
A Comparative Study of 3D UE Positioning in 5G New Radio with a Single Station




Abstract
:1. Introduction
- Minimum additional signaling and infrastructure: In this work, the positioning information is extracted by the propagation process estimation of the SRS on the receiver side. This means that the method can be applied to existing systems without additional signaling, protocol, or hardware/infrastructure modifications.
- Free from the multiple sites synchronization: Our work is different from TDoA-based multilateration or hyperbolic approaches that require costly timing synchronization between distributed sites and the positioning function. The joint azimuth, elevation, and delay estimation methods are used in this work.
- High capacity: Our work benefits from the orthogonality in the time and frequency domains of SRSs from the different UEs. The algorithms can be applied to each individual UE for positioning estimation without interference from other UEs. Theoretically, the positioning capacity equals the number of Zadoff–Chu sequences used for UEs.
- Flexibility: The position estimation algorithms of this work can easily adapt to the different subcarrier spacing and channel bandwidth combinations in the 5G NR for diverse positioning accuracy levels required by different application scenarios.
2. System Hypotheses and Signal Modeling
2.1. Hypotheses
- Frequency band: This work focuses on the sub-6 GHz band (e.g., 3.5 GHz) of the 5G NR carrier bands. Compared with the mmWave band, the sub-6GHz signal has less propagation loss and larger outdoor coverage, which is more suitable for manned or unmanned drones or vehicles.
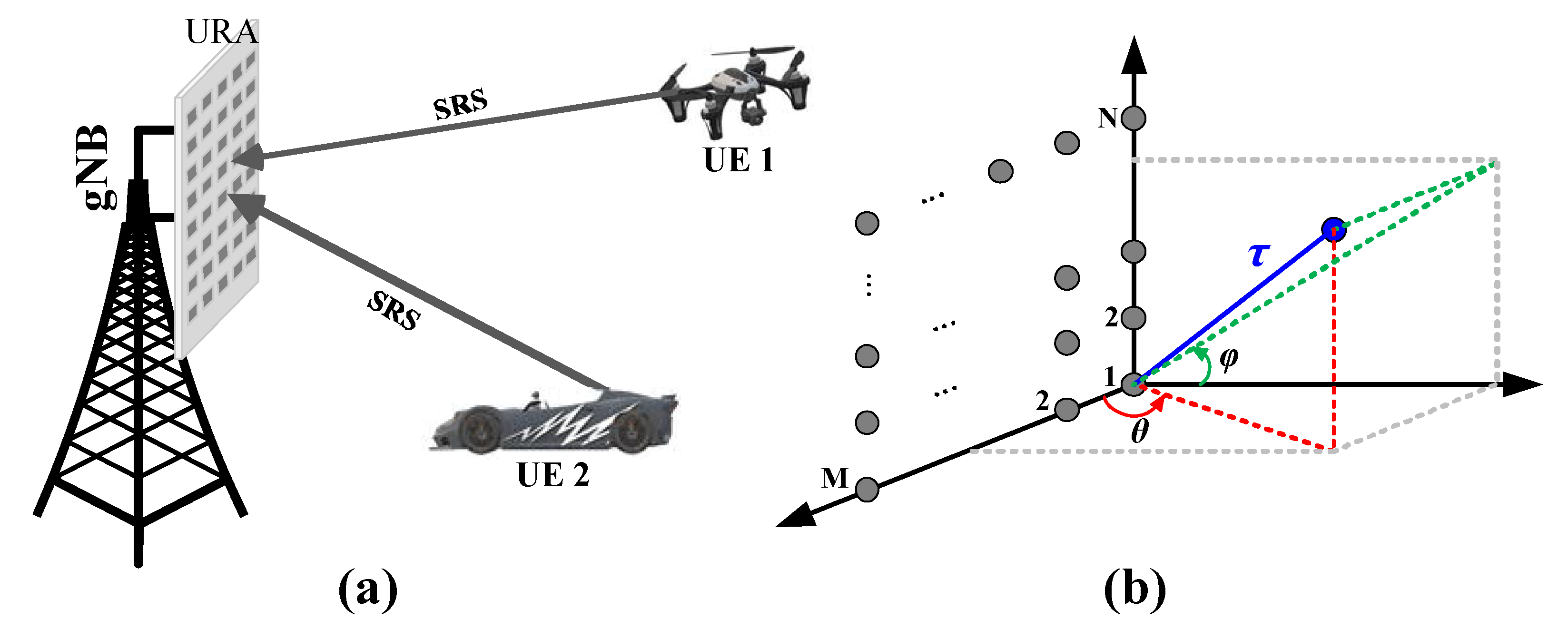
- Receiving antenna: In order to obtain the 3D position of a signal source without trilateration or hyperbolic positioning, the positioning station (i.e., the base station) needs to be able to measure the azimuth, elevation angles, and the time delay simultaneously. Therefore, a uniform rectangular array (URA) is utilized at the receiver end to be capable of spanning the whole azimuth and elevation dimension. The modeling of URA is introduced in Section 2.3.
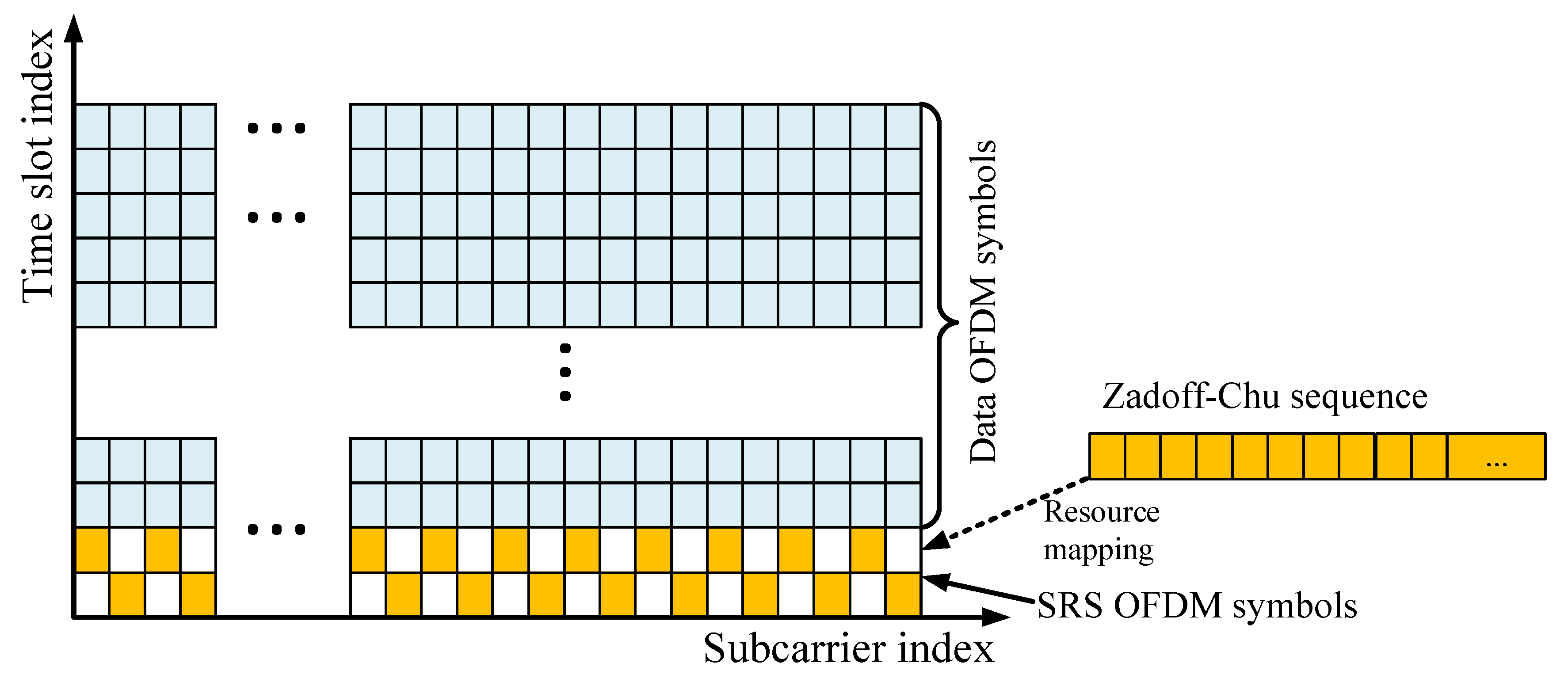
- Signal: The uplink 5G NR sounding reference signal (NR-SRS) sent by the UE is applied. The NR-SRS is an OFDM modulated Zadoff–Chu sequence that is feasible for time delay estimation. The introduction and modeling of SRS are given in Section 2.2.
- Algorithm: The extended subspace method and expectation-maximization (EM)-based algorithms are investigated for 3D positioning. The positioning algorithms are given in Section 3.
- Positioning host: The URA and positioning algorithms are hosted at the 5G base station (called gNB in 5G terminology), so as to leverage the computing power and energy supply to accommodate the large-scale URA in the sub-6 GHz band and run the positioning algorithms.
2.2. Sounding Reference Signal in 5G NR
2.2.1. Zadoff–Chu Sequence Generation
2.2.2. Resource Mapping
2.2.3. Propagation Delay Impact on SRS OFDM Symbols
2.3. Uniform Rectangular Array Signal Model
2.4. Signal Model for 3D Positioning
3. 3D Positioning Algorithms
3.1. Subspace-Based Approach
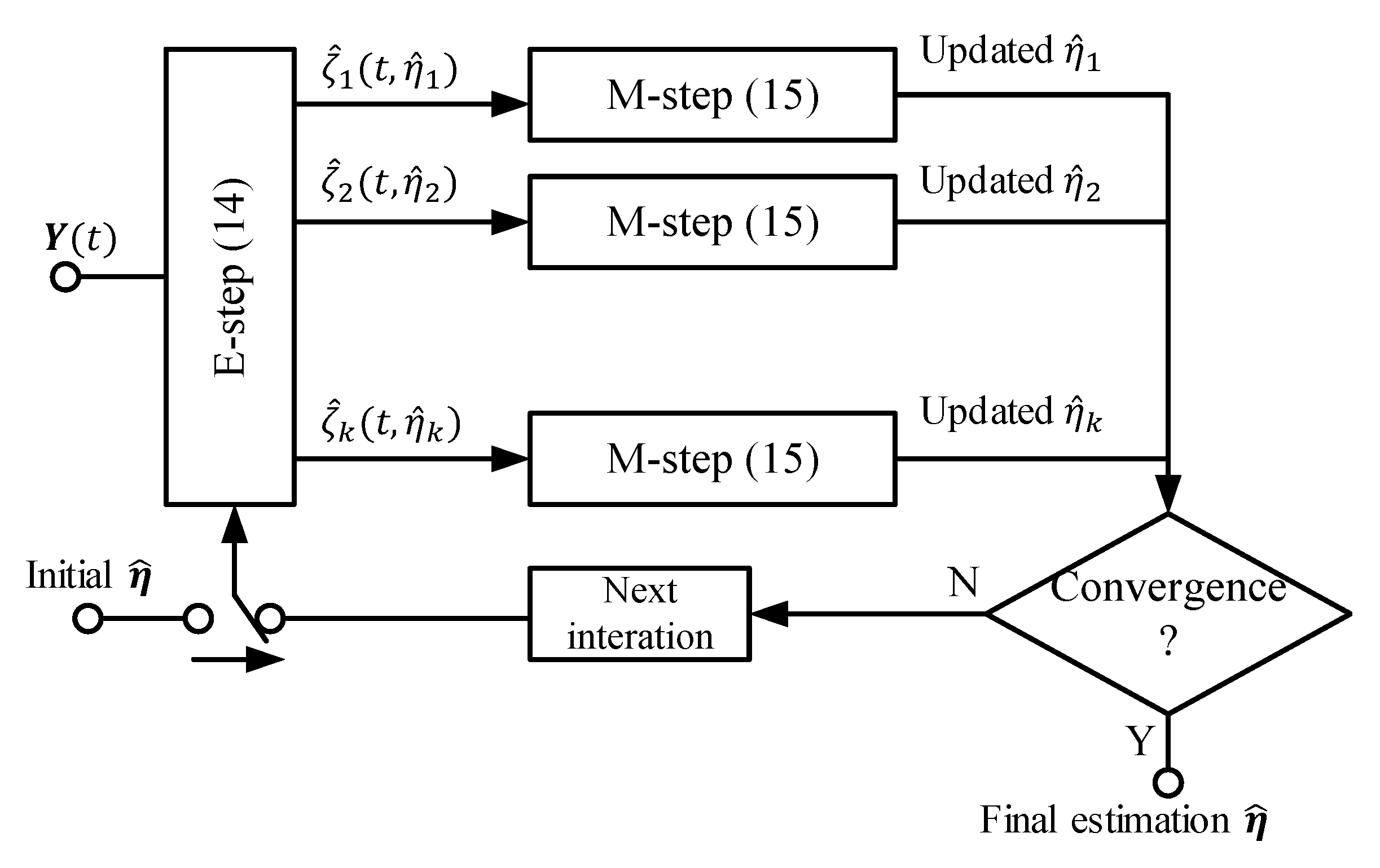
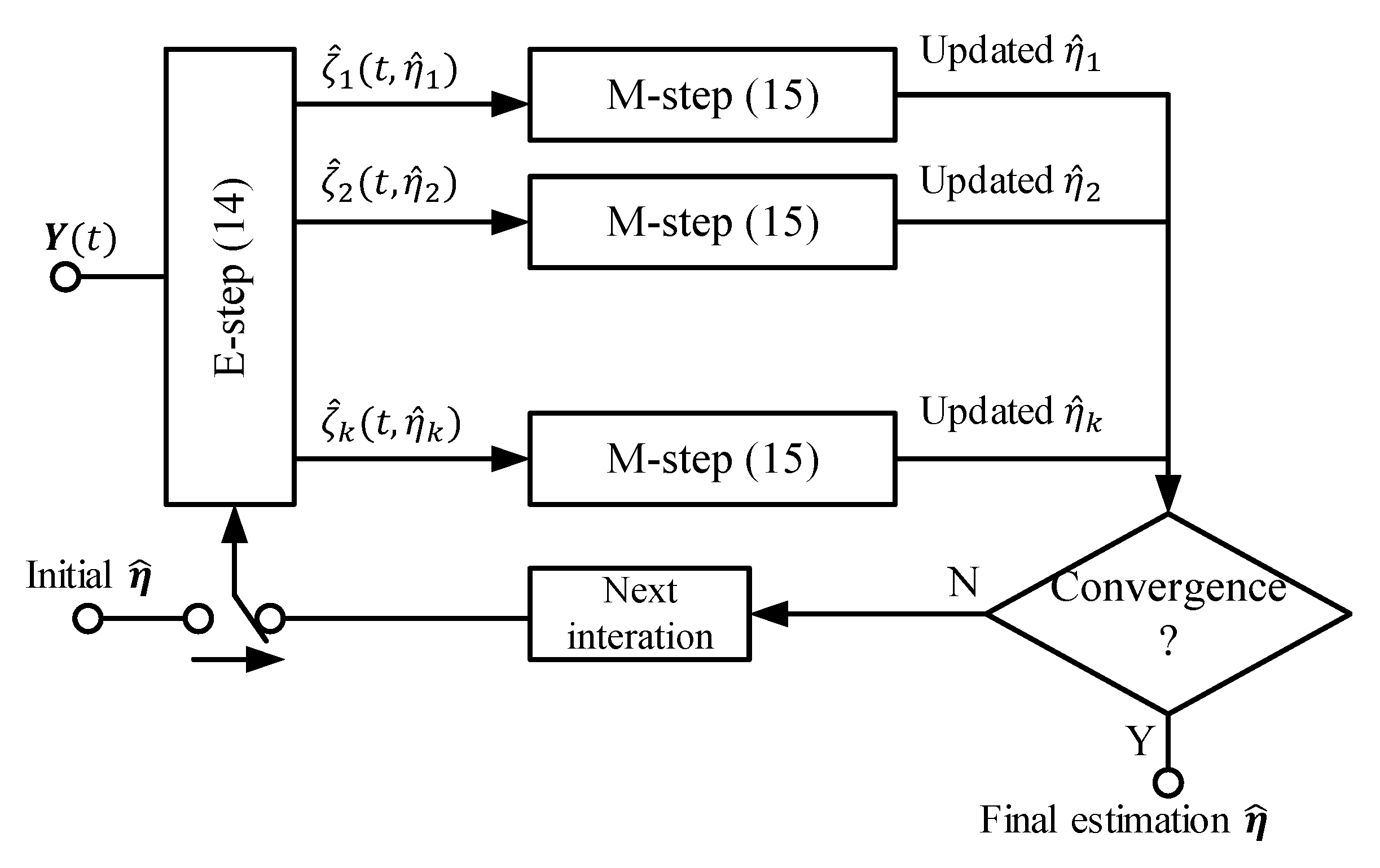
3.2. Statistics-Based Approach
4. Performance Comparison
4.1. Simulation Setting and Examples
4.1.1. Simulation Setting
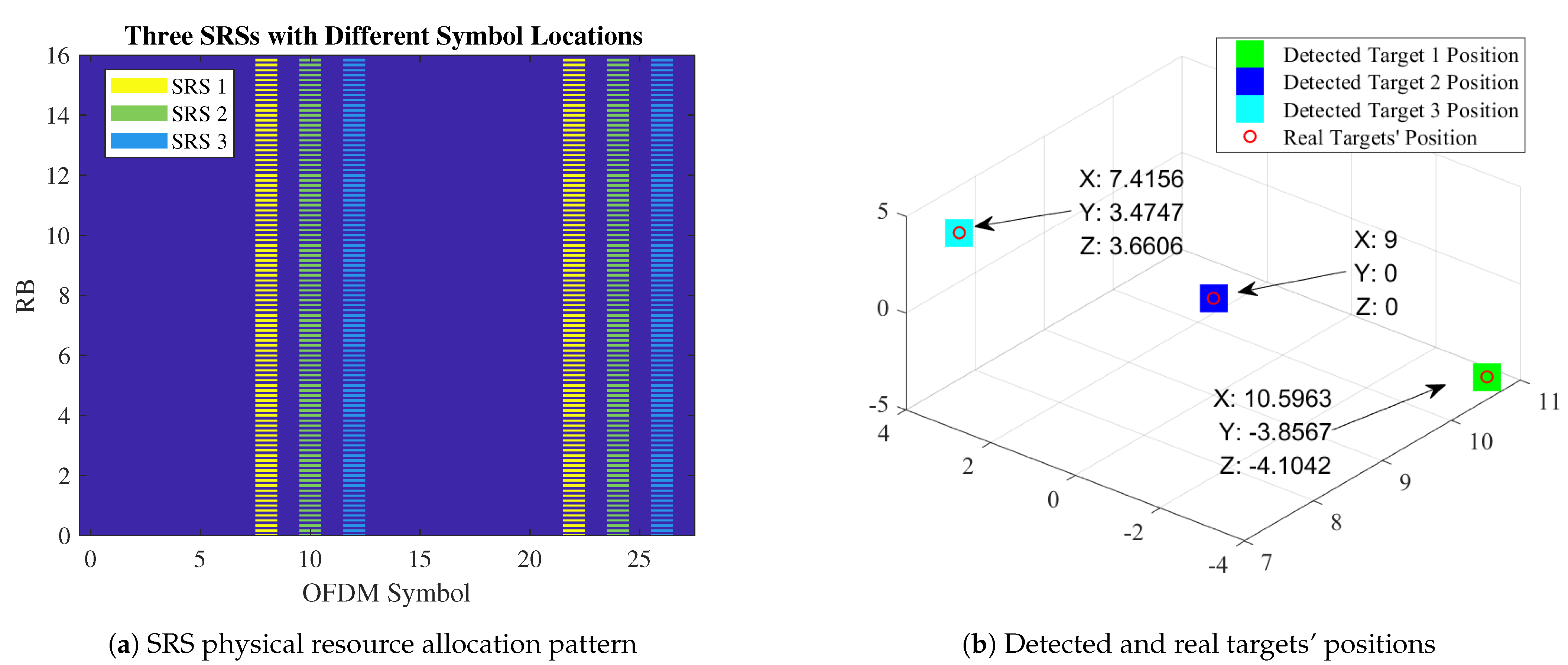
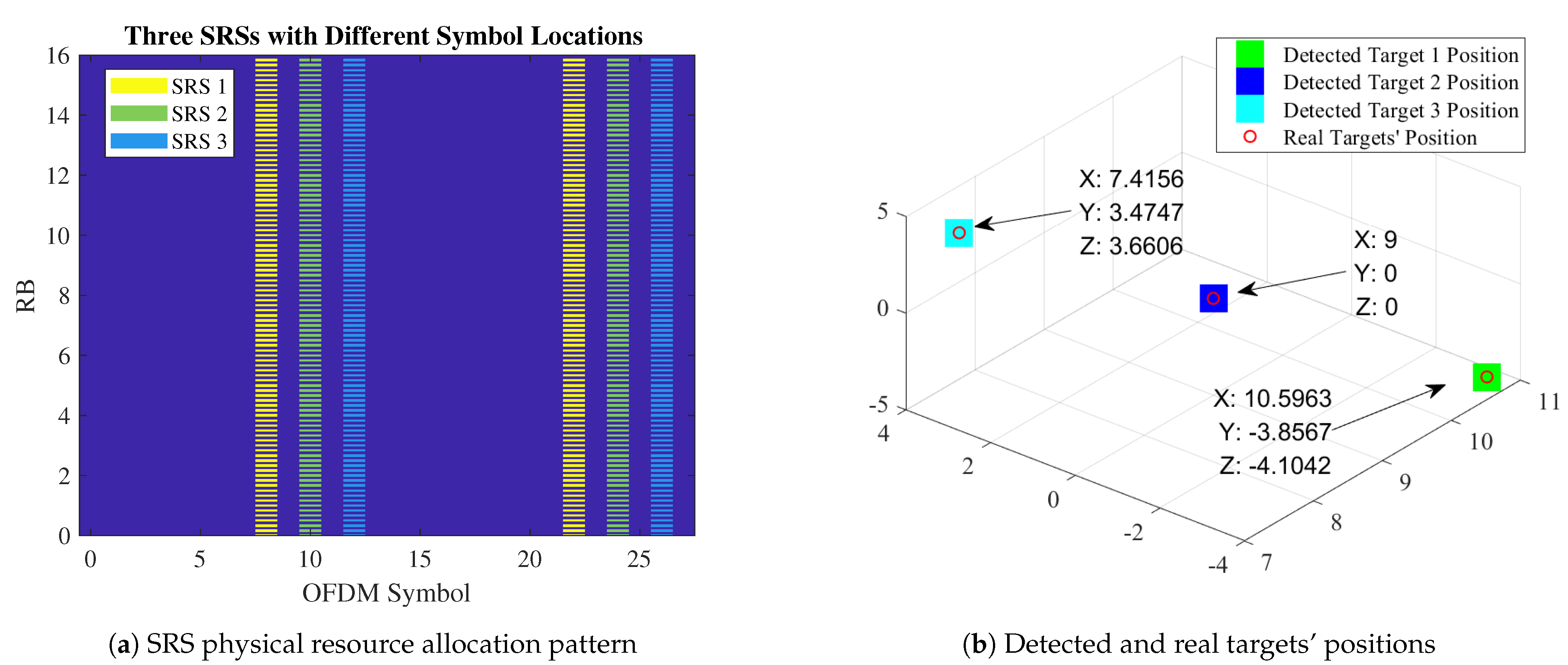
4.1.2. Example SRS and Positioning Result
4.2. Performance Comparison of Positioning Accuracy in Different Contexts
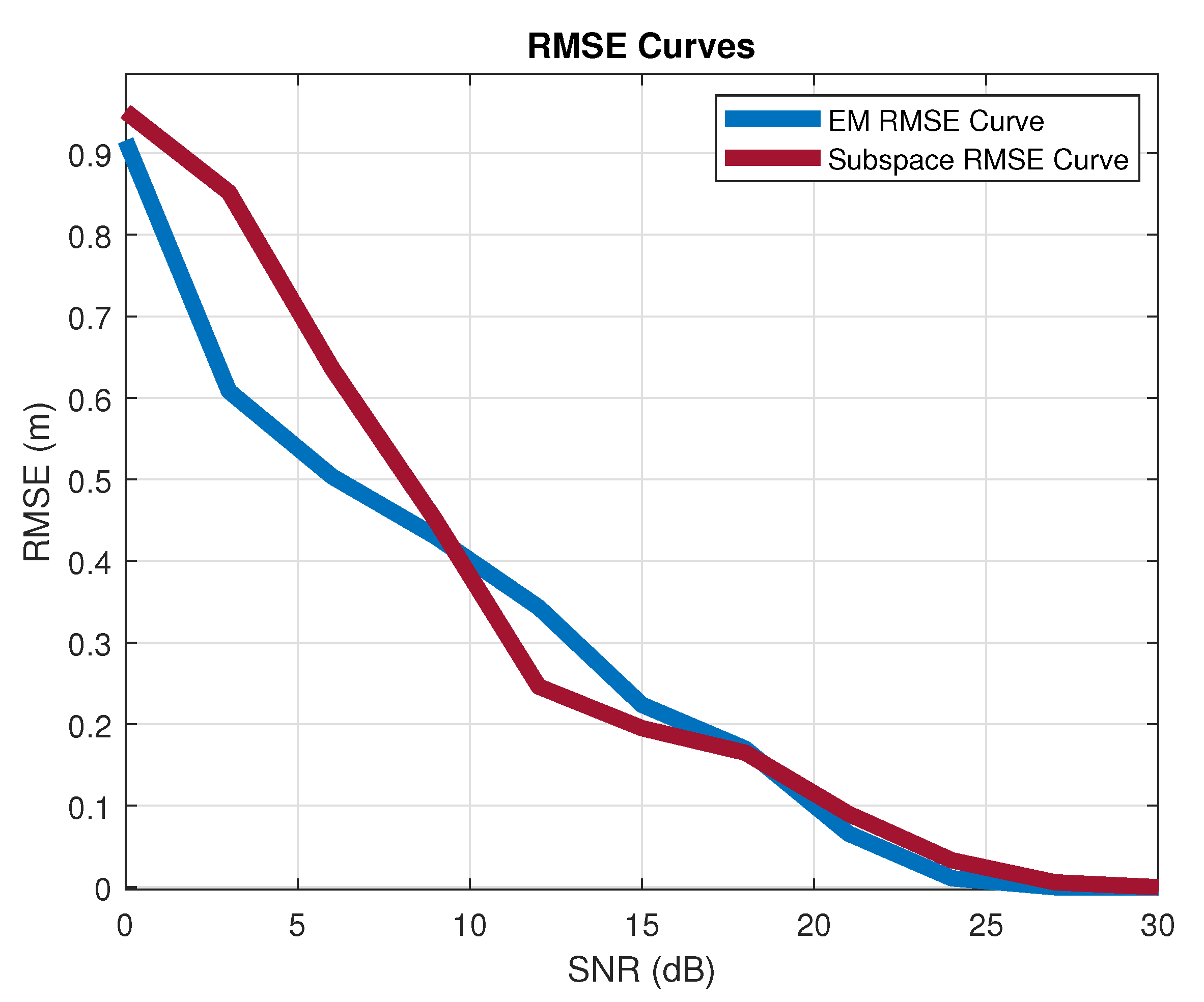
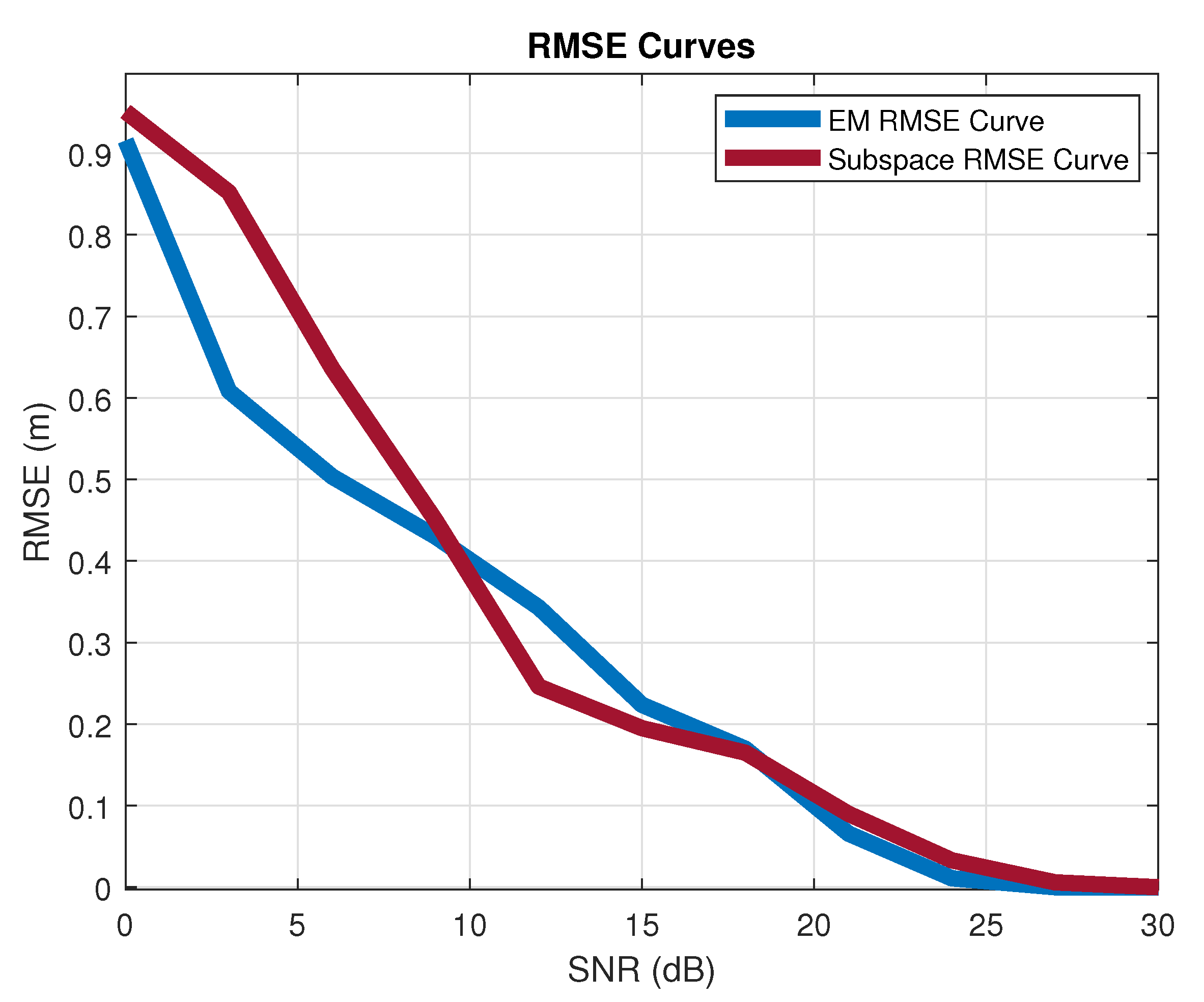
4.2.1. Single Target Estimation Performance
4.2.2. Impact of the Nearby Reflection
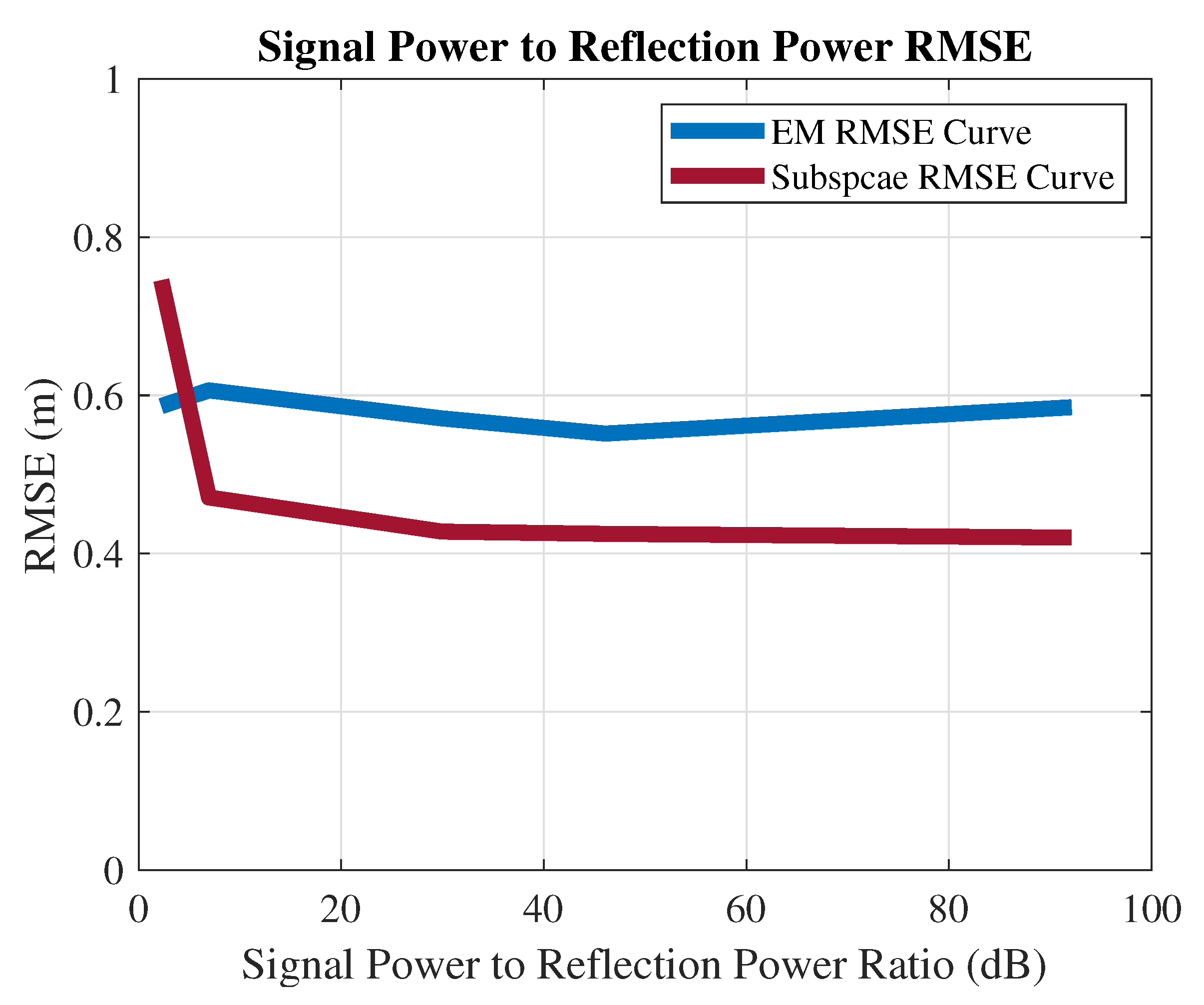
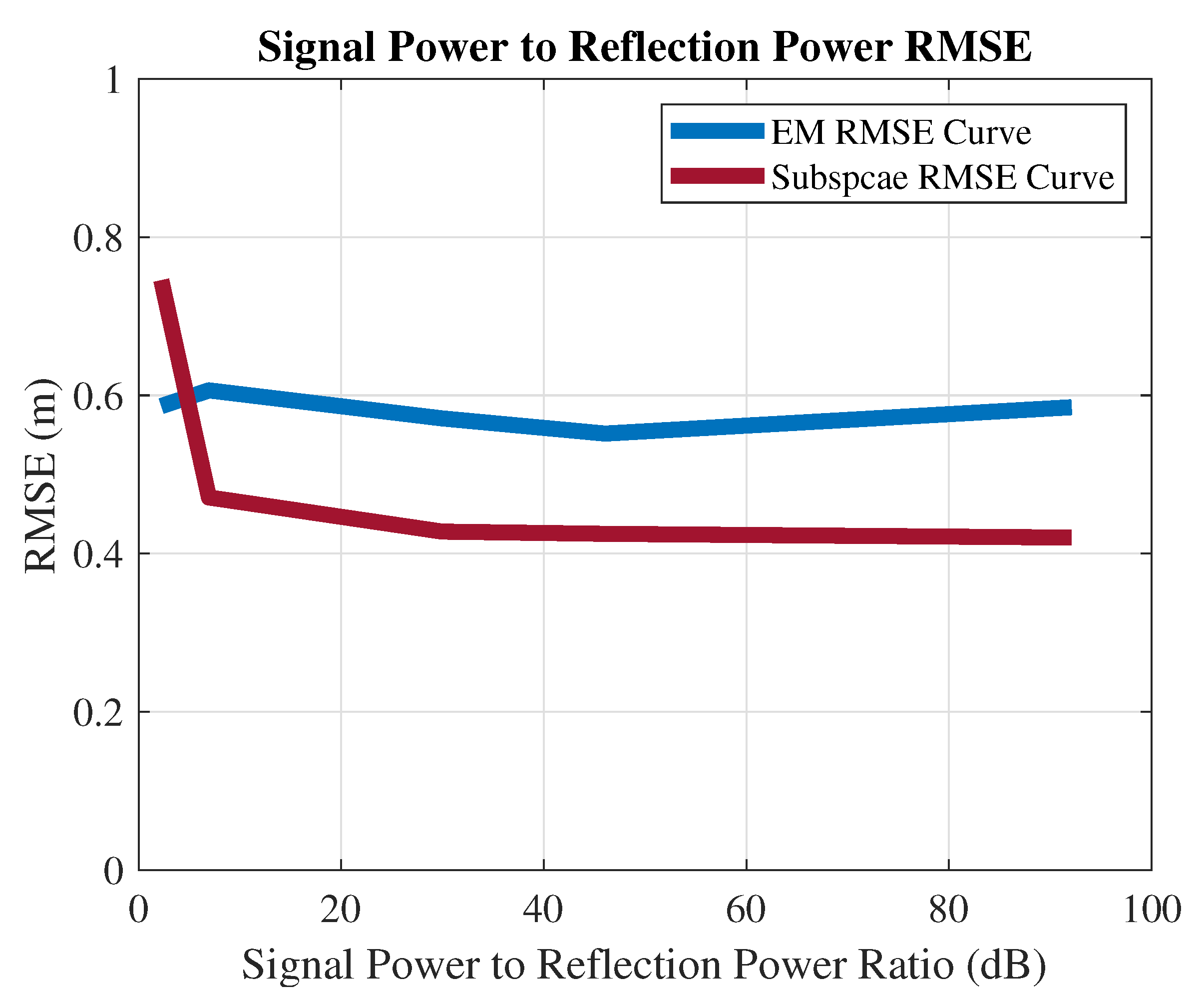
- RMSE vs. power: The total bandwidth is 60 MHz, and the SRS uses 2.88 MHz. The reflection signal is set at a fixed range m and the angles. The EM and subspace algorithms’ positioning RMSEs versus different signal power-to-reflection power ratio (SPRP) levels are collected in Figure 8. The EM estimation accuracy decreases with the power of the reflection. However, the influence of the SPRP on the subspace algorithm is more severe (constantly around 0.6, as shown in Figure 5, as the subspace algorithm is more sensitive to the correlated sources.
4.3. Limitations and Discussion
- Computational load of the subspace algorithm: As can be seen from Equations (6), (10), and (11), the subspace algorithm involves two Kronecker operations and one covariance operation of the Kronecker product. These facts imply that the vector and matrix size will increase exponentially with the number of antenna elements and the subcarriers; moreover, the base station will have to allocate more computing resources for positioning information extraction. Therefore, the development of a computational efficient subspace-based algorithm will pave the wary for applying the subspace-based algorithms in practice.
- Multipath propagation: The orthogonality of the SRSs from different UEs avoids the mutual interference to achieve the high positioning capacity. However, the multipath distortions of the ToA parameter estimation is unavoidable because the multiple copies of the signal originated from the same SRS with a recognizable ToA difference are strongly correlated. As can be seen from the results in Section 4.2.2, the estimation RMSE of the position increases if there exists a copy of the SRS close to the UE. Hence, the multipath mitigation schemes with high spatial resolution are the problem to be solved in future work.
- UEs’ mobility: The mobility of the UEs will cause position changes during the 20 ms observation time of the SRS in this work. By using the same codes that generated the results in Section 4.2, we find that the estimated position of a moving UE is located at the middle point between the two positions of that UE when the observation starts (0 ms) and ends (20 ms). For example, let us assume that the mobility of one target is 70 km/h. The radial distance between the positions when the SRS observation started at (0 ms) and ended at (20 ms) is then 0.39 m. Under no reflections and a line-of-sight scenario, the estimated position radial distance to the UE’s final position is 0.19 m (around 0.39/2). This example shows that mobility related error exists, and it increases with UE speed. In order to reduce the performance reduction introduced by the mobility of UEs, reducing the observation time can be a straightforward approach.
- Non-line-of-sight positioning: Regarding the non-line-of-sight scenario, this work mainly has two issues that are addressed. The first one is related to the multipath propagation. Multipath indeed makes the estimation difficult as we discussed in the multipath part, when we showed how the nearby reflected signal decreased the estimation accuracy. Furthermore, the position estimation in this case is more challenging than for the line-of-sight, as it has a weak signal strength and a small ToA difference. The second issue is related to the fact that this design can directly estimate the incident angle rather than the reflection angle on the surface where reflection and scattering occur. Thus, this design shall utilize the environment reflection information and the UE’s SRS to jointly calculate the target’s position.
- Requirement of prior knowledge: Both the subspace and EM algorithms in this paper take advantage of the prior knowledge of the SRS and channel equalization to estimate the angle and propagation delay. However, the SRS is only sparsely distributed in the 5G NR frames. These facts limited the effective samples that can be used for positioning purposes. In addition, both algorithms need to know the number of signal sources to achieve good estimation accuracy. Thus, the blind source separation or blind estimation schemes are also promising topics to explore in the context of 5G NR signal-based positioning.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Zadoff–Chu Base Sequence and Resource Mapping Rules
Appendix A.1. Zadoff–Chu Base Sequence and Variants
Appendix A.2. Sub-Carrier and Time-Slot Mapping
References
- Ruotsalainen, L.; Kirkko-Jaakkola, M.; Rantanen, J.; Mäkelä, M. Error Modeling for Multi-Sensor Measurements in Infrastructure-Free Indoor Navigation. Sensors 2018, 18, 590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Y.; Gerasimenko, M.; Kovalchukov, R.; Stusek, M.; Urama, J.; Hosek, J.; Valkama, M.; Lohan, E.S. Feasibility of Location-Aware Handover for Autonomous Vehicles in Industrial Multi-Radio Environments. Sensors 2020, 20, 6290. [Google Scholar] [CrossRef] [PubMed]
- Alamleh, H.; Gourd, J. Unobtrusive Location-based Access Control Utilizing Existing IEEE 802.11 Infrastructure. In Proceedings of the 2020 IEEE Microwave Theory and Techniques in Wireless Communications (MTTW), Riga, Latvia, 1–2 October 2020; Volume 1, pp. 157–162. [Google Scholar] [CrossRef]
- Alharbi, M.; Karimi, H.A. A Global Path Planner for Safe Navigation of Autonomous Vehicles in Uncertain Environments. Sensors 2020, 20, 6103. [Google Scholar] [CrossRef] [PubMed]
- Nisar, F. Location based Authentication Service using 4G/5G Devices. In Proceedings of the 2019 International Conference on Communication Technologies (ComTech), Rawalpindi, Pakistan, 20–21 March 2019; pp. 120–126. [Google Scholar] [CrossRef]
- Wigren, T. Adaptive Enhanced Cell-ID Fingerprinting Localization by Clustering of Precise Position Measurements. IEEE Trans. Veh. Technol. 2007, 56, 3199–3209. [Google Scholar] [CrossRef]
- Fang, S.; Lu, B.; Hsu, Y. Learning Location From Sequential Signal Strength Based on GSM Experimental Data. IEEE Trans. Veh. Technol. 2012, 61, 726–736. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, X.; He, S.; Shi, Z. Prospective Positioning Architecture and Technologies in 5G Networks. IEEE Netw. 2017, 31, 115–121. [Google Scholar] [CrossRef]
- 3GPP. Overview of 3GPP Release 8 V0.3.3 (2014-09). Technical Specification (TS) 38.213, 3rd Generation Partnership Project (3GPP), Version 8.3.3. 2014. Available online: http://www.3gpp.org/specifications/releases/72-release-8 (accessed on 10 December 2020).
- 3GPP. 5G; NR; Physical Layer Procedures for Control. Technical Specification (TS) 38.213, 3rd Generation Partnership Project (3GPP). Version 15.6.0. 2019. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3213 (accessed on 20 December 2020).
- Lu, Y.; Koivisto, M.; Talvitie, J.; Valkama, M.; Lohan, E.S. EKF-based and Geometry-based Positioning under Location Uncertainty of Access Nodes in Indoor Environment. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Rastorgueva-Foi, E.; Galinina, O.; Costa, M.; Koivisto, M.; Talvitie, J.; Andreev, S.; Valkama, M. Networking and Positioning Co-Design in Multi-Connectivity Industrial mmW Systems. IEEE Trans. Veh. Technol. 2020, 69, 1. [Google Scholar] [CrossRef]
- Wymeersch, H.; Garcia, N.; Kim, H.; Seco-Granados, G.; Kim, S.; Wen, F.; Fröhle, M. 5G mm Wave Downlink Vehicular Positioning. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 206–212. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Qi, C.; Li, G.Y. High-Resolution Channel Estimation for Frequency-Selective mmWave Massive MIMO Systems. IEEE Trans. Wirel. Commun. 2020, 19, 3517–3529. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.N.; Xu, W.J.; Gao, R.Z.; Cai, Z.T.; Chen, X.Z.; Wu, C.C.; Lo, P. Monopulse Tracking Method for Angle Estimation in 5G Millimeter-Wave Channel Sounder. In Proceedings of the 2020 International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Makung, Taiwan, 26–28 August 2020; pp. 1–2. [Google Scholar] [CrossRef]
- 3GPP. 5G; NR; Physical Channels and Modulation. Technical Specification (TS) 38.211, 3rd Generation Partnership Project (3GPP), Version 15.2.0. 2018. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3213 (accessed on 10 December 2020).
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. Adapt. Antennas Wirel. Commun. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Jamieson, K. ArrayTrack: A Fine-Grained Indoor Location System. In Proceedings of the 10th USENIX Symposium on Networked Systems Design and Implementation (NSDI 13); USENIX Association, Lombard, IL, USA, 2–5 April 2013; pp. 71–84. [Google Scholar]
- Xiong, J.; Sundaresan, K.; Jamieson, K. ToneTrack: Leveraging frequency-agile radios for time-based indoor wireless localization. In Proceedings of the Annual International Conference on Mobile Computing and Networking, MOBICOM, Paris, France, 7 September–11 September 2015; pp. 537–549. [Google Scholar] [CrossRef] [Green Version]
- Vanderveen, M.C.; Van der Veen, A.; Paulraj, A. Estimation of multipath parameters in wireless communications. IEEE Trans. Signal Process. 1998, 46, 682–690. [Google Scholar] [CrossRef] [Green Version]
- Tan, B.; Chetty, K.; Jamieson, K. ThruMapper: Through-wall building tomography with a single mapping robot. In Proceedings of the 18th International Workshop on Mobile Computing Systems and Applications, HotMobile 2017, Sonoma, CA, USA, 21–22 February 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Fessler, J.; Hero, A. Space-Alternating Generalized Expectation-Maximization Algorithm. IEEE Trans. Signal Process. 1994, 42, 2664–2677. [Google Scholar] [CrossRef] [Green Version]
- Fleury, B.H.; Tschudin, M.; Heddergott, R.; Dahlhaus, D.; Pedersen, K.I. Channel parameter estimation in mobile radio environments using the SAGE algorithm. IEEE J. Sel. Areas Commun. 1999, 17, 434–450. [Google Scholar] [CrossRef]
- Feder, M.; Weinstein, E. Parameter Estimation of Superimposed Signals Using the EM Algorithm. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 477–489. [Google Scholar] [CrossRef] [Green Version]
- 3GPP. 5G; NR; Physical Channels and Modulation. Technical Specification (TS) 38.211, 3rd Generation Partnership Project (3GPP), Version 1.0.0. 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3213 (accessed on 13 December 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Carrier frequency | The n78 3.5 GHz in Frequency Range 1 (FR1, sub-6 GHz) frequency band, the most common 5G band in deployed networks. Furthermore, this band is more suitable for the outdoor scenarios concerned in this work. |
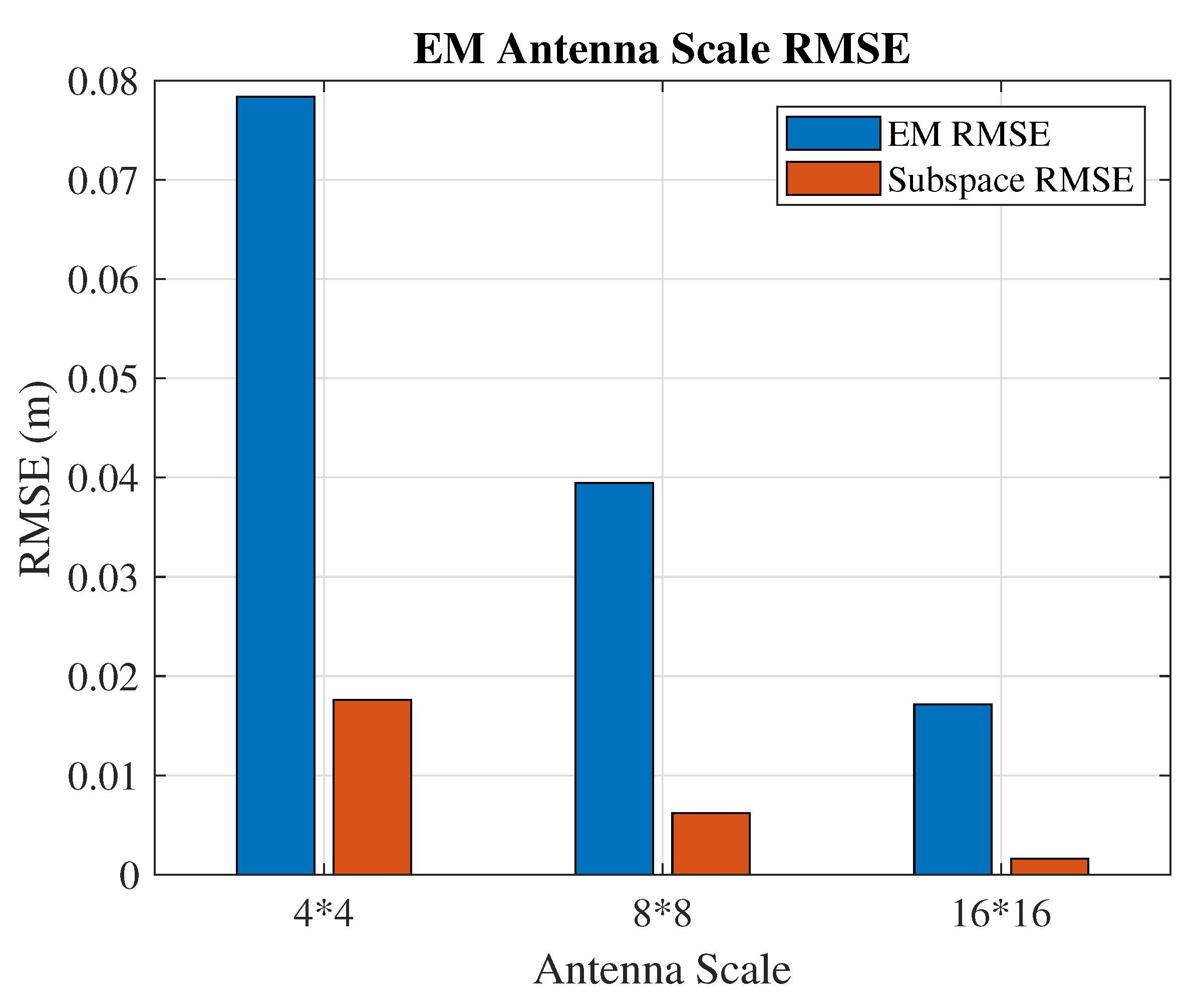
| Receiving array | Square shaped, half wavelength spacing URA is used. The , , and configurations are used to test the array scale impact on the angle estimation performance. |
| Bandwidth | Though the supported channel bandwidth of n78 band is from 10 to 100 MHz, different values are used in this paper to test the bandwidth impact on the delay estimation performance. |
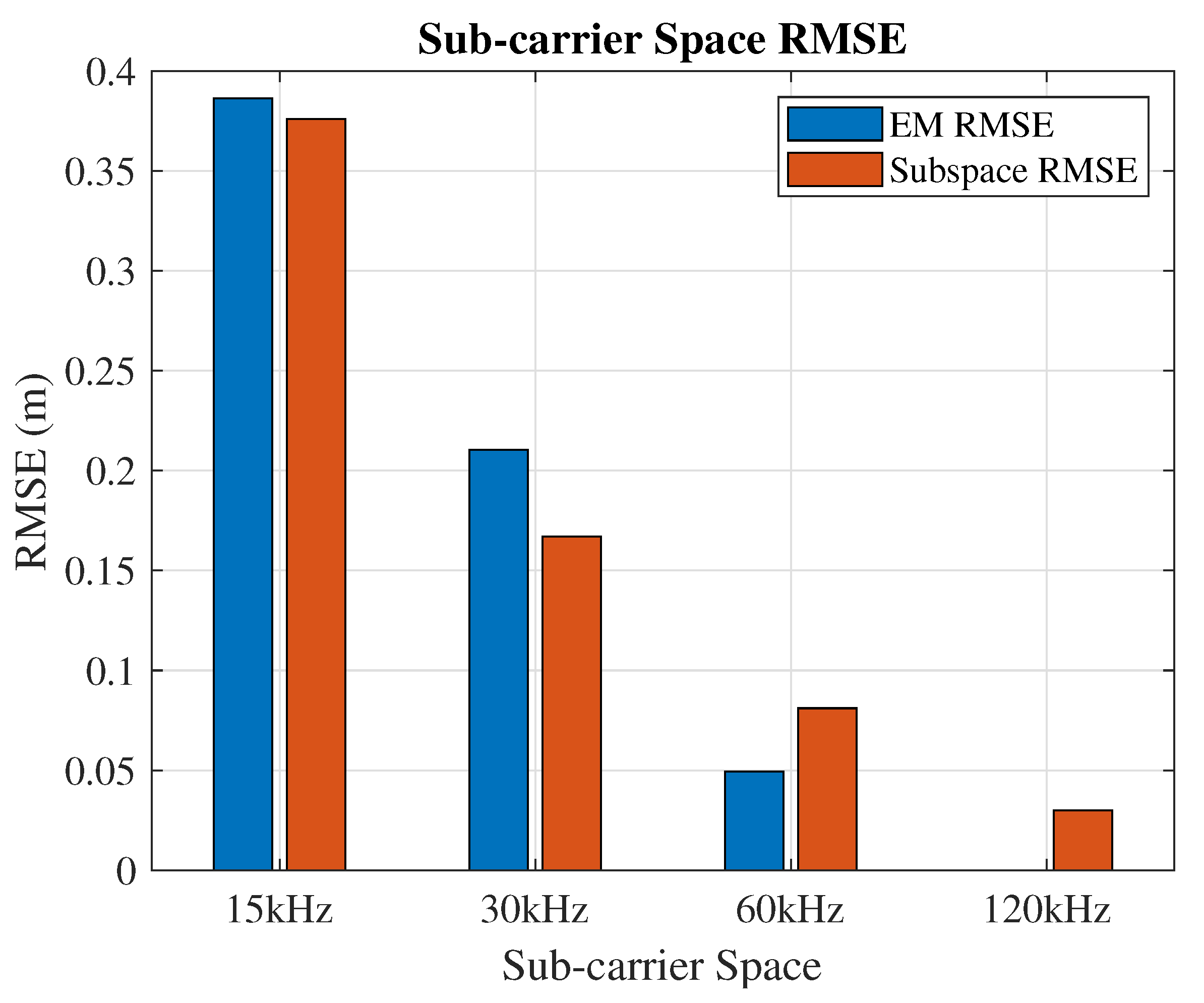
| Sub-carrier interval | The default subcarrier spaces 15 kHz, 30 kHz, 60 kHz, and 120 kHz are used to test the bandwidth impact on the positioning performance. |
| Modulation | The SRS is an OFDM signal. However, it is not a data payload. Thus, the symbols allocated to OFDM subcarriers are not Zadoff–Chu code elements, which do not have any modulation. |
| Channel model | The additive white Gaussian noise (AWGN) complex channel is used. |
| Duplex mode | Time-division duplexing (TDD) is the most used duplex mode in the n78 band. The positioning methods in this work are neutral to the duplex mode. |
| 42 | The total bandwidth configuration index to the maximum available RBs can be used. | |
| 2 | The transmission bandwidth selecting index, used with for selecting the RBs for the SRS. | |
| 2 | The comb structure, which indicates the number of subcarrier gaps between two SRS subcarriers. | |
| 0 | The symbols’ start position index carried in the RRC message. Controls the SRS starting position range from the 8th to 13th OFDM symbol. | |
| 0 | The SRS subcarrier starting position. Frequency hopping and sequence hopping are disabled in the simulations. The subcarrier mapping starts from the first subcarrier. |
| Angle step | 0.1 degrees | The AoA searching step in the EM and subspace-based estimation process. |
| Time step | 1 ns | The ToA searching step. |
| Observation time | 20 ms | Observation time set as 20 ms to enhance the performance and that equals 20 time slots when the subcarrier spacing is 15 kHz. |
| Sampling frequency | 60 MHz | Assuming a 60 MHz bandwidth. Sixteen RBs are allocated to the UEs, and the sampling frequency can be selected as 60 Mhz. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Tan, B.; Wang, W.; Lohan, E.S. A Comparative Study of 3D UE Positioning in 5G New Radio with a Single Station. Sensors 2021, 21, 1178. https://doi.org/10.3390/s21041178
Sun B, Tan B, Wang W, Lohan ES. A Comparative Study of 3D UE Positioning in 5G New Radio with a Single Station. Sensors. 2021; 21(4):1178. https://doi.org/10.3390/s21041178
Chicago/Turabian StyleSun, Bo, Bo Tan, Wenbo Wang, and Elena Simona Lohan. 2021. "A Comparative Study of 3D UE Positioning in 5G New Radio with a Single Station" Sensors 21, no. 4: 1178. https://doi.org/10.3390/s21041178
APA StyleSun, B., Tan, B., Wang, W., & Lohan, E. S. (2021). A Comparative Study of 3D UE Positioning in 5G New Radio with a Single Station. Sensors, 21(4), 1178. https://doi.org/10.3390/s21041178