4.1. Parameterized Trajectory
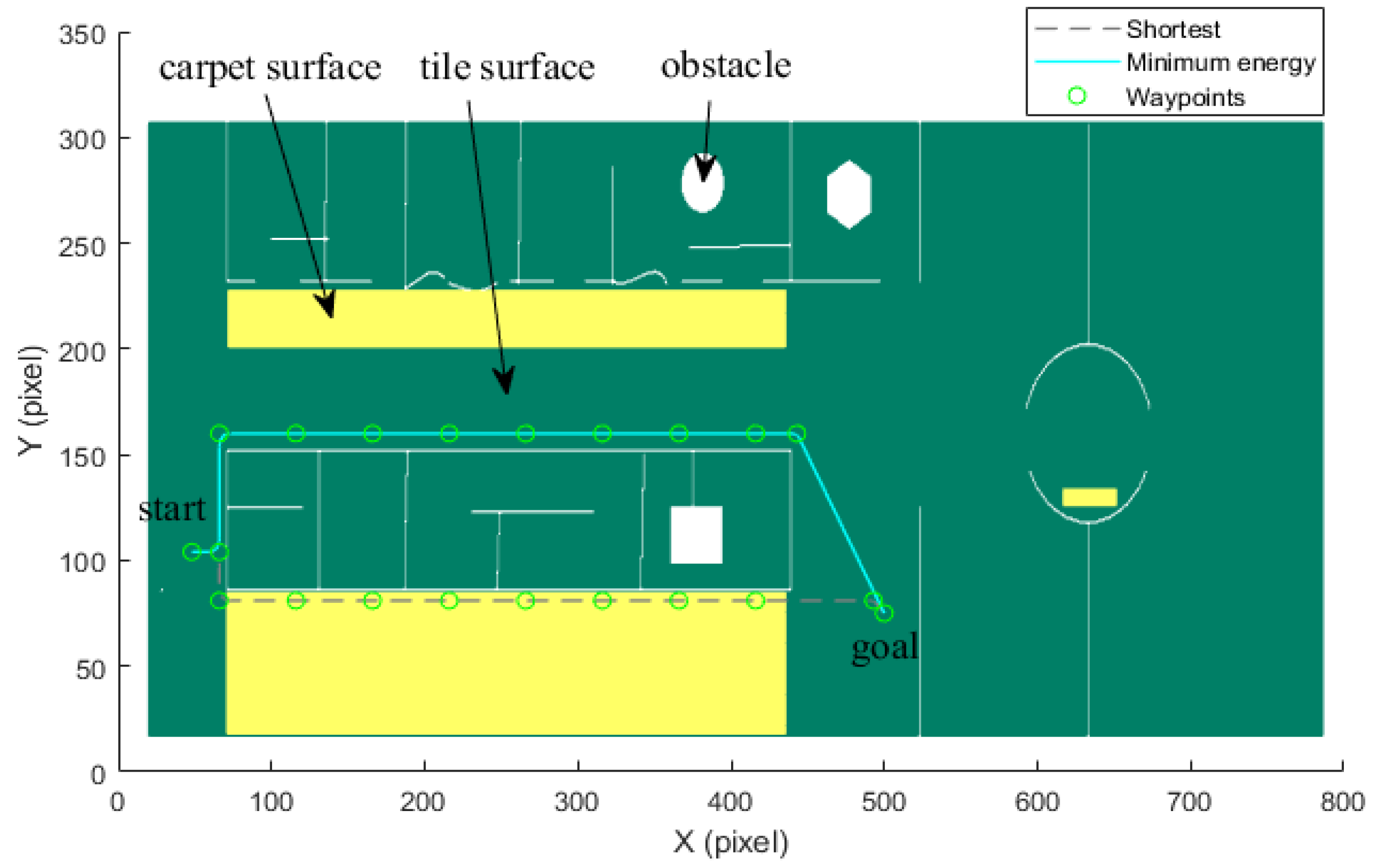
The path generated by the heuristic search method is often a piecewise linear path or even a sharp path. The mobile robot needs to start, stop, and rotate frequently due to the discontinuity of the path, resulting in time delay, energy consumption, and unnecessary wear on the robot parts. To handle these problems, we employ a parameterized cubic Bézier curve to smooth the path, which benefits from the continuity and local controllability of the Bézier curve. Furthermore, the trajectory is further optimized by explicitly taking into account localizability and energy efficiency.
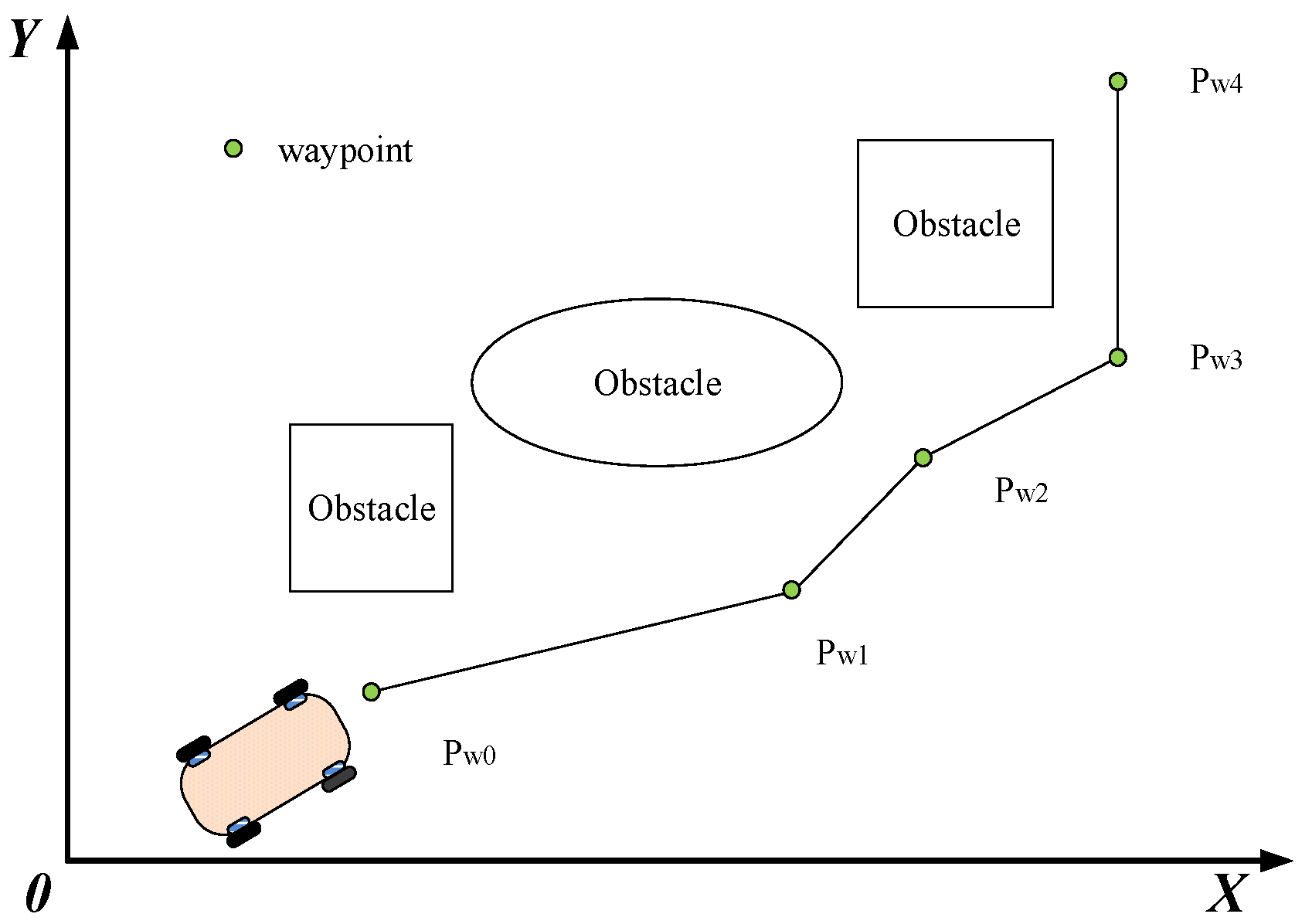
A series of Bézier curves are inserted between each segment defined by two consecutive waypoints and connected to obtain a complete smooth trajectory. As shown in
Figure 4, the knee points along the generated path are chosen as waypoints. If two near waypoints are extremely close, they are merged into one waypoint. On the other hand, if a path segment is too long, new waypoints need to be inserted [
33]. Thus, we can achieve a series of generated waypoints expressed by
. Further, we define the angular bisector of the two near segments as the orientation of the corresponding waypoints.
The cubic Bézier curve passes through the initial waypoint
and finial waypoint
of a path segment. Its sharpness can be reshaped by adjusting the two control points
and
.
and
denote the position and orientation of the corresponding waypoint, respectively. Then, the parameterized trajectory of the cubic Bézier curve is designed as follows:
Subject to:
where
and
are the trajectory with parameter
in the x and y direction, respectively.
and
are the arrival time at each waypoint for the segment
. Then, when
varies from
to
, the trajectory varies from
to
.
and
are the velocities at waypoints
and
, respectively.
It is noted that the control points
and
are dependent on the arrival time
and the velocity
. According to (18), we can obtain the control points as follows:
Consequently, by choosing suitable and , we will achieve an optimized trajectory such that the mobile robot can approach the final goal along all these waypoints.
4.2. Improved DSA
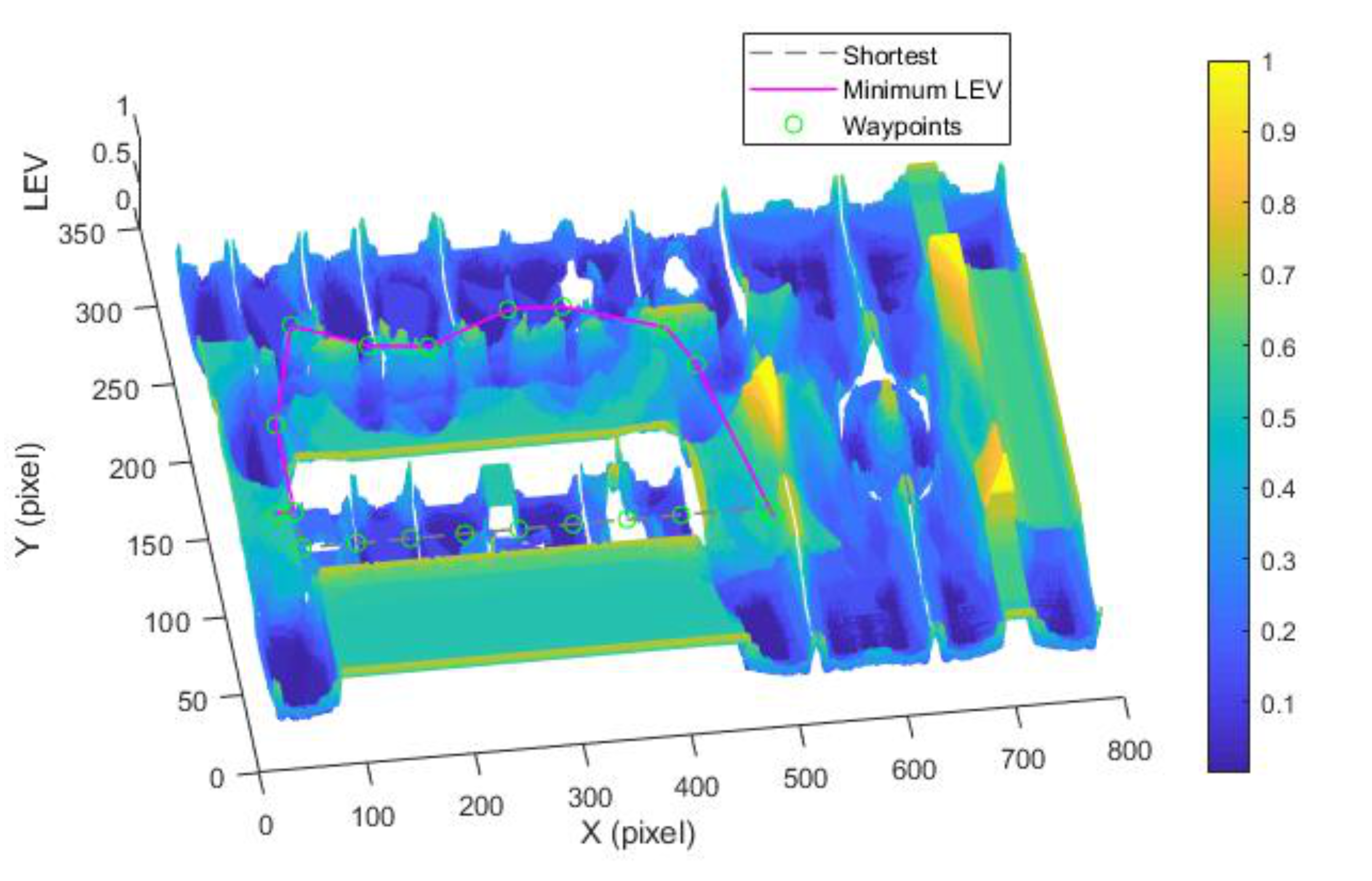
In this section, we present a trajectory smoothing method based on improved DSA by selecting parameters
and
while minimizing the localization error and minimizing energy consumption. The energy model (1) is calculated by combining the designed Bézier curve (17) as follows:
Then, we aim to solve the following optimization problem:
where
is objective function.
denotes the point on the parameterized trajectory.
and
are the coefficients to balance the weight between and localizability and energy consumption.
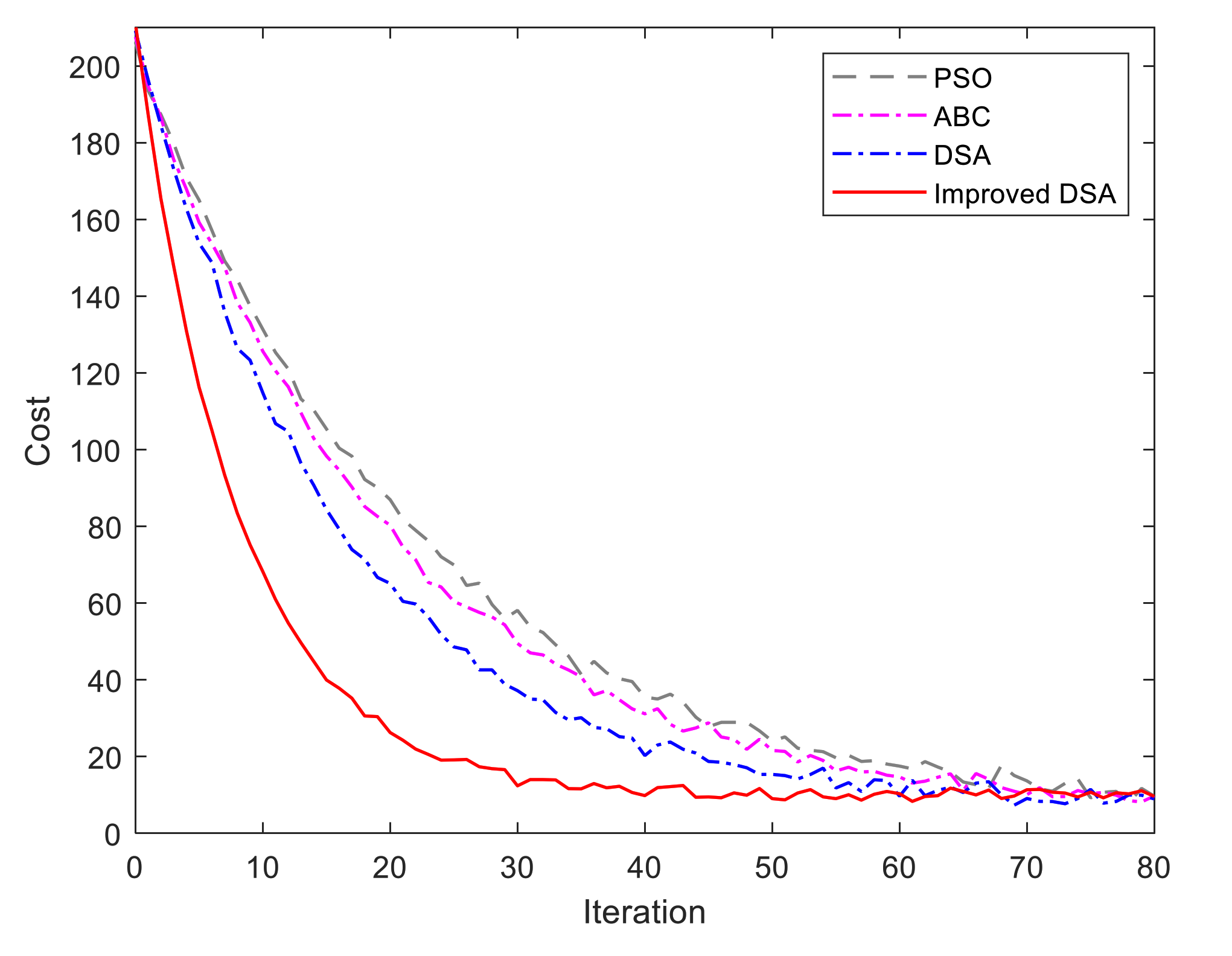
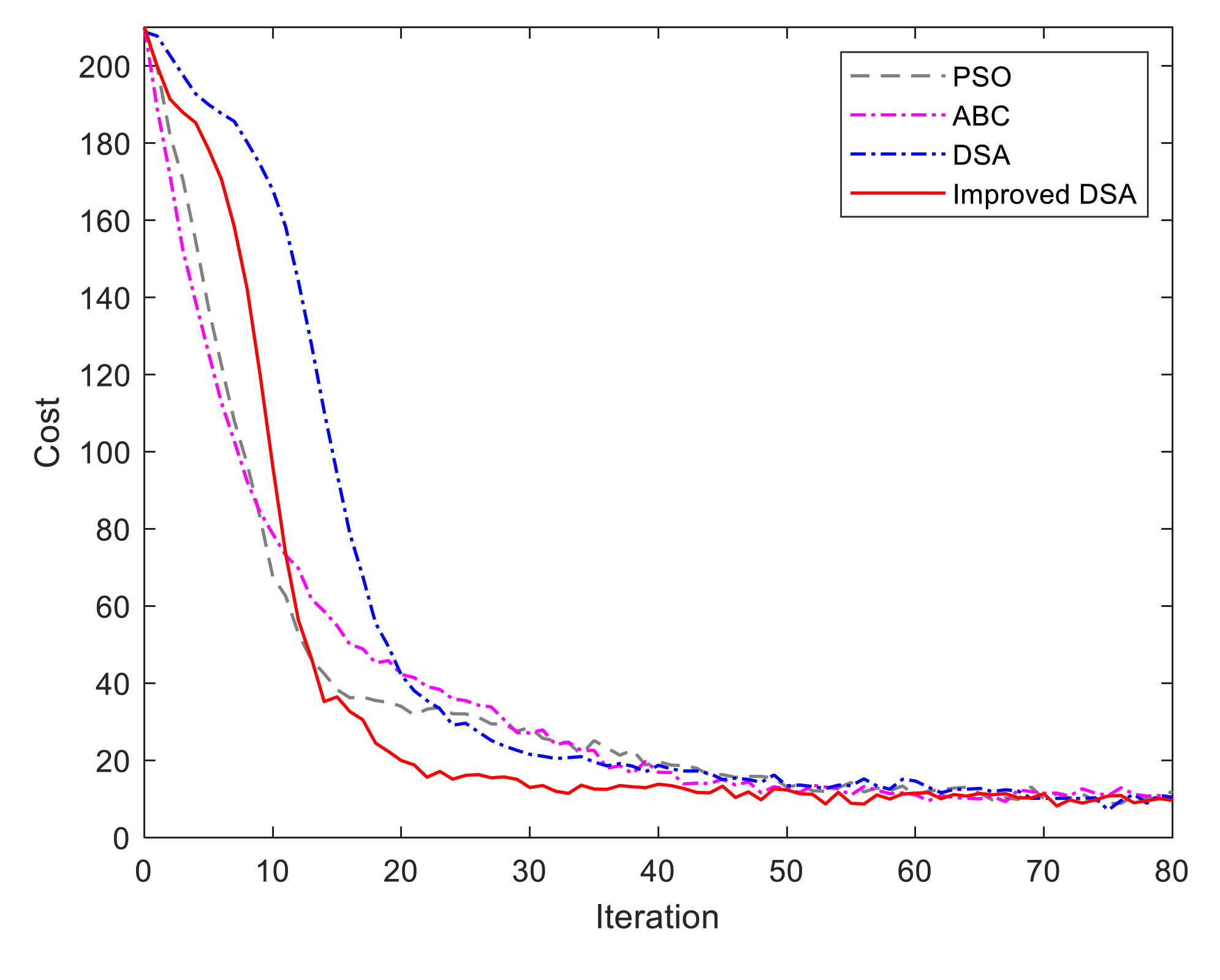
To find the most appropriate and , we present an improved DSA to enhance optimization efficiency. The DSA simulates the predatory process of dolphins for multi-dimensional numerical optimization problems with four phases, i.e., search, call, reception, and predation. This algorithm has numerous advantages of few parameters and strong search capability, which makes it have better global search ability and better stability compared with the conventional evolutionary algorithms 14.
For the DSA, for each dolphin , we define as the individual optimal solution that finds in a single time and define as the neighborhood optimal solution. Then, we have three types of distances, i.e., , and .
In the search stage, a sound wave mechanism is employed between the individual dolphin
and a new child dolphin
. More specifically, the sound is defined as
, where
is the number of sounds. A maximum search time
is set to prevent the DSA from falling into the search stage. Within the maximum search time
, the dolphin
will search a new child solution
based on the sound wave during the propagation time
, namely:
After calculating the fitness
of the new solution
, we can obtain the optimal fitness as:
Then, the individual optimal solution is specified as . If , the neighborhood optimal solution is replaced by .
In the call stage and reception stage, each dolphin informs other dolphins, through sound wave, as to whether a better solution is found and where it is located. The detailed process can be found in the literature [
14].
In the predation stage, each dolphin updates its own location to hunt for preys within a certain surrounding radius . Besides, the maximum range is set as . The update process is divided into three cases based the distance .
- (1)
If
, a new dolphin
is derived as follows:
where the surrounding radius
.
- (2)
If
,
moves in a random way to obtain a new dolphin, as below:
where the surrounding radius
.
- (3)
If
, we obtain a new dolphin
as follows:
where the surrounding radius
.
If the iterative termination condition is fulfilled, the DSA ends. Otherwise, the DSA gets into the search stage again.
The standard DSA updates the position of each dolphin and expands child dolphins to search for the optimal solution. However, it should be pointed out that a new child dolphin is fully expanded with fixed step size during the searching stage, which leads to a fall in the local optimum for one clan of a dolphin group. Moreover, the positions of the dolphins are updated based on a random way in the process of dolphin updating. Therefore, the efficiency and convergence of the DSA decrease, and the obtained solution may result in low optimization accuracy or even failure.
To address these problems, we propose an adaptive step strategy and a novel learning strategy in the optimization process to balance the convergence speed and precision of the algorithm and better exchange information between dolphins.
- (1)
Adaptive step strategy: we offer the following adaptive step parameter
.
where
is the minimum step.
and
are the current optimal fitness and the initial fitness, respectively.
denotes the current number of iterations. The factors
are the regulation parameters.
Then, the formula for searching the new child dolphin of the improved algorithm is as follows:
- (2)
Learning strategy: The searching efficiency may be enhanced if the child dolphin
learns from the information of the dolphin
since
is the individual optimal solution that
finds in a single time. Hence, the position of
can be obtained as:
where and are the impact factors.
Next, the dolphin
will learn from the individual optimal solution
. The dolphin
updates itself according to information of the dolphin
as follows:
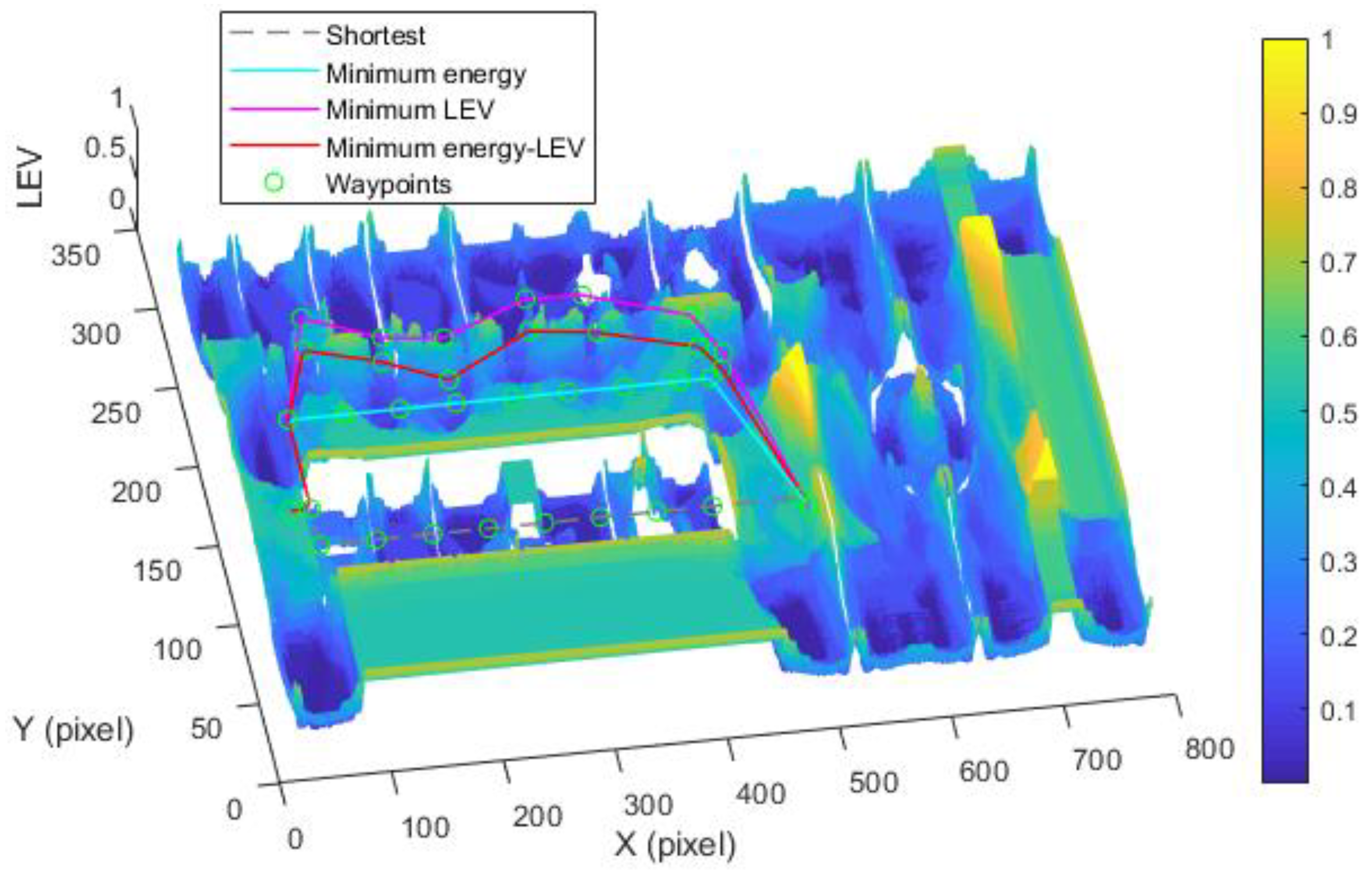
The improved DSA related to our optimization problem (21) solution is depicted in Algorithm 1. In this way, the optimal parameters can be obtained such that the mobile robot can reach the goal with energy efficiency and localizability simultaneously.
In the end, the optimal trajectory can thus be obtained through the use of this algorithm by iteration for every segment trajectory.
| Algorithm 1: Improved DSA |
| Input: the objective function J |
| Output: the parameters Ti and vi |
|


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}