
Platoon Merging Approach Based on Hybrid Trajectory Planning and CACC Strategies


Abstract
:1. Introduction
2. Platforms and Methods
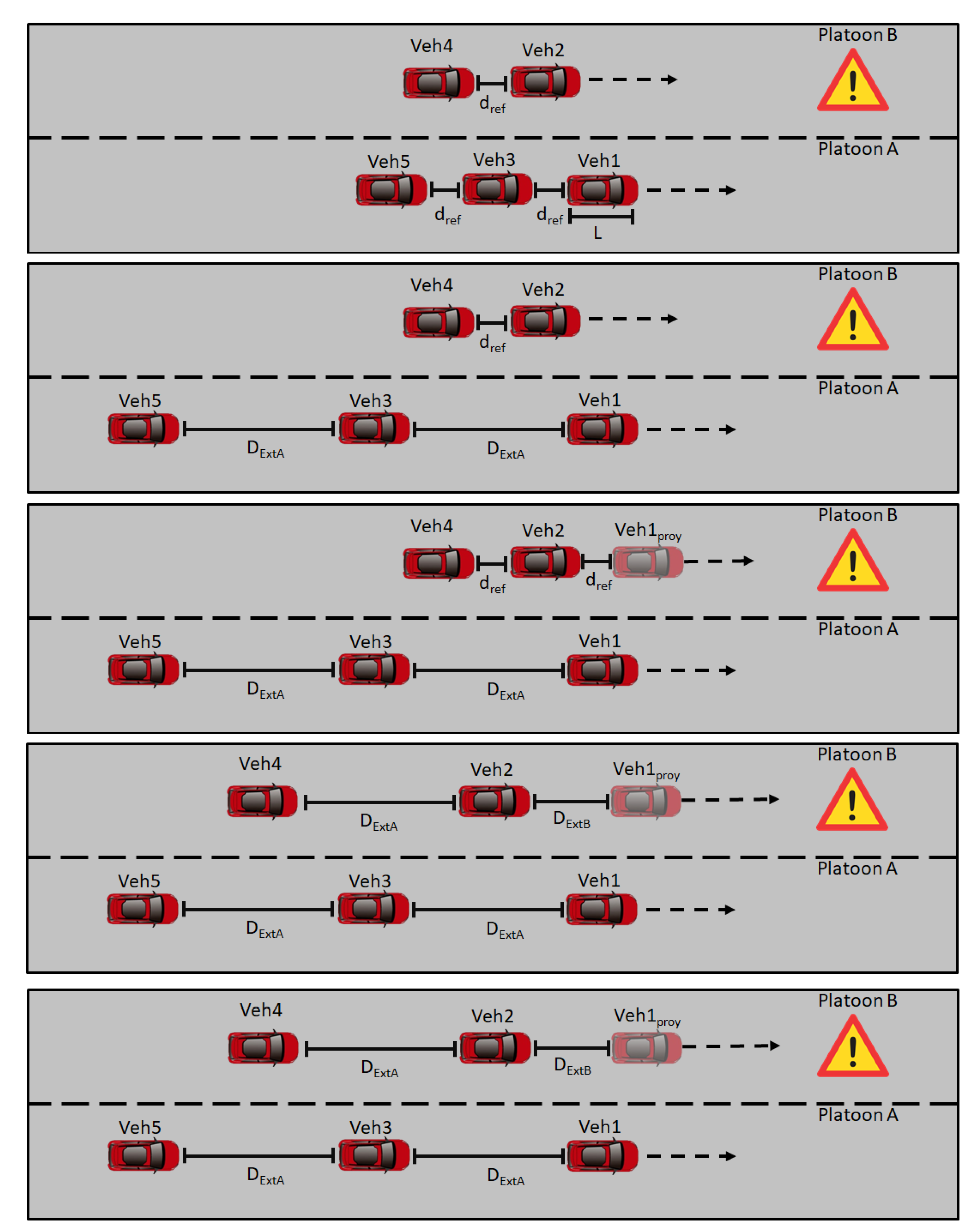
2.1. Platoon Merging Method
- L variable stands for the vehicle length, being the same for all vehicles.
- represents the distance reference between vehicles, explained in Section 2.2.2.
- is the gap opened by Platoon A (Equation (1)), being 2 times the minimum CACC distance () defined in Section 2.2.2 plus the vehicle length (L). By using this relation, the vehicles in Platoon B can join around a safe position while keeping the minimum distance between vehicles.
- is the distance between Vehicle 2 and the projection of Vehicle 1 in the Platoon B lane.where and are the front projections by in the Platoon B lane of the Platoon A vehicle that previously opened the gap.
2.2. Platform Description
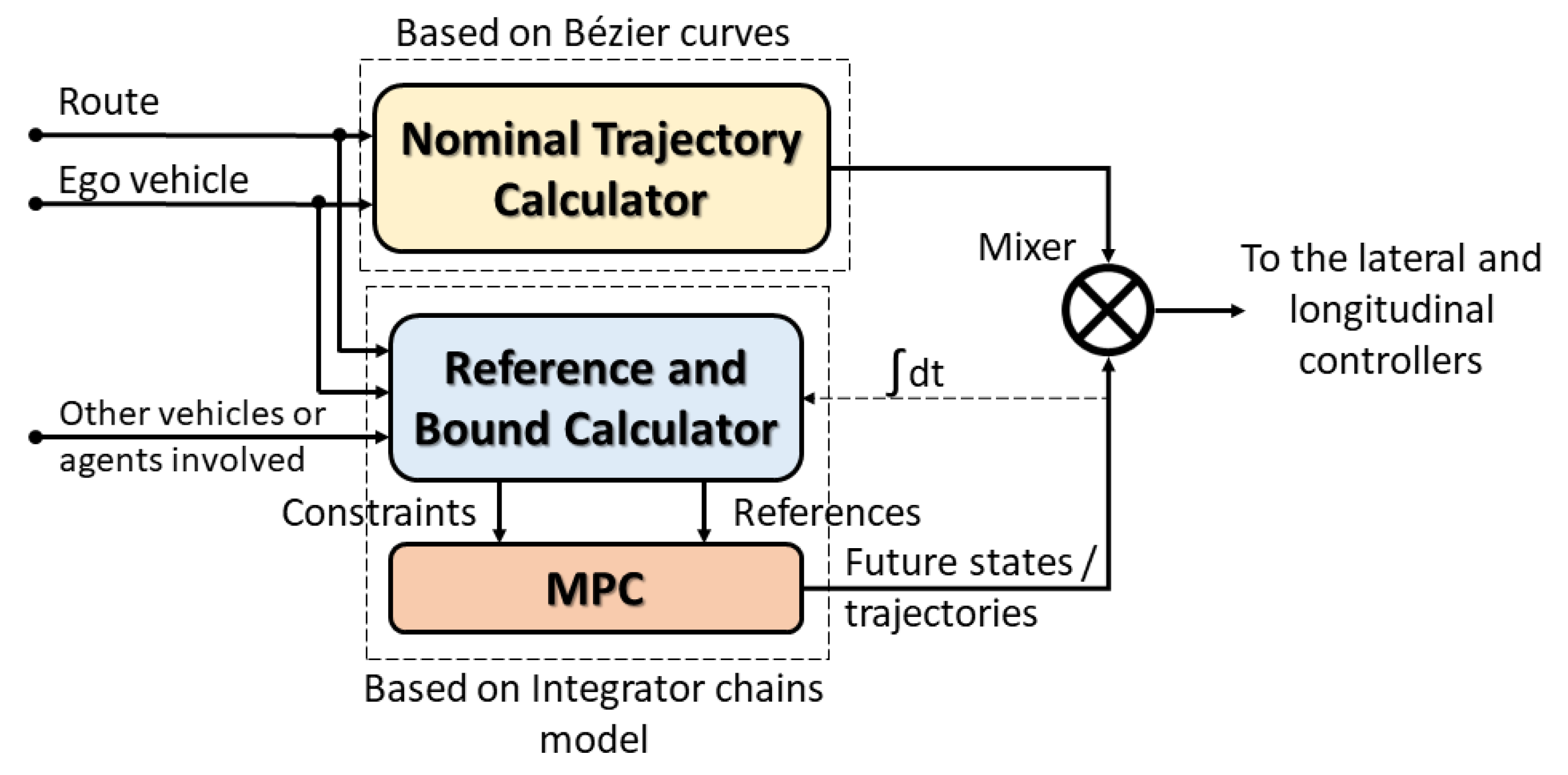
2.2.1. Hybrid Trajectory Approach
- A fifth-order Bézier curve was chosen. The control points were aligned with the lane axis to guarantee a curvature of zero at the starting and ending points. Furthermore, the point was added to handle the maneuver in local planning.
- and are the unitary vectors for the path description and have the following relation (Equation (11)):
- w is the width of the road, and D is the separation in the axis between each pair of control points (Equation (12)).
- The minimum value of D is equal to w, which leads to a maximum curvature in and .
2.2.2. Cooperative Adaptive Cruise Control Approach
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koźlak, A.; Wach, D. Causes of traffic congestion in urban areas. Case of Poland. In Proceedings of the SHS Web of Conferences, EDP Sciences, Samara, Russia, 26–27 November 2018; Volume 57, p. 01019. [Google Scholar]
- Guo, Y.; Tang, Z.; Guo, J. Could a Smart City Ameliorate Urban Traffic Congestion? A Quasi-Natural Experiment Based on a Smart City Pilot Program in China. Sustainability 2020, 12, 2291. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Jarrett, D.F. Stability analysis of the classical car-following model. Transp. Res. Part B Methodol. 1997, 31, 441–462. [Google Scholar] [CrossRef]
- van den Broek, T.H.; Ploeg, J.; Netten, B.D. Advisory and autonomous cooperative driving systems. In Proceedings of the 2011 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 9–12 January 2011; pp. 279–280. [Google Scholar]
- Naus, G.J.; Vugts, R.P.; Ploeg, J.; van De Molengraft, M.J.; Steinbuch, M. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Trans. Veh. Technol. 2010, 59, 4268–4279. [Google Scholar] [CrossRef]
- Gunter, G.; Gloudemans, D.; Stern, R.E.; McQuade, S.; Bhadani, R.; Bunting, M.; Delle Monache, M.L.; Lysecky, R.; Seibold, B.; Sprinkle, J.; et al. Are commercially implemented adaptive cruise control systems string stable? IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef] [Green Version]
- Flores, C.; Merdrignac, P.; de Charette, R.; Navas, F.; Milanés, V.; Nashashibi, F. A cooperative car-following/emergency braking system with prediction-based pedestrian avoidance capabilities. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1837–1846. [Google Scholar] [CrossRef] [Green Version]
- van Nunen, E.; Verhaegh, J.; Silvas, E.; Semsar-Kazerooni, E.; van de Wouw, N. Robust model predictive cooperative adaptive cruise control subject to V2V impairments. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar]
- Chen, X.; Xu, B.; Qin, X.; Bian, Y.; Hu, M.; Sun, N. Non-Signalized Intersection Network Management With Connected and Automated Vehicles. IEEE Access 2020, 8, 122065–122077. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhao, D.; Zhong, Z. Adaptive optimal control of heterogeneous CACC system with uncertain dynamics. IEEE Trans. Control. Syst. Technol. 2018, 27, 1772–1779. [Google Scholar] [CrossRef]
- Bian, Y.; Li, S.E.; Ren, W.; Wang, J.; Li, K.; Liu, H.X. Cooperation of multiple connected vehicles at unsignalized intersections: Distributed observation, optimization, and control. IEEE Trans. Ind. Electron. 2019, 67, 10744–10754. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.; Shladover, S.E.; Lu, X.Y.; Ferlis, R.E. Impact of cooperative adaptive cruise control on multilane freeway merge capacity. J. Intell. Transp. Syst. 2018, 22, 263–275. [Google Scholar] [CrossRef]
- Shladover, S.E.; Su, D.; Lu, X.Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Bevly, D.; Cao, X.; Gordon, M.; Ozbilgin, G.; Kari, D.; Nelson, B.; Woodruff, J.; Barth, M.; Murray, C.; Kurt, A.; et al. Lane change and merge maneuvers for connected and automated vehicles: A survey. IEEE Trans. Intell. Veh. 2016, 1, 105–120. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. Automated and cooperative vehicle merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 780–789. [Google Scholar] [CrossRef]
- Zhao, L.; Malikopoulos, A.; Rios-Torres, J. Optimal control of connected and automated vehicles at roundabouts: An investigation in a mixed-traffic environment. IFAC-PapersOnLine 2018, 51, 73–78. [Google Scholar] [CrossRef]
- Ploeg, J.; Semsar-Kazerooni, E.; Medina, A.I.M.; de Jongh, J.F.; van de Sluis, J.; Voronov, A.; Englund, C.; Bril, R.J.; Salunkhe, H.; Arrúe, Á.; et al. Cooperative automated maneuvering at the 2016 grand cooperative driving challenge. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1213–1226. [Google Scholar] [CrossRef] [Green Version]
- Petrov, P.; Nashashibi, F. Adaptive steering control for autonomous lane change maneuver. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 835–840. [Google Scholar]
- Hu, X.; Sun, J. Trajectory optimization of connected and autonomous vehicles at a multilane freeway merging area. Transp. Res. Part Emerg. Technol. 2019, 101, 111–125. [Google Scholar] [CrossRef]
- Parra, I.; García-Morcillo, A.; Izquierdo, R.; Alonso, J.; Fernández-Llorca, D.; Sotelo, M.A. Analysis of ITS-G5A V2X communications performance in autonomous cooperative driving experiments. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017; pp. 1899–1903. [Google Scholar]
- Englund, C.; Chen, L.; Ploeg, J.; Semsar-Kazerooni, E.; Voronov, A.; Bengtsson, H.H.; Didoff, J. The grand cooperative driving challenge 2016: boosting the introduction of cooperative automated vehicles. IEEE Wirel. Commun. 2016, 23, 146–152. [Google Scholar] [CrossRef] [Green Version]
- Sancar, F.E. Adaptive Cooperative Highway Platooning and Merging. Doctoral Thesis, University of Waterloo, Waterloo, ON, Canada, 2017. [Google Scholar]
- Sun, L.; Peng, C.; Zhan, W.; Tomizuka, M. A Fast Integrated Planning and Control Framework for Autonomous Driving via Imitation Learning. In Proceedings of the Dynamic Systems and Control Conference, Atlanta, GA, USA, 30 September–3 October 2018. [Google Scholar]
- Claussmann, L.; Revilloud, M.; Gruyer, D.; Glaser, S. A Review of Motion Planning for Highway Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1826–1848. [Google Scholar] [CrossRef] [Green Version]
- Hidalgo, C.; Lattarulo, R.; Pérez, J.; Asua, E. Hybrid trajectory planning approach for roundabout merging scenarios. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–6. [Google Scholar]
- Garrido, F.; González, L.; Milanés, V.; Rastelli, J.P.; Nashashibi, F. A Two-Stage Real-Time Path Planning: Application to the Overtaking Manuever. IEEE Access 2020, 8, 128730–128740. [Google Scholar] [CrossRef]
- Lattarulo, R.; Pérez, J.; Dendaluce, M. A complete framework for developing and testing automated driving controllers. IFAC-PapersOnLine 2017, 50, 258–263. [Google Scholar] [CrossRef]
- Lattarulo, R.; He, D.; Pérez, J. A linear model predictive planning approach for overtaking manoeuvres under possible collision circumstances. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1340–1345. [Google Scholar]
- Ploeg, J.; Shukla, D.P.; van de Wouw, N.; Nijmeijer, H. Controller synthesis for string stability of vehicle platoons. IEEE Trans. Intell. Transp. Syst. 2013, 15, 854–865. [Google Scholar] [CrossRef] [Green Version]
- Swaroop, D. String Stability of Interconnected Systems: An Application to Platooning in Automated Highway Systems. 1997. Available online: https://escholarship.org/uc/item/86z6h1b1 (accessed on 15 March 2021).
- Lattarulo, R.; Marcano, M.; Pérez, J. Overtaking maneuver for automated driving using virtual environments. In Computer Aided Systems Theory; Springer: Berlin/Heidelberg, Germany, 2017; pp. 446–453. [Google Scholar] [CrossRef]
- Hidalgo, C.; Lattarulo, R.; Pérez, J.; Asua, E. Intelligent Longitudinal Merging Maneuver at Roundabouts Based on Hybrid Planning Approach. In International Conference on Computer Aided Systems Theory; Springer: Berlin/Heidelberg, Germany, 2019; pp. 129–136. [Google Scholar]
- Parra, A.; Rodríguez, A.J.; Zubizarreta, A.; Pérez, J. Validation of a Real-Time Capable Multibody Vehicle Dynamics Formulation for Automotive Testing Frameworks Based on Simulation. IEEE Access 2020, 8, 213253–213265. [Google Scholar] [CrossRef]
- Cuadrado, J.; Vilela, D.; Iglesias, I.; Martín, A.; Peña, A. A multibody model to assess the effect of automotive motor in-wheel configuration on vehicle stability and comfort. In Proceedings of the ECCOMAS Multibody Dynamics, Zagreb, Croatia, 1–4 July 2013. [Google Scholar]
- Matute-Peaspan, J.A.; Zubizarreta-Pico, A.; Diaz-Briceno, S.E. A Vehicle Simulation Model and Automated Driving Features Validation for Low-Speed High Automation Applications. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Pérez, J.; Godoy, J.; Villagrá, J.; Onieva, E. Trajectory generator for autonomous vehicles in urban environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 409–414. [Google Scholar]
- Pérez, J.; Nashashibi, F.; Lefaudeux, B.; Resende, P.; Pollard, E. Autonomous docking based on infrared system for electric vehicle charging in urban areas. Sensors 2013, 13, 2645–2663. [Google Scholar] [CrossRef] [Green Version]
- Lattarulo, R.; Pérez Rastelli, J. A Hybrid Planning Approach Based on MPC and Parametric Curves for Overtaking Maneuvers. Sensors 2021, 21, 595. [Google Scholar] [CrossRef] [PubMed]
- Villagra, J.; Milanés, V.; Pérez, J.; Godoy, J. Smooth path and speed planning for an automated public transport vehicle. Robot. Auton. Syst. 2012, 60, 252–265. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Lattarulo, R.; Milanés, V.; Nashashibi, F. Continuous curvature planning with obstacle avoidance capabilities in urban scenarios. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1430–1435. [Google Scholar]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Godoy, J.; Artuñedo, A.; Villagra, J. Self-generated osm-based driving corridors. IEEE Access 2019, 7, 20113–20125. [Google Scholar] [CrossRef]
- Artuñedo, A.; Godoy, J.; Villagra, J. A primitive comparison for traffic-free path planning. IEEE Access 2018, 6, 28801–28817. [Google Scholar] [CrossRef]
- Lattarulo, R.; González, L.; Martí, E.; Matute, J.; Marcano, M.; Pérez, J. Urban Motion Planning Framework Based on N-Bézier Curves Considering Comfort and Safety. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Flores, C.; Milanés, V.; Nashashibi, F. Using fractional calculus for cooperative car-following control. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 907–912. [Google Scholar]
- Swaroop, D.; Rajagopal, K. A review of constant time headway policy for automatic vehicle following. In Proceedings of the ITSC 2001. 2001 IEEE Intelligent Transportation Systems. Proceedings (Cat. No. 01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 65–69. [Google Scholar]
- Toledo, T.; Zohar, D. Modeling duration of lane changes. Transp. Res. Rec. 2007, 1999, 71–78. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Benefits | Disadvantage | |
|---|---|---|
| CACC | Allows short gaps between vehicles | No actions/usage in the lateral component |
| Ease of handling the gap for cut-in, cut-out maneuvers | ||
| Easy implementation | Difficult lateral displacement | |
| Low computational cost | ||
| String stability guaranteed | ||
| Hybrid trajectory | Actions in both longitudinal and lateral components | Average to high computational cost |
| Allows lateral maneuvers such as lane-change | ||
| Collision avoidance through projections of future states | No short gaps allowed | |
| Passenger comfort guaranteed | ||
| Easy-to-medium implementation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hidalgo, C.; Lattarulo, R.; Flores, C.; Pérez Rastelli, J. Platoon Merging Approach Based on Hybrid Trajectory Planning and CACC Strategies. Sensors 2021, 21, 2626. https://doi.org/10.3390/s21082626
Hidalgo C, Lattarulo R, Flores C, Pérez Rastelli J. Platoon Merging Approach Based on Hybrid Trajectory Planning and CACC Strategies. Sensors. 2021; 21(8):2626. https://doi.org/10.3390/s21082626
Chicago/Turabian StyleHidalgo, Carlos, Ray Lattarulo, Carlos Flores, and Joshué Pérez Rastelli. 2021. "Platoon Merging Approach Based on Hybrid Trajectory Planning and CACC Strategies" Sensors 21, no. 8: 2626. https://doi.org/10.3390/s21082626