
Detection Threshold Estimates for InSAR Time Series: A Simulation of Tropospheric Delay Approach


Abstract
:1. Introduction
2. Tropospheric Phase Delay
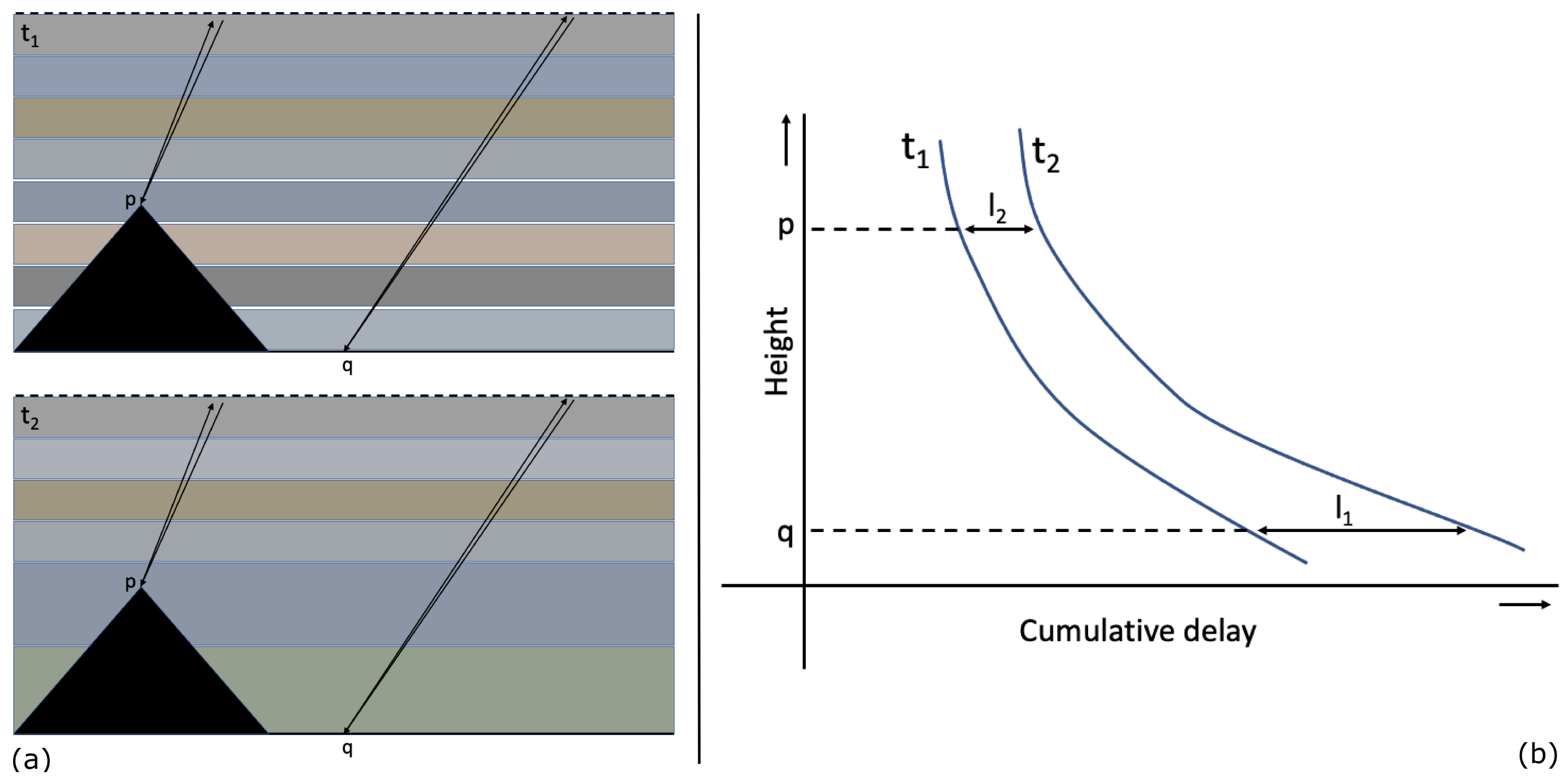
2.1. Vertical Stratification
2.2. Turbulence Mixing
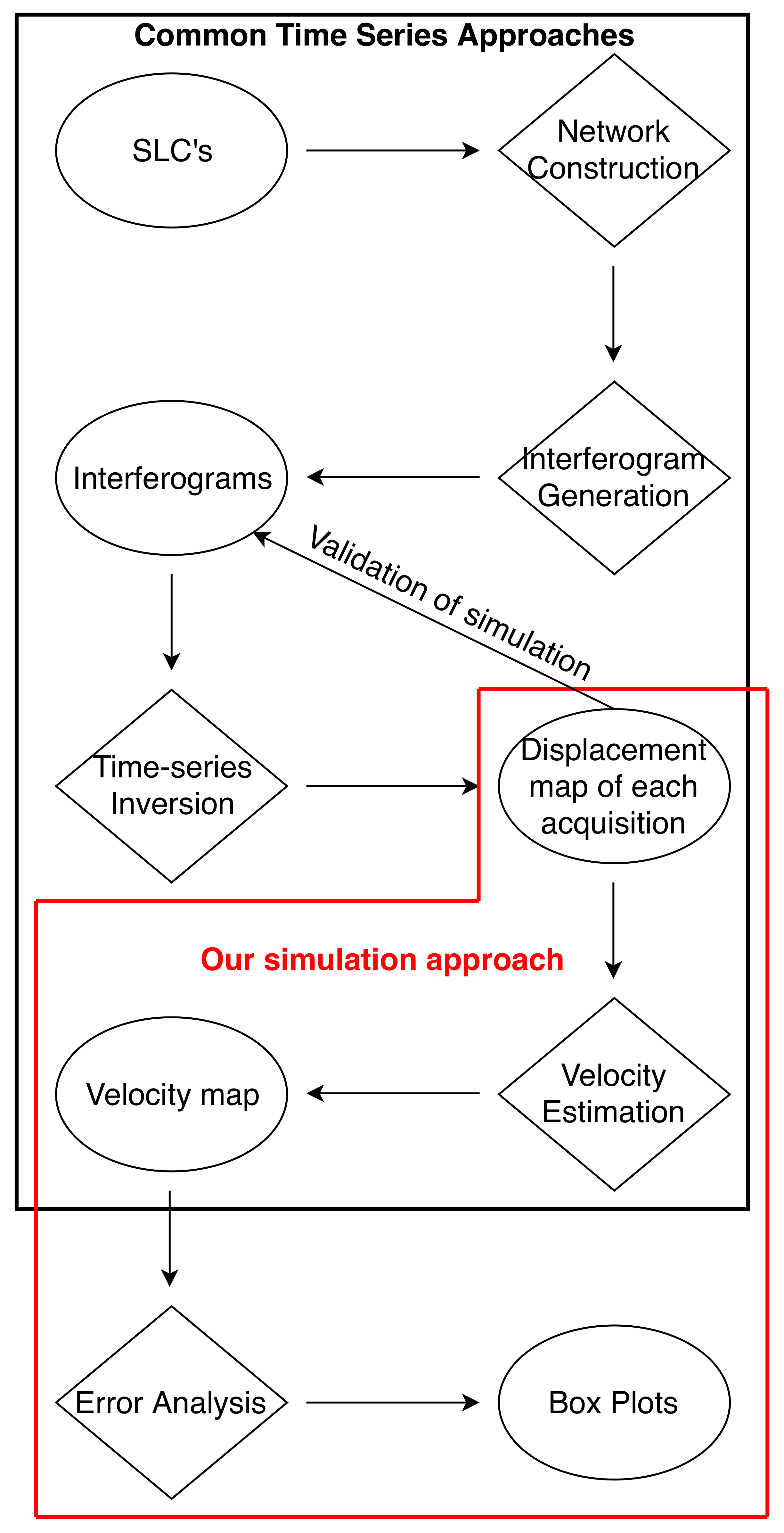
3. Data Simulation and Analysis
3.1. Tropospheric Delay Simulations
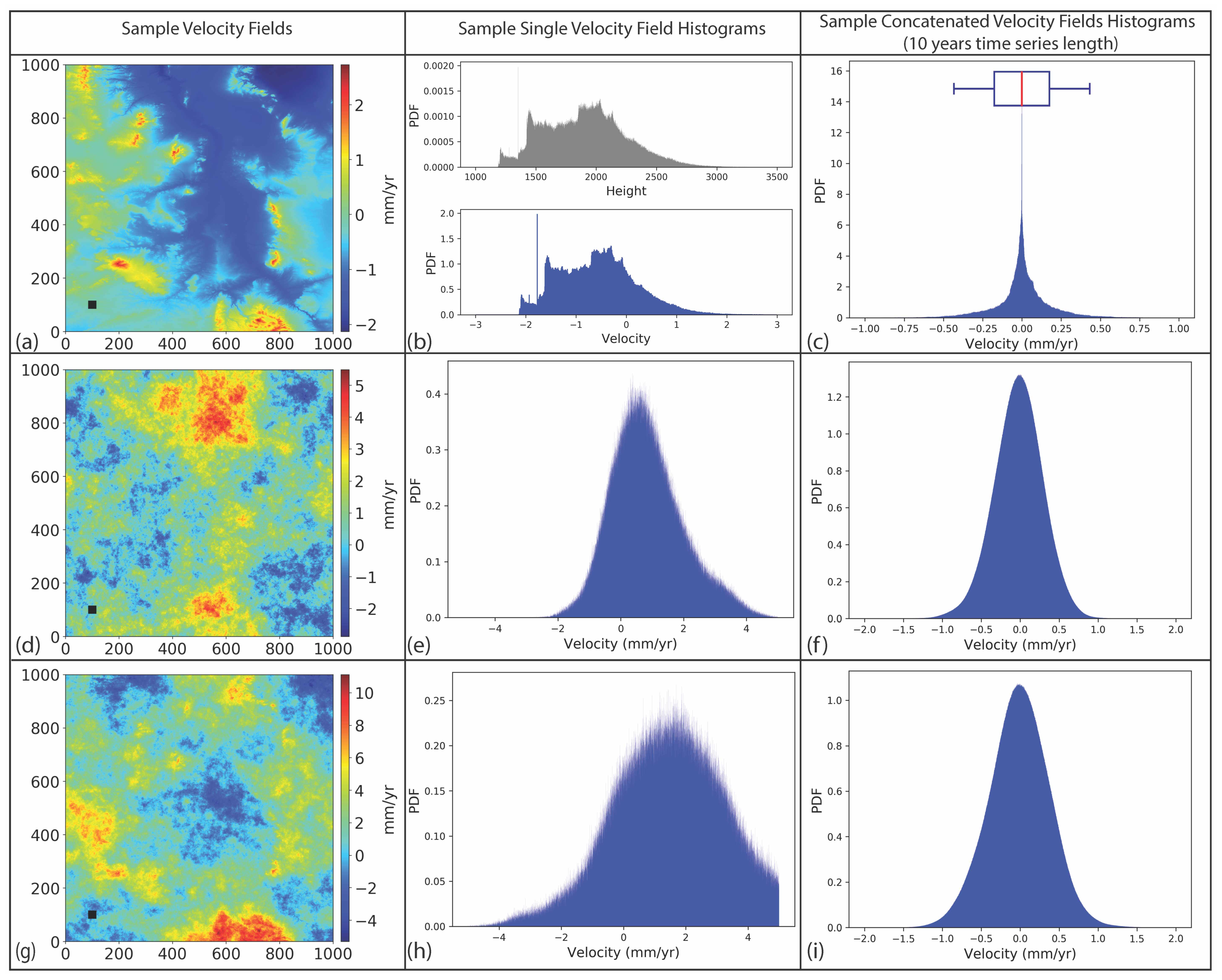
3.1.1. Tropospheric Delay Due to Vertical Stratification
3.1.2. Tropospheric Delay Due to Turbulence Mixing
3.1.3. Tropospheric Delay Due to Combination of Vertical Stratification and Turbulence Mixing
3.2. Velocity Estimation
3.3. Error Analysis
4. Results
5. Sensitivity Analysis
6. A Case Study: Application to Socorro Magma Body
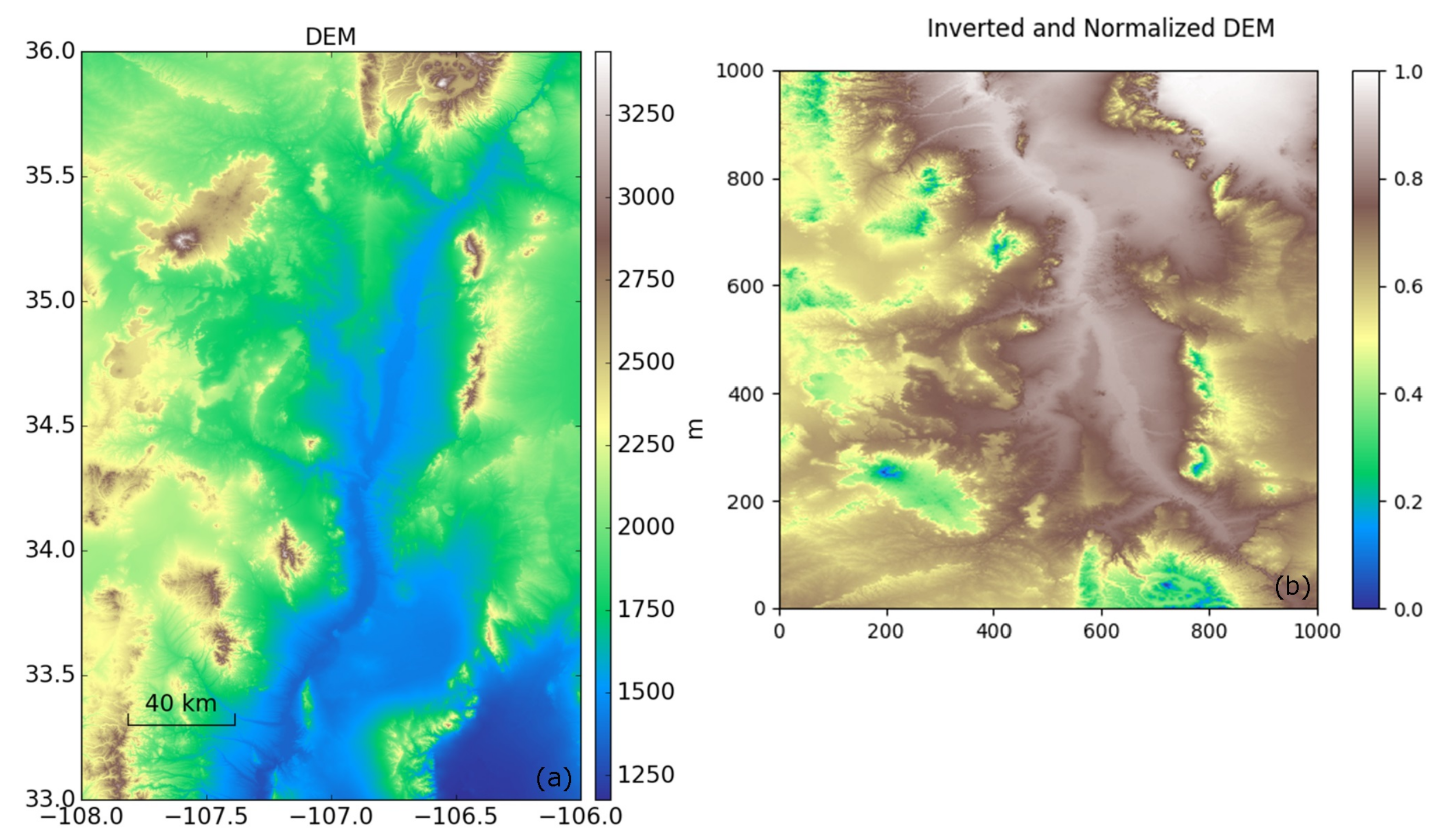
6.1. Study Area
6.2. Data and Processing
7. Discussion
8. Conclusions
- (1)
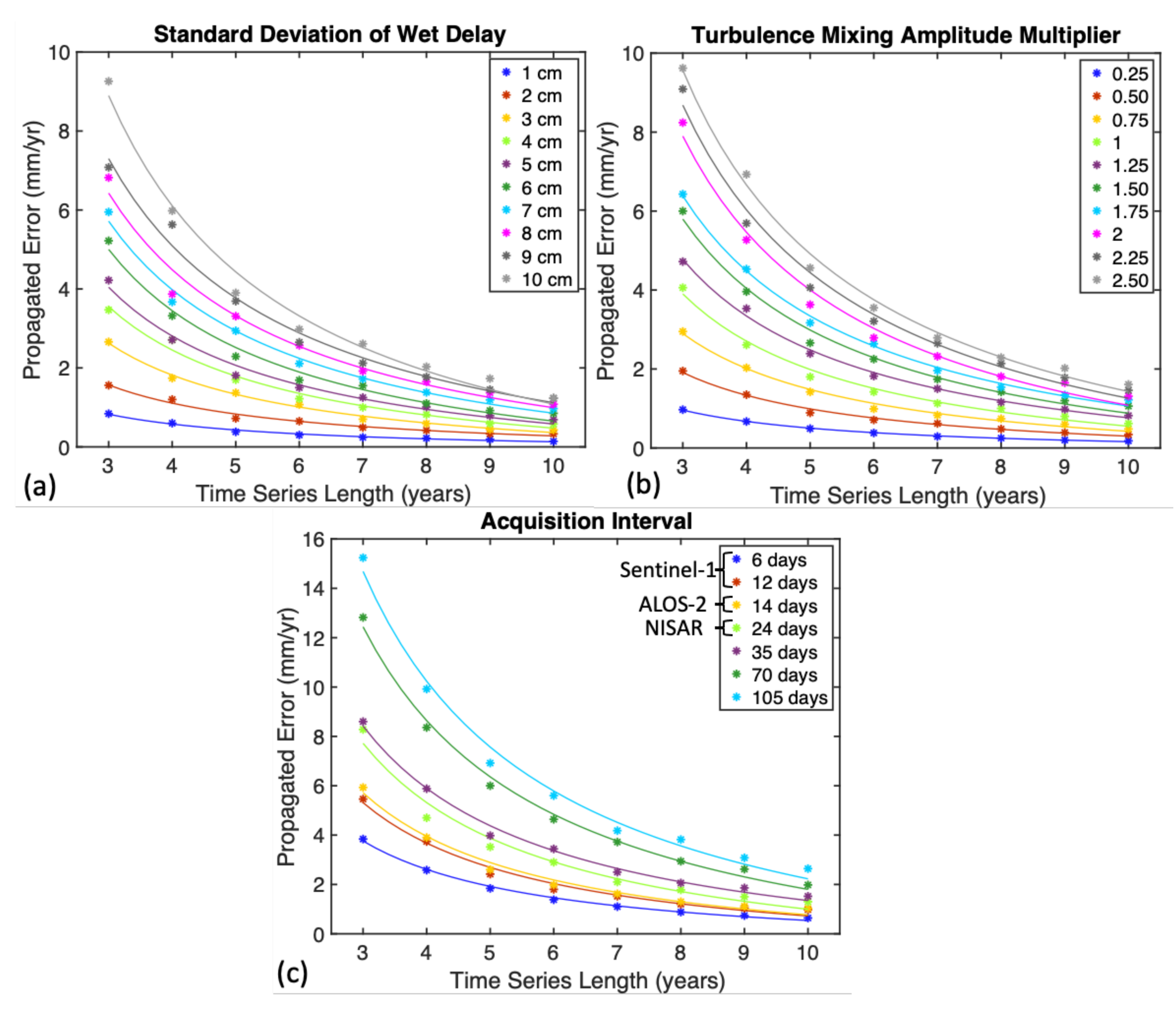
- Tropospheric delay due to vertical stratification is a systematic error source that produces localized errors around high topographic gradients. We found that a data set length of 6 years (given an acquisition interval of 35 days) is required to achieve a ≈1 mm/yr detection threshold.
- (2)
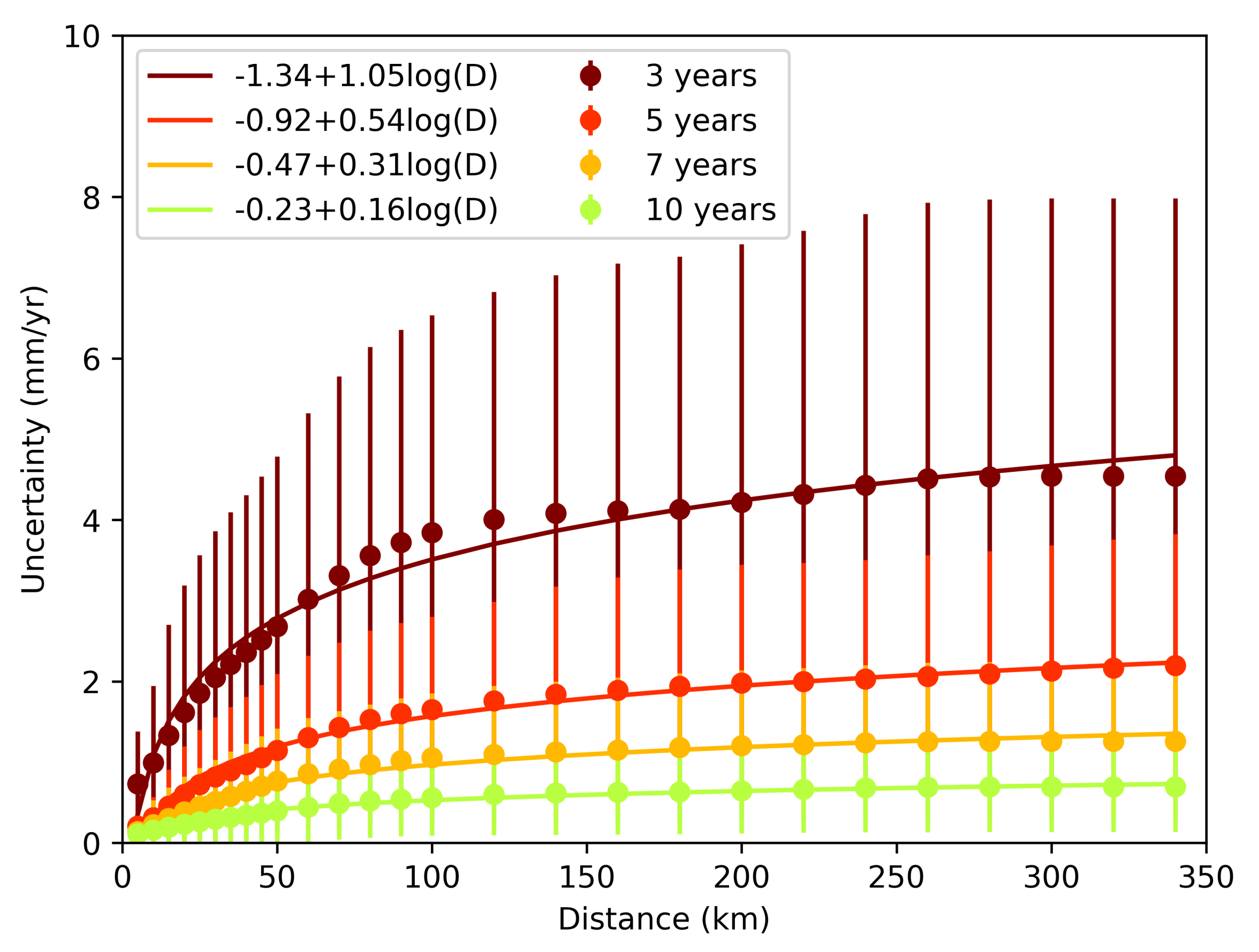
- Tropospheric delay due to turbulence mixing is a stochastic error and cannot be removed by modeling in space. Turbulence mixing has a larger impact on time-series products than vertical stratification. We showed that a 7-year (or longer) data set with a 35-day acquisition interval is required to achieve a ≈1 mm/yr detection threshold over 50 km.
- (3)
- By simulating the combined effect of both vertical stratification and turbulence mixing, we retrieved errors of similar magnitude to our simulations of turbulence mixing alone. Significantly, this highlights that turbulence mixing represents the main source of tropospheric errors in real-world applications. As such, even if we can model and systematically remove errors due to vertical stratification, nonnegligible errors may persist. A ≈1 mm/yr detection threshold would be possible with a time series longer than 8 years with a 35-day acquisition interval.
- (4)
- The decay characteristics of propagated errors concerning temporal coverage exhibit decay, which is denoted for the GPS studies by Zhang et al. (1997).
- (5)
- The acquisition strategies of new-generation Sentinel-1 satellites with a 6-day acquisition interval will provide ≈1 mm/yr detection level beyond 5 years with a 6-day acquisition interval.
- (6)
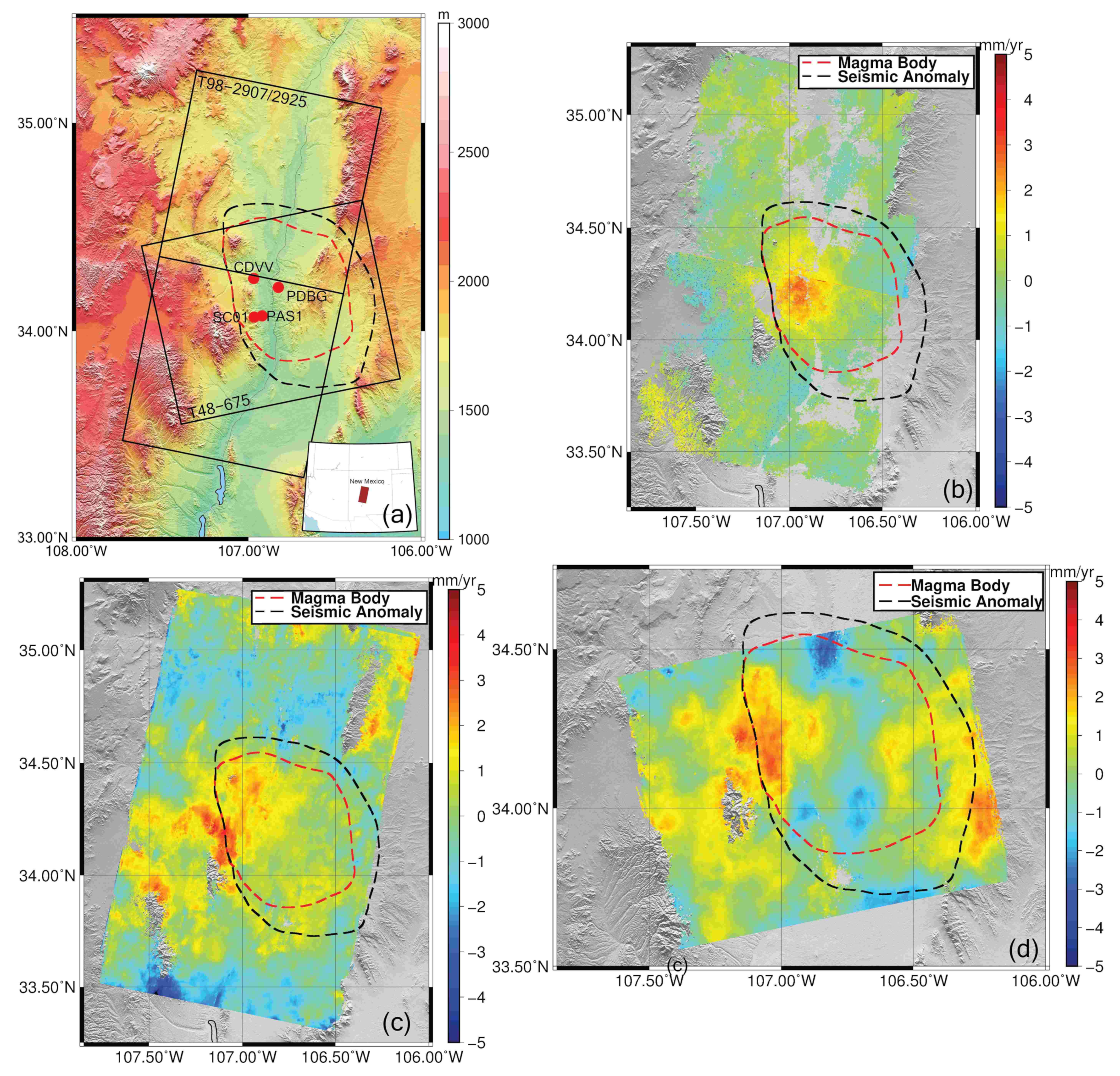
- We cannot quantitatively distinguish between the tropospheric delay and the slow uplift signal over Socorro Magma Body with a 5-year-long Envisat time series with the current methods. Our results show that a data set longer than 8 years is required with a 35-day acquisition interval. The ERS data set with 15-year-long time series fulfills this requirement and provides a high-resolution deformation map that is minimally affected by the tropospheric delay.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Derivation of Deviatoric Tropospheric Phase Delay
Appendix B. Absolute Standard Deviation of Wet Delay

References
- Massonnet, D.; Feigl, K.L. Radar Interferometry and its Application to Changes in the Earth’s Surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef] [Green Version]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic Aperture Radar Interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001; Volume 2, Available online: https://books.google.com/books?hl=en&lr=&id=bqNkJUk4wtMC&oi=fnd&pg=PA4&dq=Radar+Interferometry:+Data+Interpretation+and+Error+Analysis&ots=8PcslJG19Q&sig=vqN-YtuDqMMHaSVS-lNlE9wIzdk#v=onepage&q=Radar%20Interferometry%3A%20Data%20Interpretation%20and%20Error%20Analysis&f=false (accessed on 9 September 2020).
- Pepe, A.; Berardino, P.; Bonano, M.; Euillades, L.D.; Lanari, R.; Sansosti, E. SBAS-Based Satellite Orbit Correction for the Generation of DinSAR Time-Series: Application to Radarsat-1 Data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 5150–5165. [Google Scholar] [CrossRef]
- Fattahi, H.; Amelung, F. Dem Error Correction in InSAR Time Series. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4249–4259. [Google Scholar] [CrossRef]
- Yang, Y.; Pepe, A.; Manzo, M.; Casu, F.; Lanari, R. A Region-Growing Technique to Improve Multi-Temporal DinSAR Interferogram Phase Unwrapping Performance. Remote Sens. Lett. 2013, 4, 988–997. [Google Scholar] [CrossRef]
- López-Quiroz, P.; Doin, M.P.; Tupin, F.; Briole, P.; Nicolas, J.M. Time Series Analysis of Mexico City Subsidence Constrained by Radar Interferometry. J. Appl. Geophys. 2009, 69, 1–15. [Google Scholar] [CrossRef]
- Biggs, J.; Wright, T.; Lu, Z.; Parsons, B. Multi-Interferogram Method for Measuring Interseismic Deformation: Denali Fault, Alaska. Geophys. J. Int. 2007, 170, 1165–1179. [Google Scholar] [CrossRef] [Green Version]
- Zebker, H.A.; Villasenor, J. Decorrelation in Interferometric Radar Echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Fattahi, H.; Amelung, F. InSAR Bias and Uncertainty Due to the Systematic and Stochastic Tropospheric Delay. J. Geophys. Res. Solid Earth 2015, 120, 8758–8773. [Google Scholar] [CrossRef] [Green Version]
- Goldstein, R. Atmospheric Limitations to Repeat-Track Radar Interferometry. Geophys. Res. Lett. 1995, 22, 2517–2520. [Google Scholar] [CrossRef] [Green Version]
- Massonnet, D.; Feigl, K.L. Satellite Radar Interferometric Map of the Coseismic Deformation Field of the M = 6.1 Eureka Valley, California Earthquake of May 17, 1993. Geophys. Res. Lett. 1995, 22, 1541–1544. [Google Scholar] [CrossRef]
- Tarayre, H.; Massonnet, D. Atmospheric Propagation Heterogeneities Revealed by ERS-1 Interferometry. Geophys. Res. Lett. 1996, 23, 989–992. [Google Scholar] [CrossRef]
- Zebker, H.A.; Rosen, P.A.; Hensley, S. Atmospheric Effects in Interferometric Synthetic Aperture Radar Surface Deformation and Topographic Maps. J. Geophys. Res. Solid Earth 1997, 102, 7547–7563. [Google Scholar] [CrossRef]
- Emardson, T.; Simons, M.; Webb, F. Neutral Atmospheric Delay in Interferometric Synthetic Aperture Radar Applications: Statistical Description and Mitigation. J. Geophys. Res. Solid Earth 2003, 108. [Google Scholar] [CrossRef]
- Doin, M.P.; Lasserre, C.; Peltzer, G.; Cavalié, O.; Doubre, C. Corrections of Stratified Tropospheric Delays in SAR Interferometry: Validation with Global Atmospheric Models. J. Appl. Geophys. 2009, 69, 35–50. [Google Scholar] [CrossRef]
- Samsonov, S.V.; Trishchenko, A.P.; Tiampo, K.; González, P.J.; Zhang, Y.; Fernández, J. Removal of Systematic Seasonal Atmospheric Signal from Interferometric Synthetic Aperture Radar Ground Deformation Time Series. Geophys. Res. Lett. 2014, 41, 6123–6130. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, D.; Bürgmann, R.; Nadeau, R.; d’Alessio, M. Distribution of Aseismic Slip Rate on the Hayward Fault Inferred from Seismic and Geodetic Data. J. Geophys. Res. Solid Earth 2005, 110. [Google Scholar] [CrossRef] [Green Version]
- Wei, M.; Sandwell, D.; Smith-Konter, B. Optimal Combination of InSAR and GPS for Measuring Interseismic Crustal Deformation. Adv. Space Res. 2010, 46, 236–249. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent Scatterers in SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Onn, F.; Zebker, H. Correction for Interferometric Synthetic Aperture Radar Atmospheric Phase Artifacts Using Time Series of Zenith Wet Delay Observations from a GPS Network. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Löfgren, J.S.; Björndahl, F.; Moore, A.W.; Webb, F.H.; Fielding, E.J.; Fishbein, E.F. Tropospheric Correction for Insar Using Interpolated ECMWF Data and GPS Zenith Total Delay from the Southern California Integrated GPS Network. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 4503–4506. [Google Scholar]
- Li, Z.; Muller, J.P.; Cross, P.; Fielding, E.J. Interferometric Synthetic Aperture Radar (InSAR) Atmospheric Correction: GPS, Moderate Resolution Imaging Spectroradiometer (Modis), and InSAR Integration. J. Geophys. Res. Solid Earth 2005, 110, B03410. [Google Scholar] [CrossRef]
- Li, Z.; Fielding, E.J.; Cross, P.; Muller, J.P. Interferometric Synthetic Aperture Radar Atmospheric Correction: Medium Resolution Imaging Spectrometer and Advanced Synthetic Aperture Radar Integration. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef] [Green Version]
- Walters, R.; Elliott, J.; Li, Z.; Parsons, B. Rapid Strain Accumulation on The Ashkabad Fault (Turkmenistan) from Atmosphere-Corrected InSAR. J. Geophys. Res. Solid Earth 2013, 118, 3674–3690. [Google Scholar] [CrossRef] [Green Version]
- Parker, A.L.; Biggs, J.; Walters, R.J.; Ebmeier, S.K.; Wright, T.J.; Teanby, N.A.; Lu, Z. Systematic Assessment of Atmospheric Uncertainties for InSAR Data at Volcanic Arcs Using Large-Scale Atmospheric Models: Application to the Cascade Volcanoes, United States. Remote Sens. Environ. 2015, 170, 102–114. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Fielding, E.; Cross, P.; Preusker, R. Advanced InSAR Atmospheric Correction: MERIS/MODIS Combination and Stacked Water Vapour Models. Int. J. Remote Sens. 2009, 30, 3343–3363. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic Insar Tropospheric Phase Delay Corrections from Global Meteorological Reanalysis Data. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef] [Green Version]
- Jolivet, R.; Agram, P.S.; Lin, N.Y.; Simons, M.; Doin, M.P.; Peltzer, G.; Li, Z. Improving InSAR Geodesy Using Global Atmospheric Models. J. Geophys. Res. Solid Earth 2014, 119, 2324–2341. [Google Scholar] [CrossRef]
- Gao, B.C.; Kaufman, Y.J. The MODIS near-IR water vapor algorithm. In Algorithm Theoretical Basis Document, ATBD-MOD; 1998; Volume 5. Available online: https://modis.gsfc.nasa.gov/sci_team/meetings/199310/presentations/x21_nir.pdf (accessed on 9 September 2020).
- Gao, B.C.; Kaufman, Y.J. Water vapor retrievals using Moderate Resolution Imaging Spectroradiometer (MODIS) near-infrared channels. J. Geophys. Res. Atmos. 2003, 108. [Google Scholar] [CrossRef]
- Baechler, M.; Gilbride, T.L.; Cole, P.C.; Hefty, M.G.; Ruiz, K. High-Performance Home Technologies: Guide to Determining Climate Regions by County; US Department of Energy: Washington, DC, USA, 2015. Available online: https://www.energy.gov/sites/prod/files/2015/10/f27/ba_climate_region_guide_7.3.pdf (accessed on 9 September 2020).
- Puysségur, B.; Michel, R.; Avouac, J.P. Tropospheric Phase Delay in Interferometric Synthetic Aperture Radar Estimated from Meteorological Model and Multispectral Imagery. J. Geophys. Res. Solid Earth 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- González, P.J.; Fernández, J. Error Estimation in Multitemporal InSAR Deformation Time Series, with Application to Lanzarote, Canary Islands. J. Geophys. Res. Solid Earth 2011, 116. [Google Scholar] [CrossRef] [Green Version]
- Hanssen, R.F. Atmospheric Heterogeneities in ERS Tandem SAR Interferometry; Delft University Press: Delft, The Netherlands, 1998. [Google Scholar]
- Cavalié, O.; Doin, M.P.; Lasserre, C.; Briole, P. Ground Motion Measurement in the Lake Mead Area, Nevada, by Differential Synthetic Aperture Radar Interferometry Time Series Analysis: Probing the Lithosphere Rheological Structure. J. Geophys. Res. Solid Earth 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Elliott, J.; Biggs, J.; Parsons, B.; Wright, T. InSAR Slip Rate Determination on the Altyn Tagh Fault, Northern Tibet, in the Presence of Topographically Correlated Atmospheric Delays. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Tatarski, V.I. The Effects of the Turbulent Atmosphere on Wave Propagation. In Jerusalem: Israel Program for Scientific Translations; Harvard University Press: Cambridge, MA, USA, 1971; Available online: http://adsabs.harvard.edu/pdf/1971etaw.book.....T (accessed on 9 September 2020).
- Fialko, Y.; Simons, M. Evidence for On-Going Inflation of the Socorro Magma Body, New Mexico, from Interferometric Synthetic Aperture Radar Imaging. Geophys. Res. Lett. 2001, 28, 3549–3552. [Google Scholar] [CrossRef] [Green Version]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A New Method for Measuring Deformation on Volcanoes and Other Natural Terrains Using InSAR Persistent Scatterers. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Kampes, B.M. Displacement Parameter Estimation Using Permanent Scatterer Interferometry. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2005. [Google Scholar]
- Lanari, R.; Mora, O.; Manunta, M.; Mallorquí, J.J.; Berardino, P.; Sansosti, E. A Small-Baseline Approach for Investigating Deformations in Full-Resolution Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1377–1386. [Google Scholar] [CrossRef]
- Yunjun, Z.; Fattahi, H.; Amelung, F. Small baseline InSAR time series analysis: Unwrapping error correction and noise reduction. Comput. Geosci. 2019, 133, 104331. [Google Scholar] [CrossRef] [Green Version]
- Pearse, J.; Fialko, Y. Mechanics of Active Magmatic Intraplating in the Rio Grande Rift Near Socorro, New Mexico. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Sanford, A.R.; Alptekin, Ö.; Toppozada, T.R. Use of Reflection Phases on Microearthquake Seismograms to Map an Unusual Discontinuity Beneath the Rio Grande Rift. Bull. Seismol. Soc. Am. 1973, 63, 2021–2034. [Google Scholar]
- Balch, R.S.; Hartse, H.E.; Sanford, A.R.; Lin, K.w. A New Map of the Geographic Extent of the Socorro Mid-Crustal Magma Body. Bull. Seismol. Soc. Am. 1997, 87, 174–182. [Google Scholar]
- Reilinger, R.; Oliver, J. Modern Uplift Associated with a Proposed Magma Body in the Vicinity of Socorro, New Mexico. Geology 1976, 4, 583–586. [Google Scholar] [CrossRef]
- Larsen, S.; Reilinger, R.; Brown, L. Evidence of Ongoing Crustal Deformation Related to Magmatic Activity Near Socorro, New Mexico. J. Geophys. Res. Solid Earth 1986, 91, 6283–6292. [Google Scholar] [CrossRef]
- Brown, L.; Wille, D.; Zheng, L.; DeVoogd, B.; Mayer, J.; Hearn, T.; Sanford, W.; Caruso, C.; Zhu, T.F.; Nelson, D.; et al. COCORP: New Perspectives on the Deep Crust. Geophys. J. Int. 1987, 89, 47–54. [Google Scholar] [CrossRef] [Green Version]
- Ake, J.; Sanford, A. New Evidence for the Existence and Internal Structure of a Thin Layer of Magma at Mid-Crustal Depths Near Socorro, New Mexico. Bull. Seismol. Soc. Am. 1988, 78, 1335–1359. [Google Scholar]
- Finnegan, N.J.; Pritchard, M.E. Magnitude and Duration of Surface Uplift Above the Socorro Magma Body. Geology 2009, 37, 231–234. [Google Scholar] [CrossRef]
- Newman, A.; Love, D.; Chamberlin, R.; Dixon, T.; LaFemina, P.; Bilek, L.; Aster, R. Rapid Transient Deformation From a Shallow Magmatic Source at the Socorro Magma Body, NM, USA. In AGU Fall Meeting Abstracts; G43C-02; American Geophysical Union: Washington, DC, USA, 2004. [Google Scholar]
- Jackson, M. UNAVCO GPS Network—PAS1-Passcal #1 P.S.; The GAGE Facility operated by UNAVCO, Inc.; UNAVCO, Inc.: Boulder, CO, USA, 2001. [Google Scholar]
- UNAVCO Community, K.M. SuomiNet-C GPS Network—SC01-NMT Socorro P.S.; The GAGE Facility operated by UNAVCO, Inc.; UNAVCO, Inc.: Boulder, CO, USA, 2001. [Google Scholar]
- Newman, A. Socorro GPS Network—CDVV-Canada Viveroso P.S.; The GAGE Facility operated by UNAVCO, Inc.; UNAVCO, Inc.: Boulder, CO, USA, 2005. [Google Scholar]
- Newman, A. Socorro GPS Network—PDBG-Puertocito del Bowling Green P.S.; The GAGE Facility operated by UNAVCO, Inc.; UNAVCO, Inc.: Boulder, CO, USA, 2005. [Google Scholar]
- Blewitt, G.; Hammond, W.C.; Kreemer, C. Harnessing the GPS data explosion for interdisciplinary science. Eos 2018, 99, 1–2. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. GAMMA SAR And Interferometric Processing Software. In Proceedings of the ERS-ENVISAT Symposium, Gothenburg, Sweden, 16–20 October 2000; Citeseer: Gothenburg, Sweden, 2000; Volume 1620, p. 1620. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated Repeat Orbit Interferometry Package Released. Eos Trans. Am. Geophys. Union 2004, 85, 47. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.W.; Zebker, H.A. Two-Dimensional Phase Unwrapping with Use of Statistical Models for Cost Functions in Nonlinear Optimization. JOSA A 2001, 18, 338–351. [Google Scholar] [CrossRef] [Green Version]
- Usai, S. A Least Squares Database Approach for SAR Interferometric Data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 753–760. [Google Scholar] [CrossRef] [Green Version]
- Fattahi, H. Geodetic Imaging of Tectonic Deformation with InSAR. Ph.D. Thesis, University of Miami, Miami, FL, USA, 2015. [Google Scholar]
- Marinkovic, P.; Larsen, Y. Consequences of Long-Term ASAR Local Oscillator Frequency Decay-An Empirical Study of 10 Years of Data. In Proceedings of the Living Planet Symposium, Edinburgh, UK, 9–13 September 2013; European Space Agency: Frascati, Italy, 2013. [Google Scholar]
- Pepe, A.; Lanari, R. On The Extension of The Minimum Cost Flow Algorithm for Phase Unwrapping of Multitemporal Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2374–2383. [Google Scholar] [CrossRef]
- Yu, C.; Li, Z.; Penna, N.T. Interferometric Synthetic Aperture Radar Atmospheric Correction Using a GPS-Based Iterative Tropospheric Decomposition Model. Remote Sens. Environ. 2018, 204, 109–121. [Google Scholar] [CrossRef]
- Liao, H.; Wdowinski, S.; Li, S. Regional-scale hydrological monitoring of wetlands with Sentinel-1 InSAR observations: Case study of the South Florida Everglades. Remote Sens. Environ. 2020, 251, 112051. [Google Scholar] [CrossRef]
- Zhang, J.; Bock, Y.; Johnson, H.; Fang, P.; Williams, S.; Genrich, J.; Wdowinski, S.; Behr, J. Southern California Permanent GPS Geodetic Array: Error Analysis of Daily Position Estimates and Site Velocities. J. Geophys. Res. Solid Earth 1997, 102, 18035–18055. [Google Scholar] [CrossRef]
- Lin, Y.n.N.; Simons, M.; Hetland, E.A.; Muse, P.; DiCaprio, C. A Multiscale Approach to Estimating Topographically Correlated Propagation Delays in Radar Interferograms. Geochem. Geophys. Geosyst. 2010, 11. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, L.; Ding, X.; Lu, Z.; Li, X. A joint model for isolating stratified tropospheric delays in multi-temporal Insar. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2258–2261. [Google Scholar]
- Shapiro, S.S.; Wilk, M.B. An Analysis of Variance Test for Normality (complete samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Flight Direction | Track | Frame | No. of Images |
|---|---|---|---|---|
| ERS-1/2 | Desc. | 98 | 2907 | 33 |
| ERS-1/2 | Desc. | 98 | 2925 | 38 |
| Envisat | Desc. | 98 | 2907, 2925 | 27 |
| Envisat | Asc. | 48 | 675 | 22 |
| T (Years) | (mm/yr) | N (# of Images) | (cm) |
|---|---|---|---|
| 3 | 8.68 (±4.34) | 32 | 4.39 |
| 4 | 6.20 (±3.10) | 42 | 4.75 |
| 5 | 4.38 (±2.19) | 53 | 4.69 |
| 6 | 3.42 (±1.71) | 63 | 4.78 |
| 7 | 2.54 (±1.27) | 73 | 4.45 |
| 8 | 2.30 (±1.15) | 84 | 4.93 |
| 9 | 1.70 (±0.85) | 94 | 4.33 |
| 10 | 1.46 (±0.73) | 105 | 4.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Havazli, E.; Wdowinski, S. Detection Threshold Estimates for InSAR Time Series: A Simulation of Tropospheric Delay Approach. Sensors 2021, 21, 1124. https://doi.org/10.3390/s21041124
Havazli E, Wdowinski S. Detection Threshold Estimates for InSAR Time Series: A Simulation of Tropospheric Delay Approach. Sensors. 2021; 21(4):1124. https://doi.org/10.3390/s21041124
Chicago/Turabian StyleHavazli, Emre, and Shimon Wdowinski. 2021. "Detection Threshold Estimates for InSAR Time Series: A Simulation of Tropospheric Delay Approach" Sensors 21, no. 4: 1124. https://doi.org/10.3390/s21041124