
Design and Validation of Computerized Flight-Testing Systems with Controlled Atmosphere for Studying Flight Behavior of Red Palm Weevil, Rhynchophorus ferrugineus (Olivier)




Abstract
1. Introduction
2. Materials and Methods
2.1. Architecture of Flight-Testing Systems
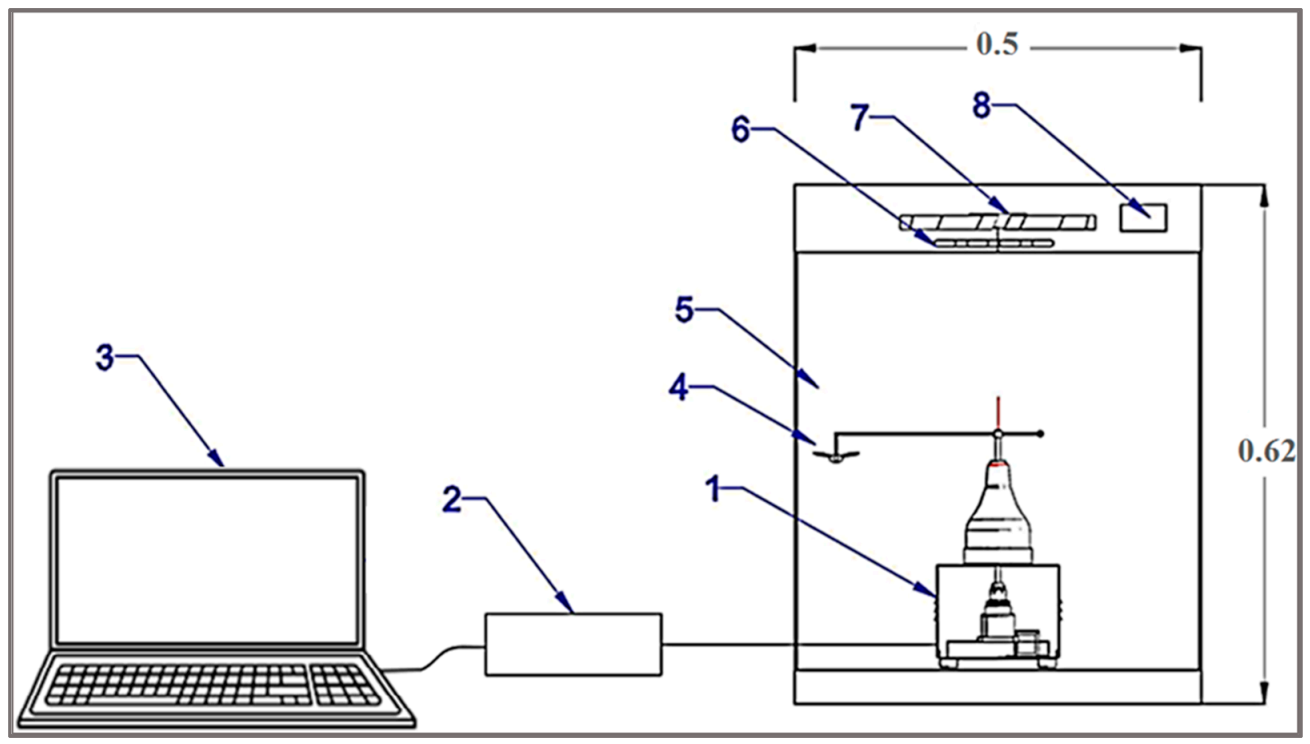
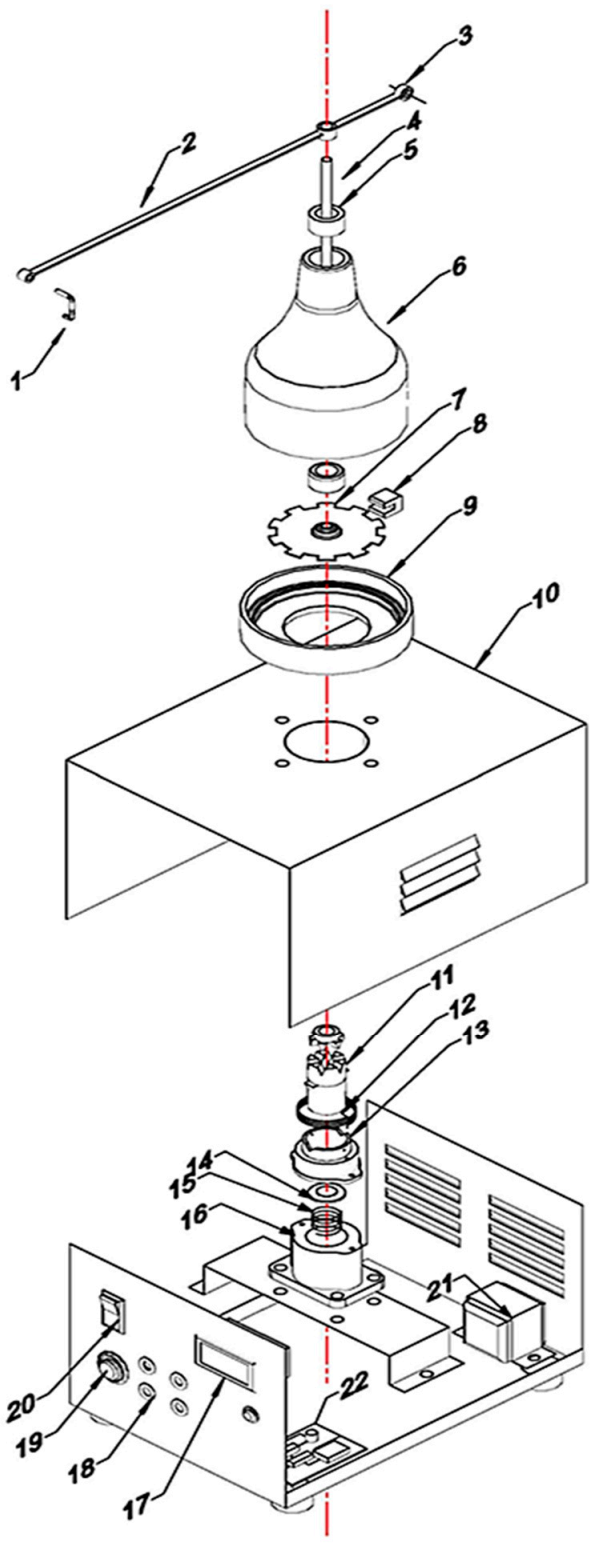
2.1.1. The Computerized Flight-Testing Mill System
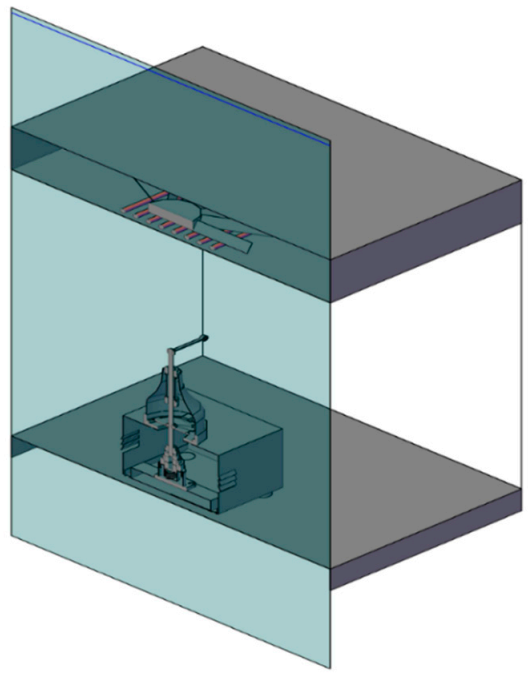
Design of the Flight-Testing Mill
Design of Testing Chamber
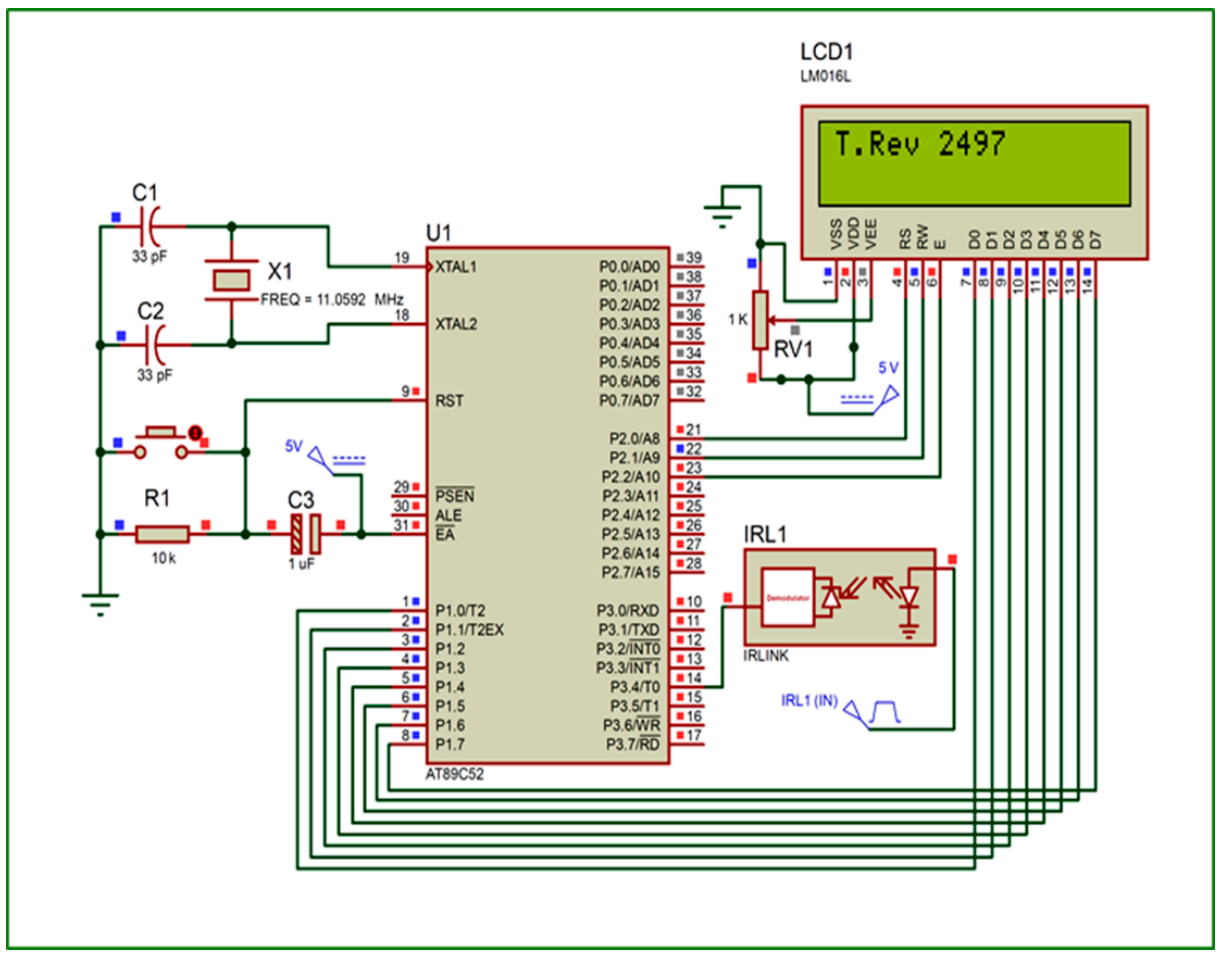
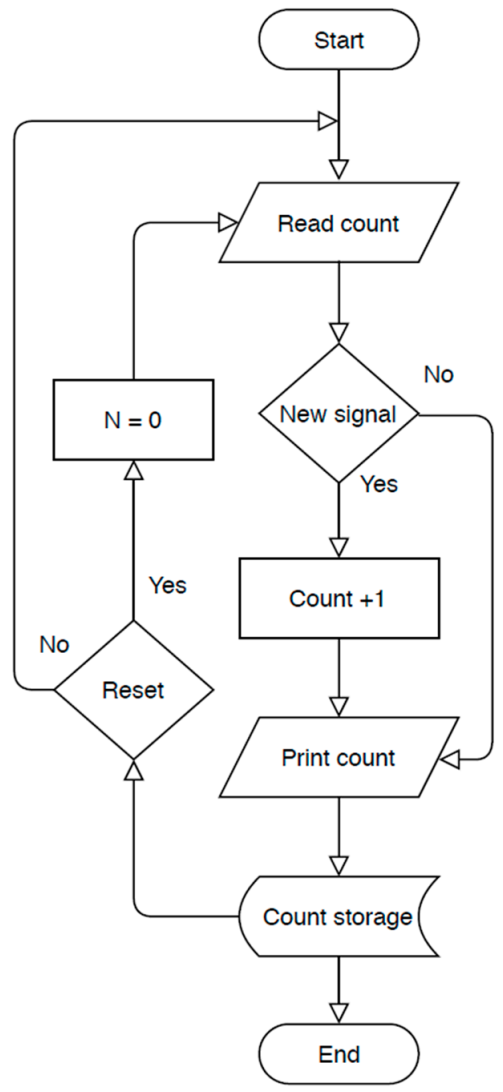
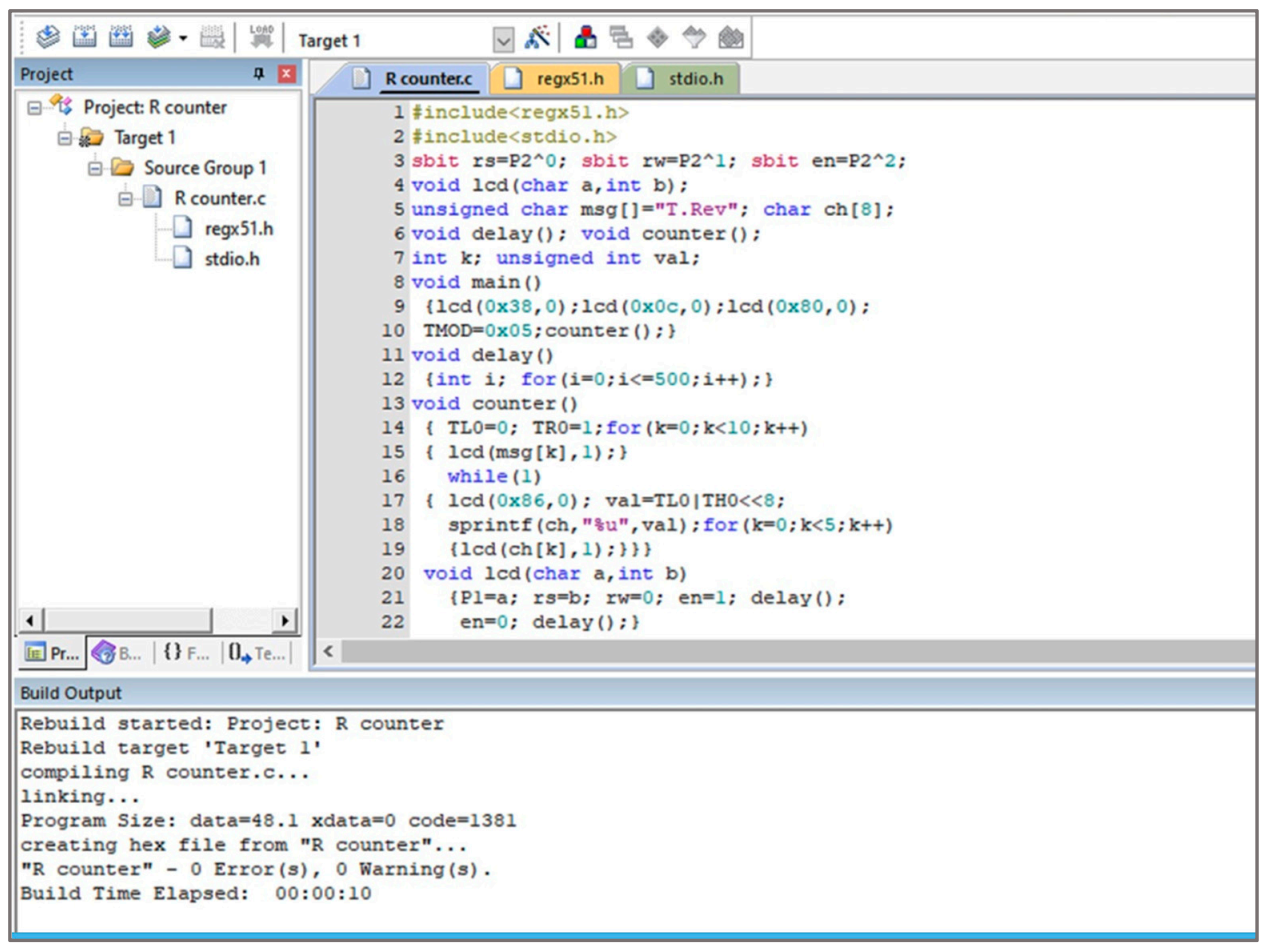
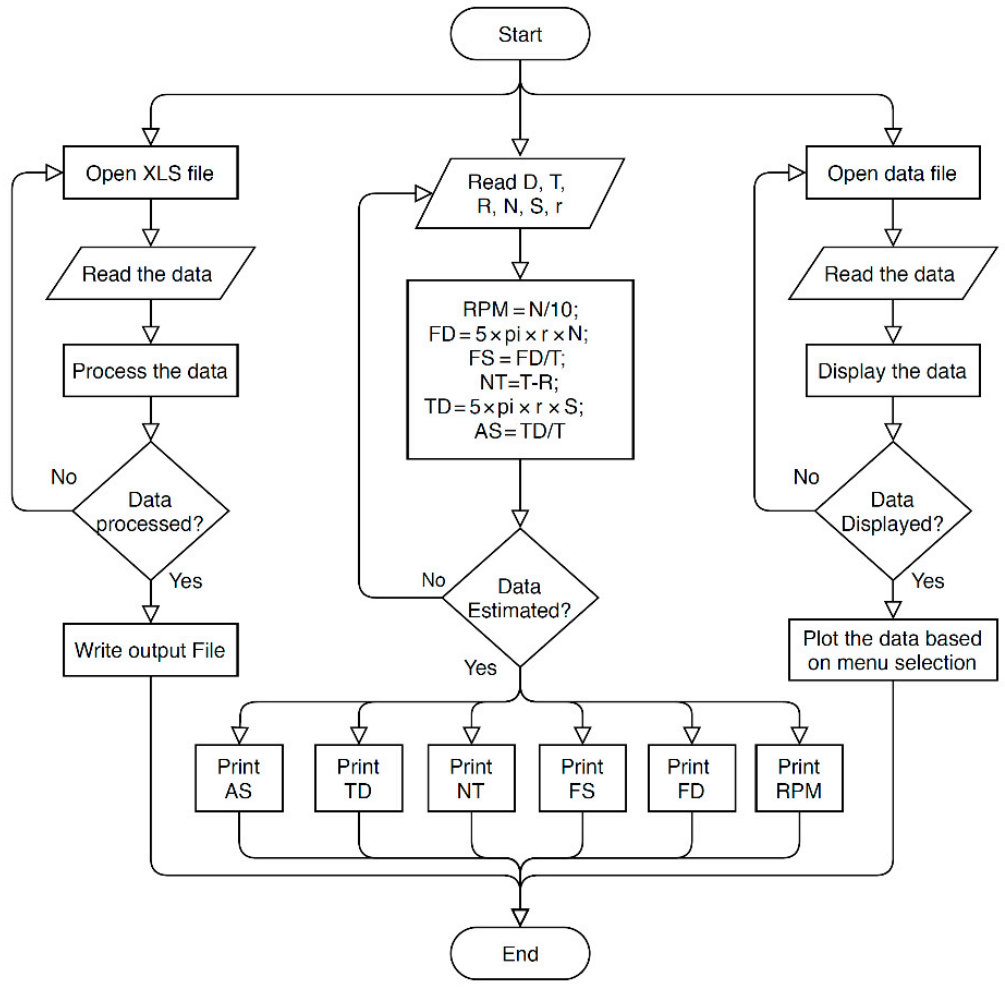
Data Logging and Processing
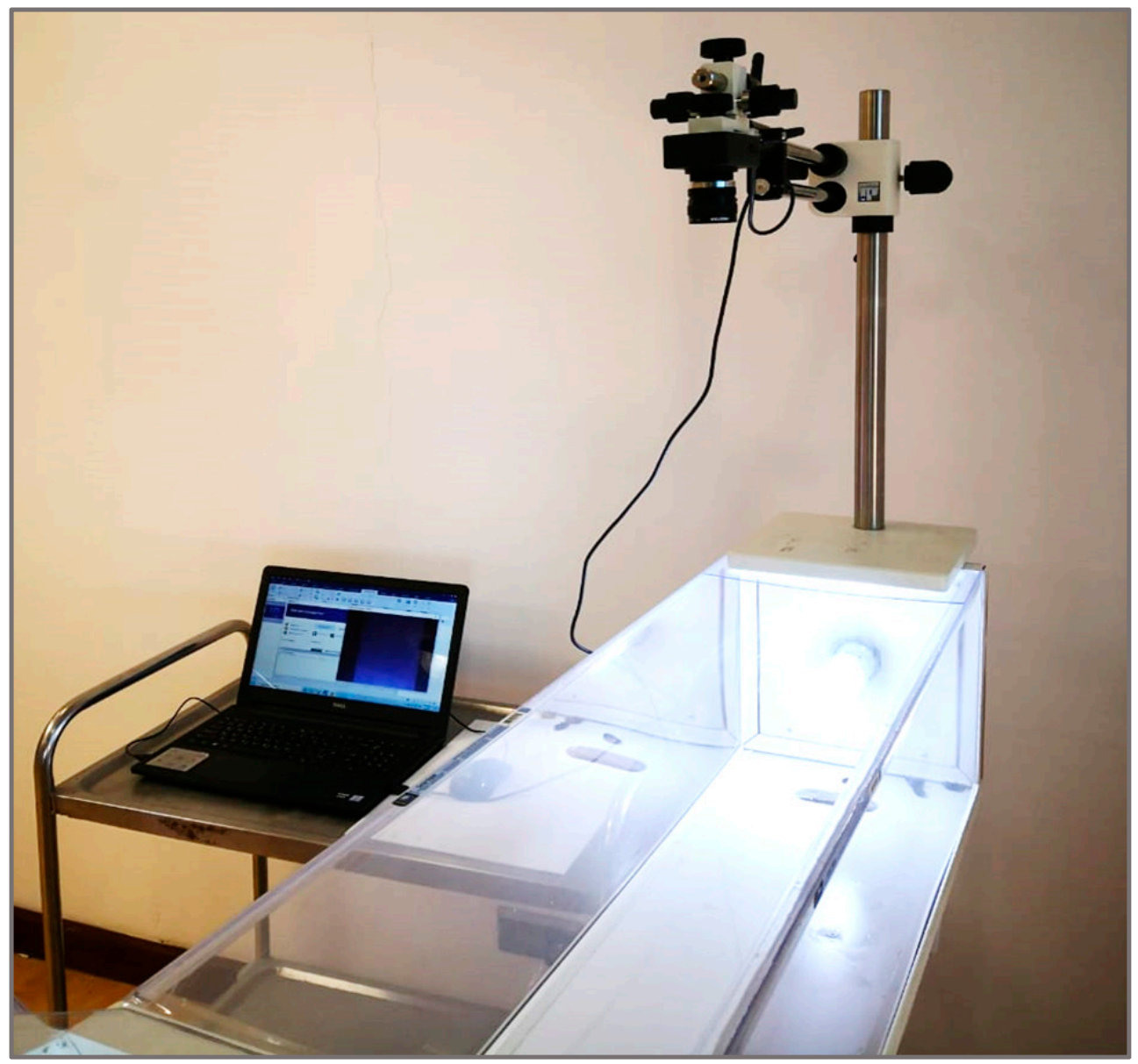
2.1.2. Design of the Flight-Testing Tunnel
2.2. Test Insects
2.3. Measurements
2.3.1. Temperature and Relative Humidity
2.3.2. Flight Parameters
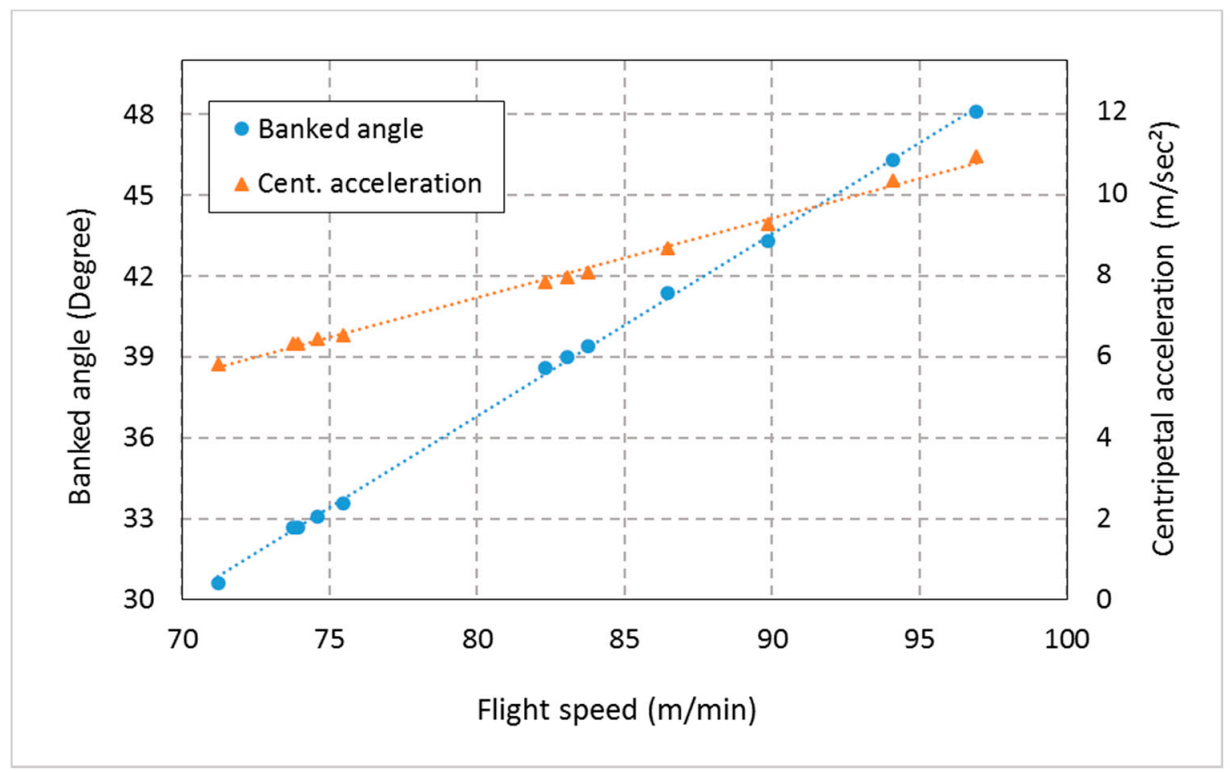
2.3.3. Force Analysis
2.3.4. Morphometric Measurements of RPW
2.4. Experimental Evaluation of the Flight-Testing Systems
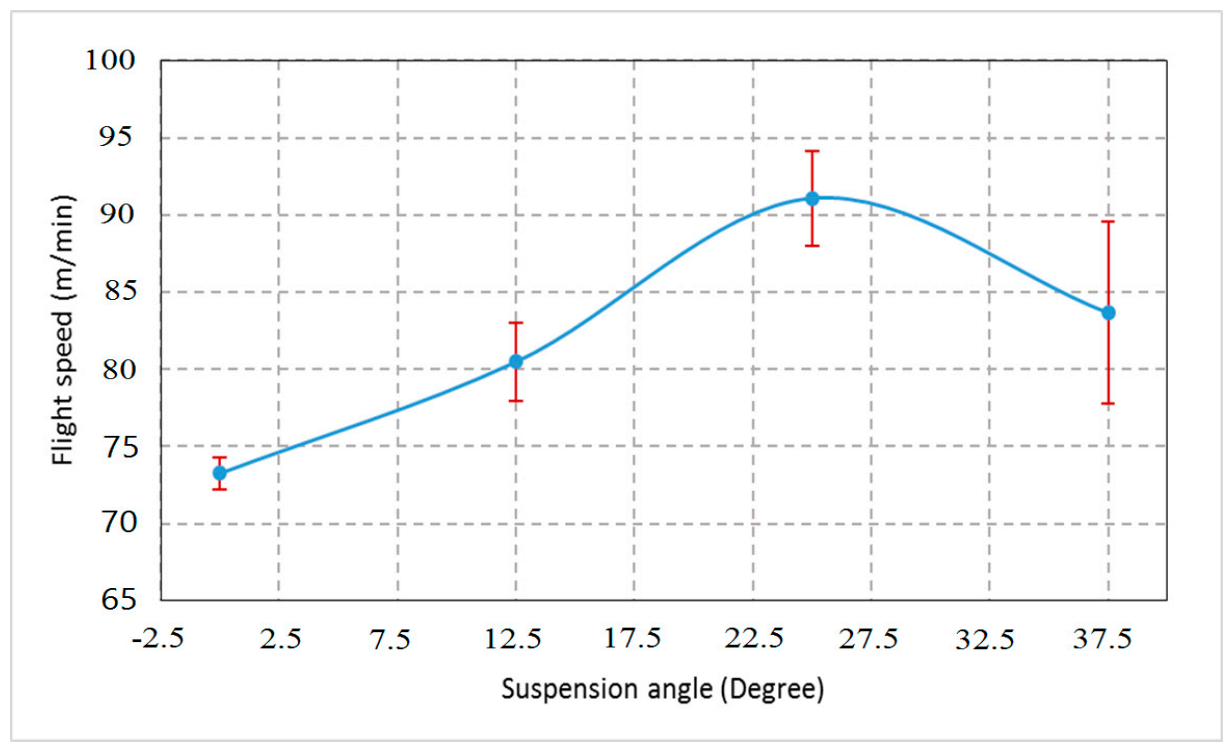
2.4.1. First Experiment: Effect of RPW Suspension Angle on Flight Speed
2.4.2. Second Experiment: Effect of Temperature and Relative Humidity on Flight Parameters
2.4.3. Third Experiment: Flight Speed of RPW in the Flight Tunnel
2.4.4. Fourth Experiment: Force Measurements
2.5. Statistical Analysis
3. Results
3.1. Performance Evaluation of the Systems
3.1.1. Temperature and RH Control
3.1.2. Graphical User Interface of the Flight Mill System
3.1.3. Force Analysis of the Flight Mill
3.1.4. Tracking of RPW in the Flight Tunnel
3.2. Flight Behavior of the RPW
3.2.1. Morphometric Measurements of RPW
3.2.2. Effect of RPW Suspension Angle on Flight Speed
3.2.3. Effect of Temperature and Relative Humidity on Flight Parameters
3.2.4. Flight Speed in the Flight Tunnel
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- El-Shafie, H.A.F.; Mohammed, M.E.A. Description and quantification of damage incurred by the longhorn date palm stem borer Jebusaea hammerschmidti Reiche, 1877 (Coleoptera: Cerambycidae) on date palm (Phoenix dactylifera Linnaeus, 1753). Int. J. Entomol. Res. 2016, 4, 55–65. [Google Scholar]
- Milosavljević, I.; El-Shafie, H.A.F.; Faleiro, J.R.; Hoddle, C.D.; Lewis, M.; Hoddle, M.S. Palmageddon: The wasting of ornamental palms by invasive palm weevils, Rhynchophorus spp. J. Pest Sci. 2019, 92, 143–156. [Google Scholar] [CrossRef]
- El-Shafie, H.A.F. The use of phosphine as curative treatment against date palm borers. Outlooks Pest Manage. 2019, 30, 204–207. [Google Scholar] [CrossRef]
- El-Shafie, H.A.; Mohammed, M.E.; Sallam, A.K.A. Quarantine protocol against coleopteran borers in date palm offshoots using eco2fume gas. Outlooks Pest Manage. 2020, 31, 190–192. [Google Scholar] [CrossRef]
- EPPO Rhynchophorus ferrugineus. EPPO datasheets on pests recommended for regulation. Available online: https://gd.eppo.int (accessed on 1 January 2021).
- Fiaboe, K.K.M.; Peterson, A.T.; Kairo, M.T.K.; Roda, A.L. Predicting the potential worldwide distribution of the red palm weevil Rhynchophorus ferrugineus (Olivier) (Coleoptera: Curculionidae) using ecological niche modeling. Florida Entomol. 2012, 95, 659–673. [Google Scholar] [CrossRef]
- Massoud, M.; Faleiro, J.; El-Saad, M.; Sultan, E. Geographic information system used for assessing the activity of the red palm weevil Rhynchophorus ferrugineus (Olivier) in the date palm Oasis of Al-Hassa, Saudi Arabia. J. Plant Prot. Res. 2011, 51, 234–239. [Google Scholar] [CrossRef]
- Maged, E.A.M.; Hamadttu, A.F.E.-S.; Mohammed, R.A. Recent Trends in the Early Detection of the Invasive Red Palm Weevil, Rhynchophorus ferrugineus (Olivier). In Invasive Species—Introduction Pathways, Economic Impact, and Possible Management Options; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef]
- El-Shafie, H.A.F.; Abdel-Banat, B.M.A.; Mohammed, M.E.A.; Al-Hajhoj, M.R. Monitoring tools and sampling methods for major date palm pests. CAB Rev. Perspect. Agric. Vet. Sci. Nutr. Nat. Resour. 2019, 14, 1–11. [Google Scholar] [CrossRef]
- Vanhove, W.; Feng, Y.; Yu, M.; Hafiz, I.O.; Vanhoudt, N.; Van Damme, P.L.J.; Zhang, A. Evaluation of attract-and-kill strategy for management of cocoa pod borer, Conopomorpha cramerella, in Malaysia cocoa plantation. Int. J. Pest Manage. 2020, 66, 155–162. [Google Scholar] [CrossRef]
- Wijayaratne, L.K.W.; Burks, C.S. Persistence ofmating suppression of the indianmeal moth plodia interpunctella in the presence and absence of commercialmating disruption dispensers. Insects 2020, 11, 701. [Google Scholar] [CrossRef]
- Margaritopoulos, J.T.; Voudouris, C.C.; Olivares, J.; Sauphanor, B.; Mamuris, Z.; Tsitsipis, J.A.; Franck, P. Dispersal ability in codling moth: Mark-release-recapture experiments and kinship analysis. Agric. For. Entomol. 2012, 14, 399–407. [Google Scholar] [CrossRef]
- Schumacher, P.; Weyeneth, A.; Weber, D.C.; Dorn, S. Long flights in Cydia pomonella L. (Lepidoptera: Tortricidae) measured by a flight mill: Influence of sex, mated status and age. Physiol. Entomol. 1997, 22, 149–160. [Google Scholar] [CrossRef]
- Faleiro, J.R.; Ashok Kumar, J.; Rangnekar, P.A. Spatial distribution of red palm weevil Rhynchophorus ferrugineus Oliv. (Coleoptera: Curculionidae) in coconut plantations. Crop Prot. 2002, 21, 171–176. [Google Scholar] [CrossRef]
- Hoddle, M.S.; Hoddle, C.D.; Faleiro, J.R.; El-Shafie, H.A.F.; Jeske, D.R.; Sallam, A.A. How Far Can the Red Palm Weevil (Coleoptera: Curculionidae) Fly?: Computerized Flight Mill Studies with Field-Captured Weevils. J. Econ. Entomol. 2015, 108, 2599–2609. [Google Scholar] [CrossRef] [PubMed]
- Attisano, A.; Murphy, J.T.; Vickers, A.; Moore, P.J. A simple flight mill for the study of tethered flight in insects. J. Vis. Exp. 2015, 2015. [Google Scholar] [CrossRef]
- Yu, E.Y.; Gassmann, A.J.; Sappington, T.W. Using flight mills to measure flight propensity and performance of western corn rootworm, diabrotica virgifera virgifera (Leconte). J. Vis. Exp. 2019, 2019, e59196. [Google Scholar] [CrossRef] [PubMed]
- Lopez, V.M.; McClanahan, M.N.; Graham, L.; Hoddle, M.S. Assessing the Flight Capabilities of the Goldspotted Oak Borer (Coleoptera: Buprestidae) with Computerized Flight Mills. J. Econ. Entomol. 2014, 107, 1127–1135. [Google Scholar] [CrossRef] [PubMed]
- Naranjo, S.E. Assessing insect flight behavior in the laboratory: A primer on flight mill methodology and what can be learned. Ann. Entomol. Soc. Am. 2019, 112, 182–199. [Google Scholar] [CrossRef]
- Wiman, N.G.; Walton, V.M.; Shearer, P.W.; Rondon, S.I.; Lee, J.C. Factors affecting flight capacity of brown marmorated stink bug, Halyomorpha halys (Hemiptera: Pentatomidae). J. Pest Sci. 2015, 88, 37–47. [Google Scholar] [CrossRef]
- Martí-Campoy, A.; Ávalos, J.A.; Soto, A.; Rodríguez-Ballester, F.; Martínez-Blay, V.; Malumbres, M.P. Design of a computerised flight mill device to measure the flight potential of different insects. Sensors 2016, 16, 485. [Google Scholar] [CrossRef]
- Minter, M.; Pearson, A.; Lim, K.S.; Wilson, K.; Chapman, J.W.; Jones, C.M. The tethered flight technique as a tool for studying life-history strategies associated with migration in insects. Ecol. Entomol. 2018, 43, 397–411. [Google Scholar] [CrossRef]
- Hoddle, M.S.; Hoddle, C.D.; Milosavljević, I. How Far Can Rhynchophorus palmarum (Coleoptera: Curculionidae) Fly? J. Econ. Entomol. 2020, 113, 1786–1795. [Google Scholar] [CrossRef] [PubMed]
- Soroker, V.; Suma, P.; La Pergola, A.; Llopis, V.N.; Vacas, S.; Cohen, Y.; Cohen, Y.; Alchanatis, V.; Milonas, P.; Golomb, O.; et al. Surveillance Techniques and DetectionMethods for Rhynchophorus ferrugineus and Paysandisia archon. In Handbook of Major Palm Pests: Biology and Management; Soroker, V., Colazza, S., Eds.; Wiley-Blackwell Chichester: West Sussex, UK, 2017; ISBN 9781119057468. [Google Scholar]
- Barkan, S.; Hoffman, A.; Hezroni, A.; Soroker, V. Flight Performance and Dispersal Potential of Red Palm Weevil Estimated by Repeated Flights on Flight Mill. J. Insect Behav. 2018, 31, 66–82. [Google Scholar] [CrossRef]
- Jones, H.B.C.; Lim, K.S.; Bell, J.R.; Hill, J.K.; Chapman, J.W. Quantifying interspecific variation in dispersal ability of noctuid moths using an advanced tethered flight technique. Ecol. Evol. 2016, 6, 181–190. [Google Scholar] [CrossRef]
- Edwards, J.S. The central nervous control of insect flight. J. Exp. Biol. 2006, 209, 4411–4413. [Google Scholar] [CrossRef]
- Taylor, R.A.J.; Bauer, L.S.; Poland, T.M.; Windell, K.N. Flight performance of agrilus planipennis (Coleoptera: Buprestidae) on a flight mill and in free flight. J. Insect Behav. 2010, 23, 128–148. [Google Scholar] [CrossRef]
- Wood, R.J.; Fearing, R.S. Flight force measurements for a micromechanical flying insect. IEEE Int. Conf. Intell. Robot. Syst. 2001, 1, 355–362. [Google Scholar] [CrossRef][Green Version]
- Weissling, T.J.; Giblin-Davis, R.M.; Center, B.J.; Hiyakawa, T. Flight behavior and seasonal trapping of Rhynchophorus cruentatus (Coleoptera: Curculionidae). Ann. Entomol. Soc. Am. 1994, 87, 641–647. [Google Scholar] [CrossRef]
- Ávalos, J.A.; Balasch, S.; Soto, A. Flight behaviour and dispersal of Rhynchophorus ferrugineus (Coleoptera: Dryophthoridae) adults using mark-release-recapture method. Bull. Entomol. Res. 2016, 106, 606–614. [Google Scholar] [CrossRef]
- MediaCybernetics Image-Pro Plus. Available online: https://www.mediacy.com/imagepro (accessed on 1 January 2021).
- Ribak, G.; Barkan, S.; Soroker, V. The aerodynamics of flight in an insect flight-mill. PLoS ONE 2017, 12, e0186441. [Google Scholar] [CrossRef]
- Daniel Kissling, W.; Pattemore, D.E.; Hagen, M. Challenges and prospects in the telemetry of insects. Biol. Rev. 2014, 89, 511–530. [Google Scholar] [CrossRef]
- Ávalos, J.A.; Martí-Campoy, A.; Soto, A. Study of the flying ability of Rhynchophorus ferrugineus (Coleoptera: Dryophthoridae) adults using a computer-monitored flight mill. Bull. Entomol. Res. 2014, 104, 462–470. [Google Scholar] [CrossRef]
- Maes, S.; Massart, X.; Grégoire, J.C.; De Clercq, P. Dispersal potential of native and exotic predatory ladybirds as measured by a computer-monitored flight mill. BioControl 2014, 59, 415–425. [Google Scholar] [CrossRef][Green Version]
- Hoddle, M.S.; Hoddle, C.D.; Milosavljević, I. Quantification of the Life Time Flight Capabilities of the South American Palm Weevil, Rhynchophorus palmarum (L.)(Coleoptera: Curculionidae). Insects 2021, 12, 126. [Google Scholar] [CrossRef] [PubMed]
- Baker, P.S.; Cooter, R.J. The natural flight of the migratory locust, Locusta migratoria L.—I. Wing movements. J. Comp. Physiol. 1979, 131, 79–87. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | RPW Sex | |||
|---|---|---|---|---|
| Female | Male | |||
| Mean | SD | Mean | SD | |
| Mass (g) | 1.13 A | 0.17 | 0.92 B | 0.09 |
| Body length (mm) | 25.76 A | 2.69 | 26.26 A | 1.01 |
| Thorax width (mm) | 10.96 A | 0.76 | 10.86 A | 0.57 |
| Thorax thickness (mm) | 8.56 A | 0.50 | 8.50 A | 0.82 |
| Calculated volume (cm3) | 1.27 A | 0.23 | 1.28 A | 0.21 |
| Density (g/cm3) | 0.91 A | 0.21 | 0.73 A | 0.11 |
| Wing length (mm) | 22.03 A | 1.33 | 21.88 A | 1.13 |
| Wings area (mm2) | 219.1 A | 15.31 | 218.9 A | 13.27 |
| Flight Parameter | Temperature (°C) | ||||
|---|---|---|---|---|---|
| 20 | 25 | 30 | 35 | 40 | |
| Revolution per sec (RPS) | 0 | 0.94 ±0.08 A | 1.04 ± 0.56 A | 0.93 ± 0.13 A | 0.89 ± 0.02 A |
| Flight speed (m/min) | 0 | 79.69 ± 7.3 A | 87.89 ± 4.8 A | 78.85 ± 11.1 A | 76.02 ± 1.7 A |
| Cumulative flight time (min) | 0 | 273.6 ± 6.4 A | 268.7 ± 10.1 A | 219.7 ± 45.4 A | 98.3 ± 12.0 B |
| Cumulative flight distance (km) | 0 | 21.82 ± 2.2 A | 23.59 ± 0.5 A | 16.98 ± 0.87 B | 7.44 ± 0.76 C |
| Flight Parameter | Relative Humidity (%) | ||
|---|---|---|---|
| 35 | 55 | 75 | |
| Revolution per sec (RPS) | 0.95 ±0.05 A | 0.97 ± 0.07 A | 0.99 ± 0.06 A |
| Flight speed (m/min) | 80.54 ± 4.4 A | 81.95 ± 5.7 A | 83.93 ± 5.56 A |
| Cumulative flight time (min) | 222.0 ± 31.1 A | 240.0 ± 15.3 A | 226.7 ± 15.3 A |
| Cumulative flight distance (km) | 17.89 ± 2.89 A | 19.61 ± 1.14 A | 18.98 ± 0.91 A |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, M.; El-Shafie, H.; Alqahtani, N. Design and Validation of Computerized Flight-Testing Systems with Controlled Atmosphere for Studying Flight Behavior of Red Palm Weevil, Rhynchophorus ferrugineus (Olivier). Sensors 2021, 21, 2112. https://doi.org/10.3390/s21062112
Mohammed M, El-Shafie H, Alqahtani N. Design and Validation of Computerized Flight-Testing Systems with Controlled Atmosphere for Studying Flight Behavior of Red Palm Weevil, Rhynchophorus ferrugineus (Olivier). Sensors. 2021; 21(6):2112. https://doi.org/10.3390/s21062112
Chicago/Turabian StyleMohammed, Maged, Hamadttu El-Shafie, and Nashi Alqahtani. 2021. "Design and Validation of Computerized Flight-Testing Systems with Controlled Atmosphere for Studying Flight Behavior of Red Palm Weevil, Rhynchophorus ferrugineus (Olivier)" Sensors 21, no. 6: 2112. https://doi.org/10.3390/s21062112
APA StyleMohammed, M., El-Shafie, H., & Alqahtani, N. (2021). Design and Validation of Computerized Flight-Testing Systems with Controlled Atmosphere for Studying Flight Behavior of Red Palm Weevil, Rhynchophorus ferrugineus (Olivier). Sensors, 21(6), 2112. https://doi.org/10.3390/s21062112