feature extraction is performed to extract meaningful features. Data after feature extraction often becomes high-dimensional data. Third, feature selection is performed to select meaningful features that significantly affect the output class. Specifically, feature selection using recursive feature elimination (RFE) is performed. Finally, fault classification is performed using the ML model, and the AMI data is predicted as being either healthy (label 0) or faulty (label 1).
4.2. Feature Extraction
When predicting faulty RWMR devices using the ML model, it is good to have as many meaningful features as possible for classification. However, only limited information is stored in the raw AMI data. Our preliminary experiments show that the performance of the ML models greatly decreased when feature extraction is not performed. To this end, 23 meaningful features are extracted. The RWMR device is a combination of the water meter for remote meter reading and the AMI remote meter reader, and failures may occur in either place. Therefore, we extract meaningful features from both places.
In relation to the water meter, features related to water consumption and features related to the history of zero consumption of customers are extracted. Here, zero consumption indicates that the current flow is zero. Zero consumption is an important feature in predicting faulty meters because, in many cases, even if the customer actually uses water, zero consumption can be recorded for a long time because of the failure/fault of the device. Zero consumption may also be recorded in genuine cases, e.g., because the customer is away from home for a long time.
Regarding the failure/fault of the AMI remote meter reader, features related to the number of times AMI data were received or failed to be received for a specific period are extracted. Basically, AMI data is sent to the server every hour, but given that AMI data can be received repeatedly in the case of device malfunction, this feature is used for feature extraction. Finally, the AMI battery voltage value may suddenly drop when the battery of the AMI remote meter reader is turned off owing to the failure/fault of the AMI remote meter reader. The actual AMI battery voltage value and whether the voltage value of the AMI battery is zero are extracted. The extracted features are divided into five categories, which can be summarized as follows:
Nine features related to the water consumption of the customer (e.g., current water consumption (flow) and standard deviation of water consumption over the last 24 h)
Three features related to zero consumption (e.g., number of instances of zero consumption during a week, number of instances of zero consumption during a month, consecutive number of zero consumption events)
Two features related to the AMI battery voltage value (e.g., AMI battery voltage value, binary number indicating whether the AMI batter voltage value is zero or not)
One feature related to pipe size where the water meter is connected
Eight features related to the number of receiving or failing to receive AMI data for a specific period (e.g., number of AMI data received over the last 24 h, number of times AMI data failed to be received over the last 24 h)
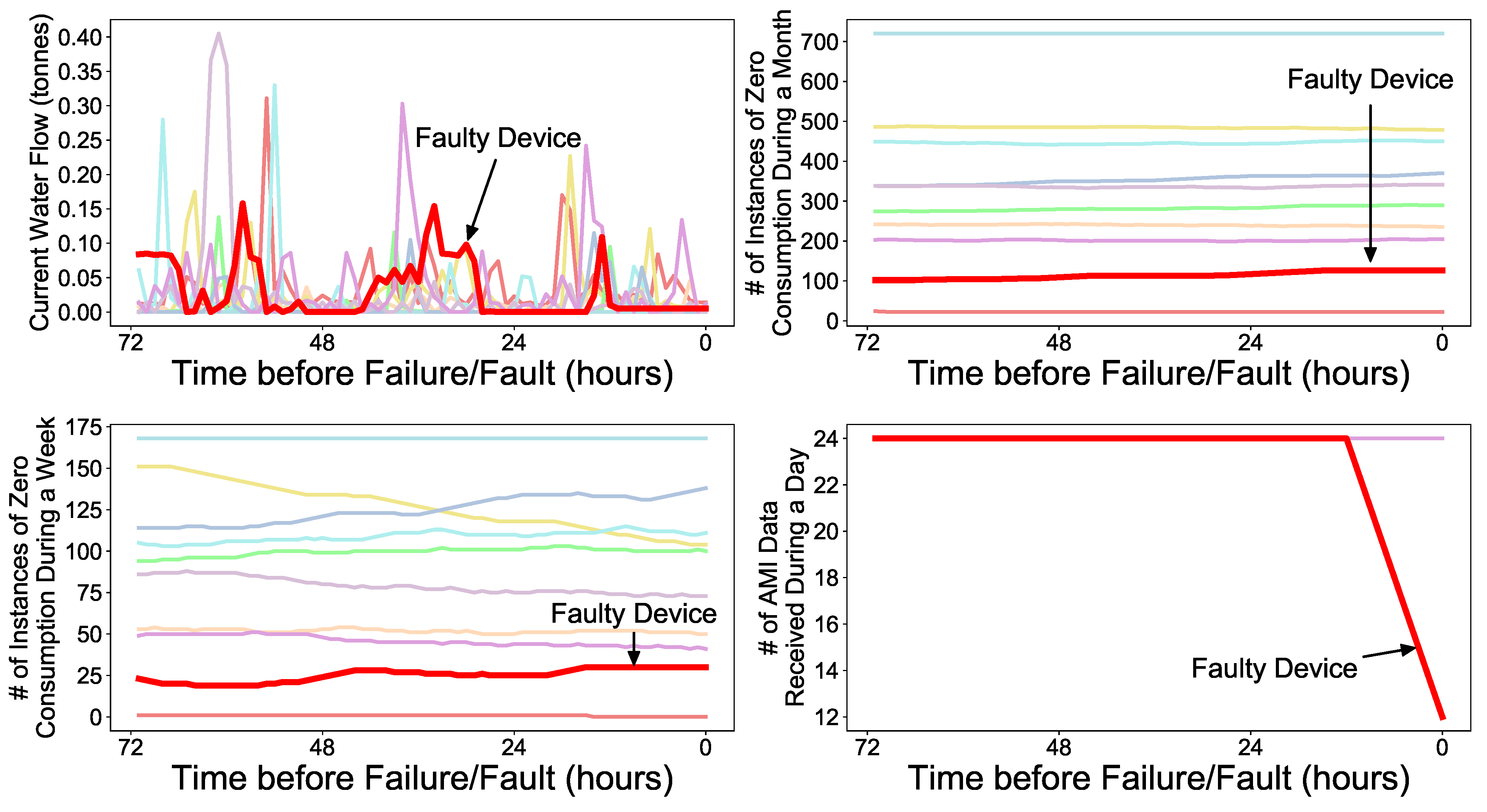
Figure 5 shows an example of several extracted feature values until actual failure/fault of the RWMR device occurs. Here, bold red denotes the faulty device and the other colors are healthy devices. We observe that several extracted features of the faulty device show distinguishable patterns from healthy devices.
4.3. Feature Selection
After performing the feature extraction step, 23 features are extracted and it becomes high-dimensional data. We select features that have a higher influence on the label of the classifier (target) for improving the performance and efficiency of the ML model. The feature selection method used in this study is a recursive feature elimination (RFE). The RFE has been widely used successfully in applications such as genetics [
7] and HDD failure detection [
3].
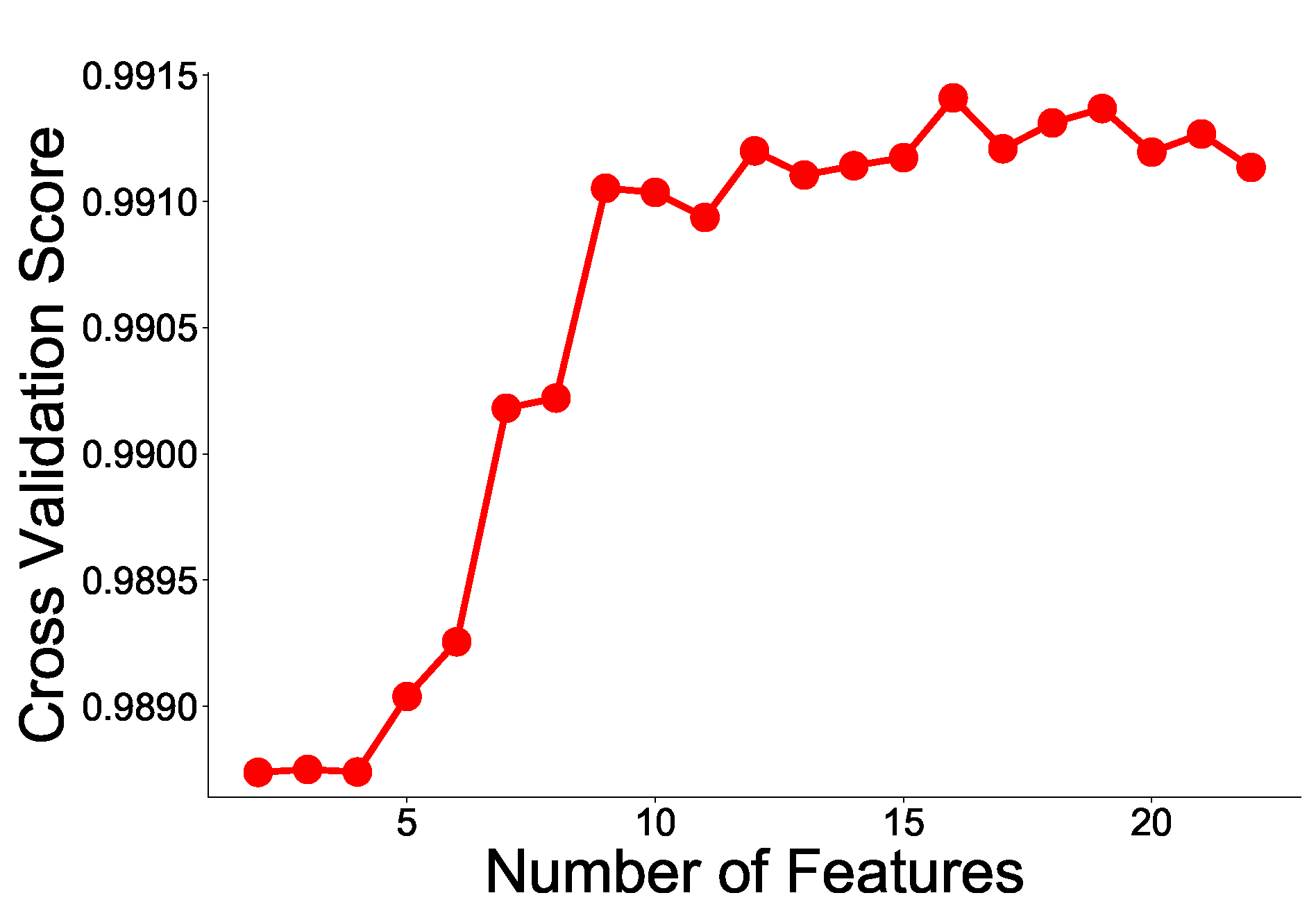
The RFE learns a classifier (e.g., Support Vector Machine) that can weight a feature for a given feature set data, removes the feature with the lowest weight, and repeats this process to reach the desired number of features. However, the user has to determine the desired number of features. As an improved method, the number of features with the best classifier performance is obtained using cross-validation. We use the RFE to rank features and select the optimal number of features using cross-validation.
4.4. ML Models
Four ML models are used to predict the failure/fault of the RWMR device. The input of the ML model is
n features,
, ⋯,
and the output is a class
y (0: healthy, 1: faulty). First, we use a random forest (RF) model, which shows good performance as a traditional ML model. In addition, a GMM-based model that shows good performance in HDD failure detection is used [
3]. Our AMI data is a time-series data. We use a deep learning-based long short-term memory (LSTM) network model, which shows good performance in time-series data. Finally, a convolutional neural network with long short-term memory (CNN-LSTM), which has recently been proven to have strengths in feature extraction and prediction of time-series data, is used. We describe each ML model as follows:
RF [8]: Random Forest (RF) is an ensemble learning-based classifier. It trains various decision trees using several training sets made by applying Bootstrap sampling to the training data, and passes new data through each tree simultaneously. Then it selects the final classification result of the data by voting on the classification result output by each tree. In this study, class
y is predicted using the mean value (soft voting) of the predicted probability value of the tree.
GMM [3]: GMM is a model that assumes that the data distribution is the sum of several Gaussian distributions. GMM models the probability for data
x given by:
where
x is a
n-dimensional vector, and
m is the number of Gaussian distributions. Here,
is the weight of the
ith Gaussian and
.
is a Gaussian probability density function with a mean vector
and a covariance matrix
and is defined as:
The model parameter
is the set of all parameters of
m Gaussian distributions,
where
i = 1, ⋯,
m. The GMM model used in this study is basically similar to the GMM model used for HDD failure detection in a previous study [
3]. The GMM-based baseline model building process and failure/fault prediction process involves the following three steps.
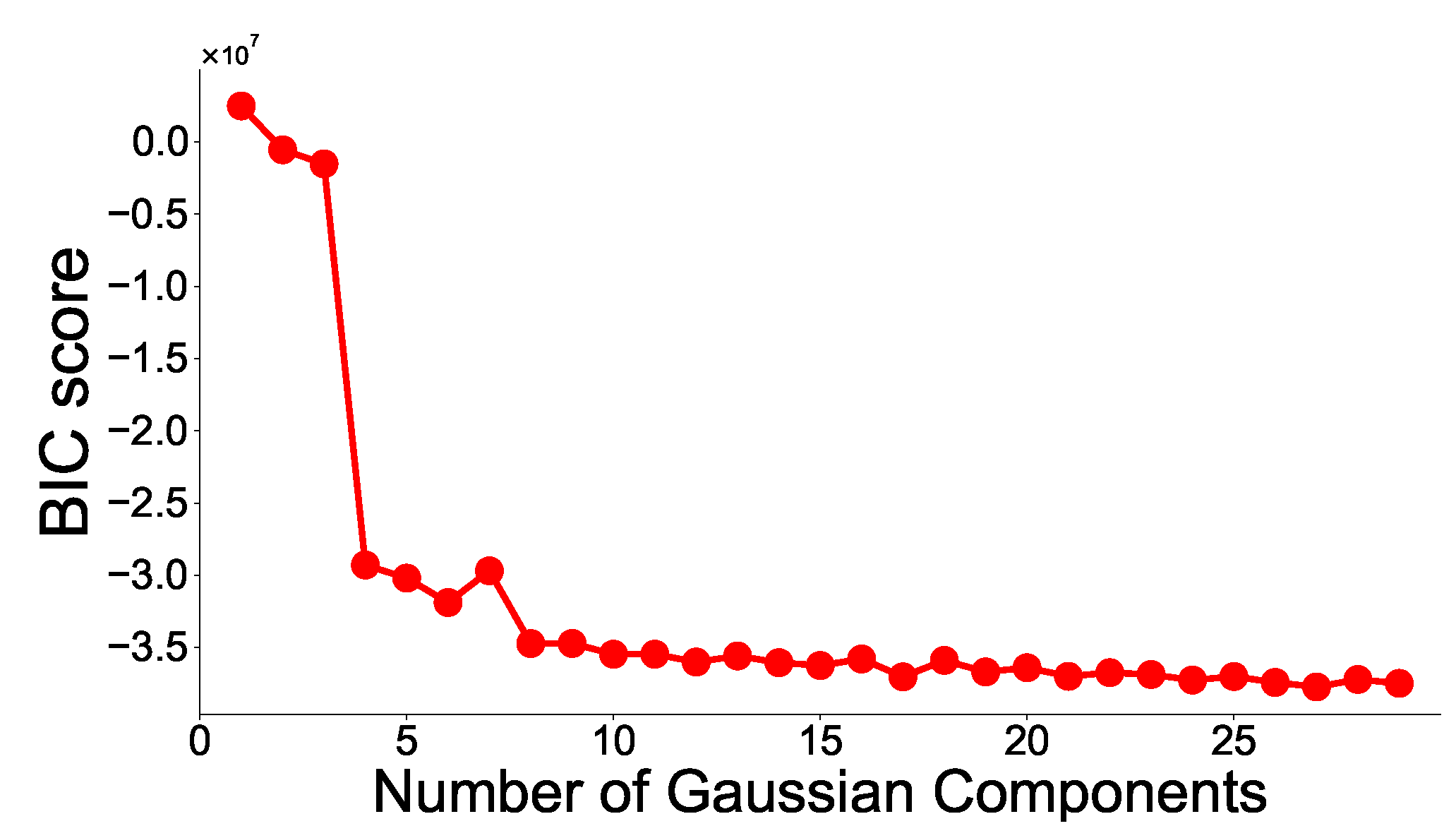
The first step is to fit the GMM through the EM algorithm using only some of the healthy data. The EM algorithm is a technique for estimating the parameters of the probability distributions when the distribution of the dataset represents the parametric probability distributions. The user must decide how many Gaussian distributions should be expressed for healthy data. In this study, the number of Gaussian distributions to use is determined using the Bayesian Information Criterion (BIC) score as shown below. The BIC score is one of the criteria to balance the log-likelihood function and model complexity, and is defined as follows:
where
is the likelihood of the dataset for the probabilistic model,
r is the number of parameters in the model, and
M is the size of the dataset. A lower BIC score indicates a better model.
The second step is to determine the likelihood baseline that divides the healthy and the faulty data. For the GMM, likelihood values of healthy and faulty data of the training data are obtained, and the likelihood baseline is determined based on them. This baseline is determined by the user in consideration of the trade-off between false alarm rate (FAR) and failure detection rate (FDR). Finally, when new data comes in at the last step, the likelihood of the GMM distribution obtained in the first step is calculated, and class y is predicted by checking whether it is less than the likelihood baseline obtained in the second step.
LSTM [9,10]: LSTM is a deep learning model in which the cell state is added to the hidden state of the recurrent neural network (RNN). It is proposed in order to solve the vanishing gradient problem that occurs when the length of the input sequence in the RNN increases. The cell state in the LSTM is like a memory, and even if the state has existed for a long time, it preserves the information for a long time and allows the gradient to propagate well. LSTM is known to achieve good performance in processing time-series data.
Disk failure prediction using LSTM has been studied earlier [
9]. Unlike the above models in which the extracted features of 1 h are inserted, the input of several hours is bundled using windowing and given as the time-series input of the LSTM to exploit the superiority of the time-series processing capability of LSTM.
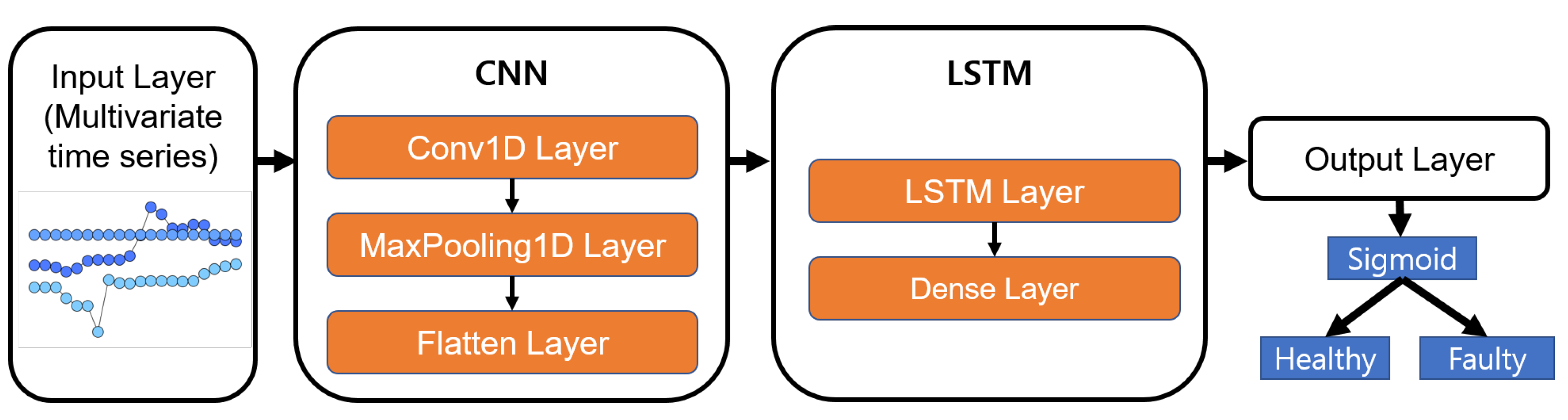
CNN-LSTM [11]: CNN-LSTM is a method of spatio-temporal deep learning that utilizes the temporal features of sequences as well as CNNs to extract features. It is a model that combines a CNN, which has strength in extracting features between adjacent space and time, and LSTM, which has strength in processing time-series data. CNN-LSTM is divided into four layers, i.e., an input layer, a convolutional network layer, an LSTM layer, and an output layer. A recent study used a CNN-LSTM structure for HDD failure prediction [
4]. However, our study is the first to use a CNN-LSTM structure to predict the failure/faults of RWMR devices from real-world AMI data.
5. Datasets and Metrics
5.1. Datasets
The AMI dataset used in this study was collected by the IS technology system. The collection period of AMI data was from 15:00 on 1 April 2020, to 12:00 on 26 March 2021, i.e., 360 days. RWMR devices were installed for 2762 customers in some areas of small-sized cities in Korea, and AMI data were collected/stored. However, AMI data is not available for all customers for all periods of 360 days because the number of customers who installed the devices gradually increases instead of all devices for all customers being installed at once. In our study, the experiment is conducted on customers who had collected AMI data for at least 6 months. The collected AMI data stores the water meter diameter, which is related to usage. The 15-mm diameter is for household use only, while the 20-mm or larger diameters can be used for household and commercial use. Approximately 85% of customers use a 15-mm pipe diameter and the rest use a 20-mm or larger pipe diameter.
After performing extensive preprocessing steps described in
Section 3, 2,284,980 healthy data and 978 faulty data are used in the experiment. However, the ratio of healthy and faulty data is highly unbalanced and the amount of faulty data is too small compared to the healthy data. It is difficult for the ML models to learn these highly unbalanced data. Especially for the GMM model, the EM algorithm needs several parameters and the time of convergence of these parameters also becomes too long when the number of data is too large.
To solve these problems, we choose healthy and faulty data in different ratios when training the ML model. Specifically, only 20% of healthy data and 50% of faulty data are used for training, and all remaining data are used for testing. When the ratio of healthy data for training is very low (e.g., 5%), we observe that the ML models fail to learn the healthy data properly, so although the recall slightly increases, the precision decreases significantly. By contrast, when the ratio of healthy data is very high (e.g., 50%), there is no significant difference in performance, but only the training time increases. When the ratio of faulty data is set as high as 80%, we observe that the results fluctuate depending on which data is selected for the test because there are too few faulty data during the test. By contrast, when the ratio of faulty data is very low (e.g., 20%), we observe that the performance significantly decreases because the ML models fail to learn the faulty data properly. Furthermore, the training and test data are chosen by random sampling without considering the customer ID. Similar to a previous study [
12], only faulty data are oversampled by a factor of 200 to the training data.
5.2. Hyperparameters
In the case of the RF model, the number of trees in the forest is set to 100, and the max depth of the tree is set to four. In the case of the GMM model, the number of Gaussians to fit the baseline is determined by the BIC score. The experimental result is shown in
Figure 6. We observe that the BIC score is minimum when the number of Gaussians is 27. Therefore, the number of Gaussians is selected as 27.
For LSTM models, the previous 72 h at the prediction time are used as the time-series input of the LSTM. Here, one step corresponds to 24 h. The first step is from the previous 71 h to the previous 48 h, the second step is from the previous 59 h to the previous 36 h, and so on. Finally, the fifth step is from the previous 23 h to the prediction time. At every step, 16 feature data (i.e., number of features) of 24 h are flattened as input, and the input with (5, 384) dimension comes in one inference. Furthermore, for the unit, the best parameter is found by performing a grid search. As a result, we create an LSTM model having a first-layer LSTM layer with 128 nodes and a first-layer multi-layer perceptron (MLP) layer that outputs one failure probability. The LSTM layer uses a tanh activation function and the MLP layer uses a sigmoid activation function. An Adam optimizer is used as in MLP and regularized using an L2 penalty of 0.01. The learning rate is given as a constant of 0.001. An epoch of 10 is used because the loss converges after 10 epochs.
In the CNN-LSTM model, similar to the LSTM model, time-series input of several times is given using windowing. The CNN-LSTM model receives time-series input in the same way as the LSTM model. There are various modified versions in addition to the basic form of CNN-LSTM, such as regional CNN-LSTM, which handles sentences of various lengths, CNN-BiLSTM, which considers bidirectional context, and CNN-GLU, which replaces LSTM with GLU. In our study, we have used a basic CNN-LSTM model that combines 1D CNN and unidirectional LSTM. The CNN-LSTM model used in our study is shown in
Figure 7. First, a CNN with the same parameters is used for every step, and the time-channel dimension is flattened to one dimension and input to the LSTM. Our CNN-LSTM consists of a 1D convolution layer, a Max-Pooling layer, a flatten layer, an LSTM layer in the first layer, and finally an MLP layer in the first layer that outputs the failure probability. The 1D convolution layer has 16 filters with a size of four, and uses valid padding and ReLU activation. The Max-Pooling layer has a size of two and a stride of two. LSTM uses 256 nodes and tanh activations. The MLP layer outputs the failure probability using the sigmoid activation function. An Adam optimizer is also used, and all layer parameters are regularized with an L2 penalty of 0.001 L2 parameters. The learning rate is given as a constant of 0.001. Similar to the LSTM model, an epoch of 10 is used.
5.3. Performance Metrics
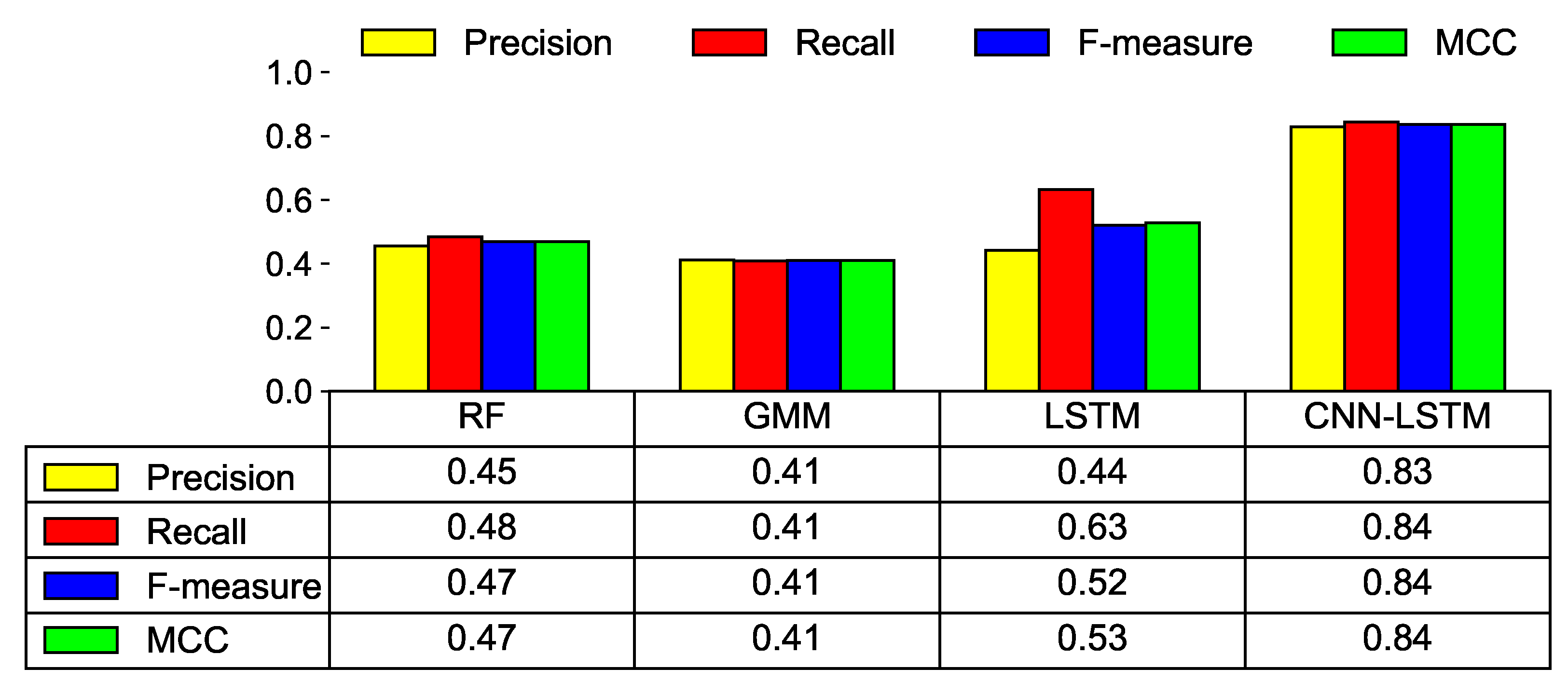
To evaluate the performance of the ML models, we use several performance metrics: precision, recall, F-measure, Matthews correlation coefficient (MCC), and receiver operating characteristic (ROC) curve. We briefly describe these metrics as follows.
Precision [13]: Precision is defined as the percentage of the faulty data among those predicted to be faulty (positive). It is calculated by the following formula:
where TP is the number of actually faulty data that are correctly predicted as faulty and FP is the number of actually healthy (negative) data that are incorrectly predicted as faulty.
Recall [13]: Recall is the percentage of the faulty data correctly identified among the actually faulty data. It is calculated using the following formula:
where FN is the number of actually faulty data that are incorrectly predicted as healthy.
F-measure [14]: Our dataset is a highly unbalanced dataset where the number of healthy data is much higher than the number of faulty data. In such a scenario, F-measure, which is the harmonic mean of precision and recall, is often used. F-measure has a value between 0 and 1, where a higher value indicates better prediction. It is defined as:
MCC [15]: MCC is known as a metric more suitable for imbalanced data than F-measure [
4]. MCC has a value between −1 and 1. When it is 1, it indicates perfect prediction, while when it is −1, it indicates inverse prediction. The MCC is defined as:
where TN is the number of healthy data that are correctly predicted as healthy.
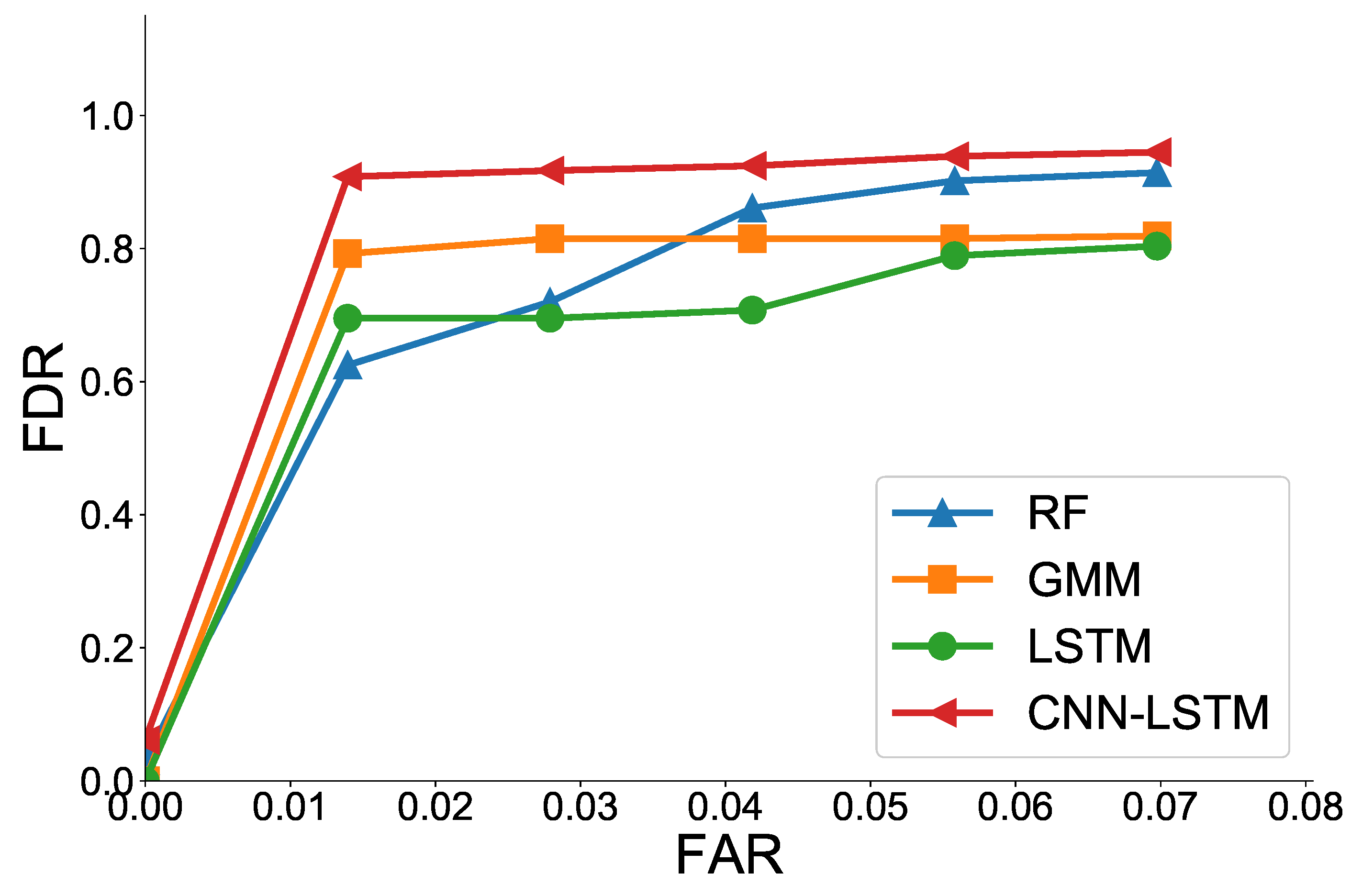
ROC curve: The ROC curve is the most commonly used performance measurement method for binary classification problems and shows a trade-off between the FAR and the FDR [
16]. FDR refers to the ratio of detected faulty data among all faulty data and corresponds to the true positive rate (TPR). It is computed as:
where
is the total number of faulty data and
is the number of detected faulty data. FAR is the percentage of data for which a false alarm occurred among total healthy data and corresponds to the false positive rate (FPR). It is computed as:
where
is the total number of healthy data and
is the number of data for which a false alarm occurred. The ROC curve is a two-dimensional graph, with FAR on the
x-axis and FDR on the
y-axis. FAR and FDR depend on what thresholds are set, and this is indicated on the ROC curve.
5.4. Threshold Selection
In most cases of HDD failure detection, FDR performance is evaluated at 0% FAR or low FAR. This is because HDD manufacturers prefer to reduce FAR because of warranty issues [
3,
17,
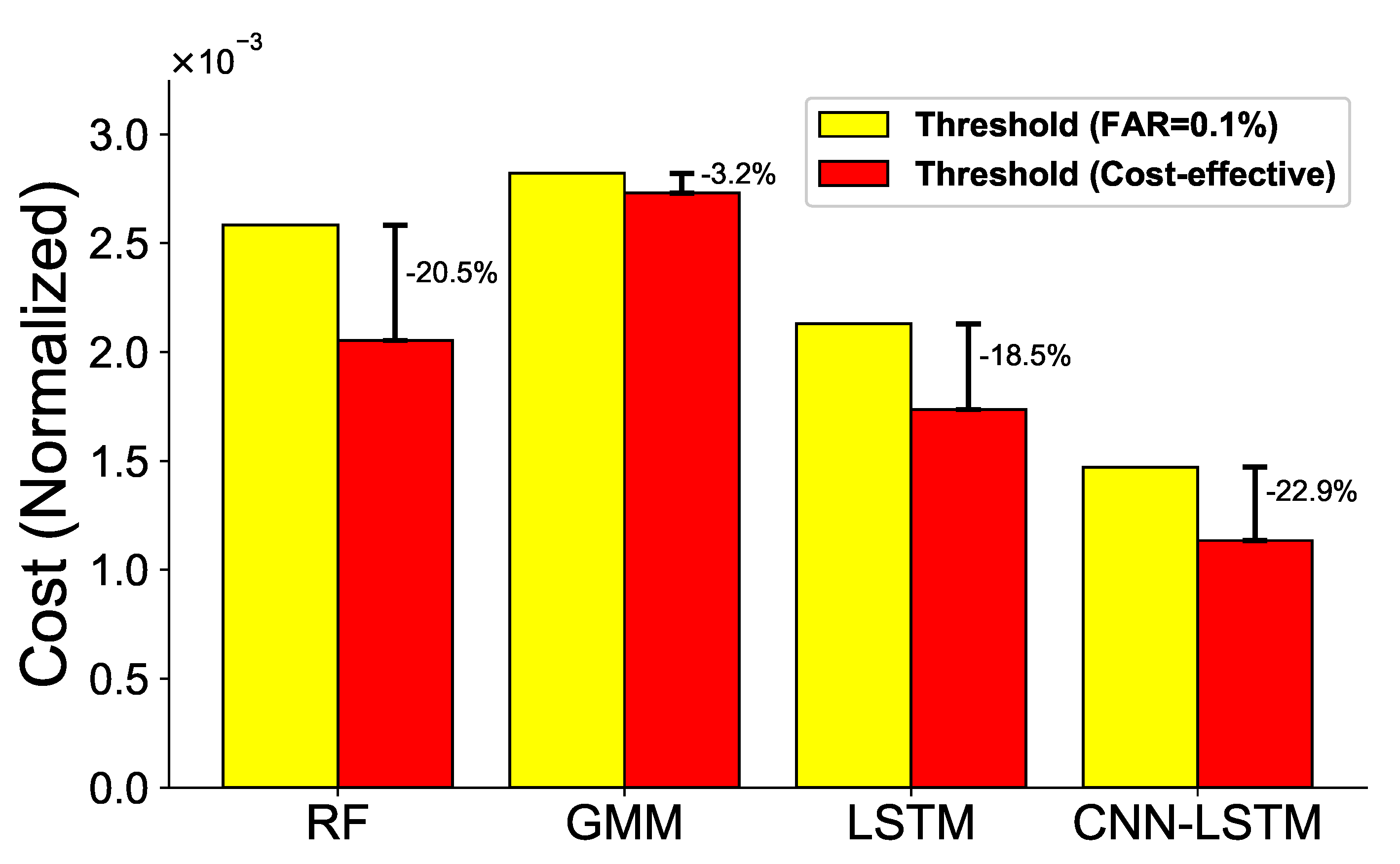
18]. In this paper, we propose a method to evaluate the performance of ML models using two threshold selection methods.
First, similar to the previous HDD failure detection problem, the performance of ML models at low FAR is evaluated. Specifically, the threshold is set to FAR = 0.1%. In the case of the dataset used for the experiment, the total number of our AMI data is approximately 2,280,000, and the FAR = 0.1% standard gives approximately 2280 total false alarms (FP) per year. As the number of customers used in the experiment is 2762, false alarms occur approximately once a year per customer. This number of false alarms is considered to be an acceptable number for water suppliers and customers.
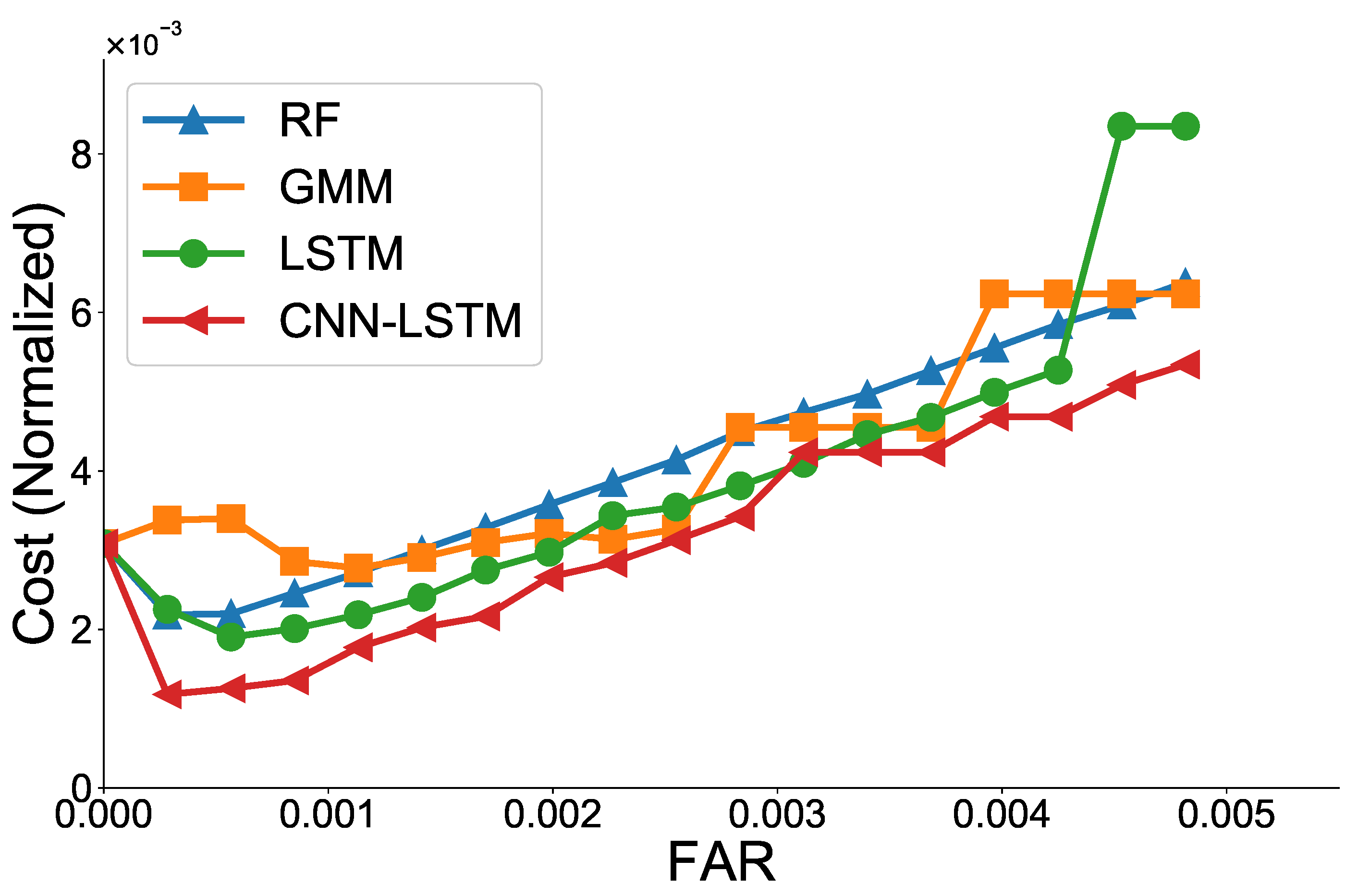
Second, we propose a method to set a threshold for evaluating the performance of ML models in terms of total cost. In case of a false alarm, the cost of the (device) manufacturer increases when a technician is unnecessarily sent. By contrast, false negatives (FN) may cause NRW because the ML model fails to predict the actual failure/faults of the device. If the model fails to predict the actual failure/faults, less water consumption may be recorded in the water meter than the amount used by the customer, and zero consumption may be recorded even though water is actually used. FPs and FNs are not good for manufacturers and water suppliers. From the manufacturer’s point of view (e.g., IS technology), we consider FNs to be a more serious problem than FP because, in the case of false alarms, the customer can tolerate a certain number of false alarms and does not complain about an acceptable number of false alarms even if the predicted results are not correct. Furthermore, in such a case, the manufacturer can send a technician only if multiple alarms occur in a row.
Thus, there is a trade-off between FP and FN in terms of cost [
4]. Let
and
be the ratios of healthy and faulty data among all data, receptively. The cost
C can be defined as follows:
where
and
are defined as weights corresponding to FNR and FPR, respectively. Here, false negative rate (FNR) and false positive rate (FPR) is defined as
and
, respectively. A smaller value of
C indicates lower cost. The performance of ML models is evaluated by setting the threshold of FAR that minimizes (
11). The weight can be adjusted according to the policy of the manufacturer or water supplier. As mentioned earlier, we set
to be much larger than
because FNR is much more serious than FPR for the manufacturer. As the
C value can have a different value range for each ML model, the
C value in (
11) is normalized between 0 and 1.
7. Conclusions
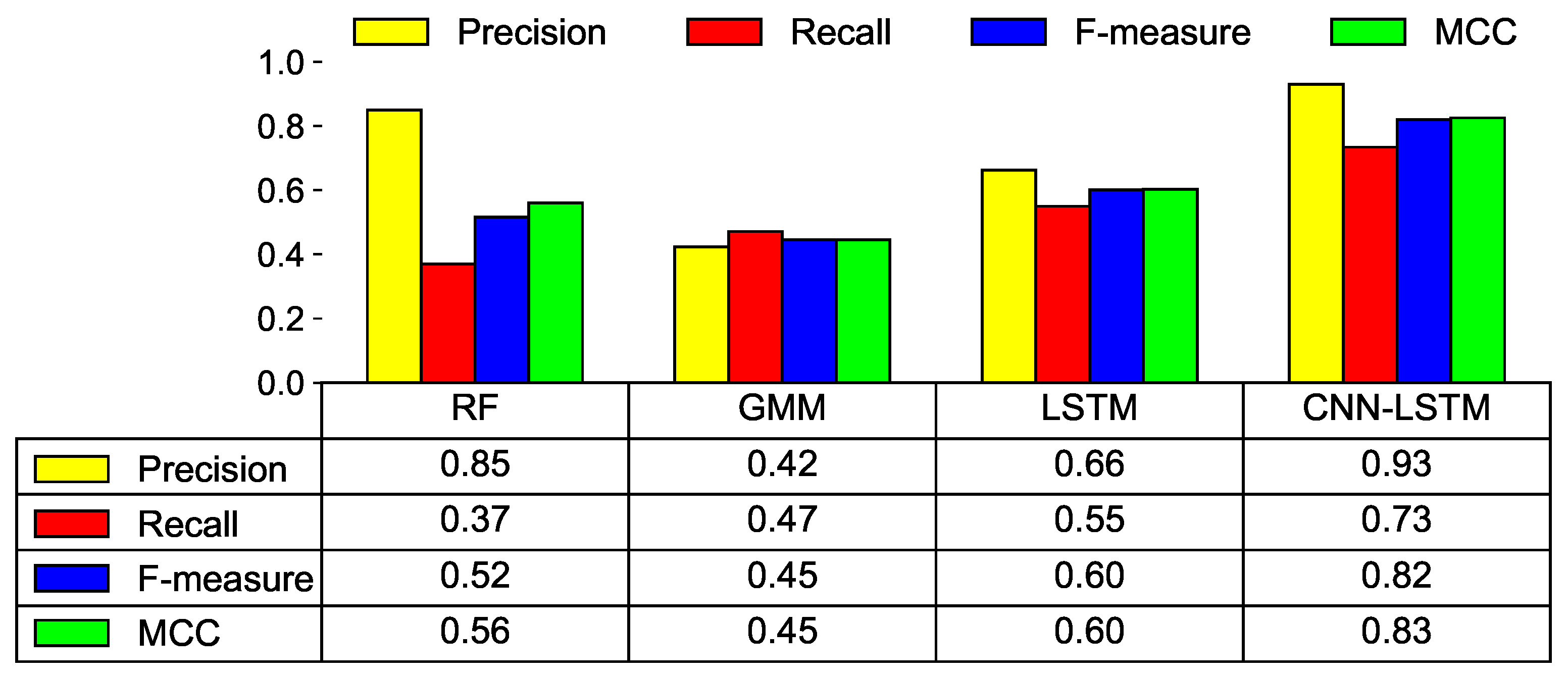
We propose a CNN-LSTM-based solution that can predict faulty RWMR devices after collecting/storing actual water AMI data in South Korea. Our experimental results show that, first, our proposed preprocessing steps are effective in handling a challenging real-world dataset with limited features, and the extracted features are meaningful features that can predict the faulty devices. Second, we observe that the features related to the AMI remote meter reader are selected as the important features on the failure/fault of the device compared to the features related to water meters for remote meter reading. Specifically, features that have the maximum influence on the failure/fault of the device are the features related to the number of instances of receiving or failing to receive AMI data during a specific period. Third, we observe that the CNN-LSTM model shows the best performance among various ML models in predicting the failure/fault of the RWMR device. Specifically, it has an F-measure of 0.82 and MCC value of 0.83 when the cost-effective threshold is used. Finally, we also observe that the cost can be reduced by 22.9% when the cost-effective threshold is used compared with the fixed threshold when the CNN-LSTM model is used.
The RWMR device is divided into two parts: a water meter for remote meter reading and an AMI remote meter reader. Currently, the AMI data does not record in which of the two parts the failure/fault occurs. In future work, we plan to collect/store AMI data on which parts of the two devices have the failures/faults and to predict which part actually has a problem. We also plan to study solutions for minimizing NRW by predicting indoor leaks or pipe leaks using ML models.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}