
Improved Resolution and Cost Performance of Low-Cost MEMS Seismic Sensor through Parallel Acquisition

Abstract
:1. Introduction
2. Data Acquisition by Multiple-Sensor and Correlation Average Method
3. Instrument Development
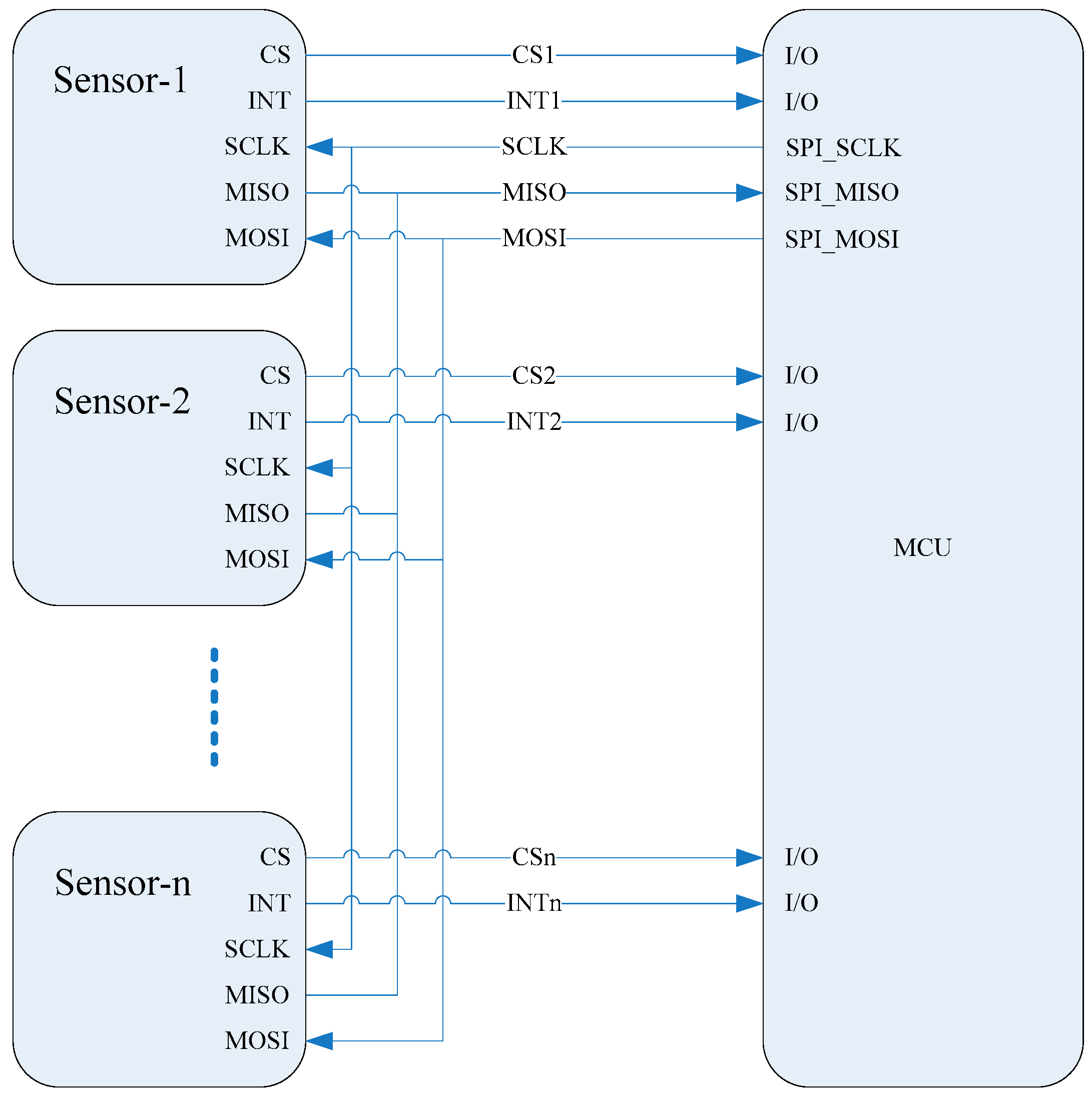
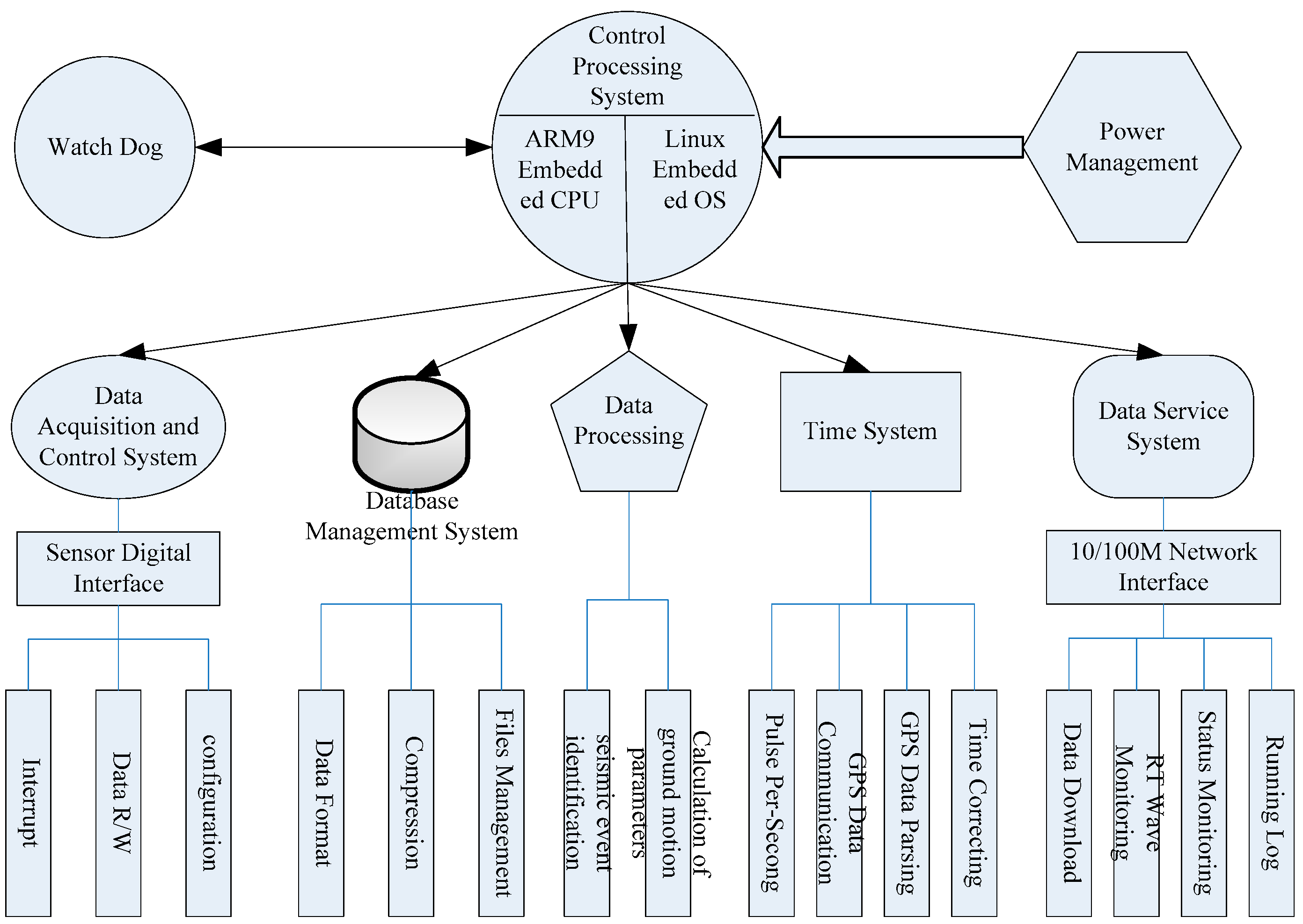
3.1. System Design
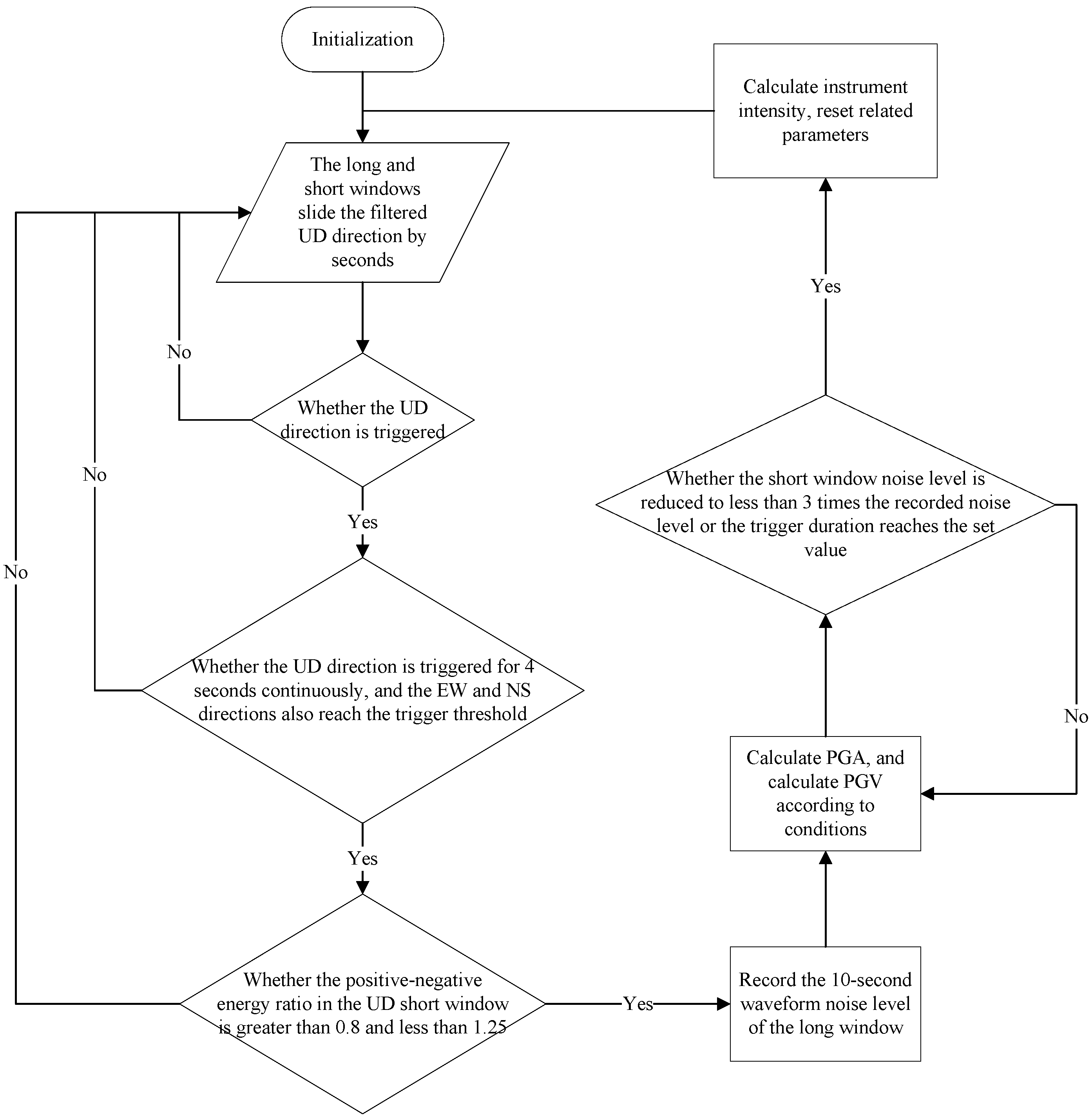
3.2. Acquisition Software
4. Performance Assessment
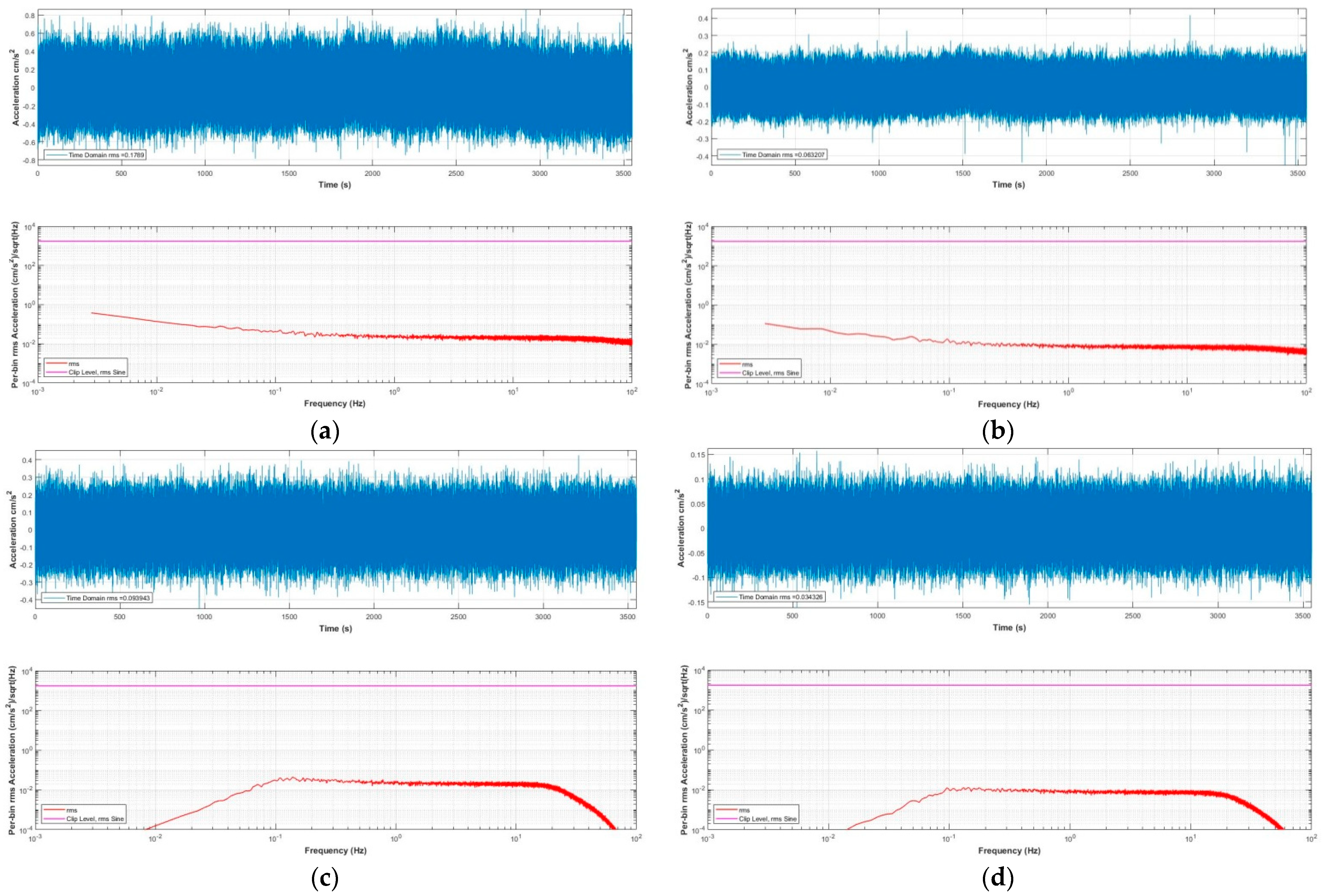
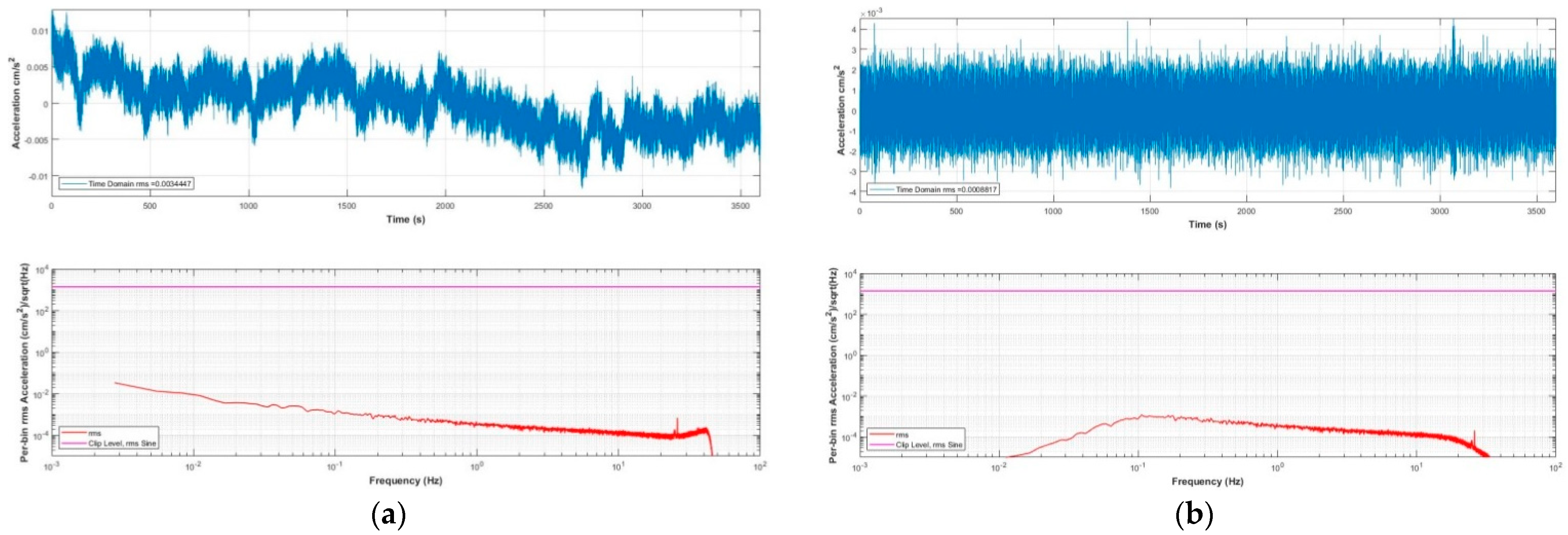
4.1. Self-Noise Test
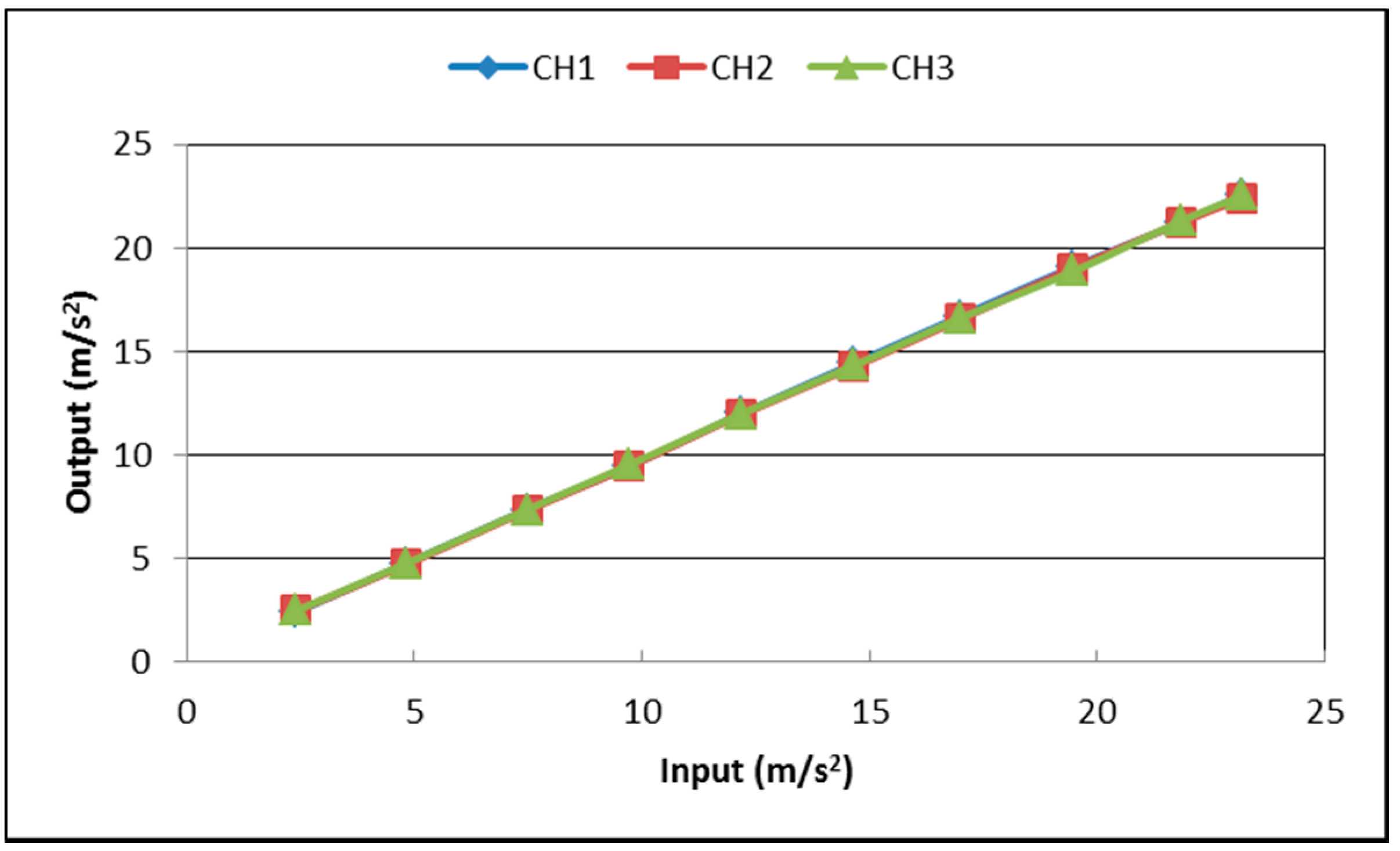
4.2. Performance Test with a Jolt Table
4.3. Performance Indicators
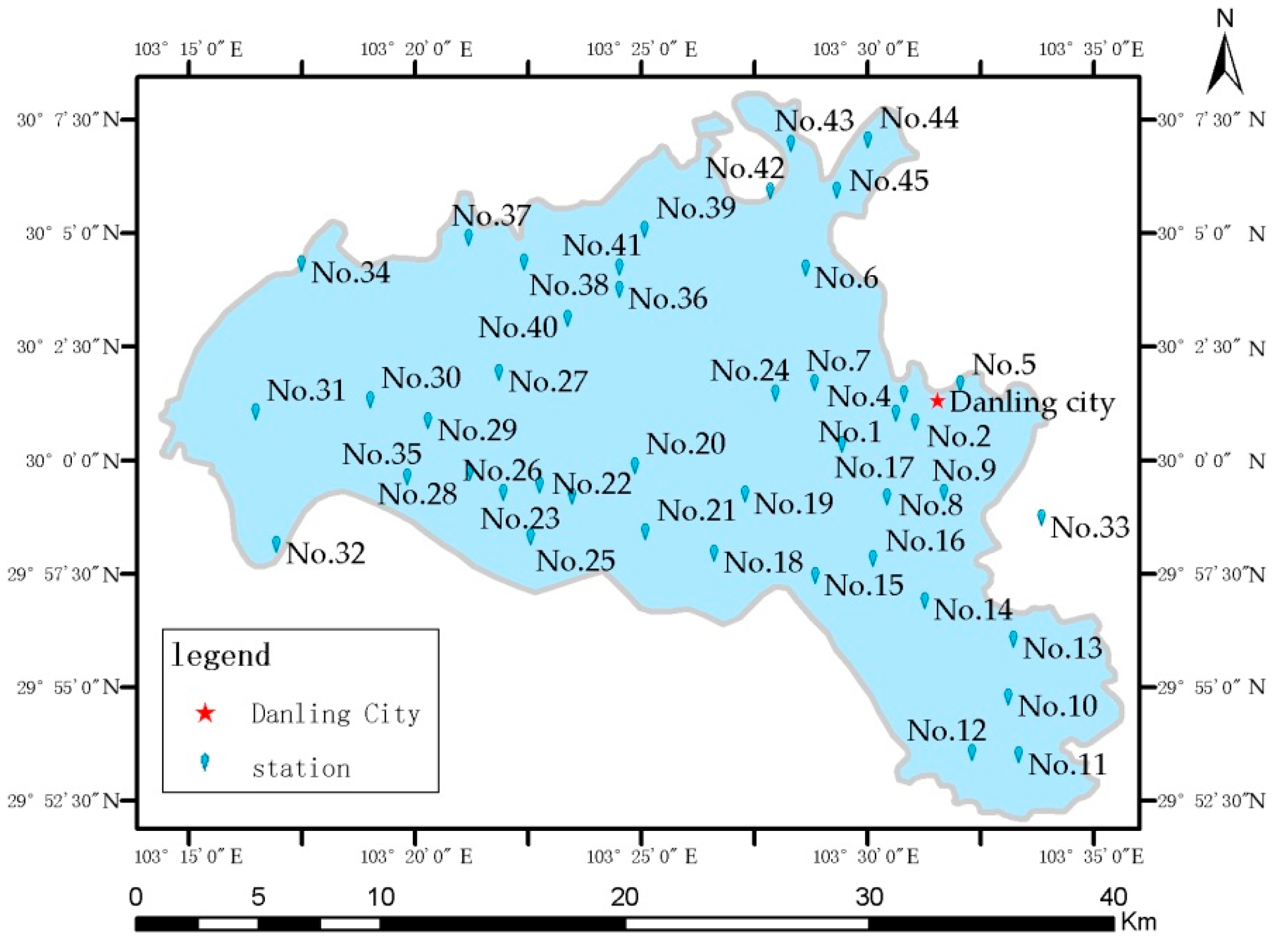
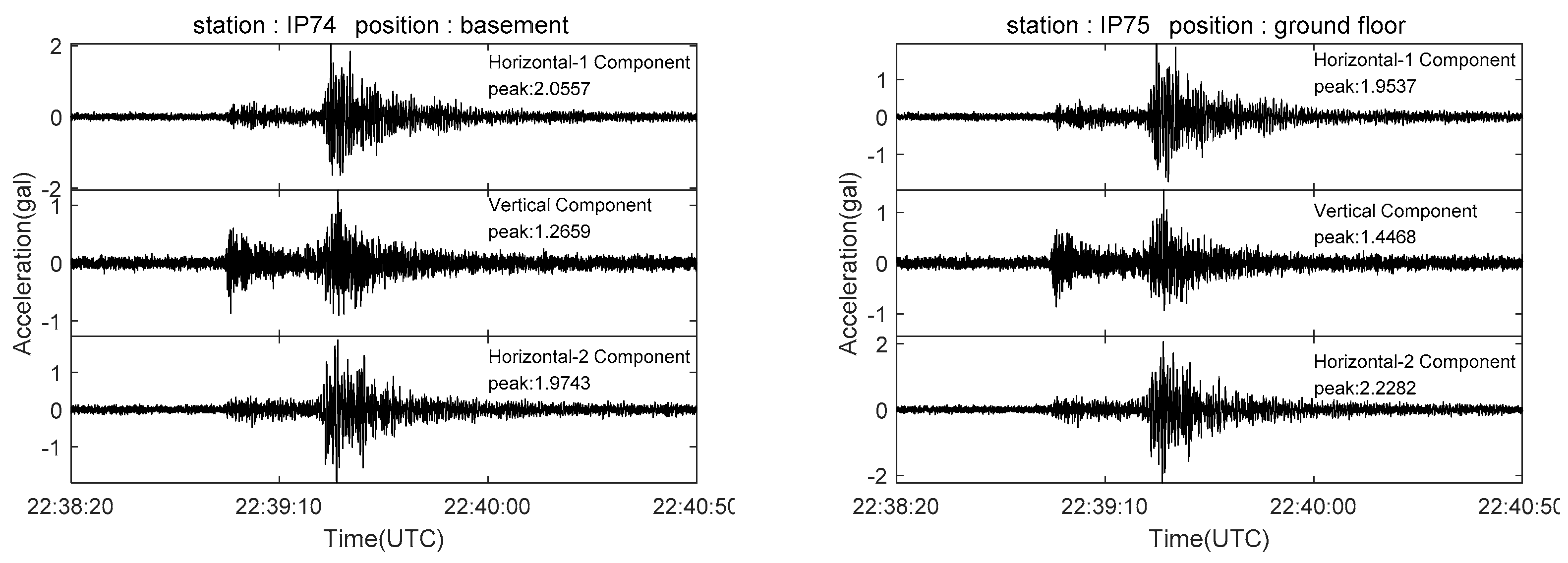
5. Experimental Seismic Monitoring Network
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sabuncu, A. A study of earthquake-induced building detection by object oriented classification approach. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; EGU General Assembly: Vienna, Austria, 2017. [Google Scholar]
- Allen, R.M.; Melgar, D. Earthquake Early Warning: Advances, Scientific Challenges, and Societal Needs. Annu. Rev. Earth Planet. Sci. 2019, 47, 361–388. [Google Scholar] [CrossRef] [Green Version]
- De Groot-Hedlin, C.D.; Hedlin, M.A. A New Automated Approach to Detecting and Locating Seismic Events Using Data from a Large Network. Bull. Seismol. Soc. Am. 2018, 108, 2032–2045. [Google Scholar] [CrossRef]
- Fu, J.; Li, Z.; Meng, H.; Wang, J.; Shan, X. Performance Evaluation of Low-Cost Seismic Sensors for Dense Earthquake Early Warning: 2018–2019 Field Testing in Southwest China. Sensors 2019, 19, 1999. [Google Scholar] [CrossRef] [Green Version]
- Kamigaichi, O. JMA earthquake early warning. J. Jpn. Assoc. Earthq. Eng. 2004, 4, 134–137. [Google Scholar] [CrossRef] [Green Version]
- Fischer, J.; Redlich, J.-P.; Zschau, J.; Milkereit, C.; Picozzi, M.; Fleming, K.; Brumbulli, M.; Lichtblau, B.; Eveslage, I. A wireless mesh sensing network for early warning. J. Netw. Comput. Appl. 2012, 35, 538–547. [Google Scholar] [CrossRef]
- Chung, A.I.; Henson, I.; Allen, R.M. Optimizing earthquake early warning performance: ElarmS-3. Seismol. Res. Lett. 2019, 90, 727–743. [Google Scholar] [CrossRef] [Green Version]
- Ogweno, L.P.; Withers, M.M.; Cramer, C.H. Earthquake Early Warning Feasibility Study for the New Madrid Seismic Zone. Seismol. Res. Lett. 2019, 90, 1377–1392. [Google Scholar] [CrossRef]
- Hoshiba, M.; Aoki, S. Numerical shake prediction for earthquake early warning: Data assimilation, real-time shake mapping, and simulation of wave propagation. Bull. Seismol. Soc. Am. 2015, 105, 1324–1338. [Google Scholar] [CrossRef]
- Peng, C.; Chen, Y.; Chen, Q.; Yang, J.; Wang, H.; Zhu, X.; Xu, Z.; Zheng, Y. A new type of tri-axial accelerometers with high dynamic range MEMS for earthquake early warning. Comput. Geosci. 2017, 100, 179–187. [Google Scholar] [CrossRef]
- Allen, R.M.; Kanamori, H. The Potential for Earthquake Early Warning in Southern California. Science 2003, 300, 786–789. [Google Scholar] [CrossRef] [Green Version]
- Allen, R.M.; Gasparini, P.; Kamigaichi, O.; Bose, M. The Status of Earthquake Early Warning around the World: An Introductory Overview. Seismol. Res. Lett. 2009, 80, 682–693. [Google Scholar] [CrossRef]
- Chen, D.Y.; Hsiao, N.C.; Wu, Y.M. The Earthworm Based Earthquake Alarm Reporting System in Taiwan. Bull. Seismol. Soc. Am. 2015, 105, 568–579. [Google Scholar] [CrossRef]
- Erdik, M.; Fahjan, Y.; Ozel, O.; Alcik, H.; Mert, A.; Gul, M. Istanbul Earthquake Rapid Response and the Early Warning System. Bull. Earthq. Eng. 2003, 1, 157–163. [Google Scholar] [CrossRef]
- Espinosa-Aranda, J.; Cuellar, A.; Garcia, A.; Ibarrola, G.; Islas, R.; Maldonado, S.; Rodriguez, F. Evolution of the Mexican seismic alert system (SASMEX). Seismol. Res. Lett. 2009, 80, 694–706. [Google Scholar] [CrossRef] [Green Version]
- Horiuchi, S.; Negishi, H.; Abe, K.; Kamimura, A.; Fujinawa, Y. An Automatic Processing System for Broadcasting Earthquake Alarms. Bull. Seismol. Soc. Am. 2005, 95, 708–718. [Google Scholar] [CrossRef]
- Hoshiba, M.; Kamigaichi, O.; Saito, M.; Tsukada, S.Y.; Hamada, N. Earthquake early warning starts nationwide in Japan. EOS Trans. Am. Geophys. Union 2008, 89, 73–74. [Google Scholar] [CrossRef]
- Ionescu, C.; Böse, M.; Wenzel, F.; Marmureanu, A.; Grigore, A.; Marmureanu, G. An Early Warning System for Deep Vrancea (Romania) Earthquakes. In Earthquake Early Warning Systems; Springer: Berlin/Heidelberg, Germany, 2007; pp. 343–349. [Google Scholar]
- Serdar Kuyuk, H.; Allen, R.M.; Brown, H.; Hellweg, M.; Henson, I.; Neuhauser, D. Designing a Network-Based Earthquake Early Warning Algorithm for California: ElarmS-2. Bull. Seismol. Soc. Am. 2013, 104, 162–173. [Google Scholar] [CrossRef]
- Wurman, G.; Allen, R.M.; Lombard, P. Toward earthquake early warning in northern California. J. Geophys. Res. 2007, 112, B08311. [Google Scholar] [CrossRef]
- Wu, Y.-M.; Zhao, L. Magnitude estimation using the first three seconds P-wave amplitude in earthquake early warning. Geophys. Res. Lett. 2006, 33, L16312. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.-M.; Teng, T.-l. A Virtual Subnetwork Approach to Earthquake Early Warning. Bull. Seismol. Soc. Am. 2002, 92, 2008–2018. [Google Scholar] [CrossRef] [Green Version]
- Alcik, H.; Ozel, O.; Apaydin, N.; Erdik, M. A study on warning algorithms for Istanbul earthquake early warning system. Geophys. Res. Lett 2009, 36, L00B05. [Google Scholar] [CrossRef] [Green Version]
- Peng, H.; Wu, Z.; Wu, Y.; Yu, S.; Zhang, D.; Huang, W. Developing a Prototype Earthquake Early Warning System in the Beijing Capital Region. Seismol. Res. Lett. 2011, 82, 394–403. [Google Scholar] [CrossRef]
- Petit, N.R.; Puyané, Y.C.; Salvador, J.A.J.; Suriñach, X.G.; Vidal, T.S. Development of an Earthquake Early Warning System Based on Earthworm: Application to Southwest Iberia. Bull. Seismol. Soc. Am. 2016, 106, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Jin, X.; Wei, Y.; Li, J.; Kang, L.; Wang, S.; Huang, L.; Yu, P. An Earthquake Early Warning System in Fujian, China. Bull. Seismol. Soc. Am. 2016, 106, 755–765. [Google Scholar] [CrossRef]
- Zollo, A.; Amoroso, O.; Lancieri, M.; Wu, Y.-M.; Kanamori, H. A threshold-based earthquake early warning using dense accelerometer networks. Geophys. J. Int. 2010, 183, 963–974. [Google Scholar] [CrossRef] [Green Version]
- Nof, R.N.; Lior, I.; Kurzon, I. Earthquake Early Warning System in Israel—Towards an Operational Stage. Front. Earth Sci. 2021, 9, 684421. [Google Scholar] [CrossRef]
- Nakamura, Y. On the Urgent Earthquake Detection and Alarm System (UrEDAS). In Proceedings of the 9th World Conference on Earthquake Engineering, Tokyo, Japan, 2–9 August 1988. [Google Scholar]
- Retailleau, L.; Shapiro, N.M.; Guilbert, J.; Campillo, M.; Roux, P. Detecting and locating seismic events with using USArray as a large antenna. Adv. Geosci. 2015, 40, 27–30. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Jin, X.; Chen, X.; Ma, Q. Rapid reporting of peak strong motion and seismic intensity. Earthq. Eng. Eng. Vib. 2002, 22, 1–7. [Google Scholar]
- Peng, C.; Jiang, P.; Chen, Q.; Ma, Q.; Yang, J. Performance Evaluation of a Dense MEMS-Based Seismic Sensor Array Deployed in the Sichuan-Yunnan Border Region for Earthquake Early Warning. Micromachines 2019, 10, 735. [Google Scholar] [CrossRef] [Green Version]
- Holland, A. Earthquake Data Recorded by the MEMS Accelerometer: Field Testing in Idaho. Seismol. Res. Lett. 2003, 74, 20–26. [Google Scholar] [CrossRef]
- Evans, J.R.; Allen, R.M.; Chung, A.I.; Cochran, E.S.; Guy, R.; Hellweg, M.; Lawrence, J.F. Performance of Several Low-Cost Accelerometers. Seismol. Res. Lett. 2014, 85, 147–158. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.X.; Gao, M.T.; Teng, Y.T.; Wang, X.Z.; Li, C.H.; Lu, H.Y.; Zhang, Y. Design of ground motion parameters rapid report device. Chin. J. Geophys. 2015, 58, 1024–1034. [Google Scholar]
- Allen, R.V. Automatic earthquake recognition and timing from single traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Mborah, C.; Ge, M. Enhancing manual P-phase arrival detection and automatic onset time picking in a noisy microseismic data in underground mines. Int. J. Min. Sci. Technol. 2018, 28, 691–699. [Google Scholar] [CrossRef]
- Iten, M.; Puzrin, A.M.; Schmid, A. Landslide monitoring using a road-embedded optical fiber sensor. Proc. SPIE Int. Soc. Opt. Eng. 2008, 6933, 693315. [Google Scholar]
- De Capua, C.; Lugarà, M.; Morello, R. A Smart-Sensor Based on MEMS Technology for Monitoring Landslides. In Sensors; Lecture Notes in Electrical Engineering; Baldini, F., D’Amico, A., Di Natale, C., Siciliano, P., Seeber, R., De Stefano, L., Bizzarri, R., Andò, B., Eds.; Springer: New York, NY, USA, 2014; Volume 162. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural health monitoring with piezoelectric wafer active sensors. Br. J. Ophthalmol. 2014, 58, 438–454. [Google Scholar]
- Jo, H.; Rice, J.A.; Spencer, B.F., Jr.; Nagayama, T. In Development of high-sensitivity accelerometer board for structural health monitoring. Proc. SPIE 2010, 7467, 764706. [Google Scholar]
- Shaik, A.V.S.; Chow, R.; Mechitov, K.; Fu, Y.; Spencer, B.F. Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors 2020, 20, 4169. [Google Scholar]
- Lin, J.-F.; Li, X.-Y.; Wang, J.; Wang, L.-X.; Hu, X.-X.; Liu, J.-X. Study of Building Safety Monitoring by Using Cost-Effective MEMS Accelerometers for Rapid After-Earthquake Assessment with Missing Data. Sensors 2021, 21, 7327. [Google Scholar] [CrossRef]
- Nof, R.N.; Chung, A.I.; Rademacher, H.; Dengler, L.; Allen, R.M. MEMS Accelerometer Mini-Array (MAMA): A Low-Cost Implementation for Earthquake Early Warning Enhancement. Earthq. Spectra 2019, 35, 21–38. [Google Scholar] [CrossRef]
- Neu, T.; Christiansen, G. Multiple A/Ds versus a Single One: Pushing High-Speed A/D Converter SNR beyond the State of the Art. EETimes. 2007. Available online: https://www.eetimes.com/multiple-a-ds-versus-a-single-one-pushing-high-speed-a-d-converter-snr-beyond-the-state-of-the-art/ (accessed on 24 November 2021).
- Akram, J.; Ovcharenko, O.; Peter, D. A robust neural network-based approach for microseismic event detection. In Proceedings of the 2017 SEG International Exposition and Annual Meeting, Exhibit Hall C/D, Houston, TX, USA, 24–29 September 2017. [Google Scholar]
- Allen, R. Automatic phase pickers: Their present use and future prospects. Bull. Seismol. Soc. Am. 1982, 72, S225–S242. [Google Scholar] [CrossRef]
- Jing-Song, L.I.U.; Yun, W.; Zhen-Xing, Y.A.O. On micro-seismic first arrival identification: A case study. Chin. J. Geophys. 2013, 56, 1660–1666. [Google Scholar]
- Qiang, M.A.; Xing, J.I.N.; Shan-You, L.I.; Fei-Wen, C.; Shi-Rong, L.; Yong-Xiang, W.E.I. Automatic P-arrival detection for earthquake early warning. Chin. J. Geophys. 2013, 56, 2313–2321. [Google Scholar]
- Song, F.; Kuleli, H.S.; Toksöz, M.N.; Ay, E.; Zhang, H. An improved method for hydrofracture-induced microseismic event detection and phase picking. Geophysics 2010, 75, A47–A52. [Google Scholar] [CrossRef] [Green Version]
- D’Emilia, G.; Gaspari, A.; Mazzoleni, F.; Natale, E.; Schiavi, A. Calibration of tri-axial MEMS accelerometers in the low-frequency range—Part 2: Uncertainty assessment. J. Sens. Sens. Syst. 2018, 7, 403–410. [Google Scholar] [CrossRef] [Green Version]
- 2017. Available online: https://www.stmicroelectronics.com.cn/en/mems-and-sensors/lis3dhh.html (accessed on 24 November 2021).
- 2015. Available online: https://www.cea.gov.cn/cea/zwgk/xxbz/dzxybz/1446702/2017102415274724702.pdf (accessed on 24 November 2021).
- Wang, F.; Kang, X.; Luo, G.; Yan, T.; Liu, Y. Preliminary analysis of the structural seismic response observation data in Beijing recorded in Guye earthquake with magnitude 5.1. Prog. Earthq. Sci. 2020, 50, 20–25. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test frequency (Hz) | 1 | 5 | 10 | 20 | 30 | 40 | 60 | 80 | |
| Peak input value of the jolt table (m/s2) | 4.03 | 7.05 | 7.14 | 7.07 | 7.07 | 7.07 | 7.07 | 7.07 | |
| CH1 | Sensor output(m/s2) | 4.11 | 7.07 | 7.09 | 6.97 | 6.88 | 6.67 | 6.31 | 5.67 |
| 20log (output/input) (dB) | 0.17 | 0.02 | −0.06 | −0.13 | −0.23 | −0.51 | −0.99 | −1.91 | |
| CH2 | Sensor output (m/s2) | 4.12 | 7.05 | 7.08 | 6.95 | 6.85 | 6.70 | 6.30 | 5.57 |
| 20log (output/input) (dB) | 0.20 | 0.00 | −0.07 | −0.14 | −0.28 | −0.47 | −1.00 | −2.08 | |
| CH3 | Sensor output (m/s2) | 4.13 | 7.04 | 7.07 | 7.00 | 6.92 | 6.64 | 6.42 | 5.81 |
| 20log (output/input) (dB) | 0.22 | −0.01 | −0.09 | −0.09 | −0.18 | −0.54 | −0.84 | −1.70 | |
| Technical Indicators or Functional Indicators | Technical Requirements of China Earthquake Administration’s Seismic Intensity Meter into the Network | Indicators Reached by the Developed Instrument |
|---|---|---|
| Number of channels | 3 | 3 |
| Sampling rate | 50 SPS, 100 SPS, 200 SPS | 50 SPS, 100 SPS, 200 SPS |
| Full scale measurement range | ±2 g (−19.6 m/s2–19.6 m/s2) | ±2.5 g (−24.5 m/s2~24.5 m/s2) |
| Self-noise RMS | 0.1 mg @0.1–20 Hz | About 0.03 mg @0.1–20 Hz |
| Linearity | Better than 1% | Better than 0.47% |
| Measuring error | Less than 5% (0.1–20 Hz) | Better than 3.4% @10 Hz |
| Frequency response | Low cut-off frequency: ≤0.01 Hz High cut-off frequency: ≥40 Hz (−3 dB, at a sampling rate of 100 Hz or 200 Hz) High cut-off frequency: ≥20 Hz (−3 dB, at a sampling rate of 50 Hz) | DC ~80 Hz (@200 SPS) |
| Dynamic range | >60 dB (0.1–20 Hz, when the observed data is used only for seismic intensity measurement) >80 dB (0.1–20 Hz, when the observed data is used for both seismic intensity measurement and earthquake early warning) | >90 dB (0.1–20 Hz) |
| GPS time correction | Equipped with the function of GNSS time correction | |
| Monitoring of real-time data waveform | Equipped with the function of monitoring real-time data waveform | |
| Downloading of remote data file FTP | Equipped with the function of downloading remote data file FTP | |
| Continuous waveform file storage | Equipped with the function of storing continuous waveform files | |
| Event waveform file storage | Equipped with the function of storing event waveform files | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.-X.; Wang, X.-Z.; Chen, B.; Li, C.-H.; Tang, Y.-X.; Shen, X.-Y.; Zhong, Y.; Chen, Z.-L.; Teng, Y.-T. Improved Resolution and Cost Performance of Low-Cost MEMS Seismic Sensor through Parallel Acquisition. Sensors 2021, 21, 7970. https://doi.org/10.3390/s21237970
Hu X-X, Wang X-Z, Chen B, Li C-H, Tang Y-X, Shen X-Y, Zhong Y, Chen Z-L, Teng Y-T. Improved Resolution and Cost Performance of Low-Cost MEMS Seismic Sensor through Parallel Acquisition. Sensors. 2021; 21(23):7970. https://doi.org/10.3390/s21237970
Chicago/Turabian StyleHu, Xing-Xing, Xi-Zhen Wang, Bo Chen, Cai-Hua Li, Yi-Xiang Tang, Xiao-Yu Shen, Yuan Zhong, Zhuo-Lin Chen, and Yun-Tian Teng. 2021. "Improved Resolution and Cost Performance of Low-Cost MEMS Seismic Sensor through Parallel Acquisition" Sensors 21, no. 23: 7970. https://doi.org/10.3390/s21237970
APA StyleHu, X.-X., Wang, X.-Z., Chen, B., Li, C.-H., Tang, Y.-X., Shen, X.-Y., Zhong, Y., Chen, Z.-L., & Teng, Y.-T. (2021). Improved Resolution and Cost Performance of Low-Cost MEMS Seismic Sensor through Parallel Acquisition. Sensors, 21(23), 7970. https://doi.org/10.3390/s21237970