
An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications


Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Paper Contributions
1.3. Paper Contributions
2. Modeling of Individual Array Structures
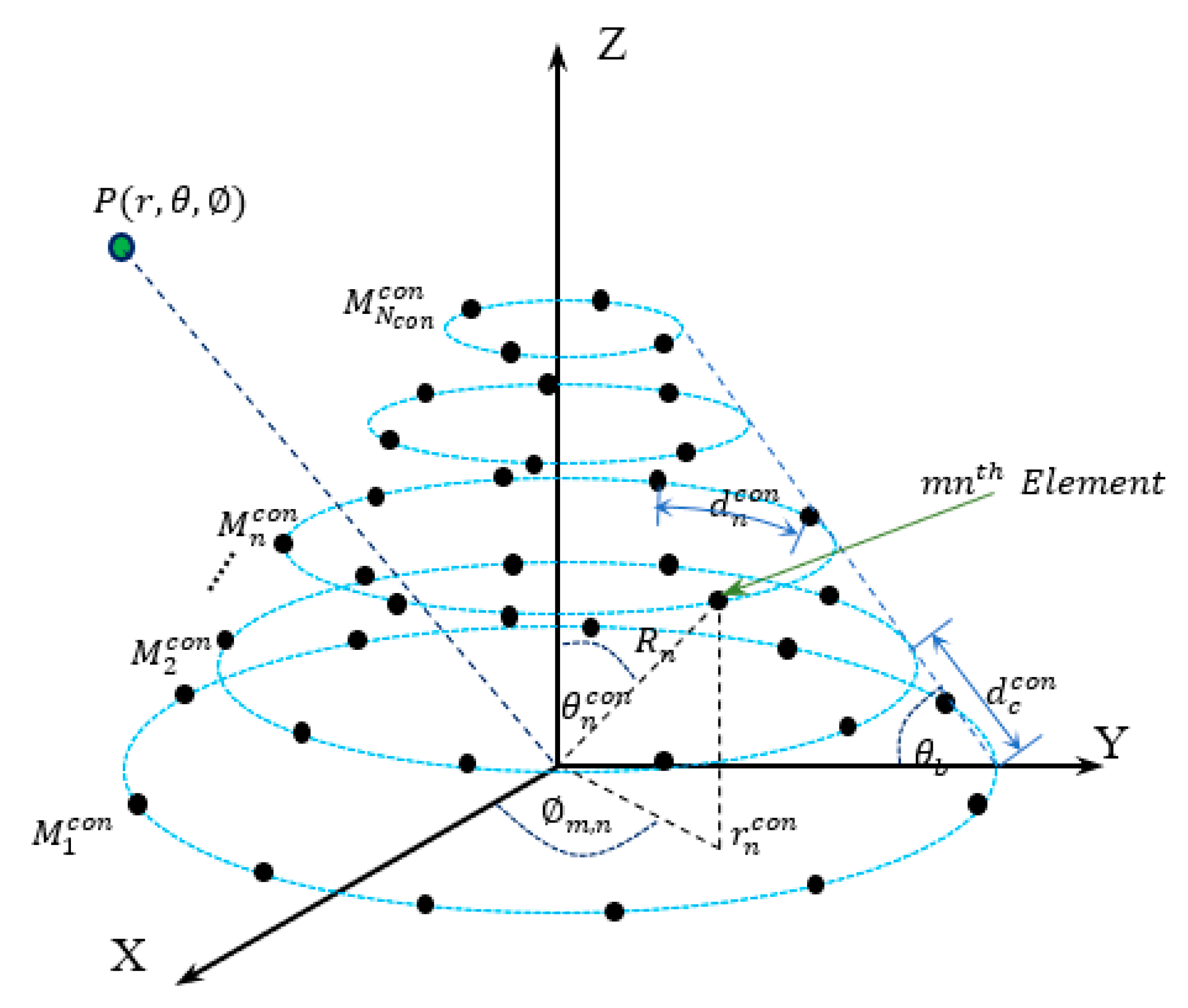
2.1. Uniform Conical Array
2.2. Design of Uniform Cylindrical and Concentric Circular Arrays Using Uniform Conical Array Parameters
2.3. General Array Steering Vector
- is the signal wavelength,
- ,
- ,
- ,
- ,
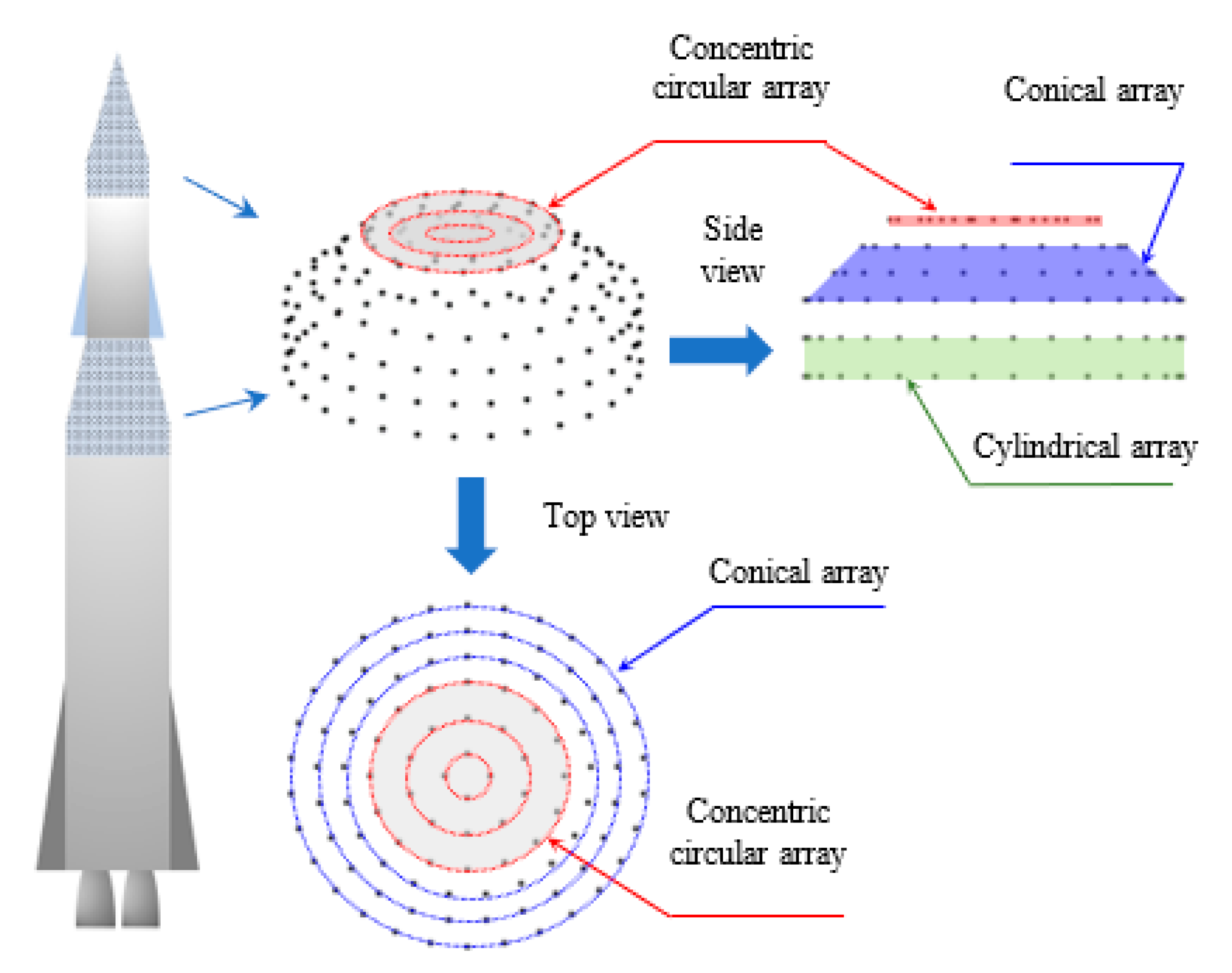
3. Conformal Stacked Cylindrical Conical Concentric Circular (CSC4) Array Structure and Beamforming
3.1. Structure and Steering Vector of CSC4
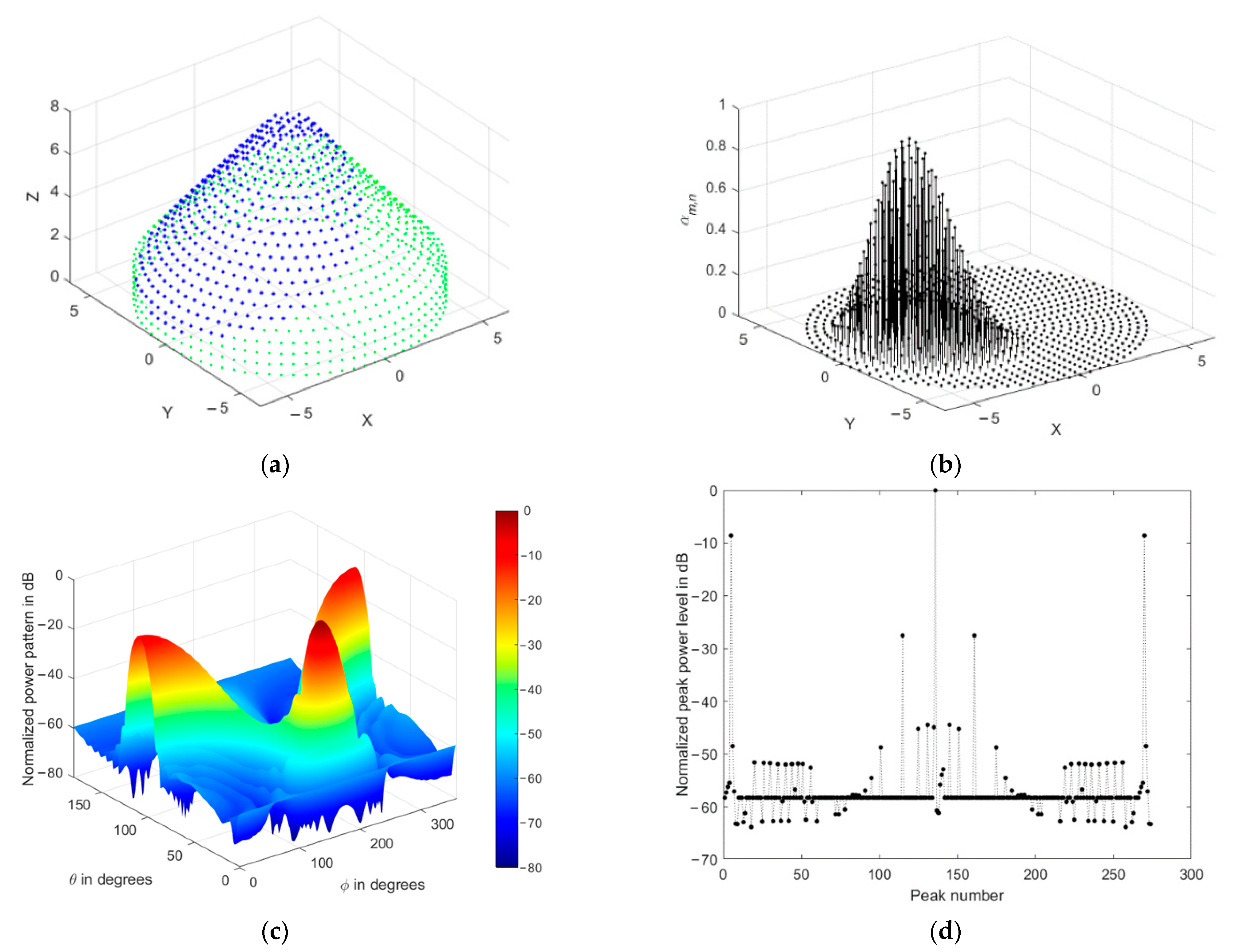
3.2. Uniformly Fed CSC4 Array Performance
3.3. Spatial Smoothing of CSC4 Power Pattern
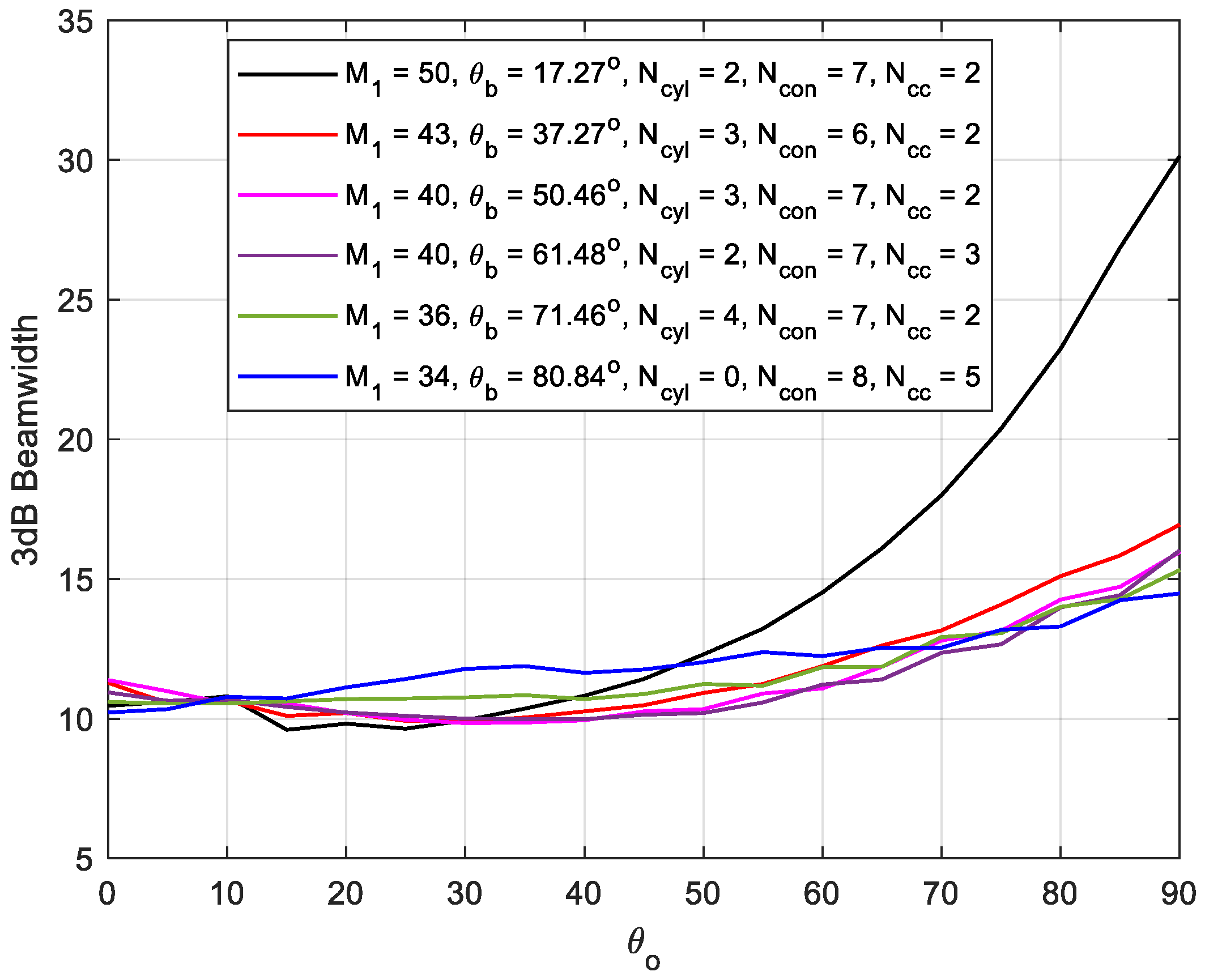
3.4. 3 dB Beamwidth Performance of CSC4 Array
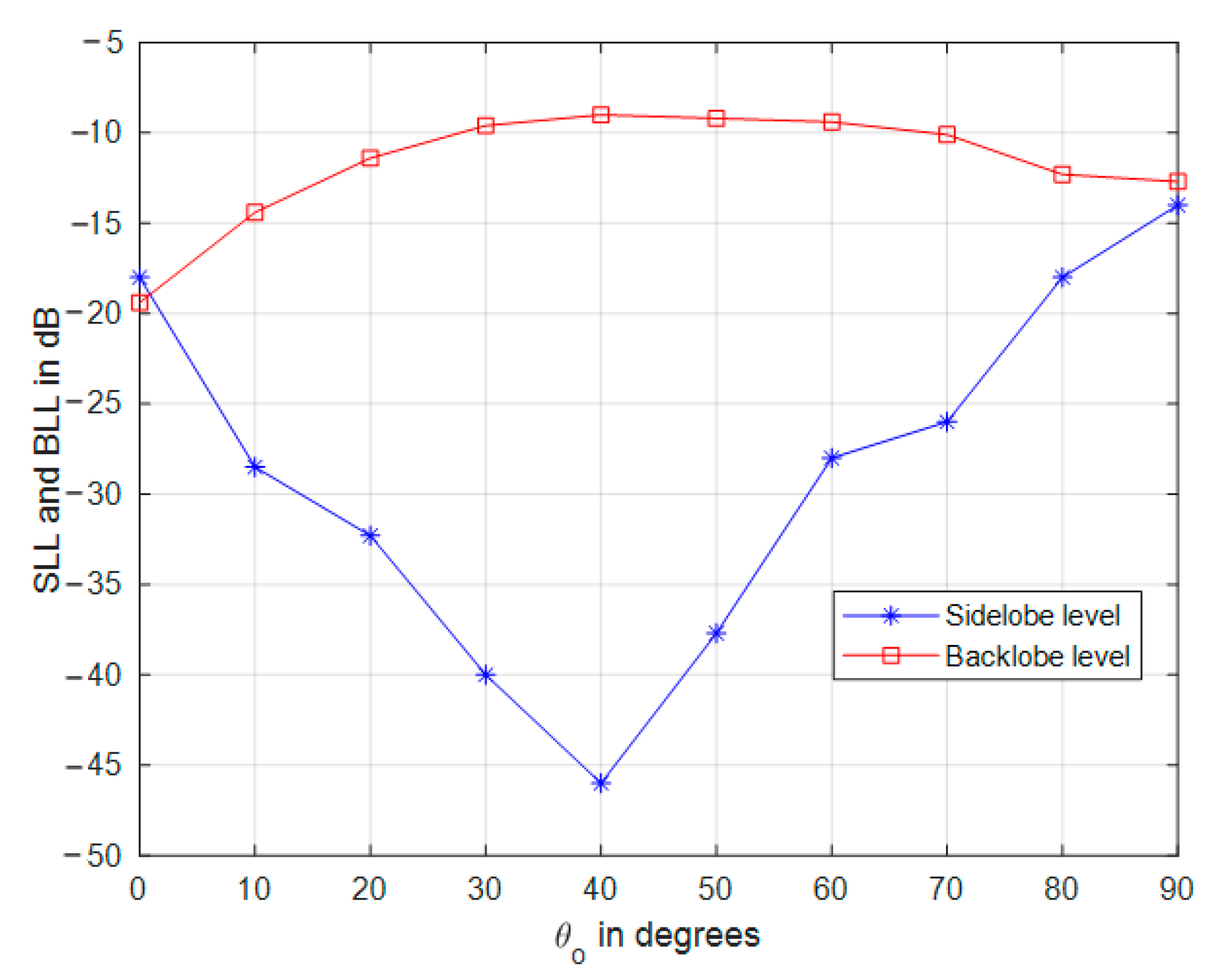
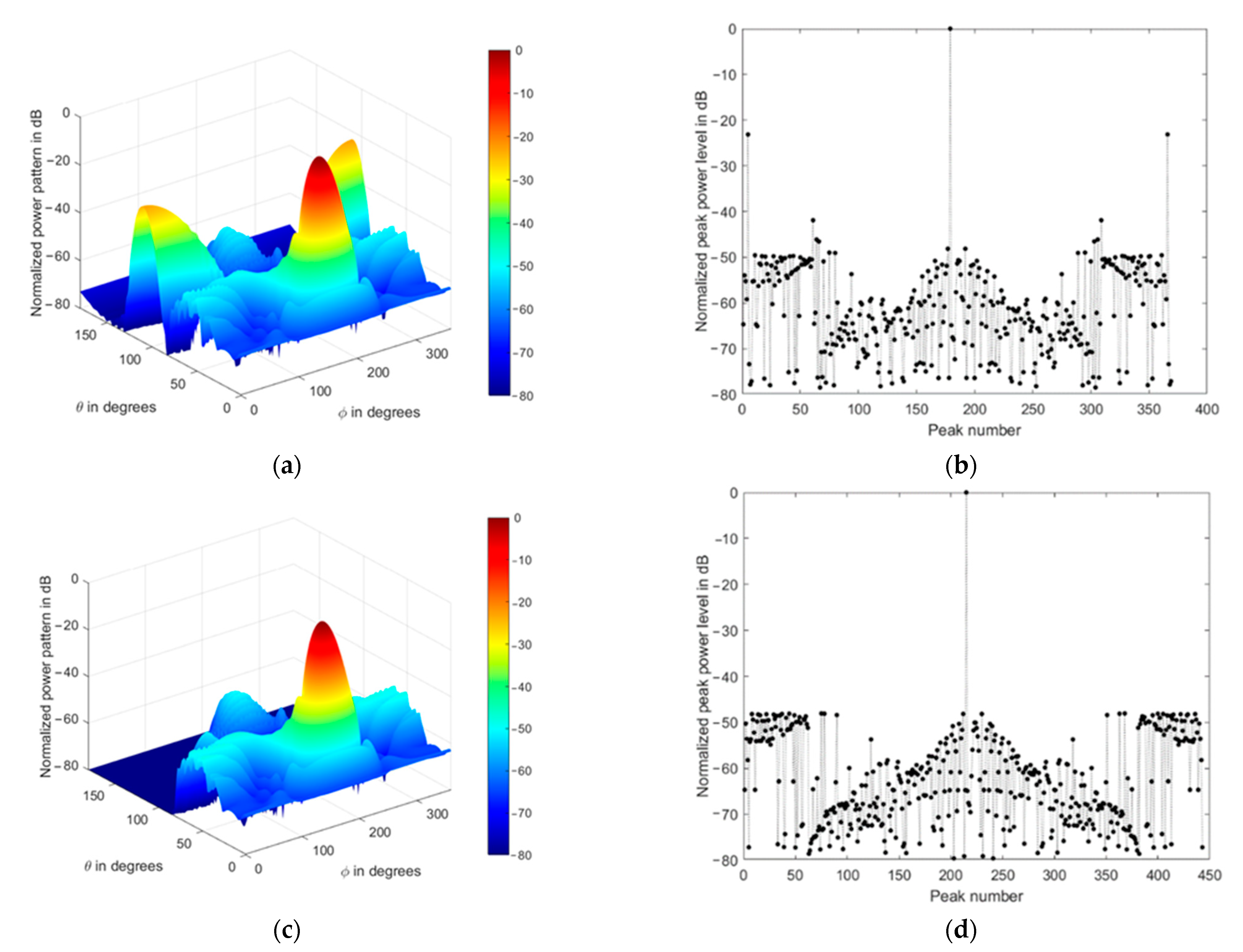
4. Frontal Mainlobe-Oriented Partial CSC4 Array Beamforming
5. Impact of Nonisotropic Antenna Elements on the Radiation Pattern
5.1. Performance of CSC4 Array Using Crossed Dipole Antennas with Ground Plane
5.2. Comparsion with Relevant Conformal Array Designs
6. Practical Challenges Discussion
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kapusuz, K.Y.; Şen, Y.; Bulut, M.; Karadede, İ.; Oğuz, U. Low-profile scalable phased array antenna at Ku-band for mobile satellite communications. In Proceedings of the 2016 IEEE International Symposium on Phased Array Systems and Technology (PAST), Waltham, MA, USA, 18–21 October 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Albagory, Y. An Efficient WBAN Aggregator Switched-Beam Technique for Isolated and Quarantined Patients. AEU Int. J. Electron. Commun. 2020, 123, 153322. [Google Scholar] [CrossRef]
- Albagory, Y. Direction-independent and self-reconfigurable spherical-cap antenna array beamforming technique for massive 3D MIMO systems. Wirel. Netw. 2020, 26, 6111–6123. [Google Scholar] [CrossRef]
- Chen, C.; Zheng, H. Design of a dual-band conformal antenna on a cone surface for missile-borne. In Proceedings of the 2017 Sixth Asia-Pacific Conference on Antennas and Propagation (APCAP), Xi’an, China, 16–19 October 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Khalil, H.; Rafique, U.; Ahmed, M.M.; Rahman, S.; Nazar, W. A Comparative Study of Conformal Antenna Arrays for Aerodynamic Applications. In Proceedings of the 2019 Photonics & Electromagnetics Research Symposium—Fall (PIERS—Fall), Xiamen, China, 17–20 December 2019; pp. 3211–3217. [Google Scholar] [CrossRef]
- Morton, T.E.; Pasala, K.M. Performance analysis of conformal conical arrays for airborne vehicles. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 876–890. [Google Scholar] [CrossRef]
- Ding, J.; Mei, H.; Zhang, H.; Liu, W. Frontier Progress of Unmanned Aerial Vehicles Optical Wireless Technologies. Sensors 2020, 20, 5476. [Google Scholar] [CrossRef]
- Shen, F.; Mu, J.; Guo, K.; Guo, Z. Generating Circularly Polarized Vortex Electromagnetic Waves by the Conical Conformal Patch Antenna. IEEE Trans. Antennas Propag. 2019, 67, 5763–5771. [Google Scholar] [CrossRef]
- Peng, Z.; Chaowei, L.; Qiang, W. The Design and Simulation of Millimeter Wave Conformal Microstrip Antenna Patch on Conical Surface. In Proceedings of the 2008 Global Symposium on Millimeter Waves, Nanjing, China, 21–24 April 2008; pp. 394–396. [Google Scholar] [CrossRef]
- Bai, B.; Zhang, Z.; Li, X.; Sun, C.; Liu, Y. Integration of Microstrip Slot Array Antenna with Dye-Sensitized Solar Cells. Sensors 2020, 20, 6257. [Google Scholar] [CrossRef]
- Liu, M.; Feng, Z.; Wu, Q. Design of a Millimeter-Wave Conformal Low Sidelobe Microstrip Antenna Array on A Cone Surface. In Proceedings of the 2008 China-Japan Joint Microwave Conference, Shanghai, China, 10–12 September 2008; pp. 121–124. [Google Scholar] [CrossRef]
- Liu, M.; Wu, Q.; Feng, Z. A millimeter-wave 4 × 4 conical conformal and dual-band microstrip array. In Proceedings of the 2008 Asia-Pacific Microwave Conference, Macau, China, 16–20 December 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Fu, J.H.; Zhang, S.Q.; Wu, Q.; Liu, M. Cylindrical conformal broaden microstrip circularly polarized antenna arrays. In Proceedings of the 2010 Asia-Pacific International Symposium on Electromagnetic Compatibility, Beijing, China, 12–16 April 2010; pp. 1337–1339. [Google Scholar] [CrossRef]
- Xuan, X.; Yao, F.; Tian, X. Conformal microstrip circularly polarization Antenna array. In Proceedings of the 2013 Proceedings of the International Symposium on Antennas & Propagation, Nanjing, China, 23–25 October 2013; pp. 245–247. [Google Scholar]
- Chenhu, G.; Geng, J.; Zhou, H.; Li, J.; Liang, X.; Zhu, W.; Jin, R.; Ziolkowski, R.W. Truncated Circular Cone Slot Antenna Array That Radiates a Circularly Polarized Conical Beam. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 2574–2577. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Jin, Z.; Montisci, G.; Liu, Y.; He, X.; Casula, G.A.; Mazzarella, G. Design Equations for Cylindrically Conformal Arrays of Longitudinal Slots. IEEE Trans. Antennas Propag. 2016, 64, 80–88. [Google Scholar] [CrossRef]
- Aboul-Seoud, A.K.; Hafez, A.S.; Hamed, A.M.; Abd-El-Latif, M. A conformal conical phased array antenna for modern radars. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Jaeck, V.; Bernard, L.; Mahdjoubi, K.; Sauleau, R.; Collardey, S.; Pouliguen, P.; Potier, P. A Switched-Beam Conformal Array with a 3-D Beam Forming Capability in C-Band. IEEE Trans. Antennas Propag. 2017, 65, 2950–2957. [Google Scholar] [CrossRef]
- Xu, H.; Cui, J.; Duan, J.; Zhang, B.; Tian, Y. Versatile Conical Conformal Array Antenna Based on Implementation of Independent and Endfire Radiation for UAV Applications. IEEE Access 2019, 7, 31207–31217. [Google Scholar] [CrossRef]
- Xia, Y.; Muneer, B.; Zhu, Q. Design of a Full Solid Angle Scanning Cylindrical-and-Conical Phased Array Antennas. IEEE Trans. Antennas Propag. 2017, 65, 4645–4655. [Google Scholar] [CrossRef]
- Ponomarev, L.I.; Vasin, A.A.; Terekhin, O.V.; Turko, L.S. Airborne Conical Antenna Arrays. J. Commun. Technol. Electron. 2020, 65, 1129–1139. [Google Scholar] [CrossRef]
- Zou, L.; Lasenby, J.; He, Z. Pattern analysis of conformal array based on geometric algebra. IET Microw. Antennas Propag. 2011, 5, 1210–1218. [Google Scholar] [CrossRef]
- Xie, P.; Chen, K.; He, Z. Synthesis of thinned conical arrays using simulated annealing algorithm. In Proceedings of the 2009 International Conference on Communications, Circuits and Systems, Milpitas, CA, USA, 23–25 July 2009; pp. 756–758. [Google Scholar] [CrossRef]
- Jaeck, V.; Bernard, L.; Mahdjoubi, K.; Sauleau, R.; Collardey, S.; Pouliguen, P.; Potier, P. A conical phased array for reliable and discrete communications. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 13–17 April 2015; pp. 1–5. [Google Scholar]
- Xu, H.; Zhang, B.Z.; Duan, J.P.; Cui, J.; Xu, Y.; Tian, Y.; Yan, L.; Xiong, M.; Jia, Q. Wide Solid Angle Beam-Switching Conical Conformal Array Antenna with High Gain for 5G Applications. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 2304–2308. [Google Scholar] [CrossRef]
- Li, Y.; Yang, F.; Ouyang, J.; Yang, P. Synthesis of Conical Conformal Array Antenna Using Invasive Weed Optimization Method. ACES J. 2013, 28, 11. [Google Scholar]
- Angelilli, M.; Infante, L.; Pacifici, P. A family of Secondary Surveillance Radars based on Conformal Antenna array geometries. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1681–1684. [Google Scholar] [CrossRef]
- Bai, Y.; Xiao, S.; Liu, C.; Wang, B. A Hybrid IWO/PSO Algorithm for Pattern Synthesis of Conformal Phased Arrays. IEEE Trans. Antennas Propag. 2013, 61, 2328–2332. [Google Scholar] [CrossRef]
- Cong, L.; Xu, L.; Li, J.; Wang, T.; Han, Q. The conical conformal MEMS quasi-end-fire array antenna. Mod. Phys. Lett. B 2017, 31, 1750115. [Google Scholar] [CrossRef] [Green Version]
- Leone, G.; Munno, F.; Pierri, R. Inverse Source on Conformal Conic Geometries. IEEE Trans. Antennas Propag. 2020. [Google Scholar] [CrossRef]
- Braaten, B.D.; Roy, S.; Irfanullah, I.; Nariyal, S.; Anagnostou, D.E. Phase-Compensated Conformal Antennas for Changing Spherical Surfaces. IEEE Trans. Antennas Propag. 2014, 62, 1880–1887. [Google Scholar] [CrossRef]
- Randy, L.H. Antenna Arrays: A Computational Approach; Wiley-IEEE Press: Hoboken, NJ, USA, 2010; ISBN 978-0-470-93743-3. [Google Scholar]
- Dessouky, M.; Sharshar, H.; Albagory, Y. An approach for Dolph-Chebyshev uniform concentric circular arrays. J. Electromagn. Waves Appl. 2007, 21, 6. [Google Scholar] [CrossRef]
- Aljahdali, S.; Nofal, M.; Albagory, Y. A modified array processing technique based on Kaiser window for concentric circular arrays. In Proceedings of the 2012 International Conference on Multimedia Computing and Systems, ICMCS 2012, Tangier, Morocco, 10–12 May 2012. [Google Scholar]
- Dessouky, M.I.; Sharshar, H.A.; Albagory, Y.A. Optimum normalized-Gaussian tapering window for side lobe reduction in uniform concentric circular arrays. Prog. Electromagn. Res. 2007, 69, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Dessouky, M.; Sharshar, H.; Albagory, Y. A novel tapered beamforming window for uniform concentric circular arrays. J. Electromagn. Waves Appl. 2006, 20, 2077–2089. [Google Scholar] [CrossRef]
- Nofal, M.; Aljahdali, S.; Albagory, Y. Simplified sidelobe reduction techniques for concentric ring arrays. Wirel. Pers. Commun. 2013, 71, 2981–2991. [Google Scholar] [CrossRef]
- Buell, K.; Mosallaei, H.; Sarabandi, K. Metamaterial Insulator Enabled Superdirective Array. IEEE Trans. Antennas Propag. 2007, 55, 1074–1085. [Google Scholar] [CrossRef]
- Singh, H.; Sneha, H.L.; Jha, R.M. Mutual Coupling in Phased Arrays: A Review. Int. J. Antennas Propag. 2013, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Inami, K.; Sawaya, K.; Mushiake, Y. Mutual coupling between rectangular slot antennas on a conducting concave spherical surface. IEEE Trans. Antennas Propag. 1982, 30, 927–933. [Google Scholar] [CrossRef]
- Ta, S.X.; Park, I.; Ziolkowski, R.W. Crossed Dipole Antennas: A review. IEEE Antennas Propag. Mag. 2015, 57, 107–122. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|
| 80.84° | 71.44° | 61.48° | 50.46° | 37.27° | 17.27° | |
| 1 | 2 | 3 | 4 | 5 | 6 |
| Array Type | Design Parameters |
|---|---|
| Conical | , , , |
| Cylindrical | , , , |
| Concentric Circular | , , |
| Array Parameter Values | ||||||
|---|---|---|---|---|---|---|
| 40 | 3 | 7 | 2 | 334 | 50.46° | |
| (0°,180°), (30°,180°), (60°,180°), (90°,180°) | ||||||
| Array Structure | Sidelobe Level (dB) | Backlobe Level (dB) | Beamwidth (Degrees) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 0° | 45° | 90° | 0° | 45° | 90° | 0° | 45° | 90° | |
| Conical array | −24 | −32 | −32 | −18 | −17 | −11 | 13° | 15° | 18° |
| Cylindrical array | −8 | −9 | −21 | 0 | −14 | −9 | 7° | 8° | 23° |
| Concentric circular array | −37 | −40 | −40 | 0 | 0 | −15 | 11° | 14° | 48° |
| CSC4 | −20 | −19 | −16 | −18 | −16 | −13 | 11° | 10° | 14° |
| Partial CSC4 | −19 | −42 | −14 | −20 | −10 | −13 | 10° | 10° | 14° |
| Simulation Parameter | Value |
|---|---|
| Operating frequency | 3.5 GHz |
| Wavelength, λ | 85.7 mm |
| Antenna elements interseparation distance | |
| Number of elements of the base cylindrical array | 80 |
| Conical array base angle | |
| Number of cylindrical arrays | 3 |
| Number of conical arrays | 18 |
| Number of concentric circular array | 2 |
| Partial CSC4 array radius, | |
| Number of active elements in the partial CSC4 array | 334 |
| Dipole length | 40.81 mm |
| Dipole width | 1.71 mm |
| Dipole feeding location | Center |
| Ground plane material | PEC |
| Ground plane dimensions | |
| Separation between the crossed dipole and ground plane | |
| Dielectric material | Air |
| Array base diameter | 1091 mm |
| Array height | 857 mm |
| Comparison Item | This Work | Ref. [6] | Ref. [20] |
|---|---|---|---|
| General array structure | Concentric circular, conical, and cylindrical | Conical only | Conical and cylindrical |
| Mainlobe-oriented partial array formation | Yes | Not examined | No |
| Maximum amplitude always at the nearest element to the mainlobe direction | Yes | No | No |
| Elevation scanning range at almost constant beamwidth | at , at | ||
| Beamwidth variation over scanning range | |||
| Azimuth scanning range | |||
| Beamwidth at broadside direction | Determined at the same total number of elements and base radius of the compared array | Proposed array beamwidth = at 117 elements and with cylindrical base radius of | Proposed array beamwidth = at 88 elements and with cylindrical base radius of 6.9 |
| Highest sidelobe level relative to a mainlobe formed at the array broadside direction | −40 dB | −30 dB | −15.5 dB |
| Mainlobe gain in dB | 26.04 dB | 24 dB | 20 dB |
| Antenna elements feeding method | Adaptive cosine exponent tapered amplitude feeding | Genetic algorithm | Constant tapered amplitude feeding |
| Element design | Crossed dipole antenna with PEC ground plane | Slots on conical surface | Microstrip antenna |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albagory, Y. An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications. Sensors 2021, 21, 1362. https://doi.org/10.3390/s21041362
Albagory Y. An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications. Sensors. 2021; 21(4):1362. https://doi.org/10.3390/s21041362
Chicago/Turabian StyleAlbagory, Yasser. 2021. "An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications" Sensors 21, no. 4: 1362. https://doi.org/10.3390/s21041362