sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot

 , , ,
, , ,  ,
,
Abstract
:1. Introduction
2. Brief Overview of sTetro
Hardware and Software Description
3. Proposed Framework
3.1. Environmental Perception System (EPS)
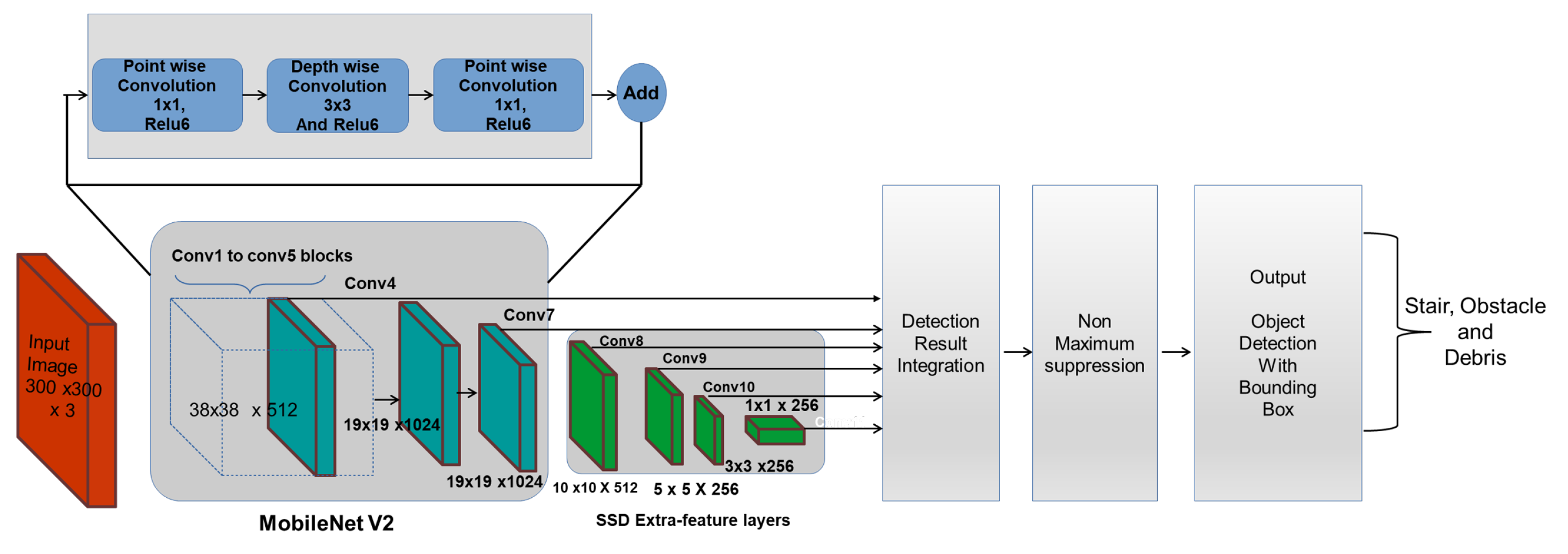
3.1.1. Object Detection
3.1.2. Depth Based False Detection Correction
3.2. Autonomous Staircase Climbing Methodology for sTetro
3.2.1. First Step Identification and Align with Staircase
| Algorithm 1: Contour detection algorithm |
 |
3.2.2. Obstacle and Debris Detection and Localization
3.2.3. Trajectory Planning
| Algorithm 2: Trajectory planning |
 |
4. Results and Discussion
4.1. Performance Metrics
4.2. Experiment in Real Environment with sTetro
Staircase Detection
4.3. First Step Detection and Localization
4.4. Obstacle Detection and Localization
4.5. Results and Analysis
Comparison with Existing Scheme
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, C.L.; Chang, C.Y.; Tang, Z.Y.; Chen, S.T. High-Efficiency Automatic Recharging Mechanism for Cleaning Robot Using Multi-Sensor. Sensors 2018, 18, 3911. [Google Scholar] [CrossRef] [Green Version]
- Ramalingam, B.; Yin, J.; Rajesh Elara, M.; Tamilselvam, Y.K.; Mohan Rayguru, M.; Muthugala, M.A.V.J.; Félix Gómez, B. A Human Support Robot for the Cleaning and Maintenance of Door Handles Using a Deep-Learning Framework. Sensors 2020, 20, 3543. [Google Scholar] [CrossRef]
- Yuyao, S.; Elara, M.R.; Kalimuthu, M.; Devarassu, M. sTetro: A Modular Reconfigurable Cleaning Robot. In Proceedings of the 2018 International Conference on Reconfigurable Mechanisms and Robots (ReMAR), Delft, The Netherlands, 20–22 June 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Morales, R.; Feliu, V.; González, A. Optimized obstacle avoidance trajectory generation for a reconfigurable staircase climbing wheelchair. Robot. Auton. Syst. 2010, 58, 97–114. [Google Scholar] [CrossRef]
- Chocoteco, J.; Morales, R.; Feliu, V.; Sánchez, L. Trajectory planning for a stair-climbing mobility system using laser distance sensors. IEEE Syst. J. 2014, 10, 944–956. [Google Scholar] [CrossRef]
- Yanagida, T.; Elara Mohan, R.; Pathmakumar, T.; Elangovan, K.; Iwase, M. Design and Implementation of a Shape Shifting Rolling–Crawling–Wall-Climbing Robot. Appl. Sci. 2017, 7, 342. [Google Scholar] [CrossRef] [Green Version]
- Mihankhah, E.; Kalantari, A.; Aboosaeedan, E.; Taghirad, H.D.; Ali, S.; Moosavian, A. Autonomous staircase detection and stair climbing for a tracked mobile robot using fuzzy controller. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 1980–1985. [Google Scholar]
- Eich, M.; Grimminger, F.; Kirchner, F. A Versatile Stair-Climbing Robot for Search and Rescue Applications. In Proceedings of the 2008 IEEE International Workshop on Safety, Security and Rescue Robotics, Guilin, China, 18–22 December 2009; pp. 35–40. [Google Scholar] [CrossRef]
- Khandelwal, K.; Patel, R.; Shenoy, A.; Farooquee, S.; George, G. Application of stair climbing robot. In Proceedings of the 2015 International Conference on Technologies for Sustainable Development (ICTSD), Mumbai, India, 4–6 February 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Kakudou, T.; Nagai, I.; Watanabe, K. A cleaning robot for stairs and the simulation of stair movement. In Emerging Trends In Mobile Robotics; World Scientific: Singapore, 2010; pp. 1306–1313. [Google Scholar]
- Kakudou, T.; Watanabe, K.; Nagai, I. Study on mobile mechanism for a stair cleaning robot-Design of translational locomotion mechanism. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 1213–1216. [Google Scholar]
- Megalingam, R.K.; Prem, A.; Nair, A.H.; Pillai, A.J.; Nair, B.S. Stair case cleaning robot: Design considerations and a case study. In Proceedings of the 2016 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 6–8 April 2016; pp. 0760–0764. [Google Scholar] [CrossRef]
- Ilyas, M.; Yuyao, S.; Mohan, R.E.; Devarassu, M.; Kalimuthu, M. Design of sTetro: A modular, reconfigurable, and autonomous staircase cleaning robot. J. Sens. 2018, 2018, 8190802. [Google Scholar] [CrossRef]
- Wang, S.; Pan, H.; Zhang, C.; Tian, Y. RGB-D image-based detection of stairs, pedestrian crosswalks and traffic signs. J. Vis. Commun. Image Represent. 2014, 25, 263–272. [Google Scholar] [CrossRef]
- Chitta, S.; Jones, E.G.; Ciocarlie, M.; Hsiao, K. Perception, planning, and execution for mobile manipulation in unstructured environments. IEEE Robot. Autom. Mag. Spec. Issue Mob. Manip. 2012, 19, 58–71. [Google Scholar] [CrossRef]
- Kazemian, A.; Yuan, X.; Davtalab, O.; Khoshnevis, B. Computer vision for real-time extrusion quality monitoring and control in robotic construction. Autom. Constr. 2019, 101, 92–98. [Google Scholar] [CrossRef]
- Asadi, K.; Ramshankar, H.; Pullagurla, H.; Bhandare, A.; Shanbhag, S.; Mehta, P.; Kundu, S.; Han, K.; Lobaton, E.; Wu, T. Vision-based integrated mobile robotic system for real-time applications in construction. Autom. Constr. 2018, 96, 470–482. [Google Scholar] [CrossRef]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M.H. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Do, T.; Duong, M.; Dang, Q.; Le, M. Real-Time Self-Driving Car Navigation Using Deep Neural Network. In Proceedings of the 2018 4th International Conference on Green Technology and Sustainable Development (GTSD), Ho Chi Minh City, Vietnam, 23–24 November 2018; pp. 7–12. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H.; Zhang, X. Construction waste recycling robot for nails and screws: Computer vision technology and neural network approach. Autom. Constr. 2019, 97, 220–228. [Google Scholar] [CrossRef]
- Ramalingam, B.; Lakshmanan, A.K.; Ilyas, M.; Le, A.V.; Elara, M.R. Cascaded Machine-Learning Technique for Debris Classification in Floor-Cleaning Robot Application. Appl. Sci. 2018, 8, 2649. [Google Scholar] [CrossRef] [Green Version]
- Yin, J.; Apuroop, K.G.S.; Tamilselvam, Y.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V. Table Cleaning Task by Human Support Robot Using Deep Learning Technique. Sensors 2020, 20, 1698. [Google Scholar] [CrossRef] [Green Version]
- Ramalingam, B.; Manuel, V.H.; Elara, M.R.; Vengadesh, A.; Lakshmanan, A.K.; Ilyas, M.; James, T.J.Y. Visual Inspection of the Aircraft Surface Using a Teleoperated Reconfigurable Climbing Robot and Enhanced Deep Learning Technique. Int. J. Aerosp. Eng. 2019, 2019, 5137139. [Google Scholar] [CrossRef]
- Ramalingam, B.; Tun, T.; Mohan, R.E.; Gómez, B.F.; Cheng, R.; Balakrishnan, S.; Mohan Rayaguru, M.; Hayat, A.A. AI Enabled IoRT Framework for Rodent Activity Monitoring in a False Ceiling Environment. Sensors 2021, 21, 5326. [Google Scholar] [CrossRef]
- Bao, Z.; Li, A.; Cui, Z.; Zhang, J. Visual Place Recognition Based on Multi-level CNN Features. In Proceedings of the 3rd International Conference on Robotics, Control and Automation, Chengdu, China, 11–13 August 2018; pp. 202–207. [Google Scholar] [CrossRef]
- Patil, U.; Gujarathi, A.; Kulkarni, A.; Jain, A.; Malke, L.; Tekade, R.; Paigwar, K.; Chaturvedi, P. Deep Learning Based Stair Detection and Statistical Image Filtering for Autonomous Stair Climbing. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 159–166. [Google Scholar] [CrossRef]
- Ramalingam, B.; Hayat, A.A.; Elara, M.R.; Félix Gómez, B.; Yi, L.; Pathmakumar, T.; Rayguru, M.M.; Subramanian, S. Deep Learning Based Pavement Inspection Using Self-Reconfigurable Robot. Sensors 2021, 21, 2595. [Google Scholar] [CrossRef] [PubMed]
- Pathmakumar, T.; Kalimuthu, M.; Elara, M.R.; Ramalingam, B. An Autonomous Robot-Aided Auditing Scheme for Floor Cleaning. Sensors 2021, 21, 4332. [Google Scholar] [CrossRef] [PubMed]
- Ophoff, T.; Van Beeck, K.; Goedemé, T. Exploring RGB+ Depth Fusion for Real-Time Object Detection. Sensors 2019, 19, 866. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hou, S.; Wang, Z.; Wu, F. Object detection via deeply exploiting depth information. Neurocomputing 2018, 286, 58–66. [Google Scholar] [CrossRef]
- Couprie, C.; Farabet, C.; Najman, L.; LeCun, Y. Indoor Semantic Segmentation using depth information. arXiv 2013, arXiv:1301.3572. [Google Scholar]
- Gupta, S.; Girshick, R.; Arbeláez, P.; Malik, J. Learning Rich Features from RGB-D Images for Object Detection and Segmentation. In Computer Vision—ECCV 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Swizterland, 2014; pp. 345–360. [Google Scholar]
- Ophoff, T.; Goedemé, T.; Van Beeck, K. Improving Real-Time Pedestrian Detectors with RGB+Depth Fusion. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Tieleman, T.; Hinton, G. Lecture 6.5-RMSProp, COURSERA: Neural Networks for Machine Learning; Technical Report; University of Toronto: Toronto, ON, Canada, 2012. [Google Scholar]
- Cha, Y.J.; You, K.; Choi, W. Vision-based detection of loosened bolts using the Hough transform and support vector machines. Autom. Constr. 2016, 71, 181–188. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- CrnokiÄ, B.; ReziÄ, S.; Pehar, S. Comparision of Edge Detection Methods for Obstacles Detection in a Mobile Robot Environment. In Annals of DAAAM & Proceedings; DAAAM International: Vienna, Austria, 2016; pp. 0235–0244. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Munoz, R.; Rong, X.; Tian, Y. Depth-aware indoor staircase detection and recognition for the visually impaired. In Proceedings of the 2016 IEEE International Conference on Multimedia Expo Workshops (ICMEW), Seattle, WA, USA, 11–15 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, G.T.M.; Thung, G. Classification of trash for recyclability status. CS229 Proj. Rep. 2016, 2016, 1–6. [Google Scholar]
- Rad, M.S.; von Kaenel, A.; Droux, A.; Tieche, F.; Ouerhani, N.; Ekenel, H.K.; Thiran, J.P. A Computer Vision System to Localize and Classify Wastes on the Streets. In Proceedings of the International Conference on Computer Vision Systems, Shenzhen, China, 10–13 July 2017; pp. 195–204. [Google Scholar]
- Mittal, G.; Yagnik, K.B.; Garg, M.; Krishnan, N.C. Spotgarbage: Smartphone app to detect garbage using deep learning. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 940–945. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Specification | Interface |
|---|---|---|
| ToF sensor | SEN-02815, Range 10 cm | I2C |
| Vision sensor | Intel Real sense D435 | USB 3.0 |
| Bump sensor | Limit switch mechanism | Binary logic |
| WORM gear motor | 12 volt, 100 RPM | UART |
| Model | Accuracy (%) | Precision (%) | Recall (%) |
|---|---|---|---|
| SSD MobileNet | 85.23 | 97.72 | 79.24 |
| Proposed Scheme | 94.32 | 97.72 | 93.33 |
| Task | Accuracy (%) | Precision (%) | Recall (%) |
|---|---|---|---|
| Obstacle Detection | 93.81 | 92.78 | 94.73 |
| Debris Detection | 94.84 | 92.93 |
| Process | Average Execution Time in Jetson Nano (Millisecond) |
|---|---|
| Staircase Detection | 110.52 |
| SVM and MobileNet based False correction | 50.21 |
| First Step Detection | 40.30 |
| Obstacle & Debris Detection | 112.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramalingam, B.; Elara Mohan, R.; Balakrishnan, S.; Elangovan, K.; Félix Gómez, B.; Pathmakumar, T.; Devarassu, M.; Mohan Rayaguru, M.; Baskar, C. sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot. Sensors 2021, 21, 6279. https://doi.org/10.3390/s21186279
Ramalingam B, Elara Mohan R, Balakrishnan S, Elangovan K, Félix Gómez B, Pathmakumar T, Devarassu M, Mohan Rayaguru M, Baskar C. sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot. Sensors. 2021; 21(18):6279. https://doi.org/10.3390/s21186279
Chicago/Turabian StyleRamalingam, Balakrishnan, Rajesh Elara Mohan, Selvasundari Balakrishnan, Karthikeyan Elangovan, Braulio Félix Gómez, Thejus Pathmakumar, Manojkumar Devarassu, Madan Mohan Rayaguru, and Chanthini Baskar. 2021. "sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot" Sensors 21, no. 18: 6279. https://doi.org/10.3390/s21186279
APA StyleRamalingam, B., Elara Mohan, R., Balakrishnan, S., Elangovan, K., Félix Gómez, B., Pathmakumar, T., Devarassu, M., Mohan Rayaguru, M., & Baskar, C. (2021). sTetro-Deep Learning Powered Staircase Cleaning and Maintenance Reconfigurable Robot. Sensors, 21(18), 6279. https://doi.org/10.3390/s21186279