
Improving the Detection of the Contact Point in Active Sensing Antennae by Processing Combined Static and Dynamic Information



Abstract
:1. Introduction
2. Related Work
- It does not require a small payload placed at the tip of the antenna. This will allow the antenna to move faster and obtain more information about the object surface in a given period of time, since the load to be moved by the actuators will be reduced.
- The accuracy of the estimation must be better than the accuracy provided by the aforementioned methods, i.e., a relative error that is much lower than must be attained.
- The algorithm must be sufficiently fast and reliable to be used in a real prototype.
3. Materials
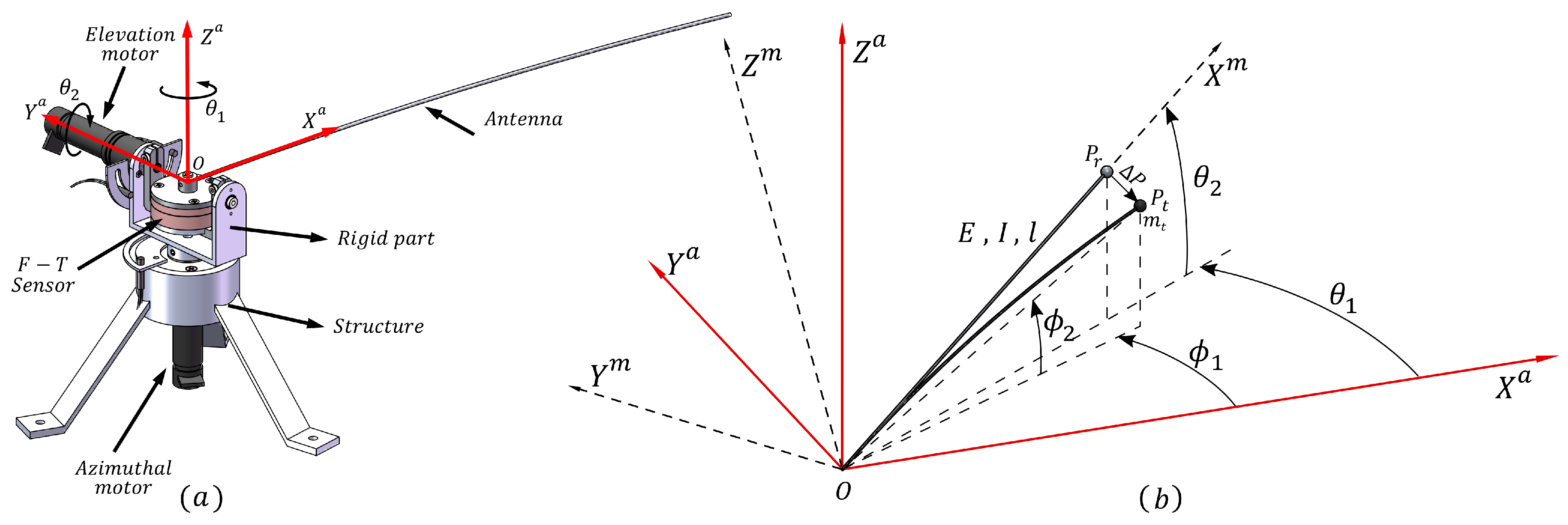
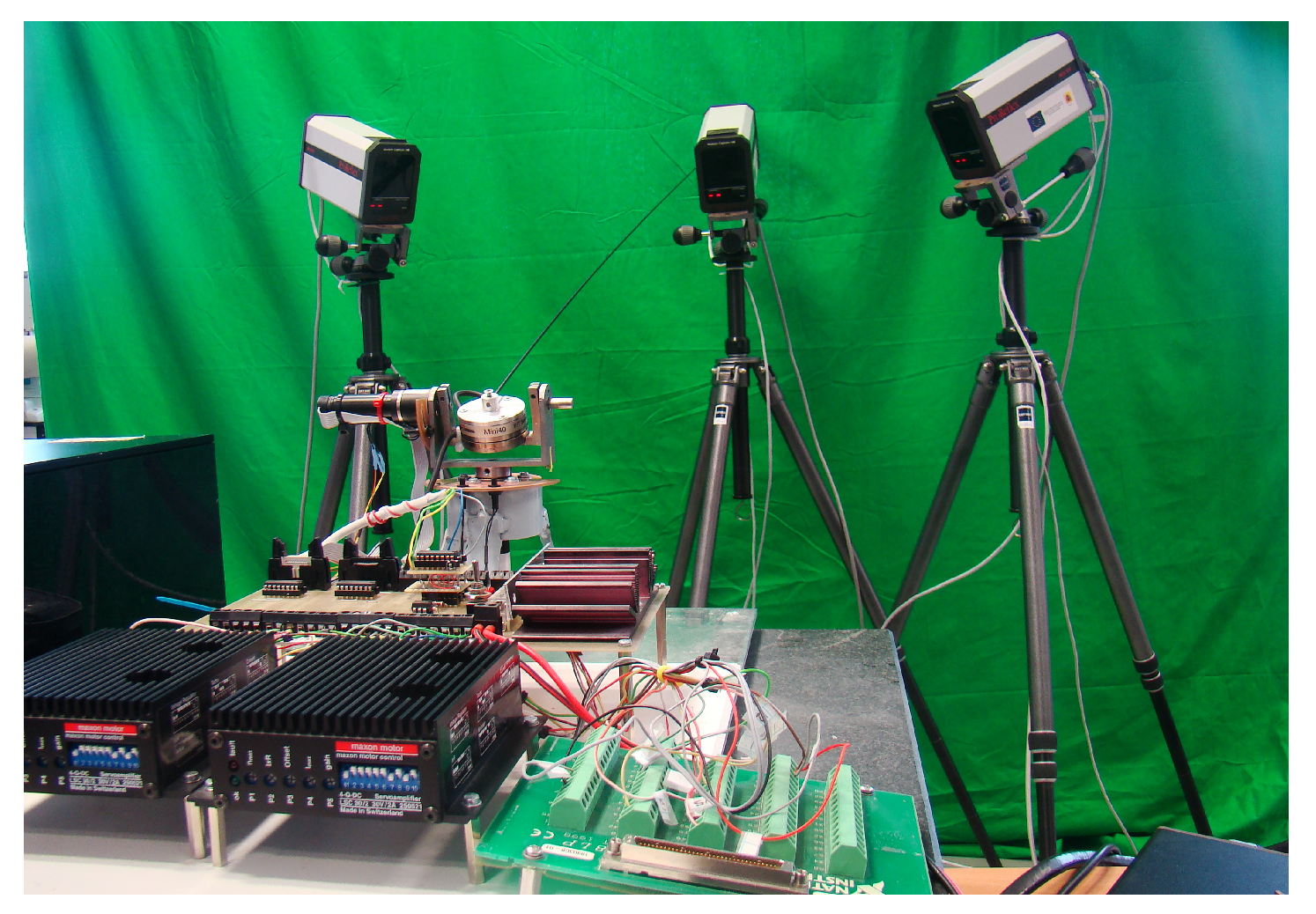
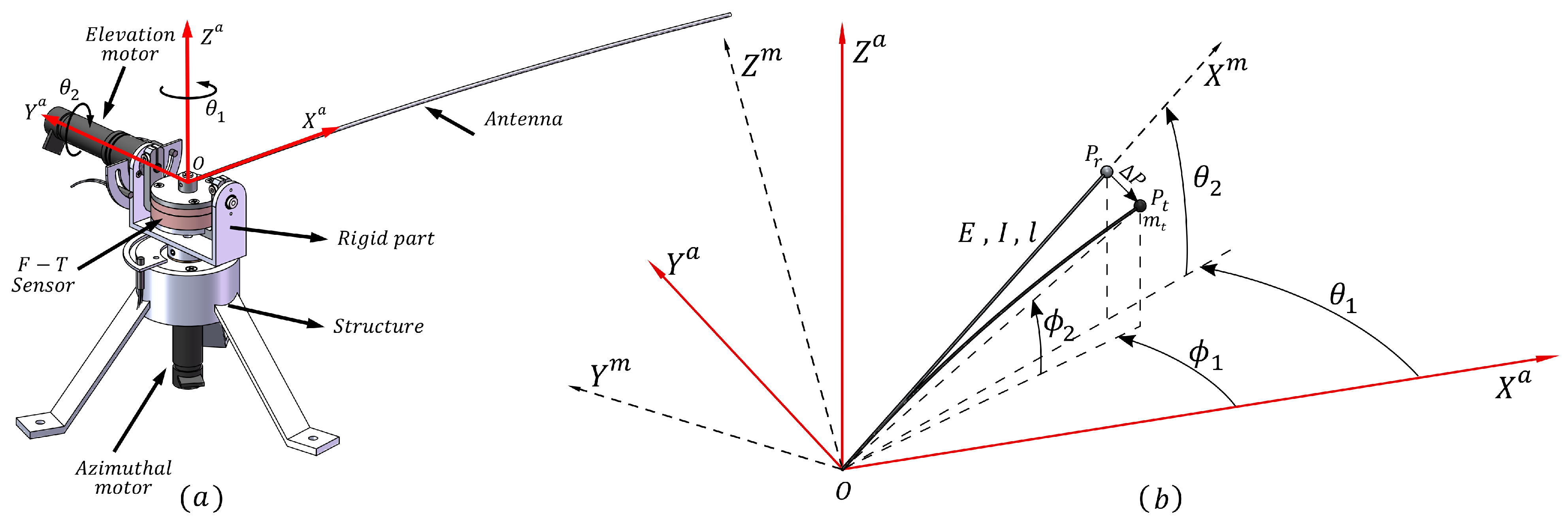
3.1. Experimental Setup
3.2. Actuator Dynamics
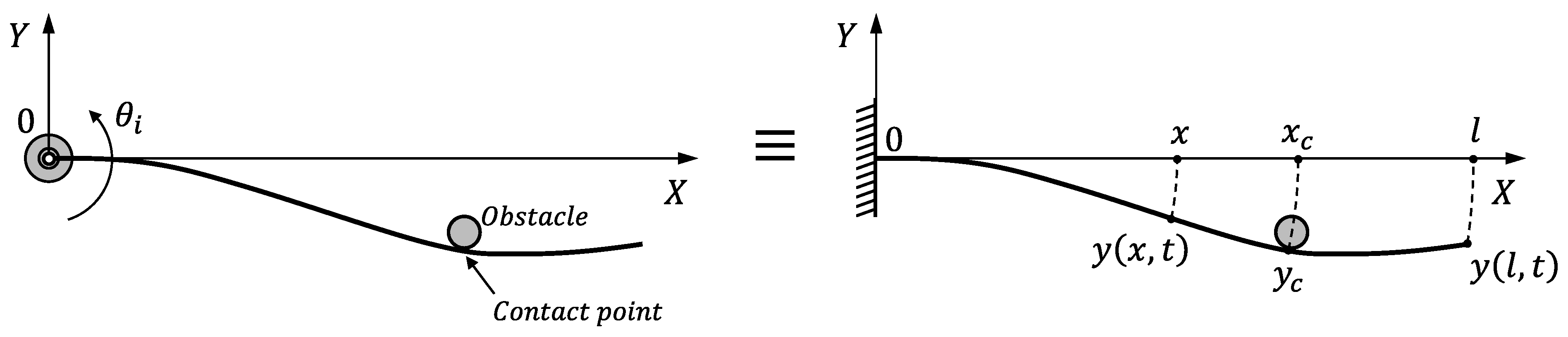
3.3. Planar Dynamics of the Contact Sensing
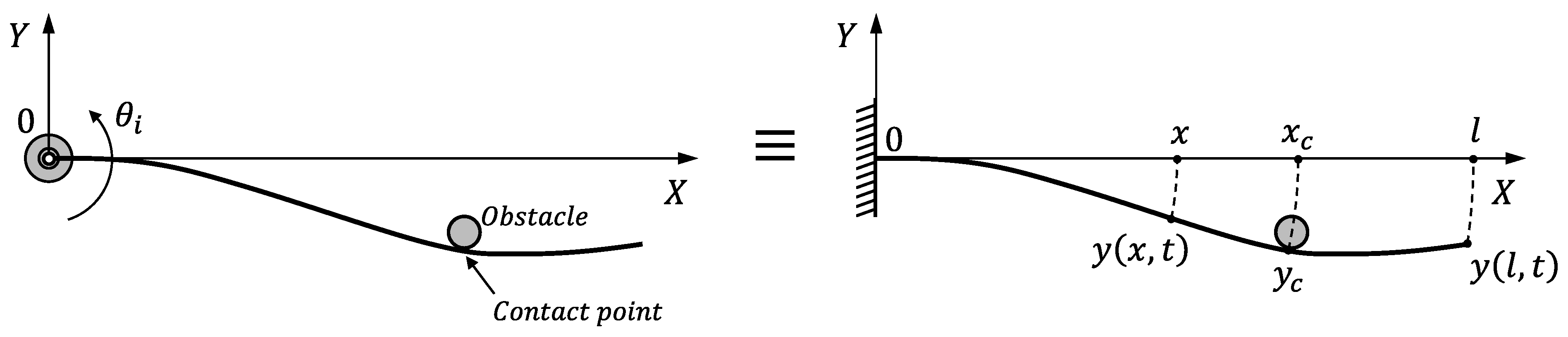
- The beam deflection is limited to of the total beam length in order to obtain a linear beam deflection. In this case, deflections y are small when compared to the corresponding x values. The deflected abscissa, therefore, has approximately the same value as the undeflected abscissa, , and both x and y become the coordinates of a point of the deflected beam expressed in the frame XY.This assumption is justified because: (a) the figure of , needed to assume a geometrically linear deflection, is an approximate value commonly used in studies of beam deflections and vibrations (a justification of this value can be found in [28]); (b) though free movements are performed carrying out fast trajectories, deflections are lower than this limit because the antenna is very lightweight, and then, the inertial forces are low; and (c) in contact mode, the force exerted by the antenna on the object is programmed to be high enough to allow a reliable estimation of the contact point, but low enough to prevent exceeding this deflection limit.
- The antenna was manufactured to have a uniform cross-section.
- Since the antenna is a very slender beam, rotatory inertia, shear deformation and internal friction are ignored.
- The total mass of the antenna is much smaller than that of the contacted object, and the object does not, therefore, move during the sensing process.
- Regarding the antenna dynamics in the free movement, it was demonstrated in [27] by carrying out extensive simulations and experimentation that, since the linear density of the beam is sufficiently small: (a) the vibration associated with the first mode is much more relevant than the vibrations associated with the other modes; (b) the Coriolis and centripetal torques are much smaller than the inertial torques, and they can, therefore, be neglected; (c) the previous item allows us to assume that the azimuthal and attitude dynamics are approximately decoupled; and (d) the gravitational torque is significant in the attitude component of the movements.
- The contacted object is rigid.
- The contact is produced at a single point, as was commonly assumed in the previous works.
- Sliding of the contacting bodies relative to one another is negligible once a specific value of the pushing force has been attained, i.e., if the pushing force of the antenna on the object surpasses a specific value, slipping is prevented.
- Since there is no deformation in the X axis of the antenna, longitudinal contact forces do not influence the dynamics modeled.
- The linear density of the beam is sufficiently small, and the contact force is sufficiently large to be able to assume that gravity influences neither the vibration modes of the beam nor its steady-state deflection. In particular, Section 5.6.2 checks that the first vibration frequency, which is the one used in this work, does not change because of the effect of gravity.
3.4. Steady-State Measurements
4. Methods
- The antenna moves freely in 3D space in a motor servo-controlled manner until it hits an object.
- An algorithm estimates the instant at which the antenna collides with the object.
- After contact has been made: (1) the motors of the sensing antenna keep moving in a servo-controlled manner in an attempt to follow the commanded trajectory; and (2) the reaction force of the object on the antenna, , and the coupling torque, , keep increasing as a consequence of the motor movement.
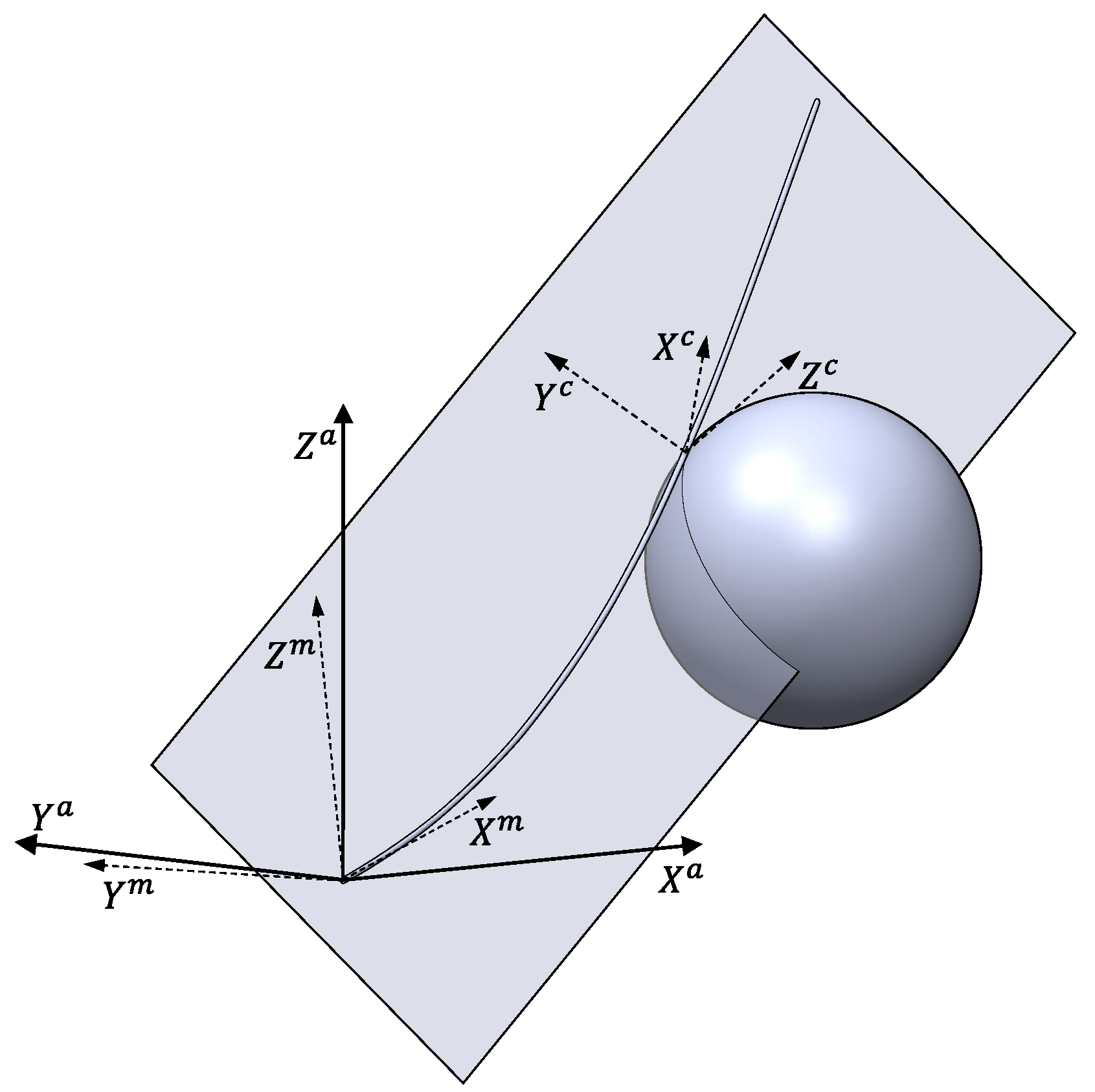
- The motors are stopped at the instant at which the antenna pushes the object with a programmed force whose magnitude is . Hereafter, the base of the antenna will remain quiet, and according to contact mode Assumption 3, the contact point of the antenna and the object will remain steady without slipping. Possible rebounds of the antenna with the object as a consequence of the impact vanish before reaching instant . Hereafter, a contact mode is reached, and the frame , which is attached to the contact point, is defined from the force measured by the F-T sensor at this instant (see Figure 3). After , the behavior of the antenna is characterized by the following:
- (a)
- Its vibrations are almost undamped, and their frequencies are provided by the solution of Equation (6).
- (b)
- There is no vibration in the direction, since Assumption 4 of contact mode implies that the antenna does not have compressive or tensile strain.
- (c)
- Antenna vibrations are consequently produced only in directions and .
- (d)
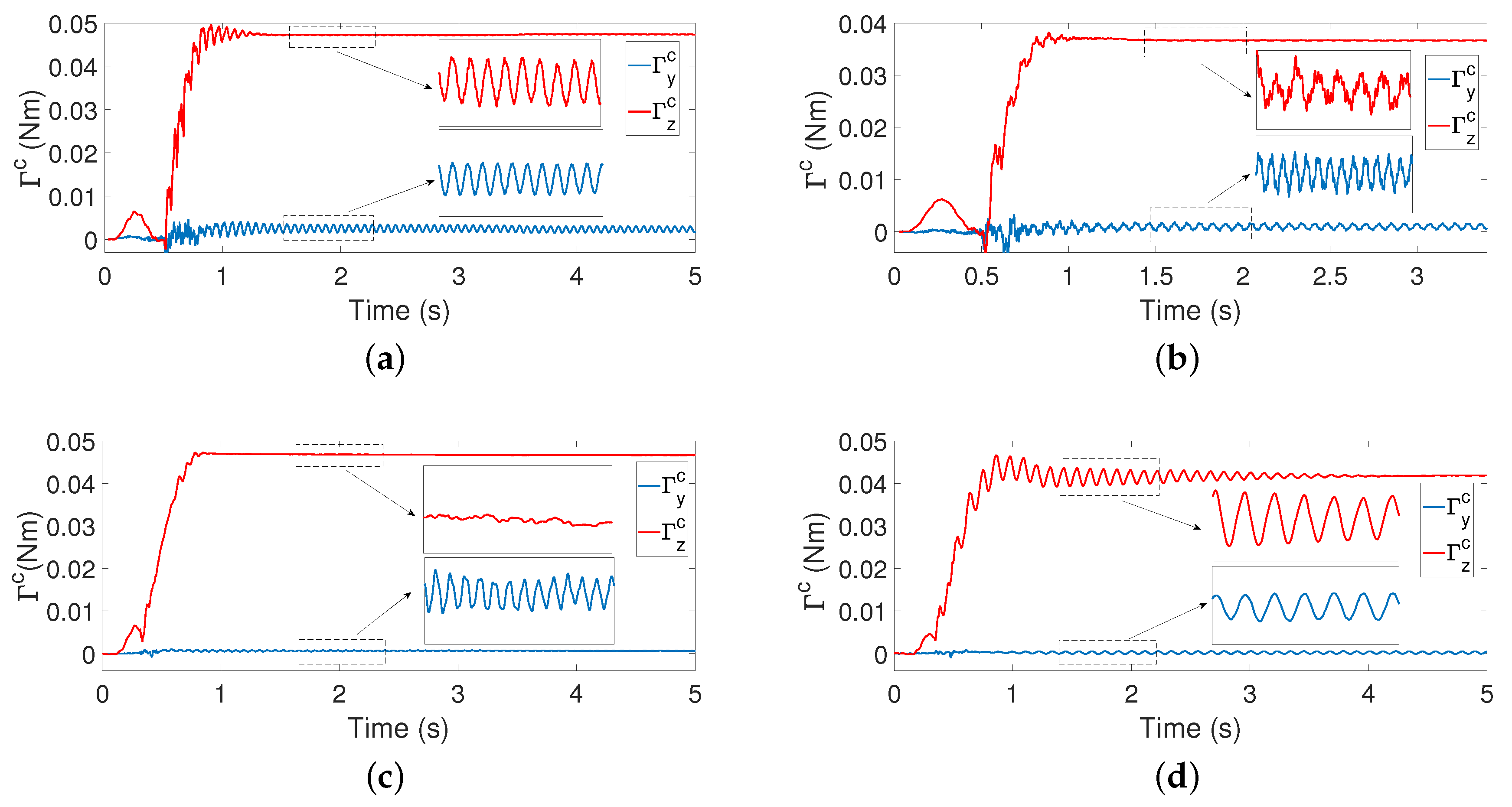
- The pushing of the antenna often damps the vibration in the direction . In these cases, the only significant vibration is produced in the direction.
- (e)
- The shape of the antenna in the steady state is provided by Equation (9) and is contained on the plane defined by the axes and .
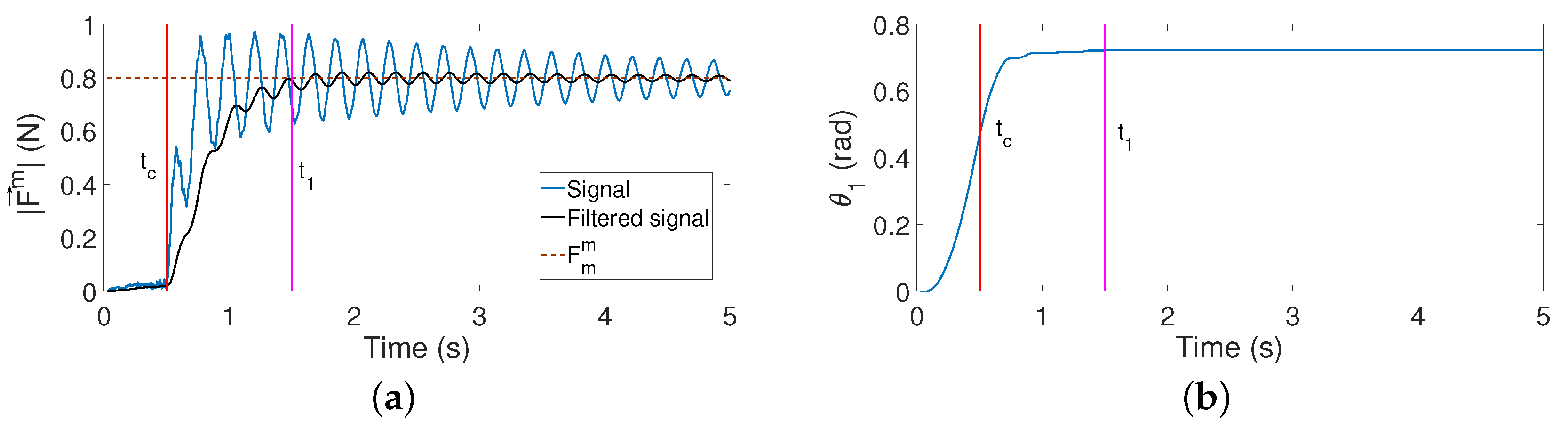
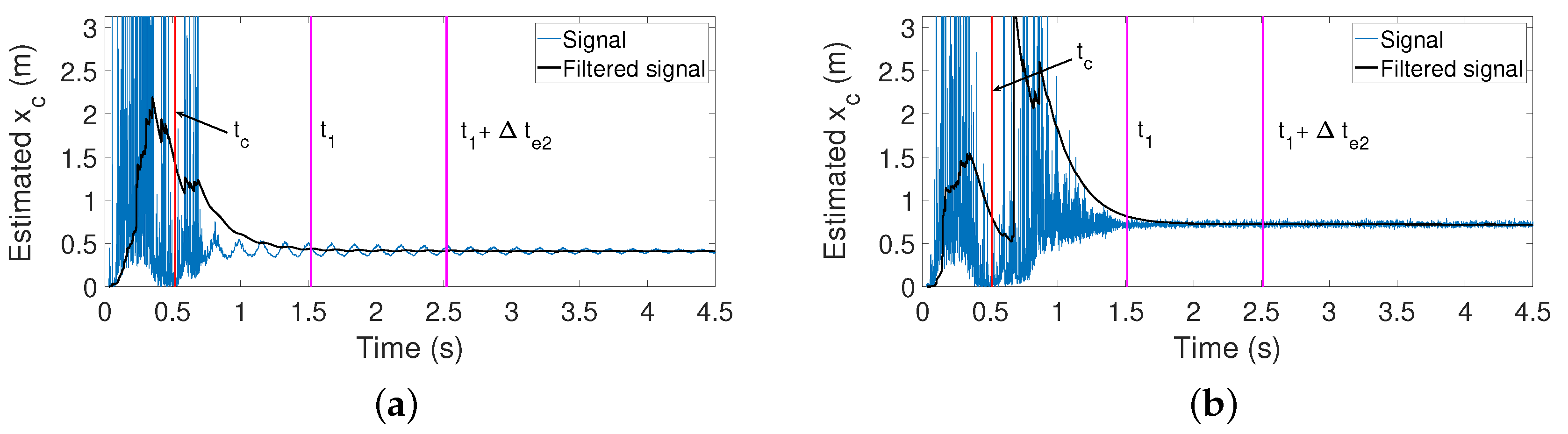
- Once the motors have stopped, two estimators of the contact point are triggered at time . The first estimator (denoted as Estimator 1) is based on calculating the first (fundamental) natural frequency of the remaining vibration and is active during a programmed time interval . The second estimator (denoted as Estimator 2) is based on calculating the torque/force ratio and ends when the torque/force ratio converges to a constant value. The time that has elapsed until this convergence has been produced is represented by .
- The estimation process ends at the instant .
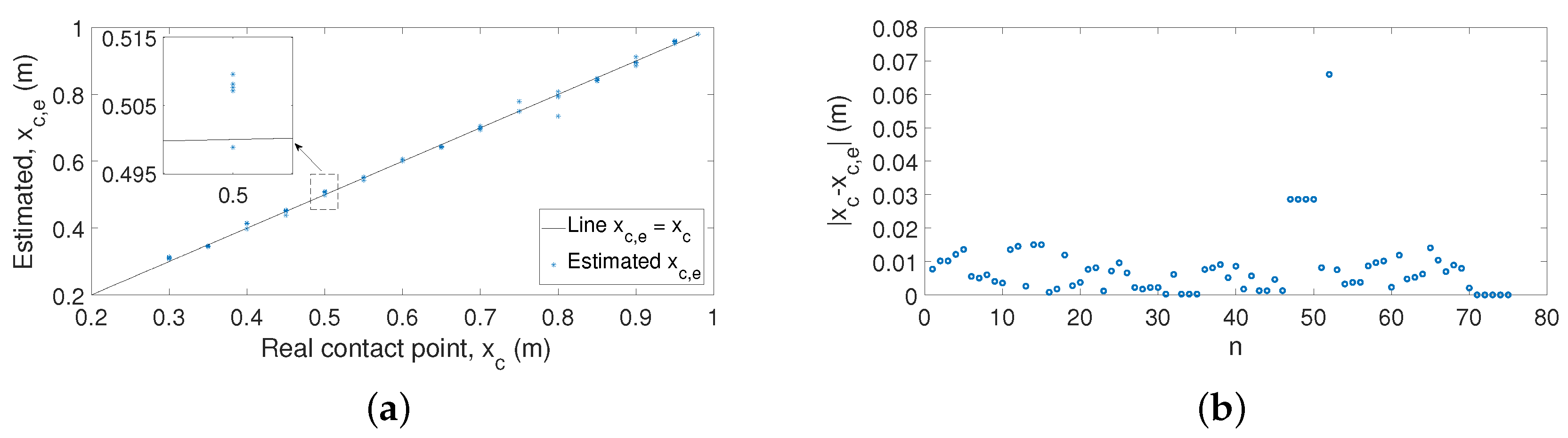
- At instant , the procedure yields the position of the contact point. Of all the points provided by the estimator on the basis of the fundamental frequency (Estimator 1), the procedure proposes that which is closer to the point provided by the torque/force ratio estimator (Estimator 2).
- Finally, at instant , the motor trajectories are reprogrammed in order to ensure that the antenna keeps pushing the object or starts searching for another point with which to make contact.
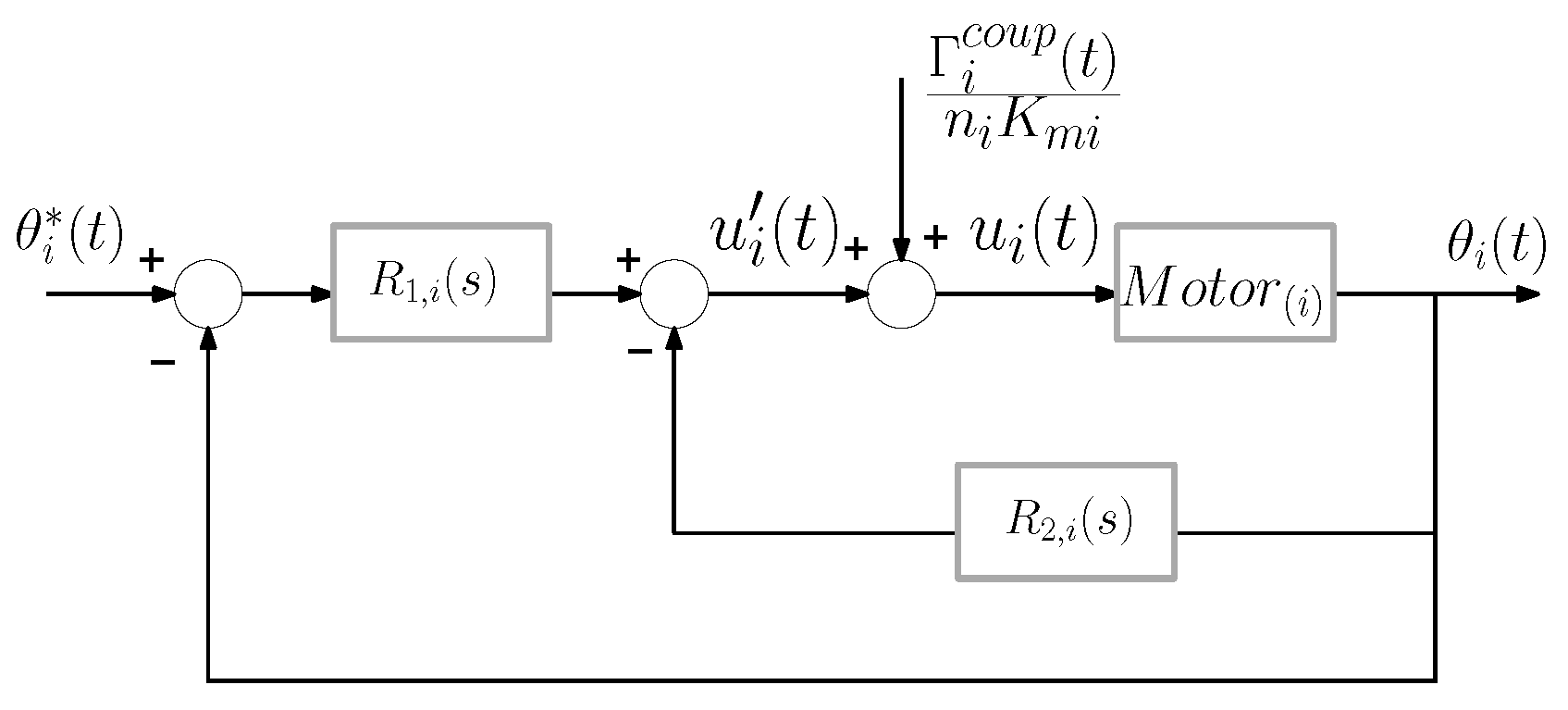
4.1. Motor Control
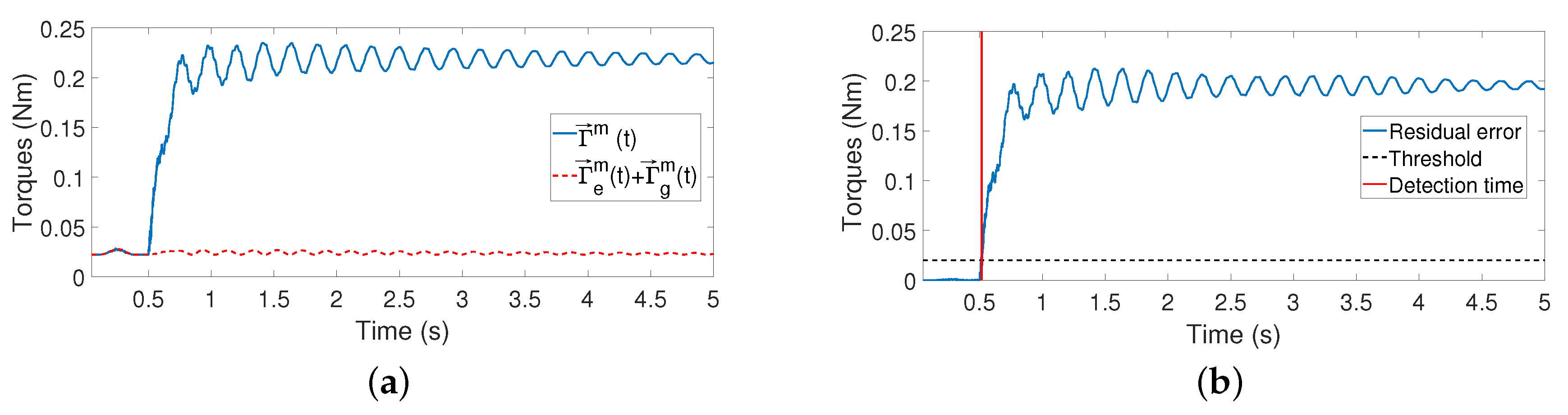
4.2. Estimation of the Contact Instant
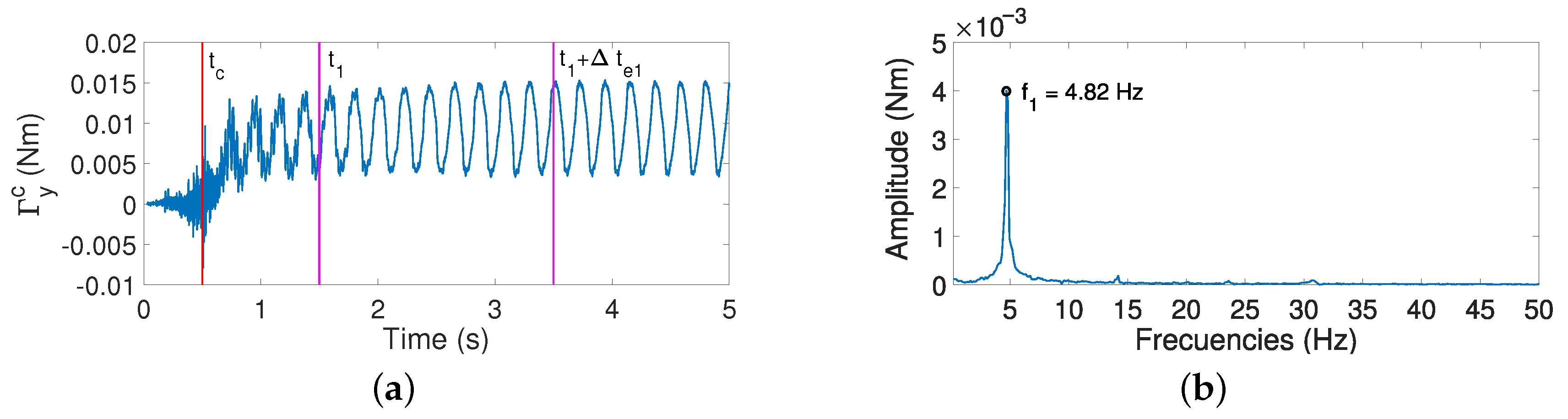
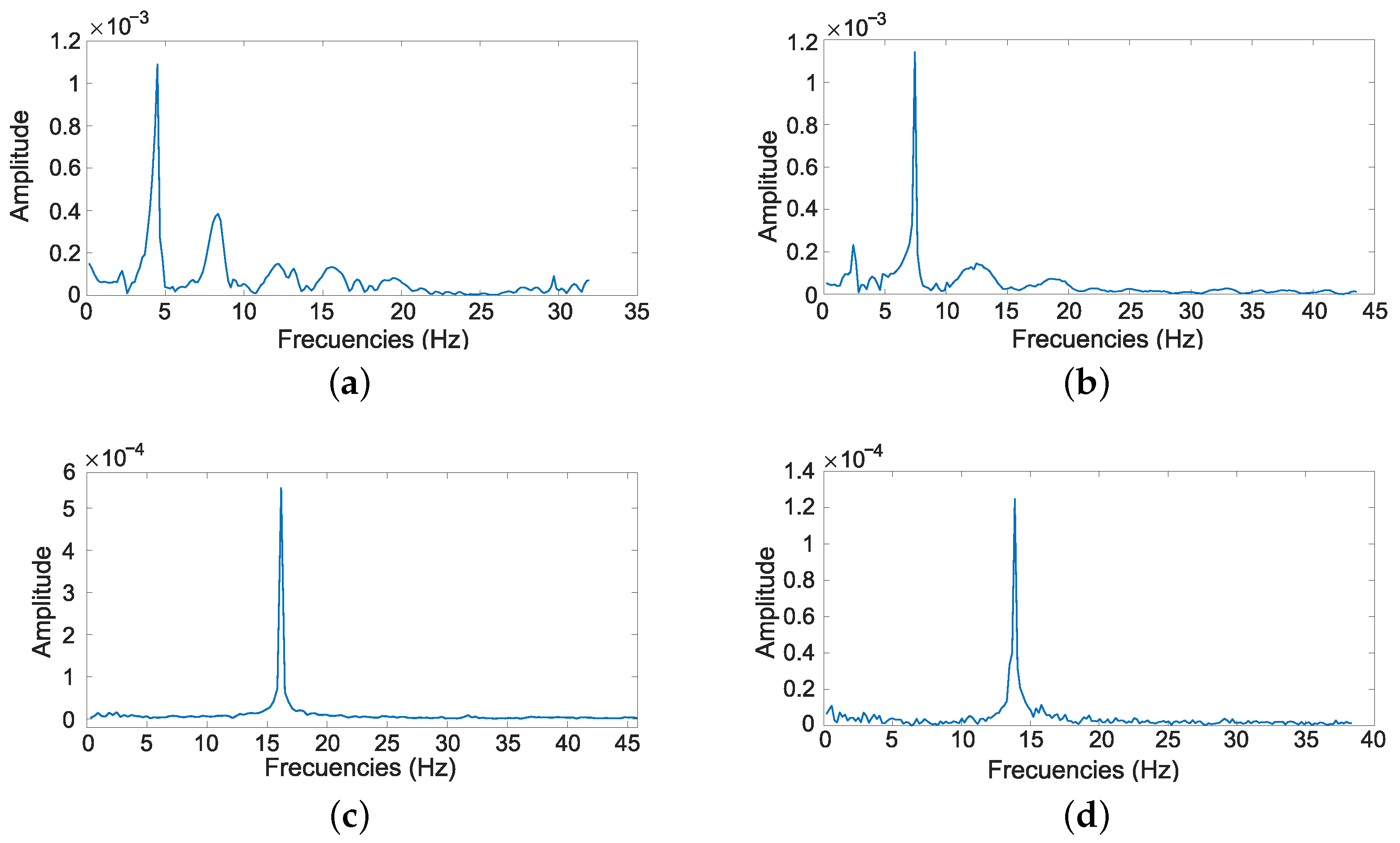
4.3. Estimator Based on Characterizing Vibration Frequencies (Estimator 1)
- It records the vibration in the direction , unlike the method shown in [22], which does so in the direction .
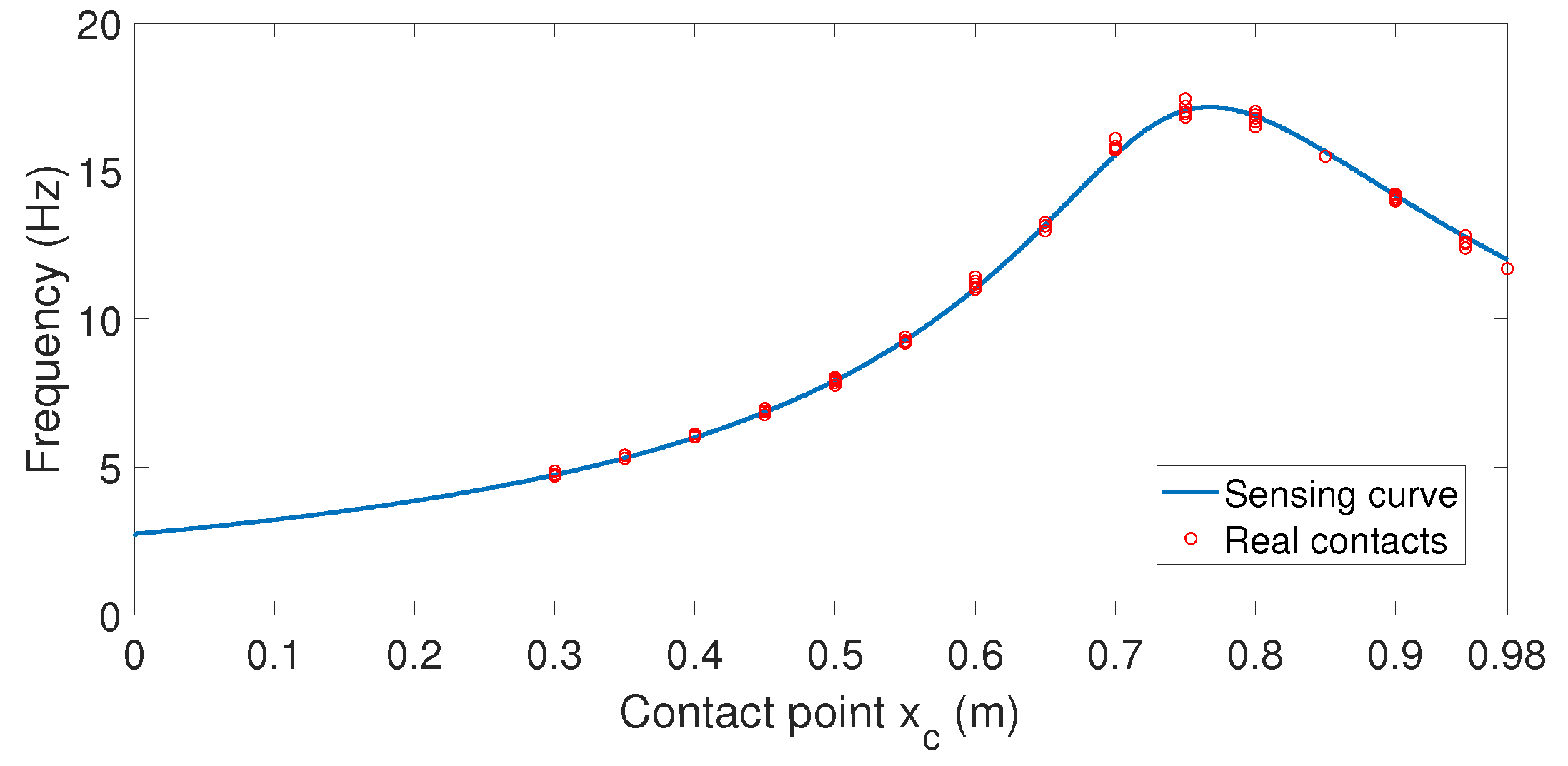
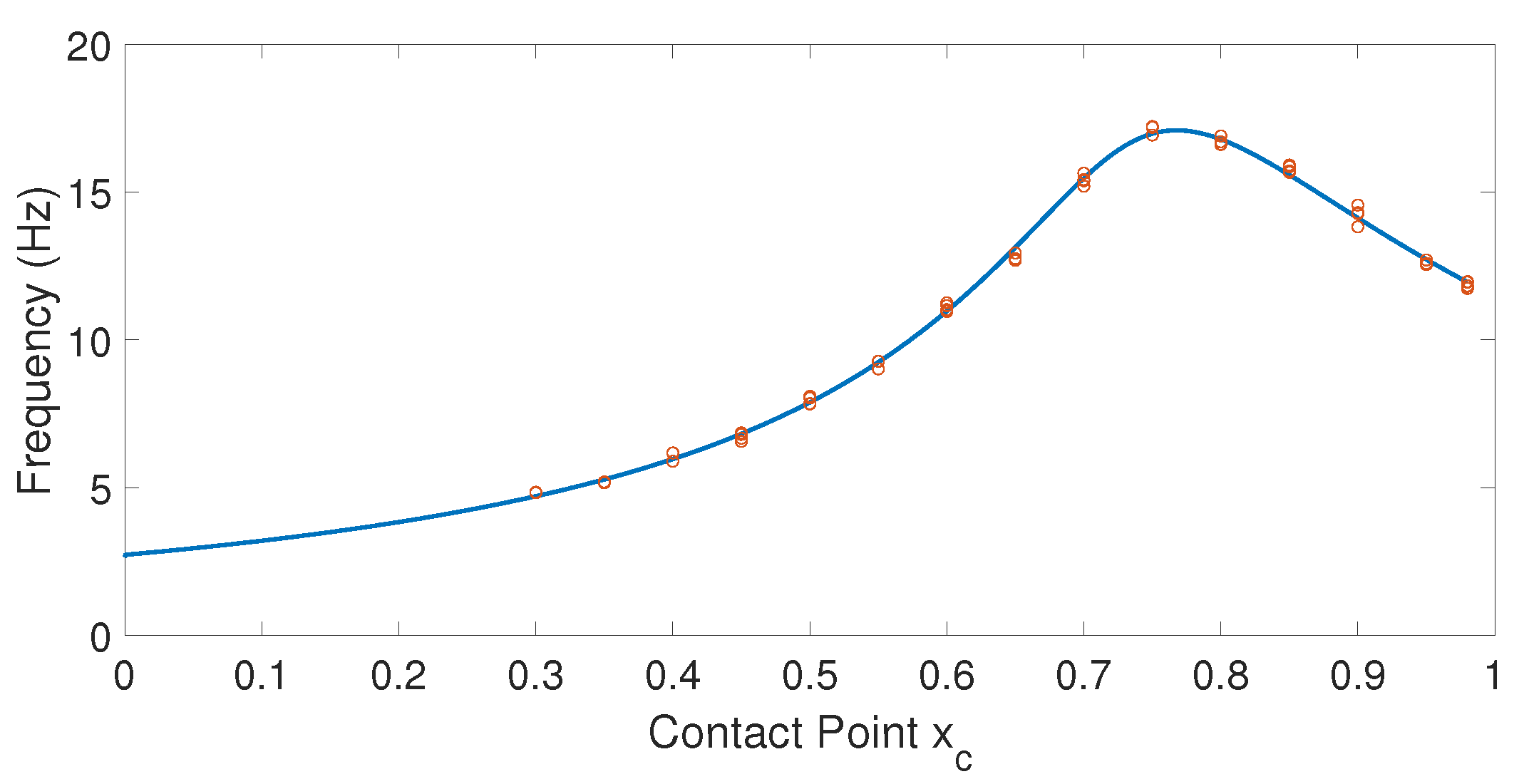
- Our estimator uses only the curve of Figure 8 corresponding to the first frequency, . As stated above, in some cases, it yields two solutions. However, the second estimator will, in that case, discriminate the correct value of .
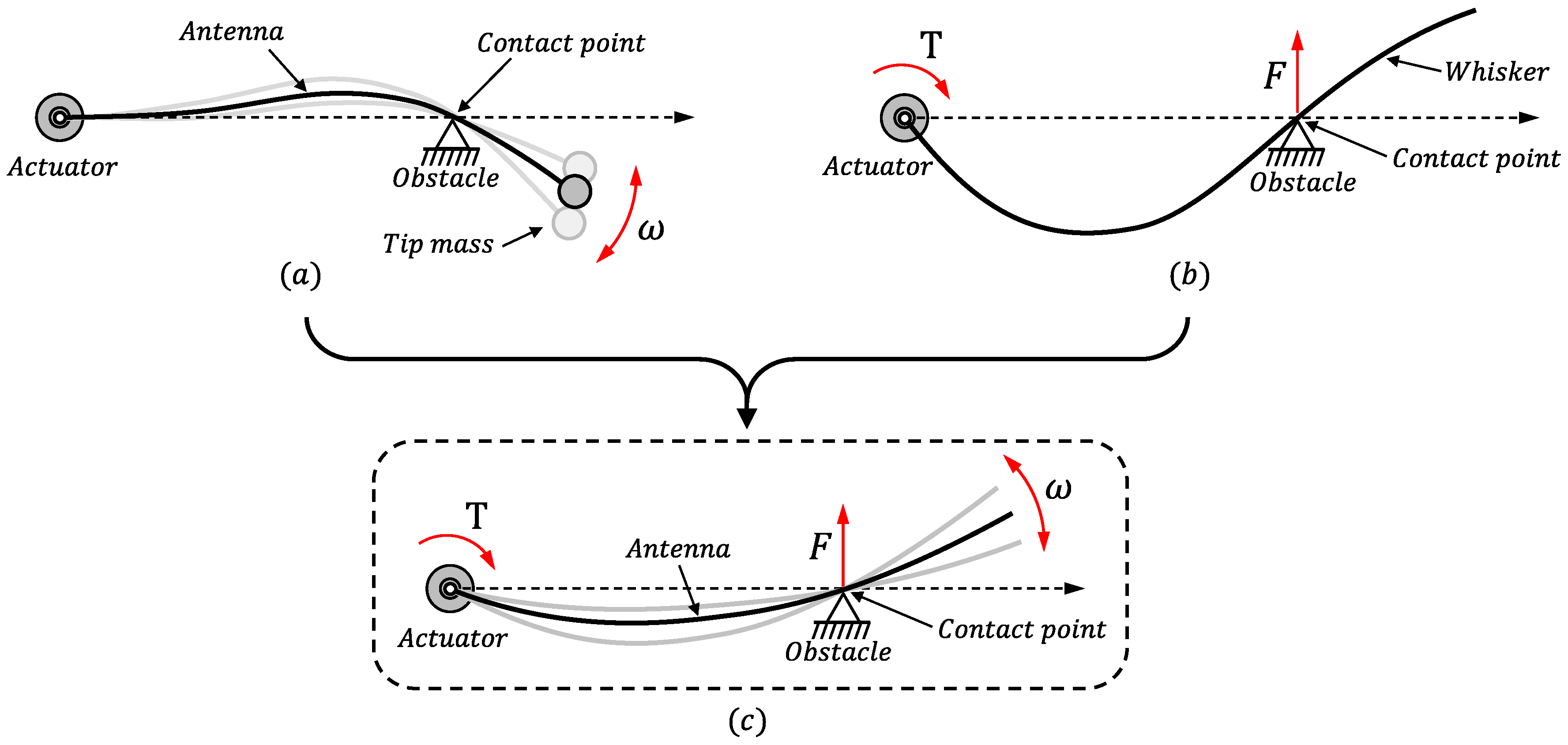
- The motors apply a torque to the antenna in order to carry out the estimation, i.e., in this case, the point at which the link comes into contact with the object is not aligned with the direction of the base end of the link, unlike that which occurs in [22], in which the contact point is aligned with that direction.
4.4. Estimator Based on the Torque/Force ratio (Estimator 2)
5. Results
5.1. Calibration of the Fundamental Frequency-Contact Point Function
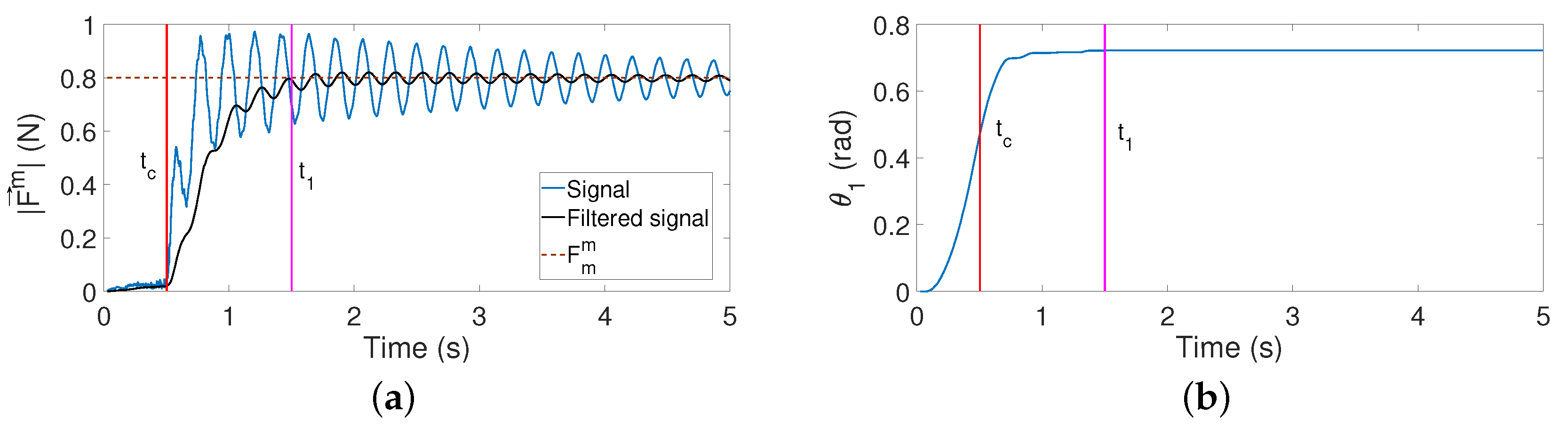
5.2. Detection of the Impact Instant
5.3. Detection of the Instant
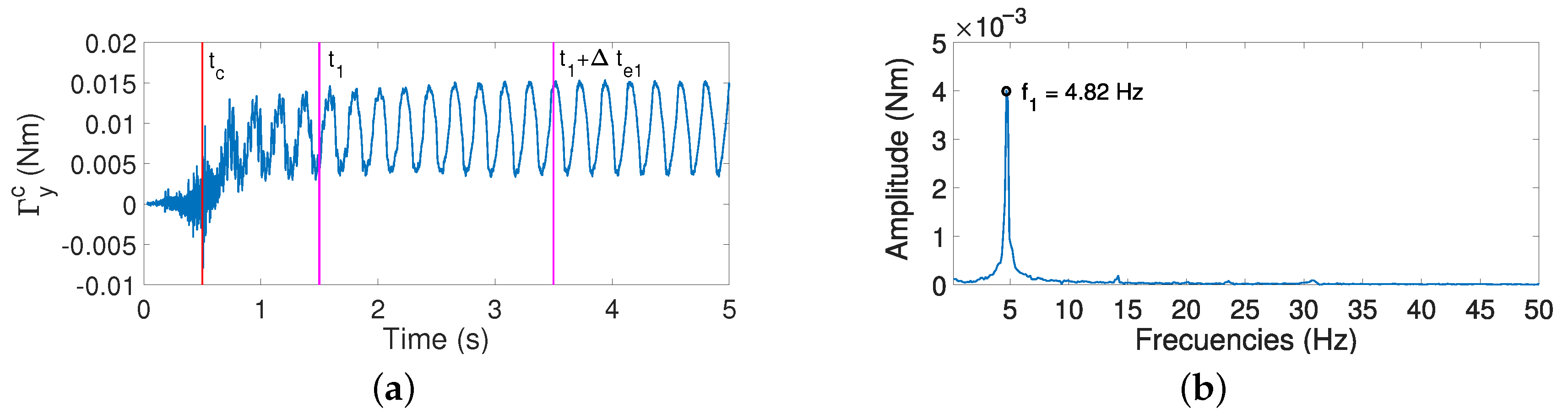
5.4. Estimation of Based on the Determination of the Fundamental Frequency
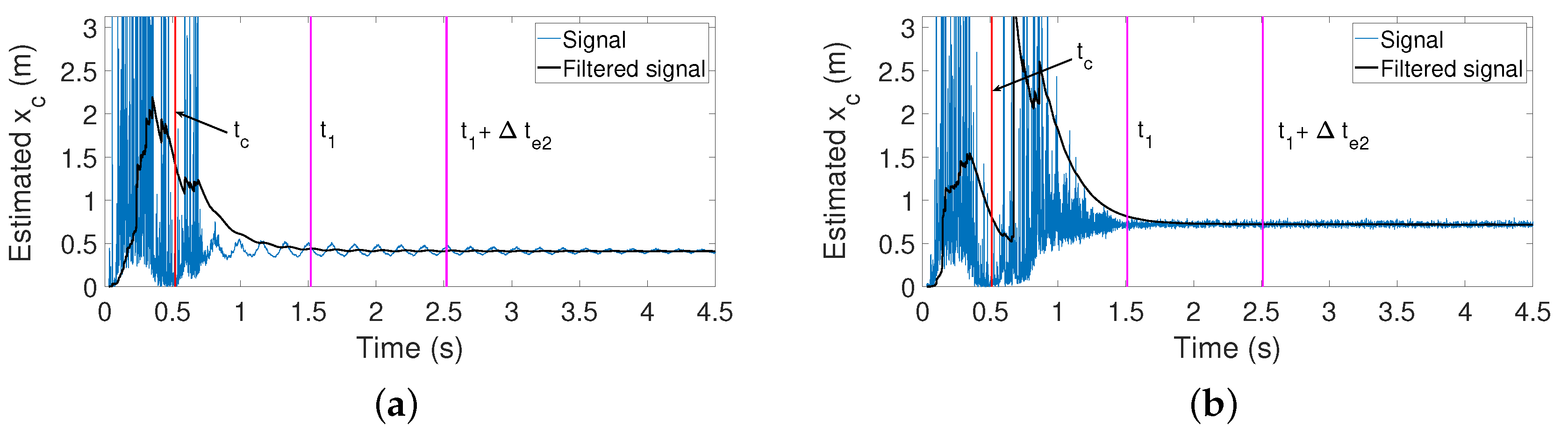
5.5. Estimation of Based on the Determination of the Torque/Force Ratio
5.6. Experiments Regarding Contact Point Detection Based on Combined Static and Dynamic Information
5.6.1. Case 1: Azimuthal Movement
5.6.2. Case 2: Vertical Movement
6. Discussion
- It needs only to estimate the frequency of the first vibration mode.
- It does not require the attachment of a payload at the antenna tip in order to avoid sensitivity problems caused by the frequency estimation process.
- The dynamic model of the antenna in contact mode proposed by [22] is extended to the case in which the actuator applies a permanent torque to the base of the antenna.
- We found that it was not, in some cases, possible to estimate the fundamental frequency from the vibration measured in the direction of the reaction force of the object on the antenna. However, we found that estimating this frequency from the vibration produced in the direction perpendicular to the previous one was more reliable.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Russell, R.A. Using tactile whiskers to measure surface contours. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation (ICRA), Nice, France, 12–14 May 1992; Volume 2, pp. 1295–1299. [Google Scholar]
- Grant, R.A.; Itskov, P.M.; Towal, R.B.; Prescott, T.J. Active touch sensing: Finger tips, whiskers, and antennae. Front. Behav. Neurosci. 2014, 8, 50. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fend, M.E.A. Whisker-based texture discrimination on a mobile robot. Adv. Artif. Life Lect. Notes Comput. Sci. 2005, 3630, 302–311. [Google Scholar]
- Huet, L.; Rudnicki, J.; Hartmann, M. Tactile Sensing with Whiskers of Various Shapes: Determining the Three-Dimensional Location of Object Contact Based on Mechanical Signals at the Whisker Base. Soft Robot. 2017, 4, 88–102. [Google Scholar] [CrossRef] [PubMed]
- Salman, M.; Pearson, M. Whisker-RatSLAM Applied to 6D Object Identification and Spatial Localisation. In Proceedings of the 7th International Conference Biomimetic and Biohybrid Systems, Living Machines (LM), Paris, France, 17–20 July 2018; pp. 403–414. [Google Scholar]
- Pearson, M.; Fox, C.; Sullivan, J.; Prescott, T.; Pipe, T.; Mitchinson, B. Simultaneous localization and mapping on a multi-degree of freedom biomimetic whiskered robot. In Proceedings of the 2013 IEEE International Conference Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 586–592. [Google Scholar]
- Hellbach, S.; Krause, A.; Durr, V. Feel like an insect: A bio-inspired tactile sensor system. In Proceedings of the International Conference on Neural Information Processing, Sydney, Australia, 22–25 November 2010; pp. 676–683. [Google Scholar]
- Valdivia y Alvarado, P.; Subramaniam, V.; Triantafyllou, M. Performance Analysis and Characterization of Bio-Inspired Whisker Sensors for Underwater Applications. In Proceedings of the 2013 IEEE/ RSJ International Conference Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 5956–5961. [Google Scholar]
- Deer, W.; Pounds, P. Lightweight Whiskers for Contact, Pre-Contact, and Fluid Velocity Sensing. Robot. Autom. Lett. IEEE 2019, 4, 1978–1984. [Google Scholar] [CrossRef]
- Nguyen, N.; Ho, V. Mechanics and Morphological Compensation Strategy for Trimmed Soft Whisker Sensor. Soft Robot. 2021. [Google Scholar] [CrossRef] [PubMed]
- Kaneko, M.; Kanayama, N.; Tsuji, T. Active antenna for contact sensing. IEEE Trans. Robot. Autom. 1998, 14, 278–291. [Google Scholar] [CrossRef]
- Scholz, G.R.; Rahn, C.D. Profile sensing with an actuated whisker. IEEE Trans. Robot. Autom. 2004, 20, 124–127. [Google Scholar] [CrossRef]
- De Luca, A.; Albu-Schafier, A.; Haddadin, S.; Hirzinger, G. Collision detection and safe reaction with the DLR-III lightweight manipulator arm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, 9–15 October 2006; pp. 1623–1630. [Google Scholar]
- García, A.; Feliu, V. Force control of a single link flexible robot based on a collision detection mechanism. Control Theory Appl. IEEE Proc. 2000, 147, 588–595. [Google Scholar] [CrossRef]
- Becedas, J.; Payo, I.; Feliu, V. Generalised proportional integral torque control for single link flexible manipulators. Control Theory Appl. IET Proc. 2010, 4, 773–783. [Google Scholar] [CrossRef]
- Malzahn, J.; Bertram, T. Collision detection and reaction for a multi-elastic link robot arm. In Proceedings of the 19 World Congress of the International Federation of Automatic Control (IFAC), Cape Town, South Africa, 24–29 August 2014. [Google Scholar]
- Feliu-Batlle, V.; Feliu-Talegon, D.; Castillo-Berrio, C.F. Improved object detection using a robotic sensing antenna with vibration damping control. Sensors 2017, 17, 852. [Google Scholar] [CrossRef] [PubMed]
- Feliu-Talegon, D.; Cortez-Vega, R.; Feliu-Batlle, V. Improving the contact instant detection of sensing antennae using a Super-Twisting algorithm. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 7885–7890. [Google Scholar]
- Feliu-Talegon, D.; Feliu-Batlle, V.; Tejado, I.; Vinagre, B.M.; HosseinNia, S.H. Stable force control and contact transition of a single link flexible robot using a fractional-order controller. ISA Trans. 2019, 89, 139–157. [Google Scholar] [CrossRef]
- Castillo-Berrio, C.F.; Feliu-Batlle, V. Vibration-free position control for a two degrees of freedom flexible-beam sensor. Mechatronics 2015, 27, 1–12. [Google Scholar] [CrossRef]
- Feliu-Talegon, D.; Feliu-Batlle, V. Improving the position control of a two degrees of freedom robotic sensing antenna using fractional-order controllers. Int. J. Control 2017. [Google Scholar] [CrossRef]
- Ueno, N.; Svinin, M.M.; Kaneko, M. Dynamic contact sensing by flexible beam. IEEE/ASME Trans. Mechatronics 1998, 3, 254–264. [Google Scholar] [CrossRef]
- Clements, T.; Rahn, C.D. Three-dimensional contact imaging with an actuated whisker. IEEE Trans. Robot. Autom. 2006, 22, 844–848. [Google Scholar] [CrossRef]
- Nguyen, N.; Ngo, T.; Nguyen, D.; Ho, V. Contact Distance Estimation by a Soft Active Whisker Sensor Based on Morphological Computation. In Proceedings of the 2020 8th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 322–327. [Google Scholar]
- Castillo Berrio, C.F. Diseño, modelado y Control de Antenas Sensoras Flexibles de dos Grados de Libertad. Ph.D. Thesis, Universidad de Castilla-La Mancha, Ciudad Real, Spain, 2016. [Google Scholar]
- Fayazi, A.; Pariz, N.; Karimpour, A.; Feliu-Batlle, V.; HosseinNia, S. Adaptive Sliding Mode Impedance Control of Single-Link Flexible Manipulators interacting with the Environment at an Unknown Intermediate Point. Robotica 2020, 38, 1642–1664. [Google Scholar] [CrossRef]
- Feliu-Talegon, D.; Feliu-Batlle, V.; Castillo-Berrio, C.F. Motion Control of a Sensing Antenna with a Nonlinear Input Shaping Technique. RIAI-Rev. Iberoam. AutomÁtica Inform. Ind. 2016, 13, 162–173. [Google Scholar] [CrossRef] [Green Version]
- Belendez, T.; Neipp, C.; Belendez, A. Large and small deflections of a cantilever beam. Eur. J. Phys. 2002, 23, 371–379. [Google Scholar] [CrossRef]
- Meirovitch, L. Analytical Methods in Vibrations; Macmillan: New York, NY, USA, 1967. [Google Scholar]
- Hao, G.; Kong, X.; Reuben, R.L. A nonlinear analysis of spatial compliant parallel modules: Multi-beam modules. Mech. Mach. Theory 2011, 46, 680–706. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor 1 | 100 | ||||
| Motor 2 | 100 |
| Parameters of Flexible Link | Quantity | Unit |
|---|---|---|
| Length l | 0.98 | m |
| Radius r | 1 | mm |
| Cross-section | 3.08 | mm2 |
| Section inertia moment I | 0.785 | mm4 |
| Young’s modulus E | ||
| Linear density | 4.7 | g/m |
| Link mass | 4.6 | g |
| (cm) | 30 | 35 | 40 | 45 | 50 | 55 | 60 | 65 | 70 | 75 | 80 | 85 | 90 | 95 | 98 |
| (cm) | |||||||||||||||
| (cm) | |||||||||||||||
| (cm) | |||||||||||||||
| (cm) |
| (cm) | 30 | 35 | 40 | 45 | 50 | 55 | 60 | 65 | 70 | 75 | 80 | 85 | 90 | 95 | 98 |
| (cm) | |||||||||||||||
| (cm) | |||||||||||||||
| (cm) | |||||||||||||||
| (cm) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mérida-Calvo, L.; Feliu-Talegón, D.; Feliu-Batlle, V. Improving the Detection of the Contact Point in Active Sensing Antennae by Processing Combined Static and Dynamic Information. Sensors 2021, 21, 1808. https://doi.org/10.3390/s21051808
Mérida-Calvo L, Feliu-Talegón D, Feliu-Batlle V. Improving the Detection of the Contact Point in Active Sensing Antennae by Processing Combined Static and Dynamic Information. Sensors. 2021; 21(5):1808. https://doi.org/10.3390/s21051808
Chicago/Turabian StyleMérida-Calvo, Luis, Daniel Feliu-Talegón, and Vicente Feliu-Batlle. 2021. "Improving the Detection of the Contact Point in Active Sensing Antennae by Processing Combined Static and Dynamic Information" Sensors 21, no. 5: 1808. https://doi.org/10.3390/s21051808
APA StyleMérida-Calvo, L., Feliu-Talegón, D., & Feliu-Batlle, V. (2021). Improving the Detection of the Contact Point in Active Sensing Antennae by Processing Combined Static and Dynamic Information. Sensors, 21(5), 1808. https://doi.org/10.3390/s21051808