
Bendductor—Transformer Steel Magnetomechanical Force Sensor


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
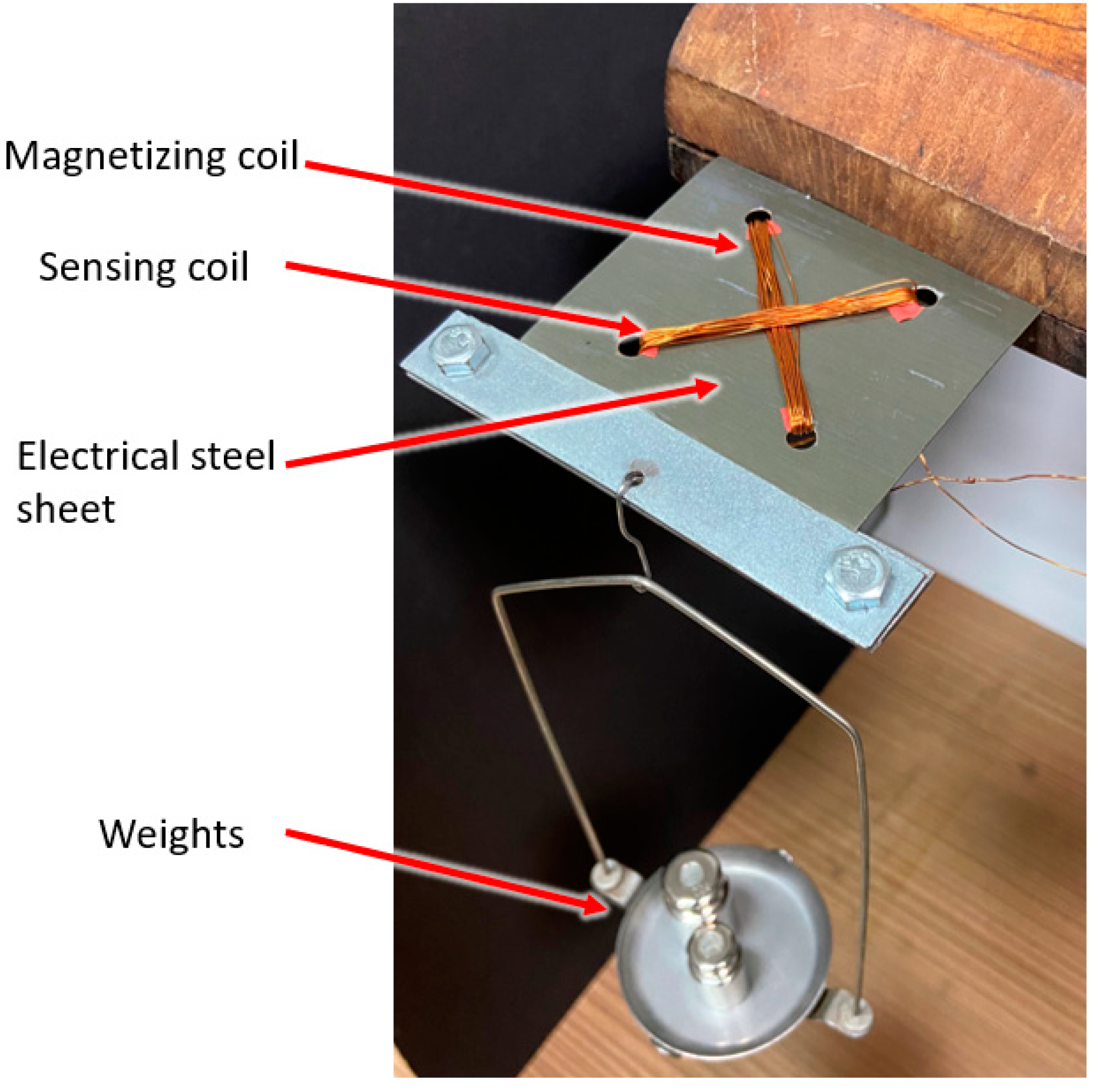
2. Materials and Methods
- LakeShore Model 480 Fluxmeter (5) set to measure magnetic flux density in sensor core;
- F2-16 phase difference meter (11) comparing input and output signals in the transducer;
- PMZ-12 nonlinear distortion meter measuring THD (total harmonic distortion) of the output signal;
- Bruel and KJAER type 2034 dual-channel spectrum analyzer used for measurements of signal harmonics.
3. Results
3.1. Power Supply Selection
3.2. THD Measurement
3.3. Phase Shift Measurement
3.4. Magnetic Flux Measurement
3.5. Harmonics Measurement
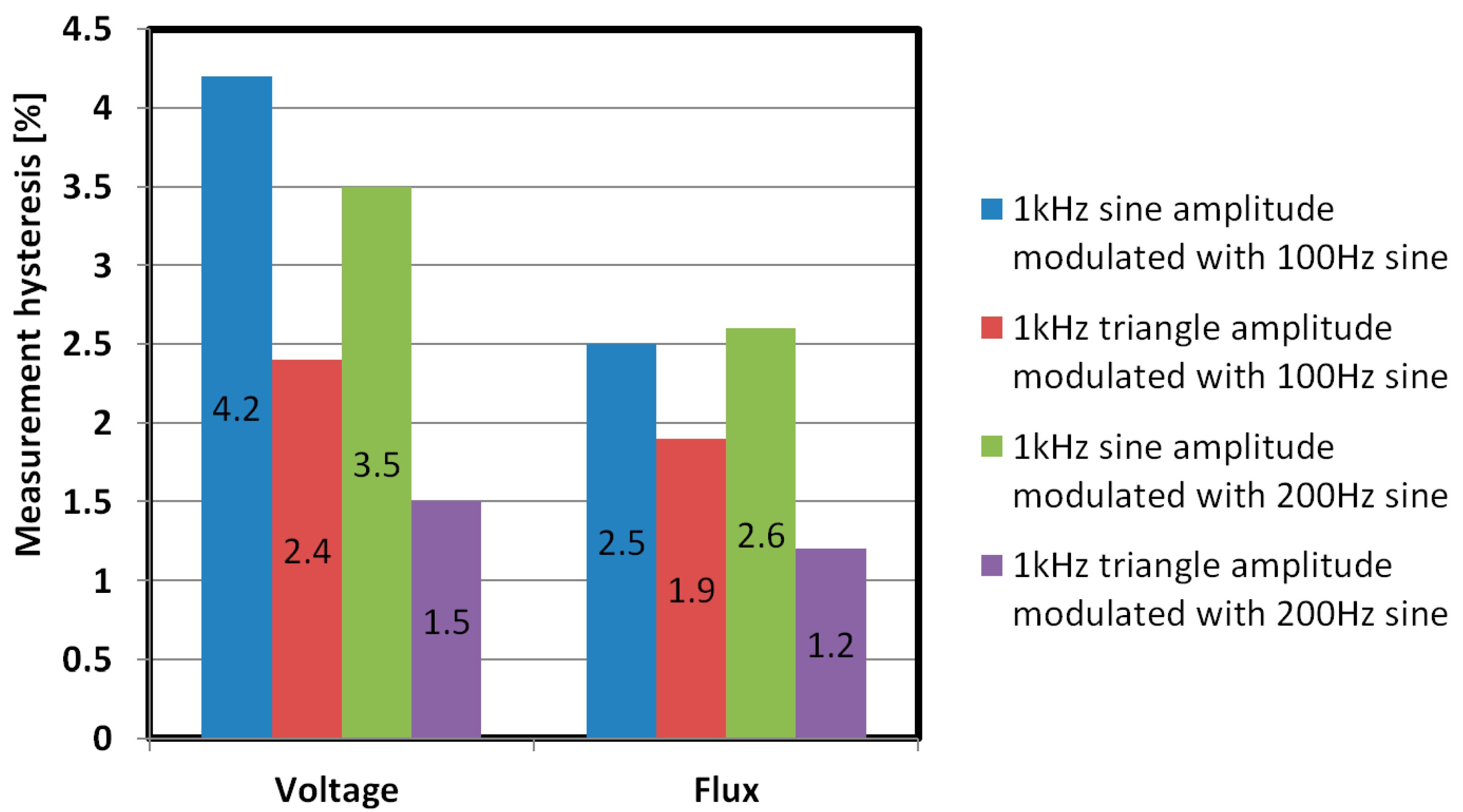
3.6. Selection of the Frequency and Shape of the Voltage for the Magnetizing Current
- 1 kHz sine modulated with 100 Hz sine—AM,
- 1 kHz sine modulated with 200 Hz sine—AM,
- 1 kHz triangle modulated with 100 Hz sine—AM,
- 1 kHz triangle modulated with 200 Hz sine—AM.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stefanescu, D.M. Handbook of Force Transducers: Principles and Components; Springer Science & Business Media: Berlin, Germany, 2011; ISBN 3642182968. [Google Scholar]
- Bieńkowski, A.; Szewczyk, R. The possibility of utilizing the high permeability magnetic materials in construction of magne-toelastic stress and force sensors. Sens. Actuators A Phys. 2004, 113, 270–276. [Google Scholar] [CrossRef]
- Dahle, O. The pressductor and the torductor—Two heavy-duty transducers based on magnetic stress sensitivity. IEEE Trans. Commun. Electron. 1964, 83, 752–758. [Google Scholar] [CrossRef]
- Wang, M.L.; Chen, Z.L.; Koontz, S.S.; Lloyd, G.M. Magnetoelastic permeability measurement for stress monitoring in steel tendons and cables. In Nondestructive Evaluation of Highways, Utilities, and Pipelines IV; SPIE: Bellingham, WA, USA, 2000; Volume 3995, pp. 492–501. [Google Scholar]
- Flynn, F. Pressductor. Stud. Q. J. 1966, 36, 125. [Google Scholar] [CrossRef]
- Szewczyk, R.; Nowicki, M.; Ostaszewska-Liżewska, A.; Bieńkowski, A.; Nowak, P.; Malinen, M. Accuracy of frame-shaped samples based measurements of magnetoelastic characteristics of soft magnetic materials. Measurements 2020, 162, 107899. [Google Scholar] [CrossRef]
- Mohri, K.; Sudoh, E. Sensitive force transducers using a single amorphous core multivibrator bridge. IEEE Trans. Magn. 1979, 15, 1806–1808. [Google Scholar] [CrossRef]
- Bieńkowski, A.; Szewczyk, R. New Possibility of Utilizing Amorphous Ring Cores as Stress Sensor. Phys. Status Solidi 2002, 189, 787–790. [Google Scholar] [CrossRef]
- Švec, P.; Szewczyk, R.; Salach, J.; Jackiewicz, D.; Bieńkowski, A.; Hoško, J. Magnetoelastic Properties of Selected Amorphous Systems Tailored by Thermomagnetic Treatment. J. Electr. Eng. 2014, 65, 259–261. [Google Scholar] [CrossRef] [Green Version]
- Tejedor, M.; Hernando, B.; Sanchez, M.L.; Prida, V.M.; Vázquez, M. The torsional dependence of the magneto-impedance effect in current-annealed Co-rich amorphous wires. J. Phys. D Appl. Phys. 1998, 31, 3331–3336. [Google Scholar] [CrossRef]
- Oess, N.P.; Weisse, B.; Nelson, B.J. Magnetoelastic Strain Sensor for Optimized Assessment of Bone Fracture Fixation. IEEE Sens. J. 2009, 9, 961–968. [Google Scholar] [CrossRef] [Green Version]
- Bieńkowski, A.; Szewczyk, R.; Salach, J. Industrial Application of Magnetoelastic Force and Torque Sensors. Acta Phys. Pol. A 2010, 118, 1008–1009. [Google Scholar] [CrossRef]
- Bydzovsky, J.; Kollár, M.; Svec, P.; Kraus, L.; Jancárik, V. Magnetoelastic properties of CoFeCrSiB amorphous ribbons—A possibility of their application. J. Electr. Eng.–Bratisl. 2001, 52, 205–209. [Google Scholar]
- Ferenc, J.; Kowalczyk, M.; Cieślak, G.; Kulik, T. Magnetostrictive Iron-Based Bulk Metallic Glasses for Force Sensors. IEEE Trans. Magn. 2014, 50, 1–3. [Google Scholar] [CrossRef]
- Moran, T.J.; Ursetta, F. Magnetoelastic Sensor. U.S. Patent US20150204737A1, 23 July 2015. [Google Scholar]
- ABB Load Monitoring System Helps Extend Life of London’s Landmark Tower Bridge. Available online: https://new.abb.com/products/measurement-products/measurement-made-easy/load-monitoring-system-helps-extend-life-of-london-s-landmark-tower-bridge (accessed on 4 November 2018).
- Szewczyk, R.; Bieńkowski, A. Magnetoelastic Villari effect in high-permeability Mn–Zn ferrites and modeling of this effect. J. Magn. Magn. Mater. 2003, 254, 284–286. [Google Scholar] [CrossRef]
- Xia, Z.; Kang, Y.; Wang, Q. Developments in the production of grain-oriented electrical steel. J. Magn. Magn. Mater. 2008, 320, 3229–3233. [Google Scholar] [CrossRef]
- Matsumura, K.; Fukuda, B. Recent developments of non-oriented electrical steel sheets. IEEE Trans. Magn. 1984, 20, 1533–1538. [Google Scholar] [CrossRef]
- Petrovic, D.S. Non-oriented electrical steel sheets. Mater. Tehnol. 2010, 44, 317–325. [Google Scholar]
- Yabumoto, M.; Kaido, C.; Wakisaka, T.; Kubota, T.; Suzuki, N. Electrical Steel Sheet for Traction Motor of Hybrid/Electric Vehicles; Nippon Steel Technical Report; Nippon Steel: Tokyo, Japan, 2003. [Google Scholar]
- Oda, Y.; Kohno, M.; Honda, A. Recent development of non-oriented electrical steel sheet for automobile electrical devices. J. Magn. Magn. Mater. 2008, 320, 2430–2435. [Google Scholar] [CrossRef]
- Tanaka, I.; Nitomi, H.; Imanishi, K.; Okamura, K.; Yashiki, H. Application of High-Strength Nonoriented Electrical Steel to Interior Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2012, 49, 2997–3001. [Google Scholar] [CrossRef]
- Leuning, N.; Steentjes, S.; Hameyer, K. Effect of magnetic anisotropy on Villari Effect in non-oriented FeSi electrical steel. Int. J. Appl. Electromagn. Mech. 2017, 55, 23–31. [Google Scholar] [CrossRef]
- Steentjes, S.; Rasilo, P.; Belahcen, A.; Kouhia, R.; Hameyer, K. Anisotropic model for Villari effect in non-oriented electrical steel sheets. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016; IEEE: Piscataway, NJ, USA, 2016; p. 1. [Google Scholar]
- Senda, K.; Fujita, A.; Honda, A.; Kuroki, N.; Yagi, M. Magnetic Properties and Domain Structure of Non-oriented Electrical Steel Under Stress. IEEJ Trans. Fundam. Mater. 2011, 131, 884–890. [Google Scholar] [CrossRef]
- Aydin, U.; Rasilo, P.; Martin, F.; Singh, D.; Daniel, L.; Belahcen, A.; Rekik, M.; Hubert, O.; Kouhia, R.; Arkkio, A. Magneto-mechanical modeling of electrical steel sheets. J. Magn. Magn. Mater. 2017, 439, 82–90. [Google Scholar] [CrossRef]
- Mazgaj, W.; Warzecha, A. Influence of electrical steel sheet textures on their magnetization curves. Arch. Electr. Eng. 2013, 62, 425–437. [Google Scholar] [CrossRef] [Green Version]
- Marra, K.M.; Alvarenga, E.A.; Buono, V.T.L. Magnetic aging anisotropy of a semi-processed non-oriented electrical steel. Mater. Sci. Eng. A 2005, 390, 423–426. [Google Scholar] [CrossRef]
- Nowicki, M. Tensductor—Amorphous Alloy Based Magnetoelastic Tensile Force Sensor. Sensors 2018, 18, 4420. [Google Scholar] [CrossRef] [PubMed] [Green Version]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grenda, P.; Kutyła, M.; Nowicki, M.; Charubin, T. Bendductor—Transformer Steel Magnetomechanical Force Sensor. Sensors 2021, 21, 8250. https://doi.org/10.3390/s21248250
Grenda P, Kutyła M, Nowicki M, Charubin T. Bendductor—Transformer Steel Magnetomechanical Force Sensor. Sensors. 2021; 21(24):8250. https://doi.org/10.3390/s21248250
Chicago/Turabian StyleGrenda, Przemysław, Monika Kutyła, Michał Nowicki, and Tomasz Charubin. 2021. "Bendductor—Transformer Steel Magnetomechanical Force Sensor" Sensors 21, no. 24: 8250. https://doi.org/10.3390/s21248250