
An Alignment Method Based on KF-ASMUKF Hybrid Filtering for Ship’s SINS under Mooring Conditions

Abstract
:1. Introduction
2. Description of Common Coordinate System
3. SINS Error Model with Large Misalignment
4. KF-ASMUKF Hybrid Filtering Algorithm
4.1. ASMUKF Filtering Algorithm
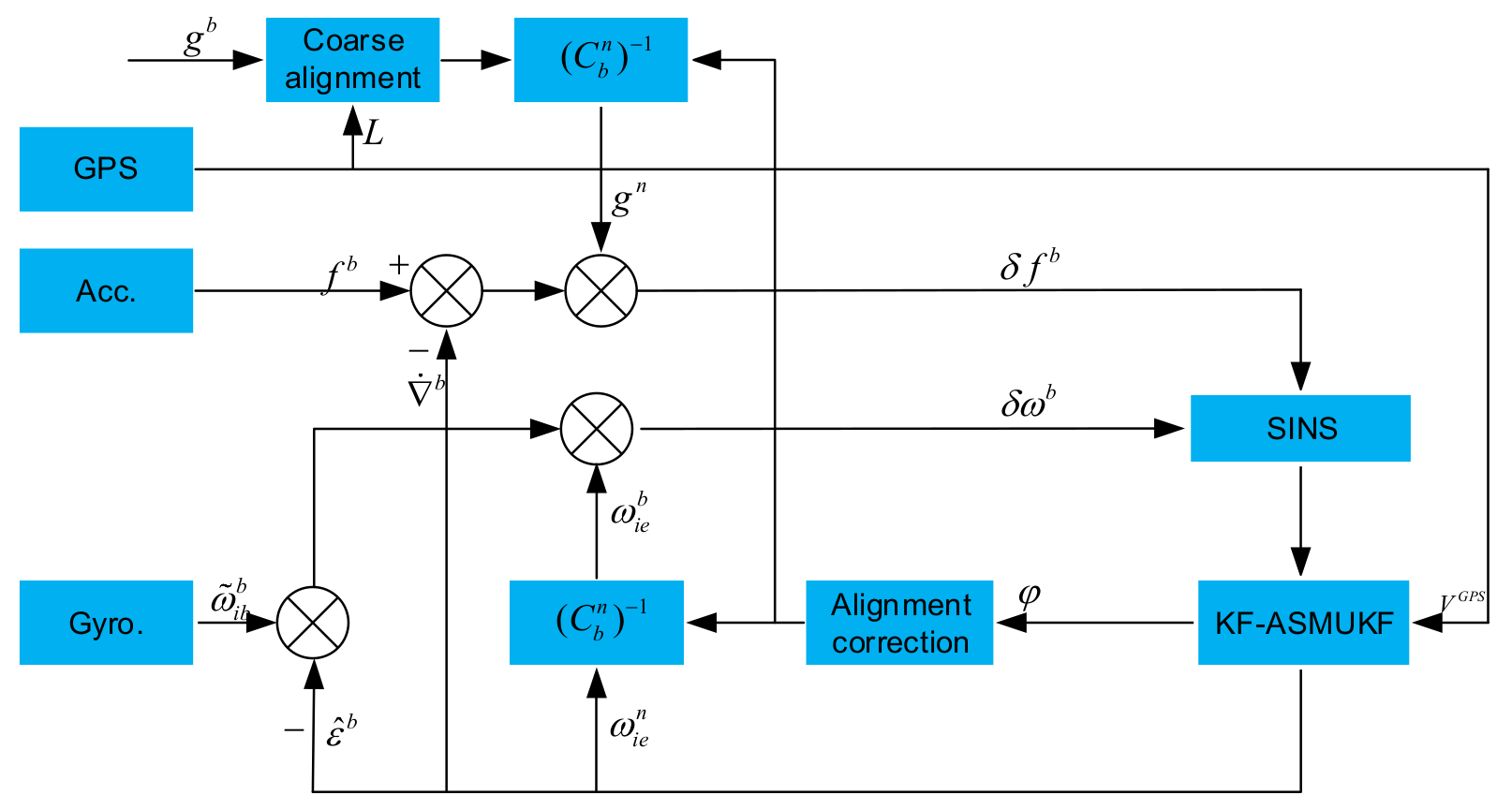
4.2. Mooring Alignment Model Based on KF-ASMUKF Hybrid filter
5. Experimental Results and Analysis
5.1. Simulation Test
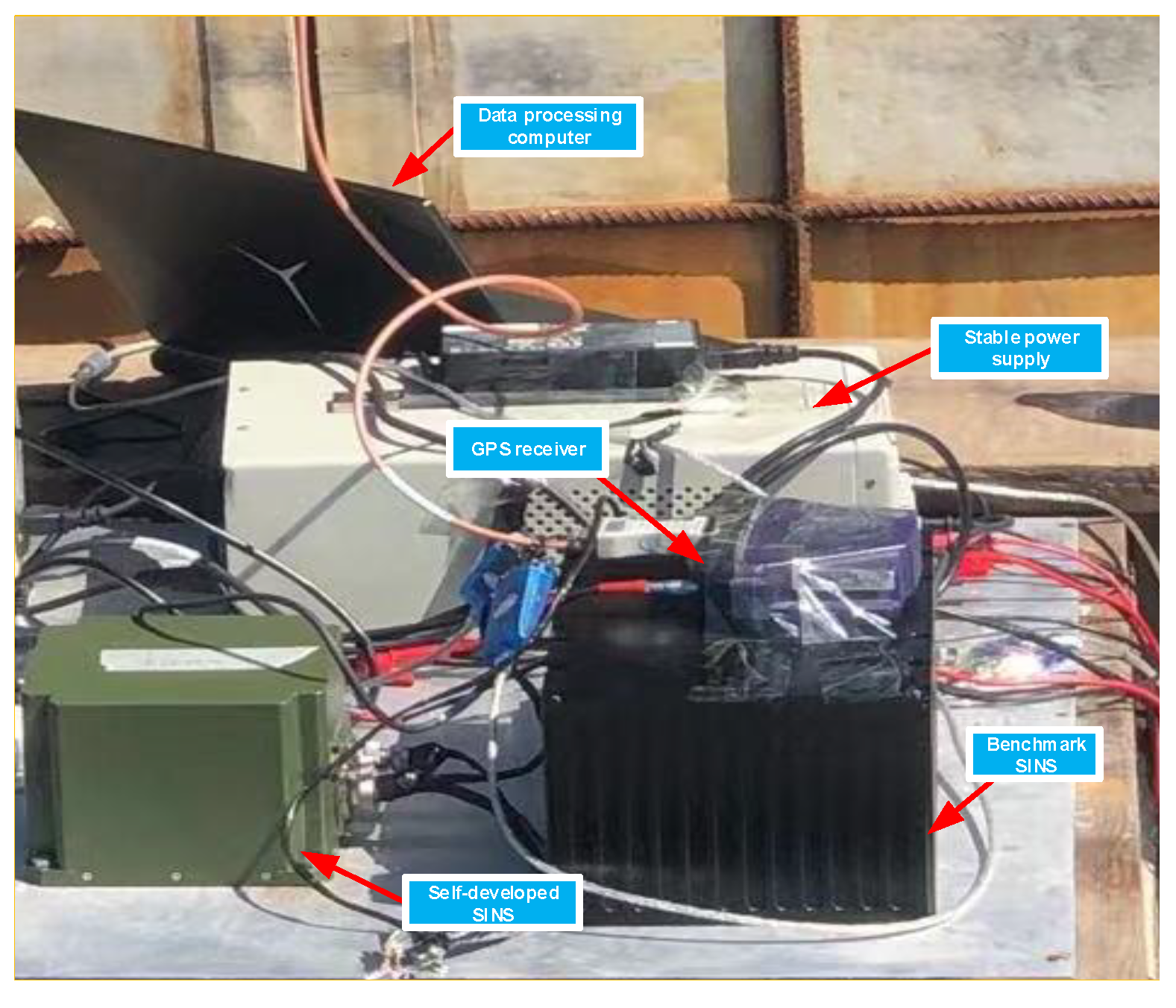
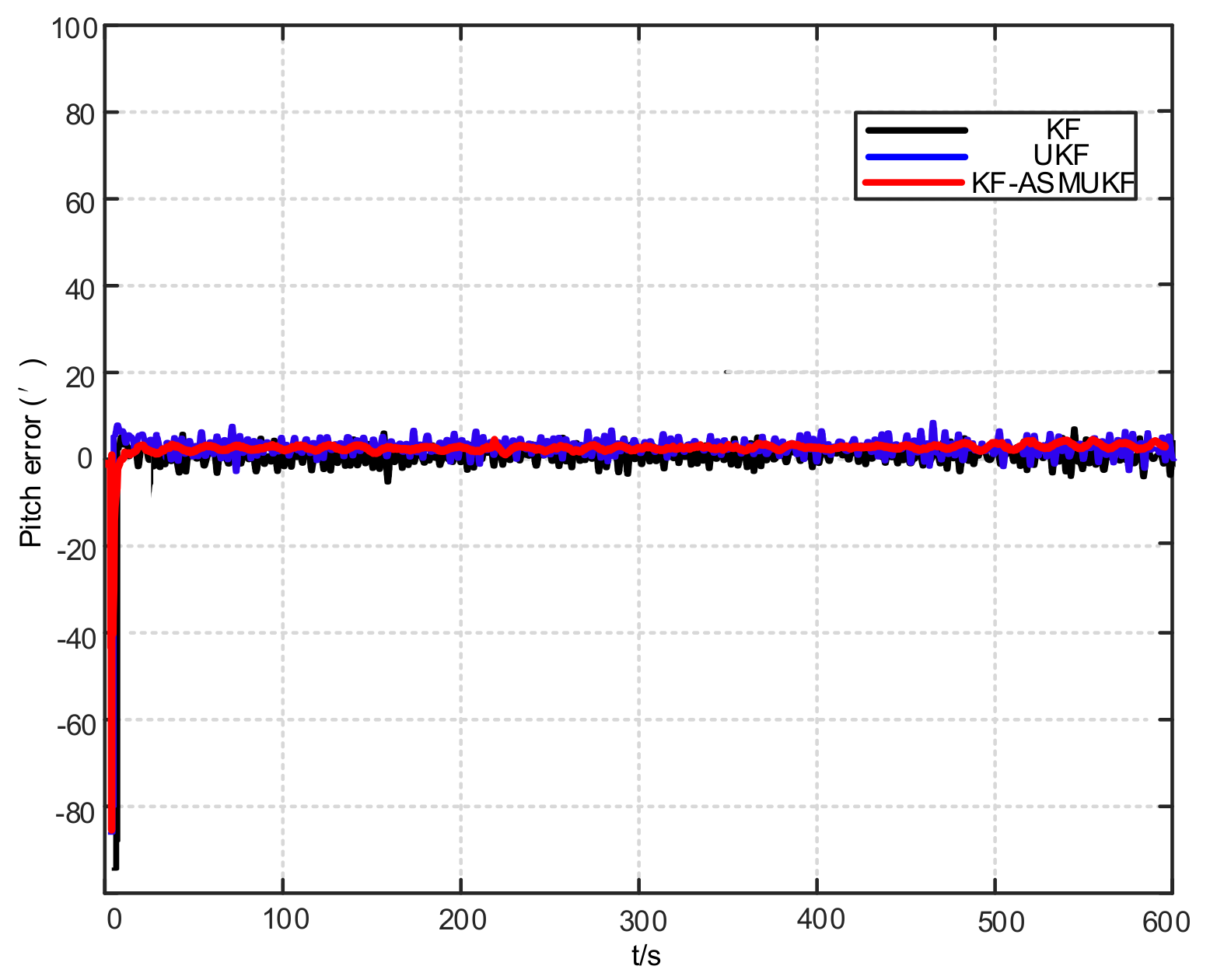
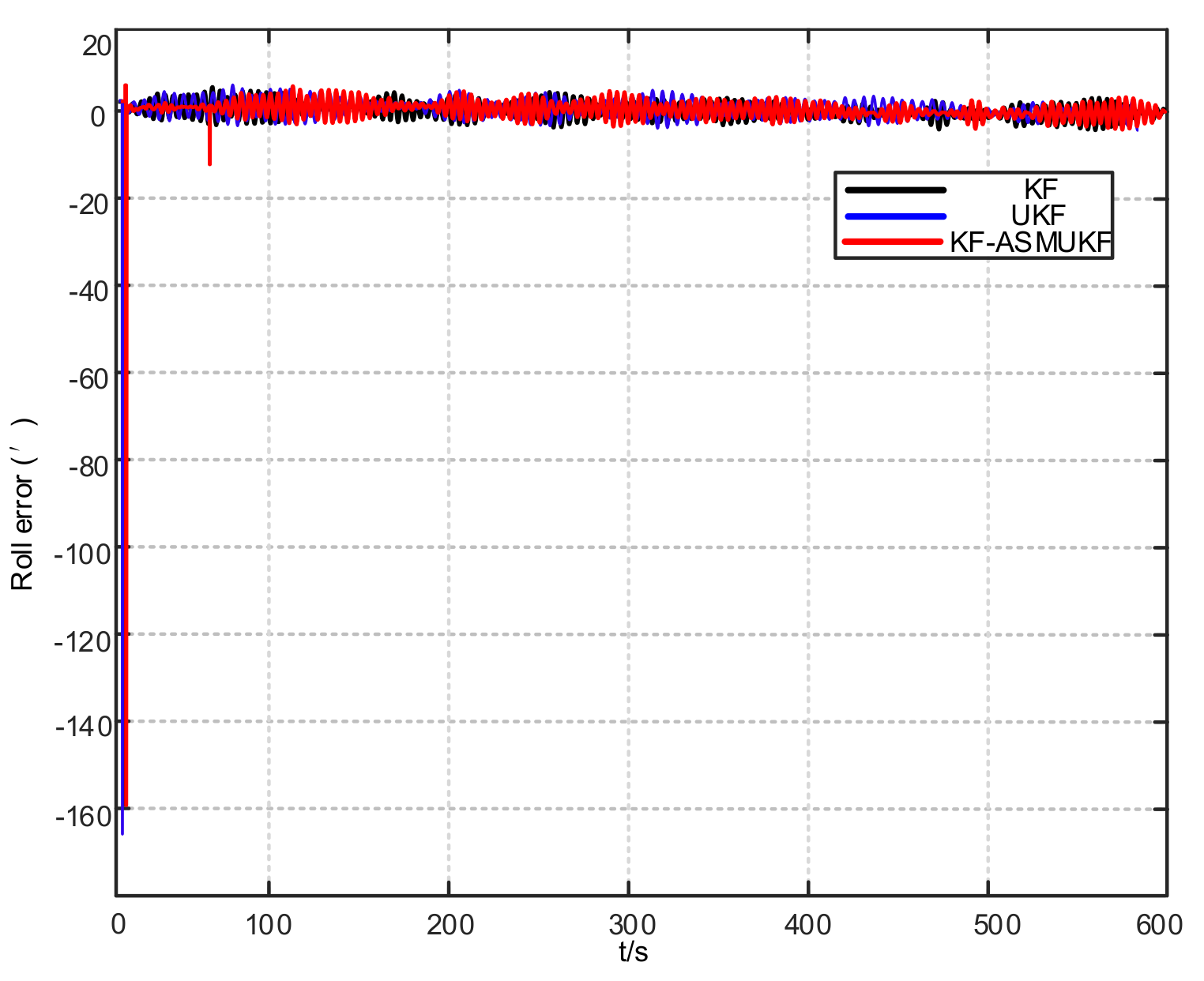
5.2. Mooring Alignment Test on the Sea
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Silva, F.O. Generalized error analysis of analytical coarse alignment formulations for stationary SINS. Aerosp. Sci. Technol. 2018, 79, 500–505. [Google Scholar] [CrossRef]
- Jameian, H.; Safarinejadian, B.; Shasadeghi, M. A robust and fast self-alignment method for strapdown inertial navigation system in rough sea conditions. Ocean. Eng. 2019, 187, 106196.1–106196.14. [Google Scholar] [CrossRef]
- Konovalenko, I.; Kuznetsova, E.; Miller, A.; Miller, B.; Popov, A.; Shepelev, D.; Stepanyan, K. New Approaches to the Integration of Navigation Systems for Autonomous Unmanned Vehicles (UAV). Sensors 2018, 18, 3010. [Google Scholar] [CrossRef] [Green Version]
- Wen, Z.; Yang, G.; Cai, Q.; Sun, Y. Odometer Aided SINS In-motion Alignment Method based on Backtracking Scheme for Large Misalignment Angles. IEEE Access 2019, 1, 7937–7948. [Google Scholar] [CrossRef]
- Abdolkarimi, E.S.; Mosavi M, R. Wavelet-adaptive neural subtractive clustering fuzzy inference system to enhance low-cost and high-speed INS/GPS navigation system. GPS Solut. 2020, 24, 24–38. [Google Scholar] [CrossRef]
- Xiong, H.; Bian, R.; Li, Y.; Du, Z.; Mai, Z. Fault-Tolerant GNSS/SINS/DVL/CNS Integrated Navigation and Positioning Mechanism Based on Adaptive Information Sharing Factors. IEEE Syst. J. 2020, 14, 3744–3754. [Google Scholar] [CrossRef]
- Rafatnia, S.; Nourmohammadi, H.; Keighobadi, J. Fuzzy-adaptive constrained data fusion algorithm for indirect centralized integrated SINS/GNSS navigation system. GPS Solut. 2019, 23, 1–14. [Google Scholar] [CrossRef]
- Giorgi, G.; Teunissen, P.; Gourlay, T.P. Instantaneous Global Navigation Satellite System (GNSS)-Based Attitude Determination for Maritime Applications. IEEE J. Ocean. Eng. 2012, 37, 348–362. [Google Scholar] [CrossRef]
- Wang, B.; Miao, L.; Wang, S.; Shen, J. A constrained LAMBDA method for GPS attitude determination. GPS Solut. 2009, 13, 97–107. [Google Scholar] [CrossRef]
- Eling, C.; Zeimetz, P.; Kuhlmann, H. Development of an instantaneous GNSS/MEMS attitude determination system. GPS Solut. 2013, 17, 129–138. [Google Scholar] [CrossRef]
- Rahimi, H.; Nikkhah, A.A. Improving the speed of initial alignment for marine strapdown inertial navigation systems using heading control signal feedback in extended Kalman filter. Int. J. Adv. Robot. Syst. 2020, 17, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Pei, F.; Zhu, L.; Zhao, J. Initial Self-Alignment for Marine Rotary SINS Using Novel Adaptive Kalman Filter. Methods Appl. 2015, 2015, 320536. [Google Scholar] [CrossRef]
- Rahimi, H.; Nikkhah, A.A. Coarse alignment of marine strapdown inertial navigation system using the location of fitted parametric circle of gravity movement. J. Navig. 2021, 74, 573–593. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B.; Miller, G. On AUV Control with the Aid of Position Estimation Algorithms Based on Acoustic Seabed Sensing and DOA Measurements. Sensors 2019, 19, 5520. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bo, X.; Duan, T.; Wang, L. A Modified Rapid Alignment Method of SINS Based on Measurement Augmentation. Opt. Int. J. Light Electron Opt. 2018, 17, 1–16. [Google Scholar]
- Yoo, T.; Kim, M.; Yoon, S.; Kim, D. Performance Enhancement for Conventional Tightly Coupled INS/DVL Navigation System Using Regeneration of Partial DVL Measurements. J. Sens. 2020, 20, 1–15. [Google Scholar] [CrossRef]
- Shao, H.; Miao, L.; Gao, W.; Shen, J. Ensemble Particle Filter Based on KLD and Its Application to Initial Alignment of SINS in Large Misalignment Angles. IEEE Trans. Ind. Electron. 2018, 12, 1–12. [Google Scholar] [CrossRef]
- Silson, P.M.G. Coarse alignment of a ship’s strapdown inertial attitude reference system using velocity loci. IEEE Trans. Instrum. Meas. 2011, 60, 1930–1941. [Google Scholar] [CrossRef]
- Li, W.; Wang, J.; Lu, L.; Wu, W. A Novel Scheme for DVL-Aided SINS In-Motion Alignment Using UKF Techniques. Sensors 2013, 13, 1046–1063. [Google Scholar] [CrossRef] [Green Version]
- Sun, F.; Lan, H.; Yu, C.; El-Sheimy, N.; Zhou, G.; Cao, T.; Liu, H. A Robust Self-Alignment Method for Ship’s Strapdown INS Under Mooring Conditions. Sensors 2013, 13, 8103–8139. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, G.; Qin, Y.; Fu, Q. A Novel Alignment Method for SINS with Large Misalignment Angles Based on EKF2 and AFIS. Sensors 2020, 20, 5975. [Google Scholar] [CrossRef]
- Wang, D.; Lv, H.; Wu, J. In-flight initial alignment for small UAV MEMS-based navigation via adaptive unscented Kalman filtering approach. Aerosp. Sci. Technol. 2017, 61, 73–84. [Google Scholar] [CrossRef]
- Gao, K.; Ren, S.; Yi, G.; Zhong, J.; Wang, Z. An Improved ACKF/KF Initial Alignment Method for Odometer-Aided Strapdown Inertial Navigation System. Sensors 2018, 18, 3896. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, C.; Qiu, W.; Wei, G.; Fei, Y. An Improved Inertial Frame Alignment Algorithm Based on Horizontal Alignment Information for Marine SINS. Sensors 2015, 15, 2750–2762. [Google Scholar]
- Pei, F.; Yin, S.; Yang, S. Rapid Initial Self-alignment Method Using CMKF for SINS under Marine Mooring Conditions. IEEE Sens. J. 2021, 9, 1223–1236. [Google Scholar]
- Rong, H.; Gao, Y.; Guan, L.; Zhang, Q.; Zhang, F.; Li, N. GAM-Based Mooring Alignment for SINS Based on An Improved CEEMD Denoising Method. Sensors 2019, 19, 3564. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm: ASMUKF filtering algorithm |
| Input:, R, Q |
| Output: |
| (1) Initialization: , , |
| (2) For |
| (3) Calculate Sigma points and the weights of the mean and variance: , , |
| (4) Time update: , , |
| (5) Measurement update: , , |
| (6) Filter update: , , |
| (7) Calculate filter update sampling correction coefficient: , . Return to step (2) |
| (8) Return: |
| (9) End for |
| Pitch Error () | Roll Error () | Heading Error () | ||||
|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | |
| KF | 2.594 | 0.106 | −3.752 | 0.125 | 7.342 | 0.235 |
| UKF | 2.284 | 0.062 | −3.423 | 0.064 | 6.158 | 0.073 |
| KF-ASMUKF | 1.065 | 0.043 | −2.251 | 0.032 | 4.599 | 0.041 |
| Pitch Error () | Roll Error () | Heading Error () | ||||
|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | |
| KF | 5.615 | 0.023 | 5.522 | 0.224 | 12.276 | 0.429 |
| UKF | 4.477 | 0.022 | 4.450 | 0.251 | 10.246 | 0.392 |
| KF-ASMUKF | 3.053 | 0.015 | 3.332 | 0.101 | 8.868 | 0.285 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, P.; Yang, G.; Peng, X. An Alignment Method Based on KF-ASMUKF Hybrid Filtering for Ship’s SINS under Mooring Conditions. Sensors 2021, 21, 7104. https://doi.org/10.3390/s21217104
Yao P, Yang G, Peng X. An Alignment Method Based on KF-ASMUKF Hybrid Filtering for Ship’s SINS under Mooring Conditions. Sensors. 2021; 21(21):7104. https://doi.org/10.3390/s21217104
Chicago/Turabian StyleYao, Pengchao, Gongliu Yang, and Xiafu Peng. 2021. "An Alignment Method Based on KF-ASMUKF Hybrid Filtering for Ship’s SINS under Mooring Conditions" Sensors 21, no. 21: 7104. https://doi.org/10.3390/s21217104
APA StyleYao, P., Yang, G., & Peng, X. (2021). An Alignment Method Based on KF-ASMUKF Hybrid Filtering for Ship’s SINS under Mooring Conditions. Sensors, 21(21), 7104. https://doi.org/10.3390/s21217104