
Computationally Efficient Direction-of-Arrival Estimation Algorithms for a Cubic Coprime Array


Abstract
:1. Introduction
- (a)
- We propose a TA-MUSIC algorithm with CCA geometry to enable massive MIMOs to fully employ DOFs and achieve superior DOA estimation by employing both the auto-covariance matrix and the mutual covariance matrix of the entire array. In addition, we verify that by using the coprime property, the proposed algorithm can suppress the ambiguity problem.
- (b)
- We propose an E-MUSIC algorithm for 2D DOA estimation, which can effectively decrease the complexity of the classic MUSIC algorithm. After utilizing the ESPRIT algorithm to initialize and obtain a rough estimation, we then conduct a fine search within a smaller sector to achieve lower complexity.
- (c)
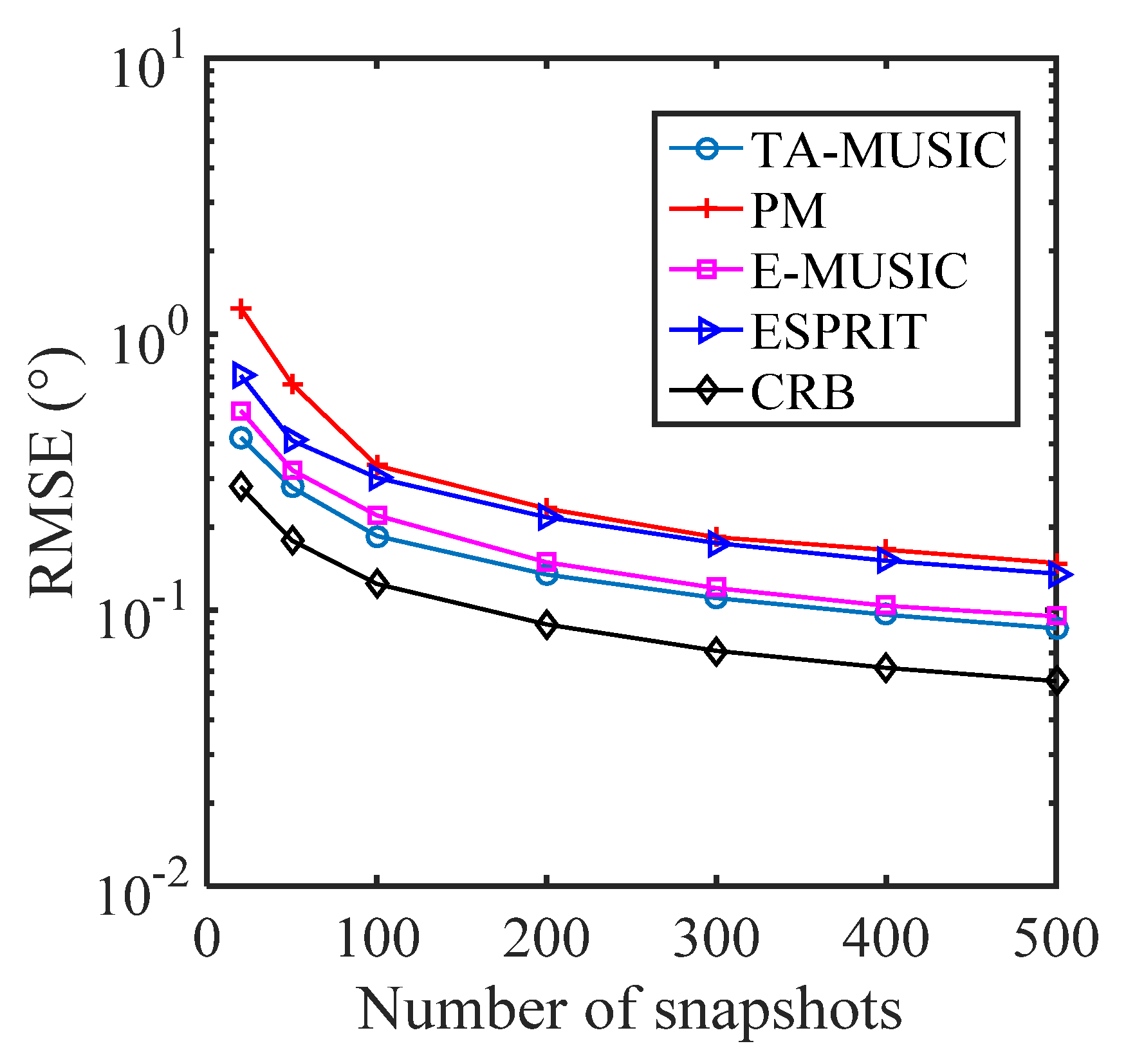
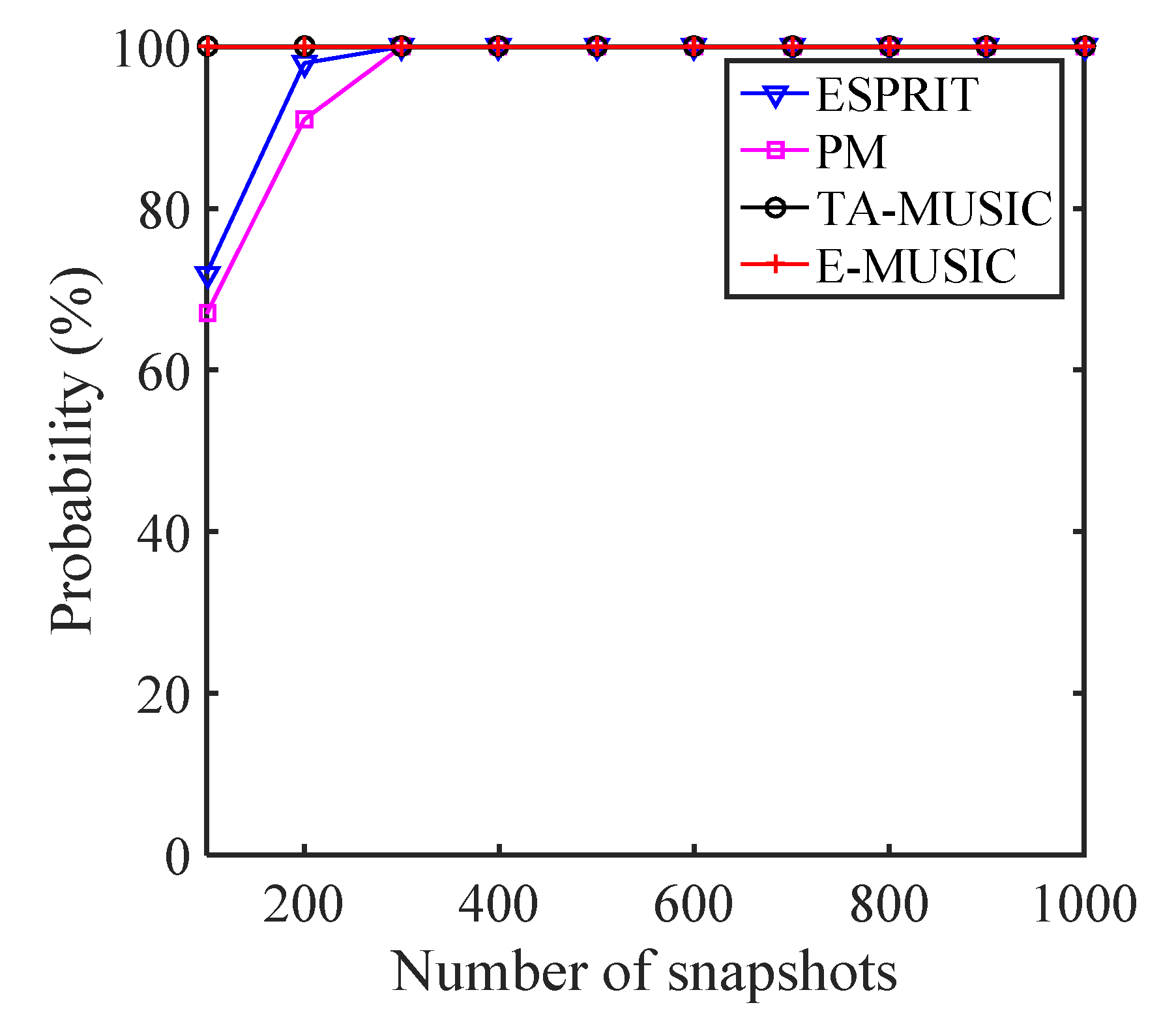
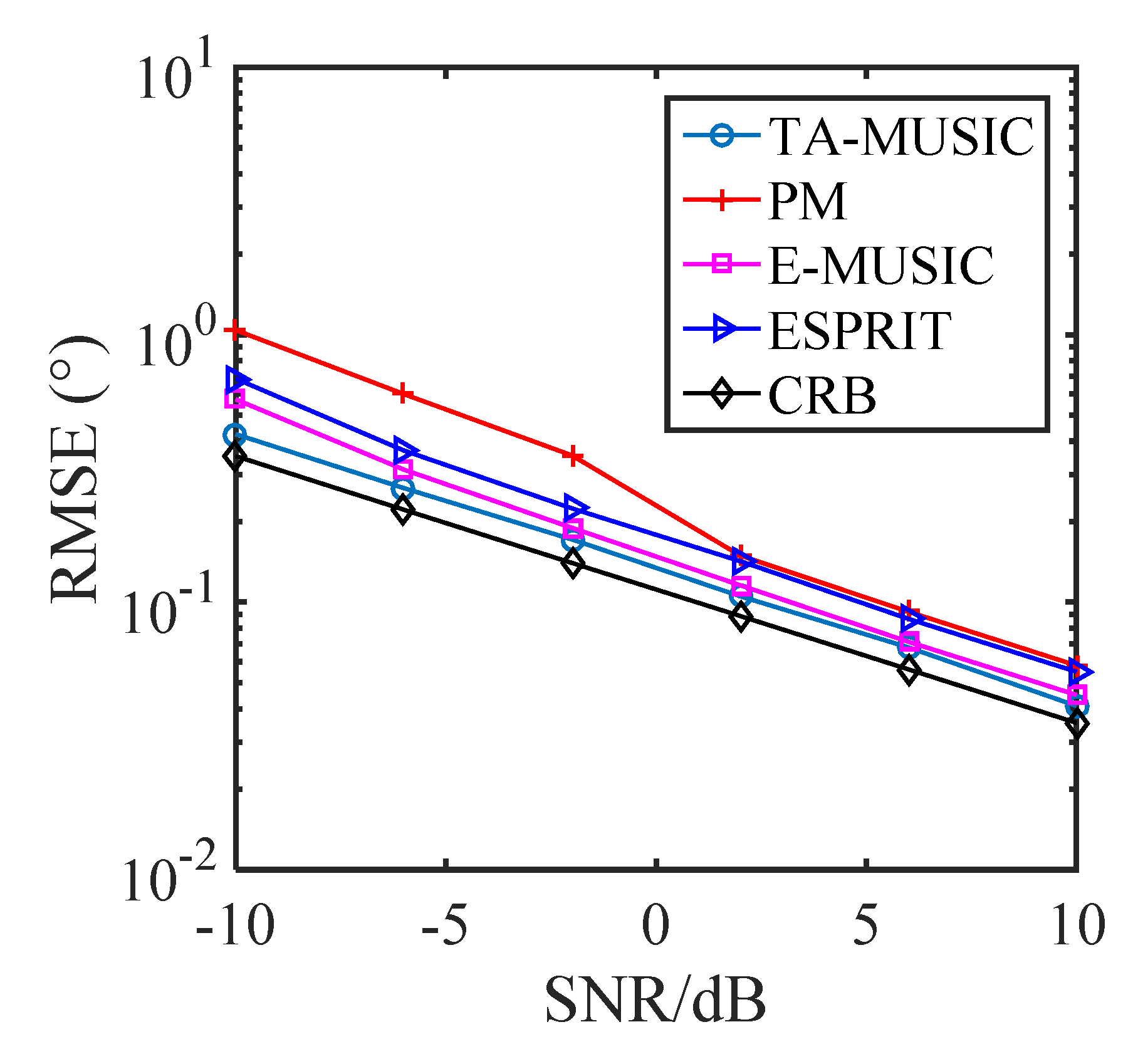
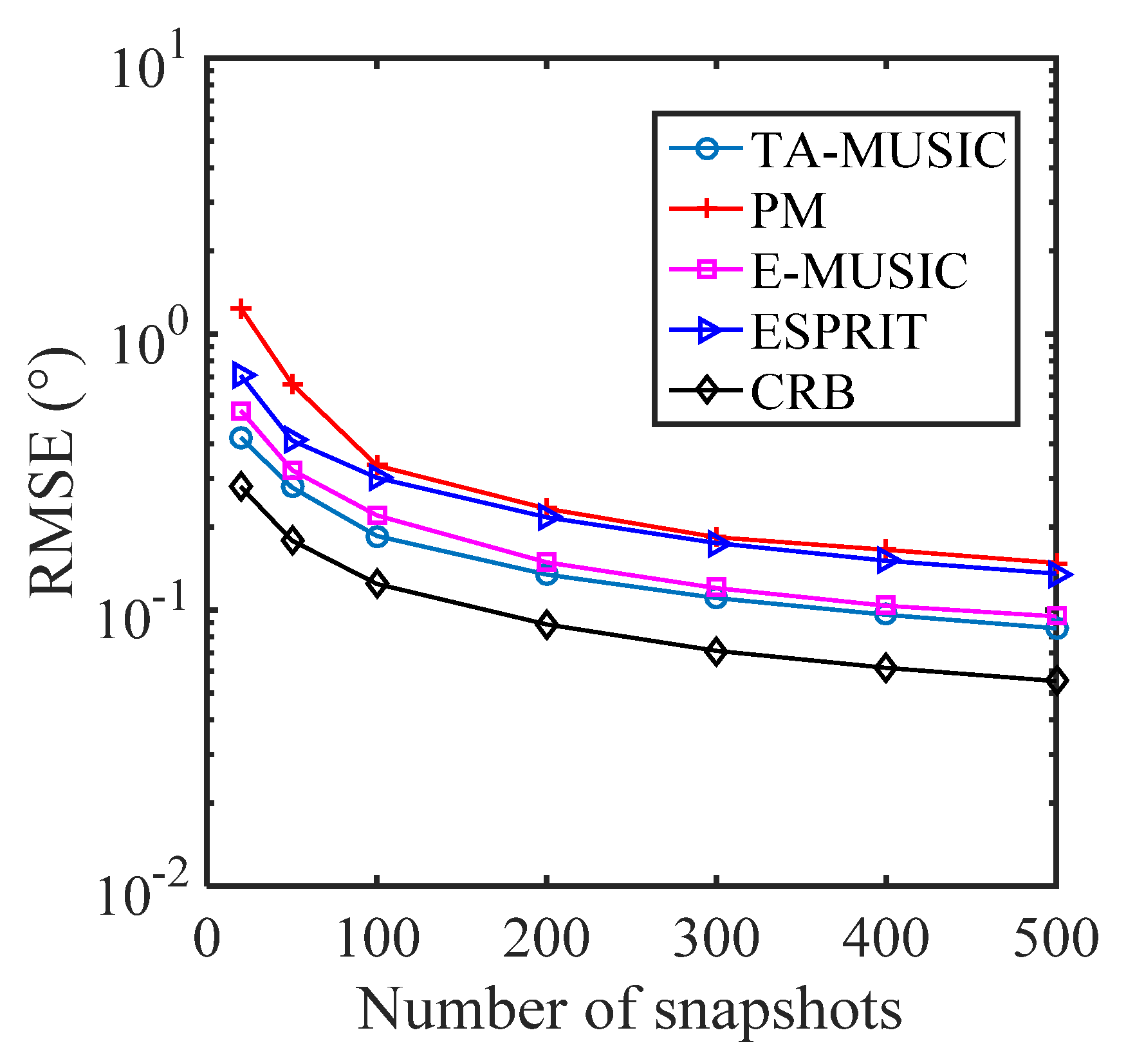
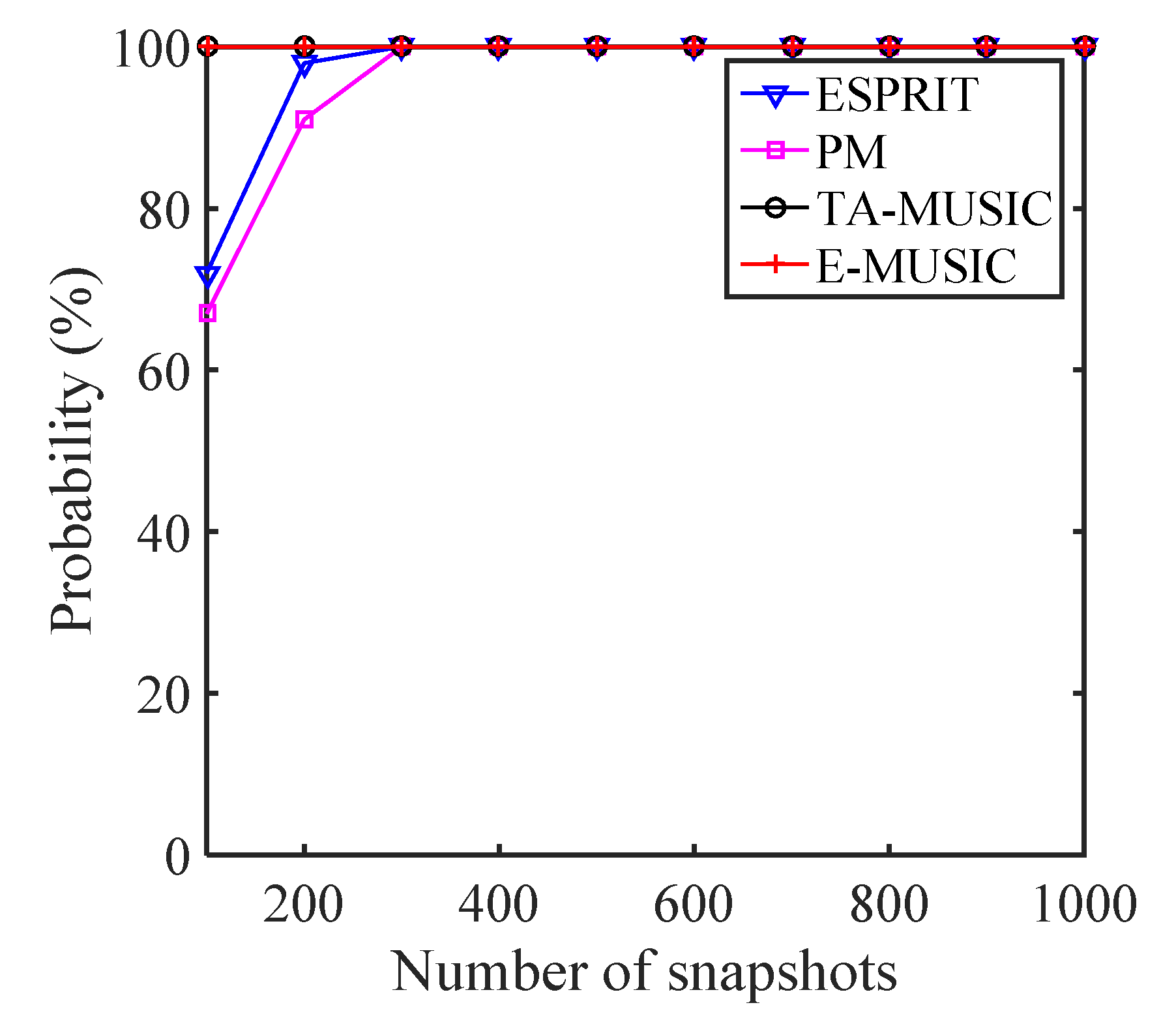
- Our numerical simulation results confirm that the proposed algorithms outperform the classical ESPRIT algorithm and the PM algorithm in DOA estimation.
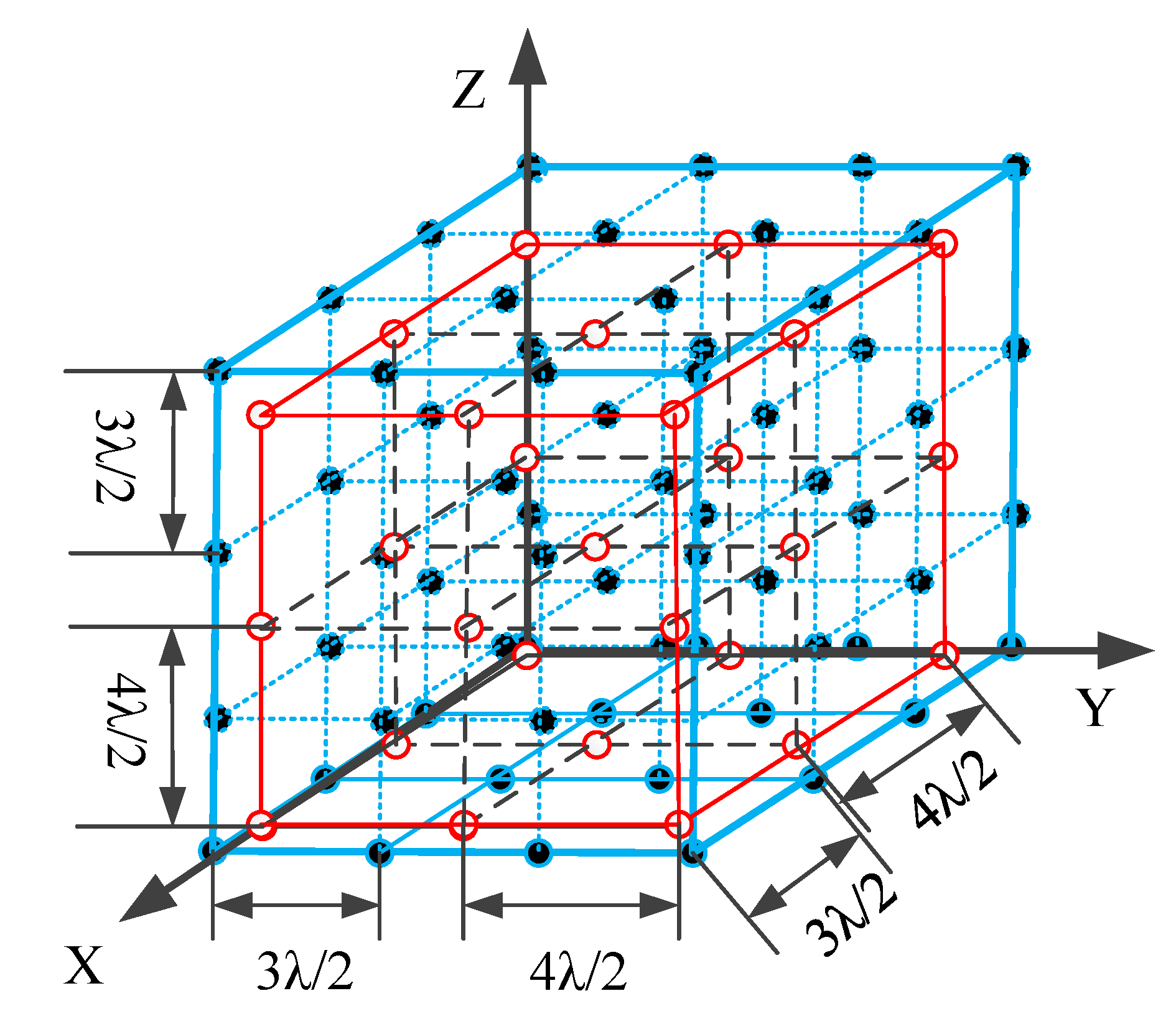
2. Signal Model
3. Proposed Method for DOA Estimation
3.1. Review
3.2. TA-MUSIC Algorithm
3.3. The E-MUSIC Algorithm
3.4. Detailed Steps
4. Performance Analysis
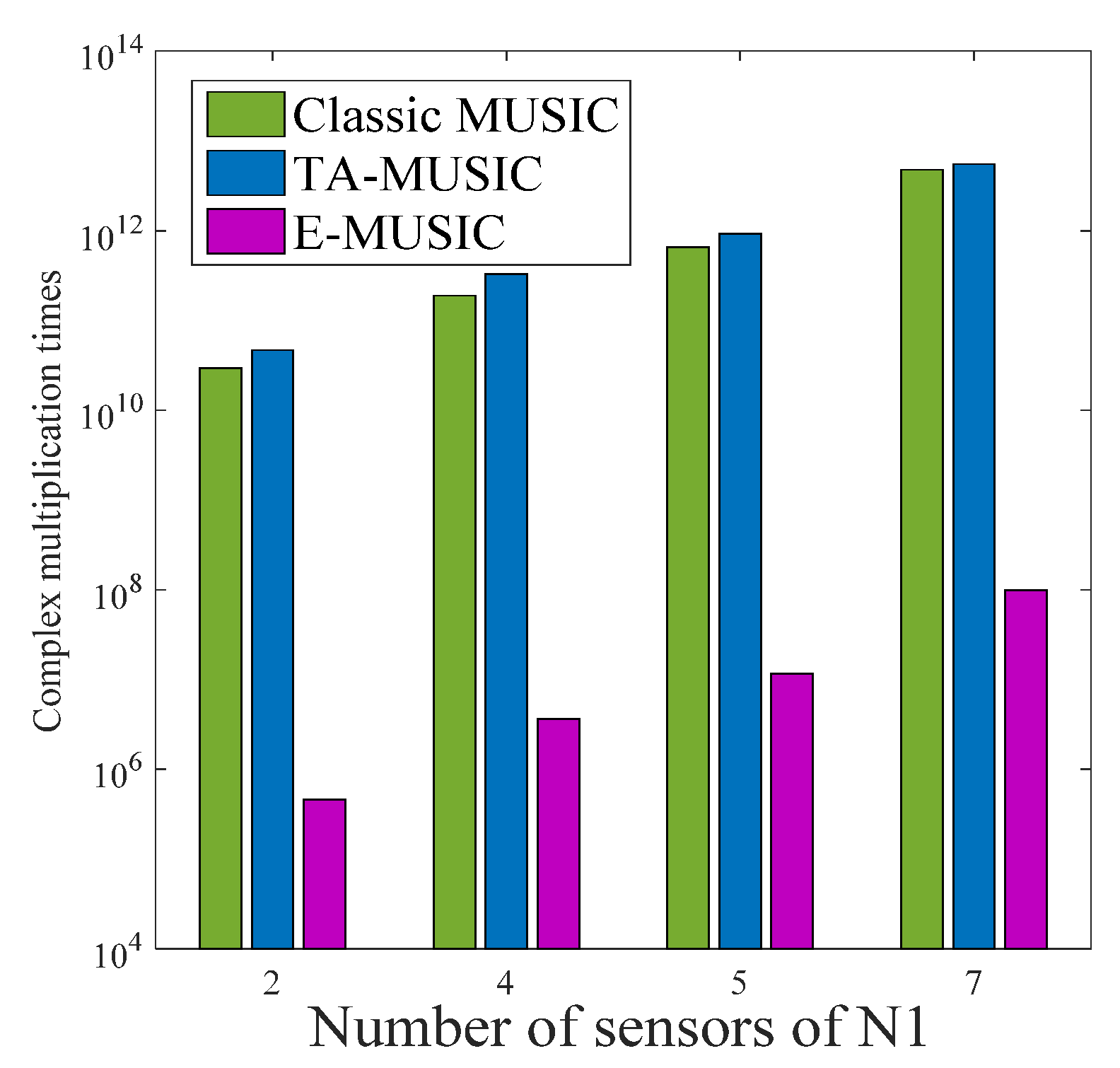
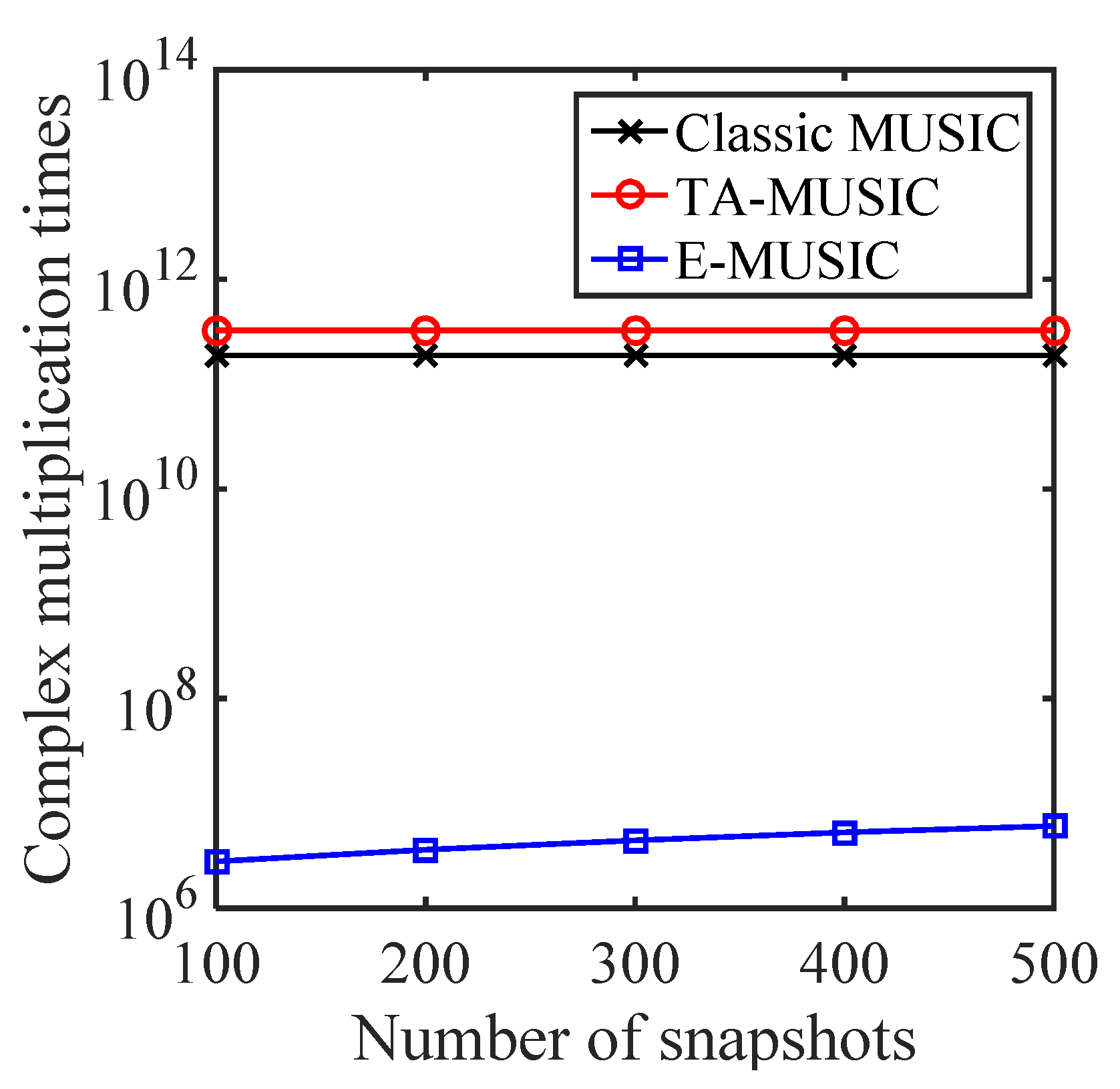
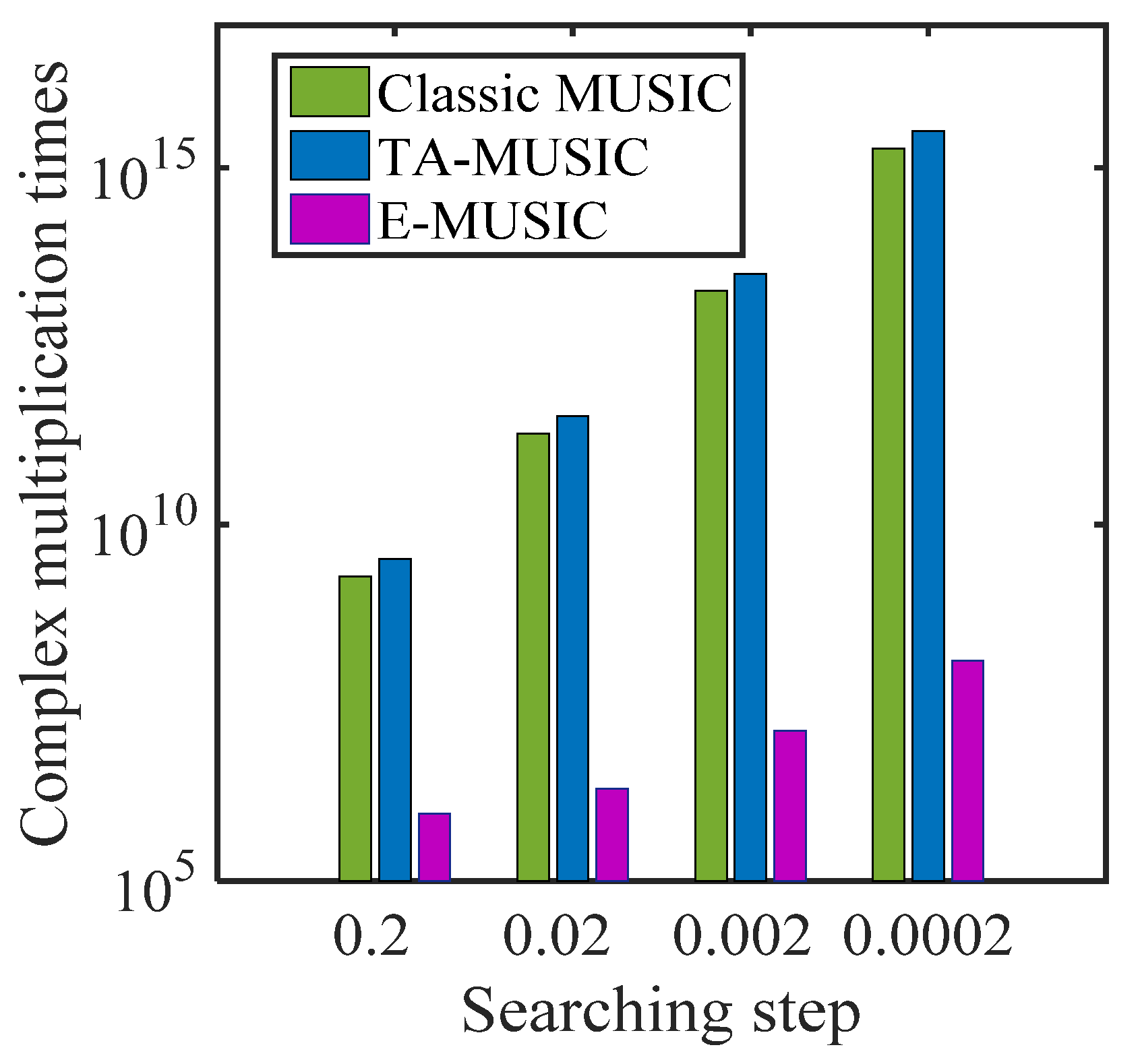
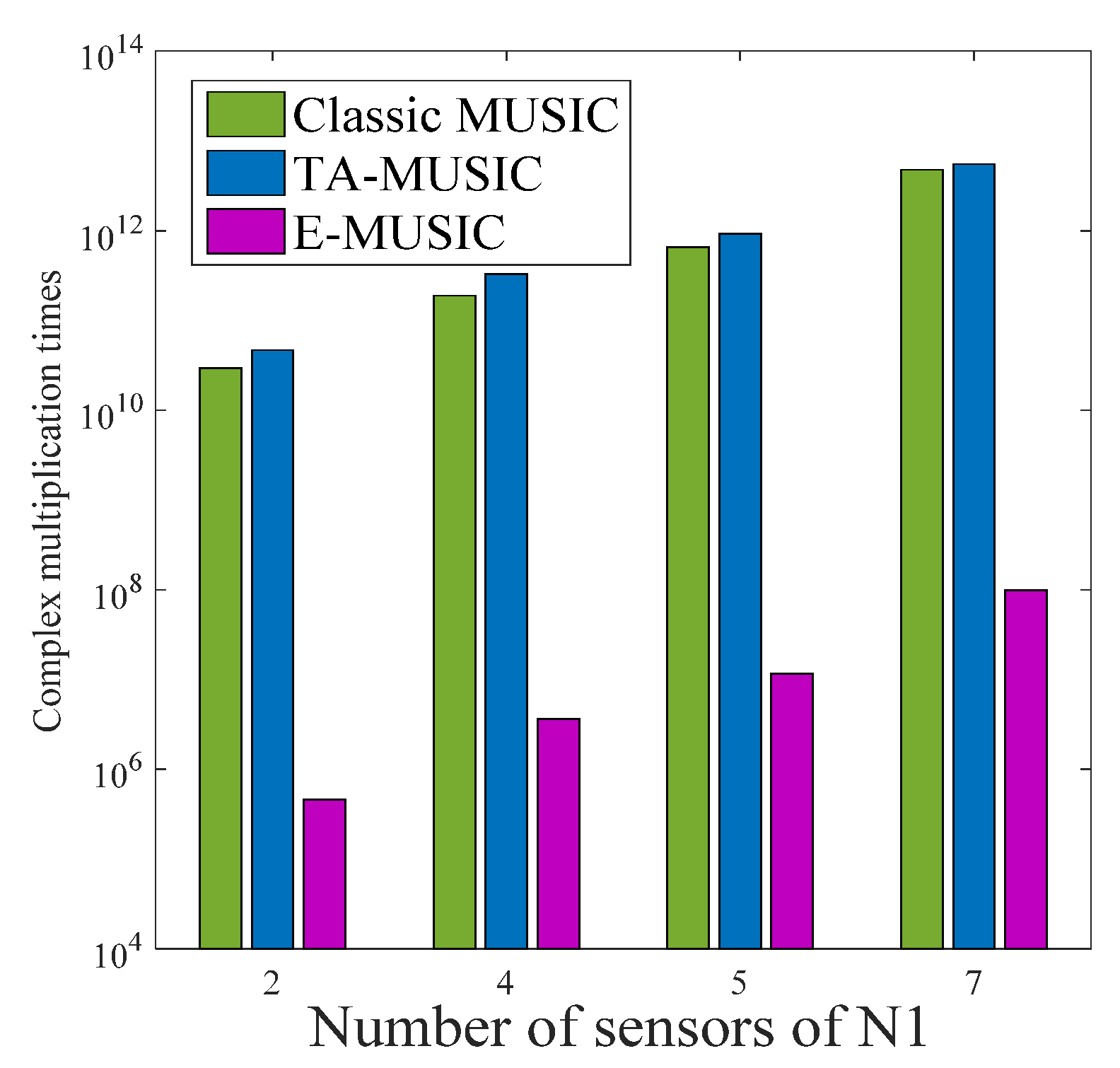
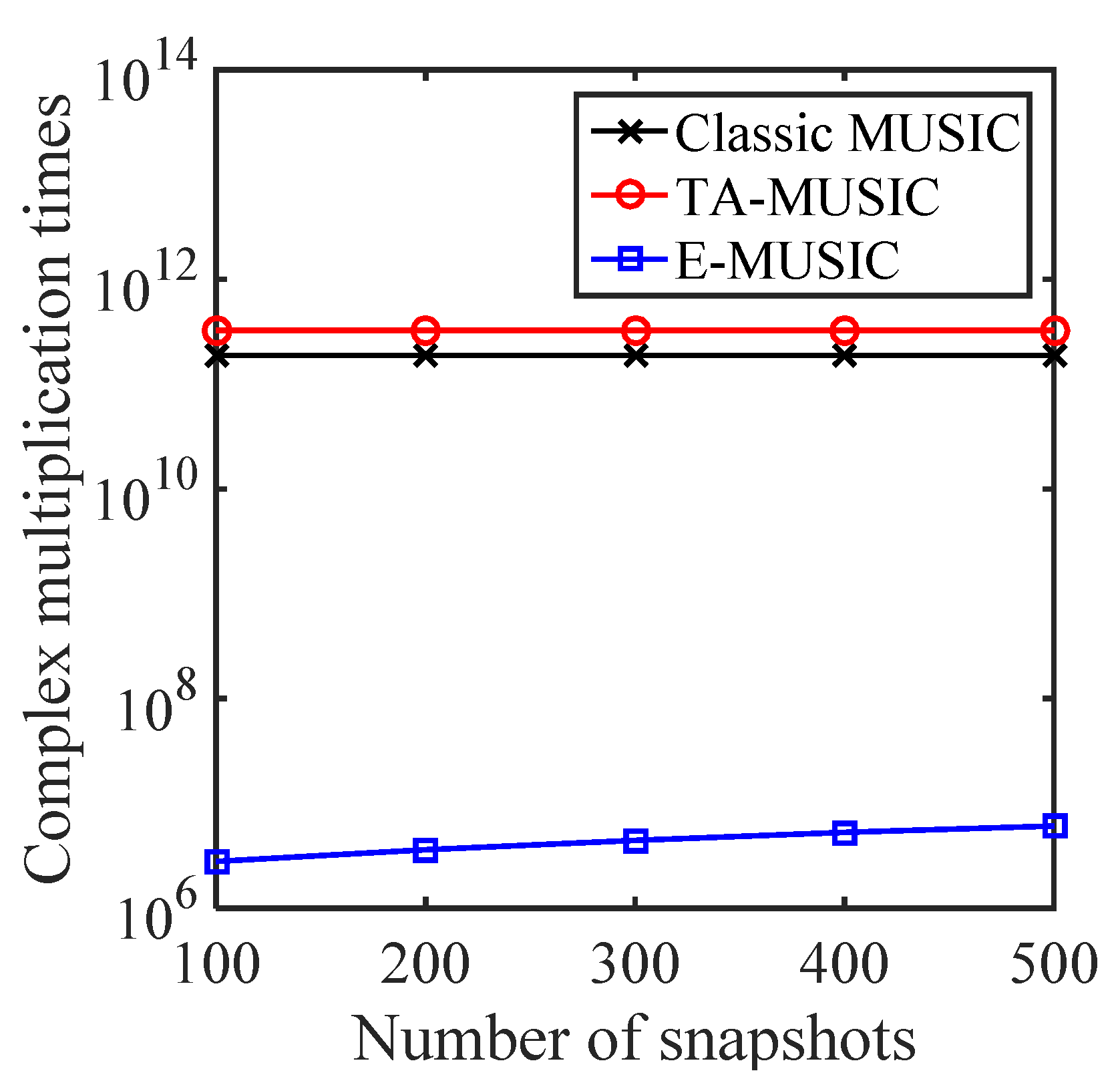
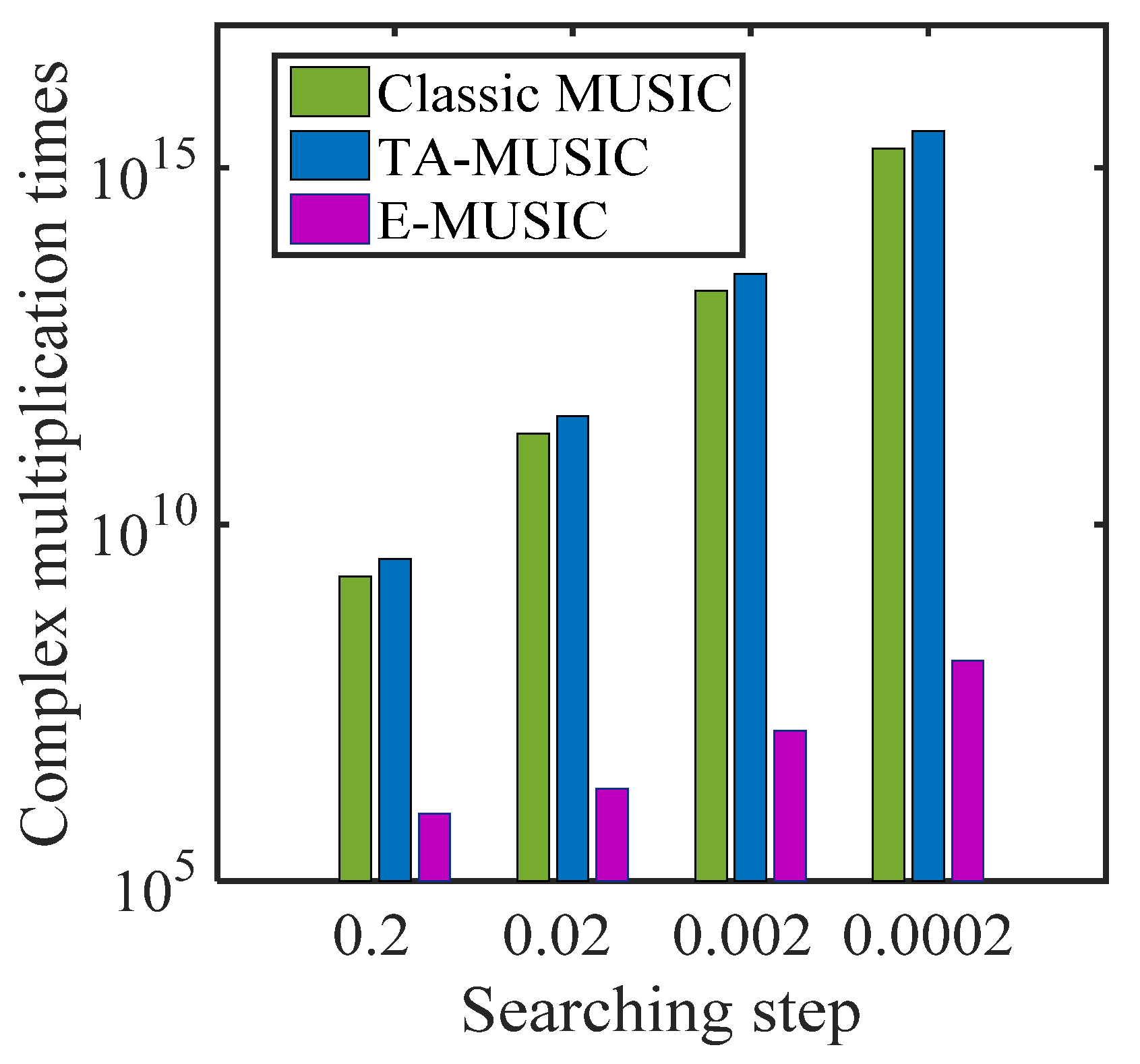
4.1. Computational Complexity
4.2. Degree of DOF
4.3. Advantages
- The proposed TA-MUSIC performs better DOA estimations by employing all of the array information, including the auto-covariance matrix and the mutual covariance matrix, whereas E-MUSIC only utilizes the auto-covariance matrix information. In addition, TA-MUSIC can fully achieve DOFs of , while the algorithms in [34,35,36] only achieve DOFs. Furthermore, E-MUSIC can obtain DOFs, which are larger than .
- The proposed TA–MUSIC algorithm can attain paired angles automatically and outperforms the conventional ESPRIT and PM algorithms in DOA estimation performance.
4.4. Cramer–Rao Bound
5. Simulation Results
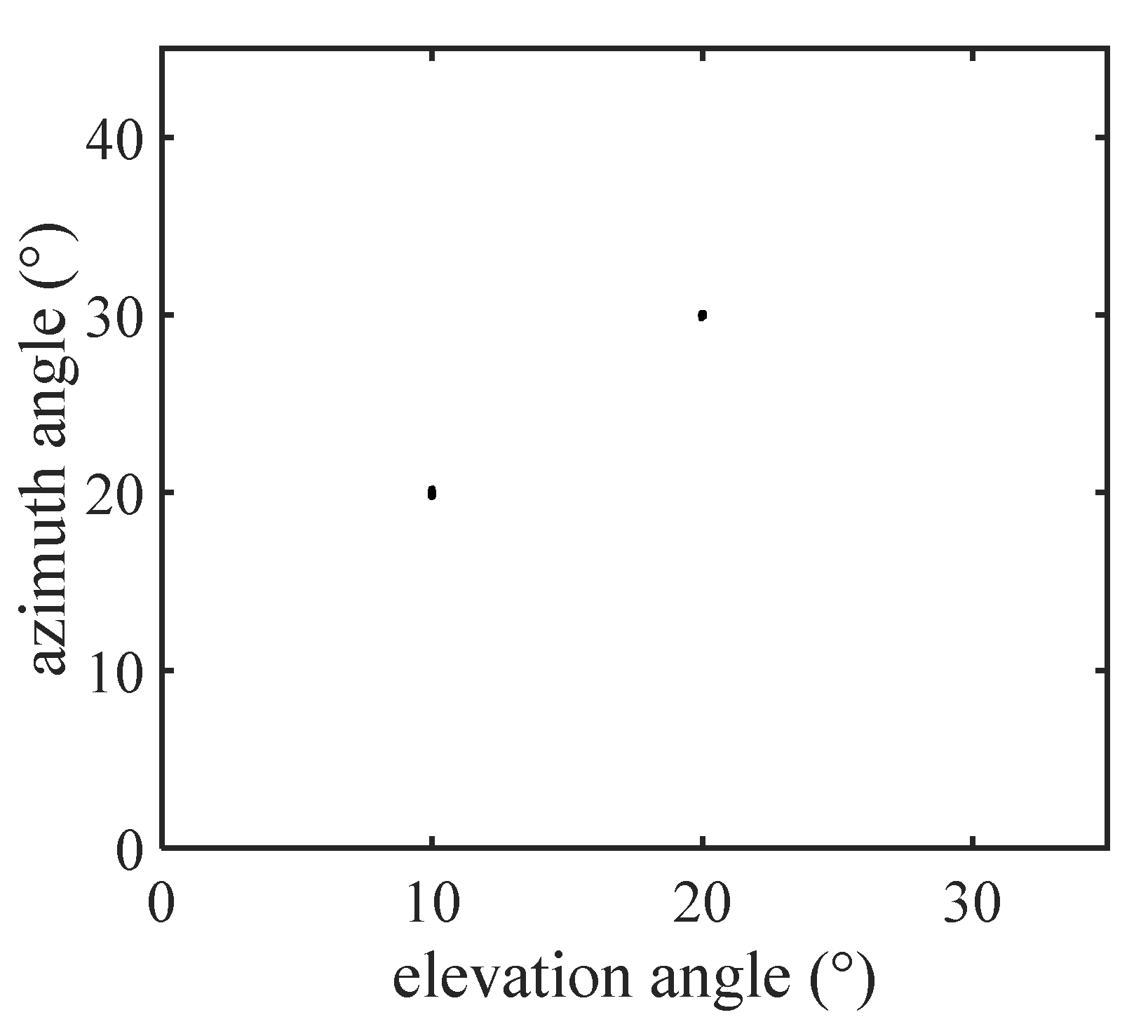
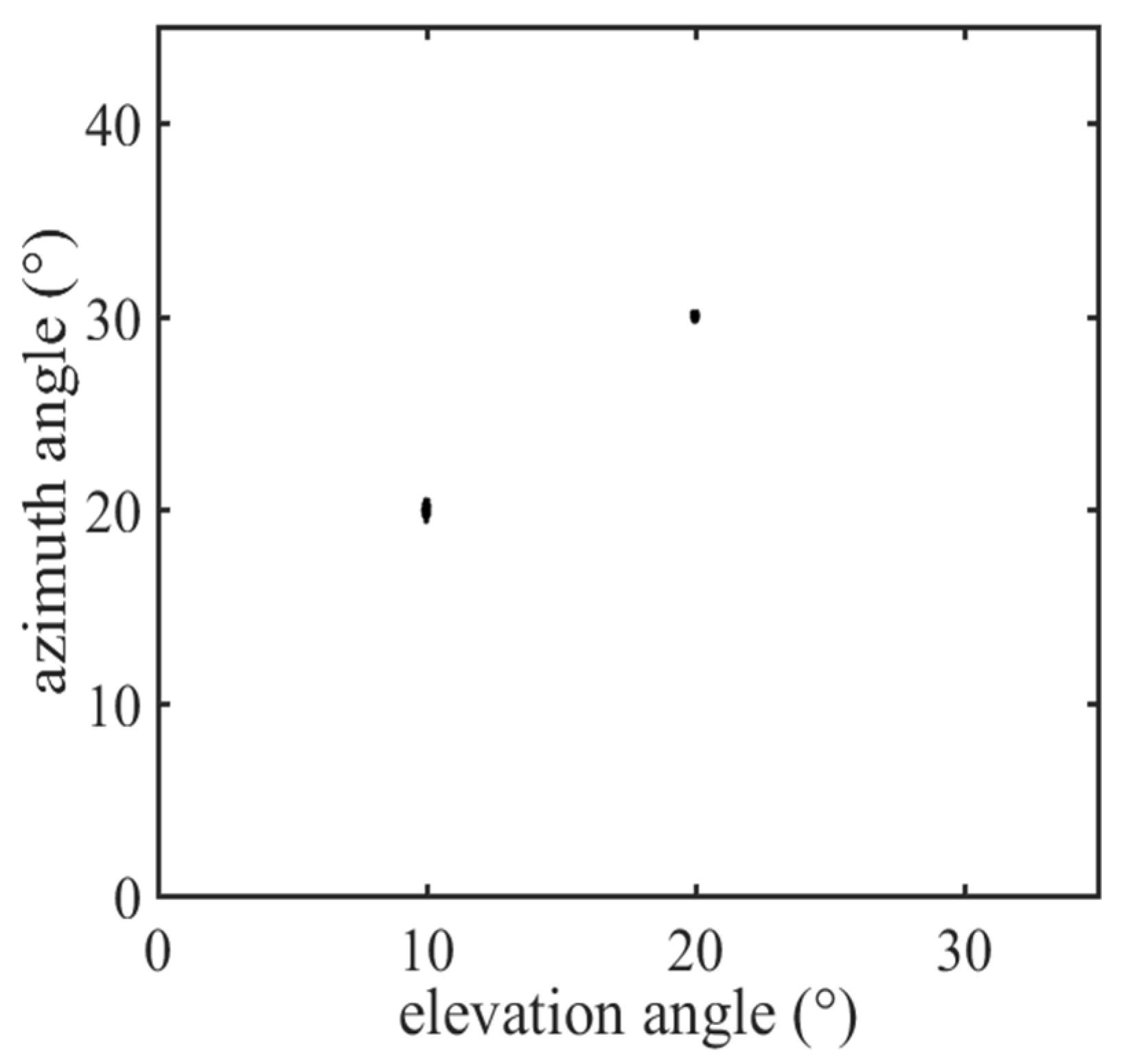
5.1. Comparison of the DOA Estimation Performance of Different Algorithms
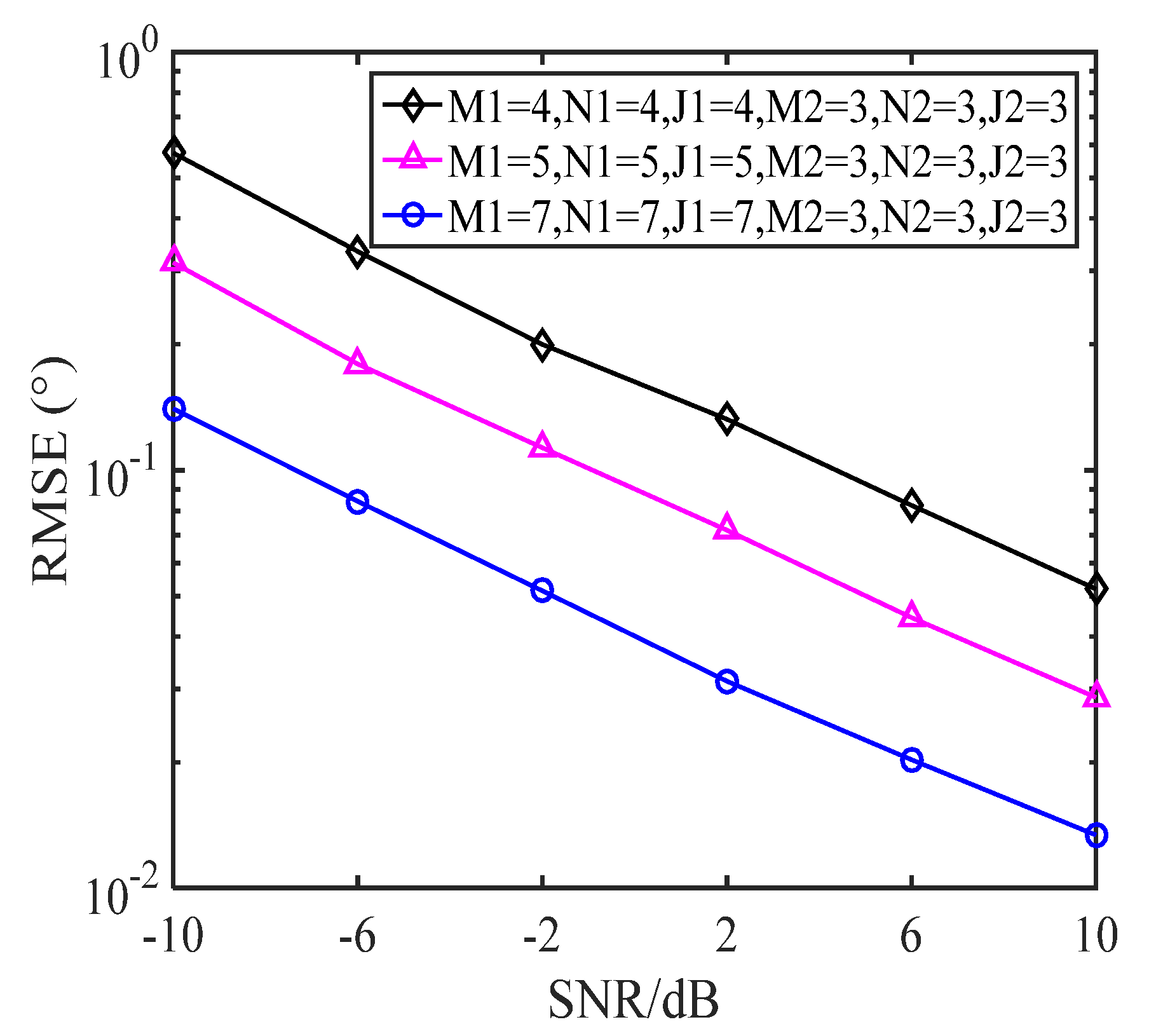
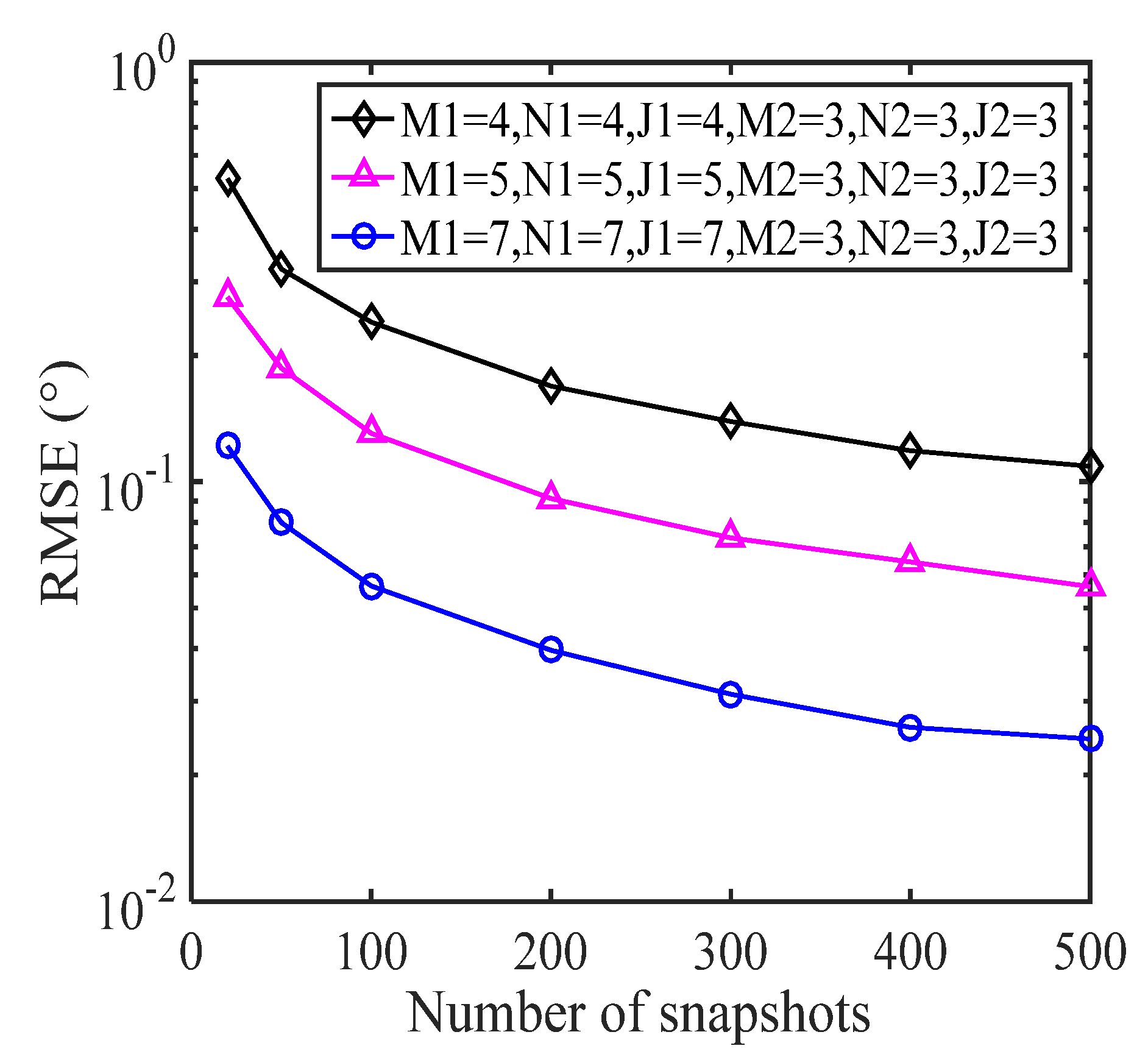
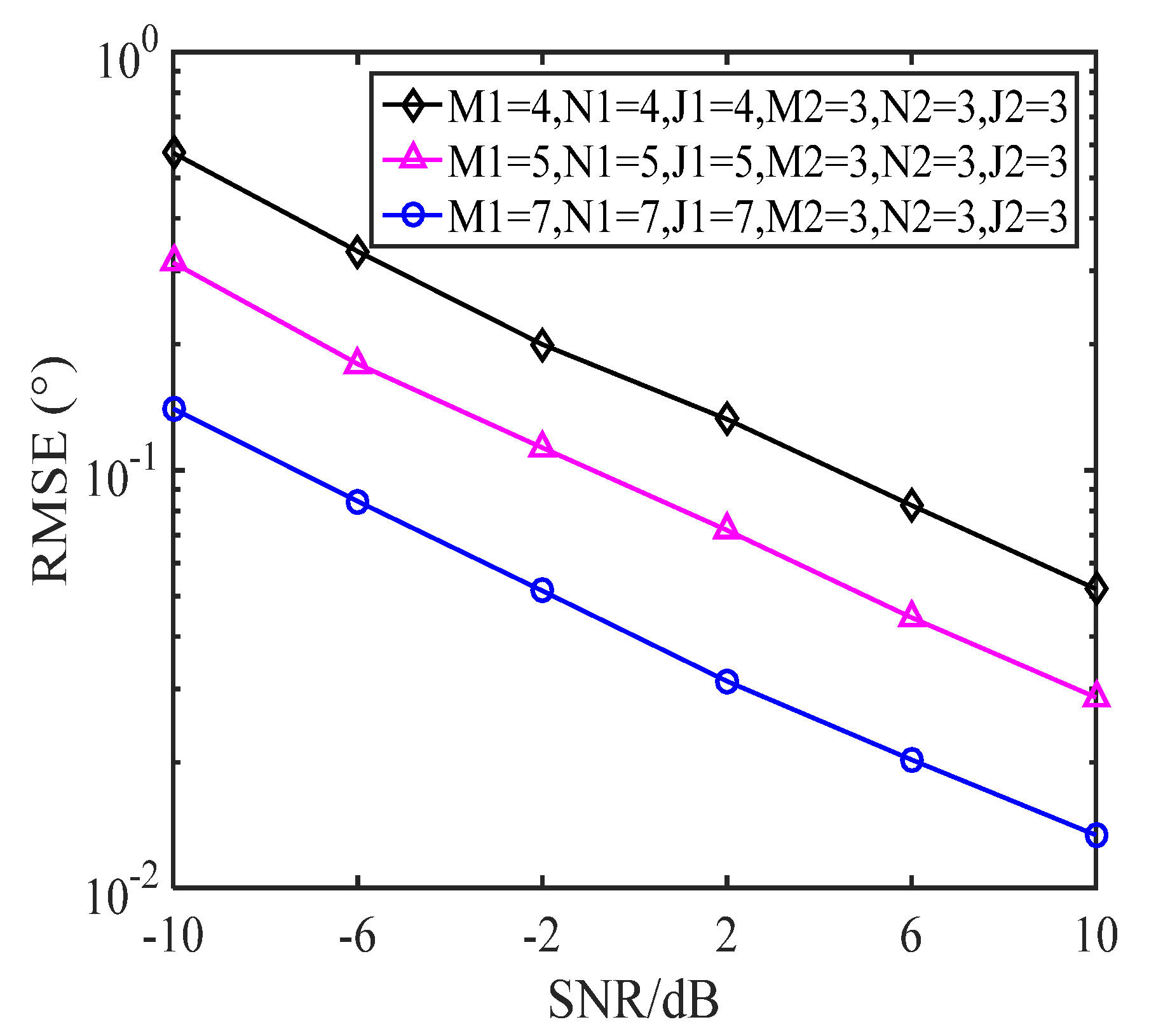
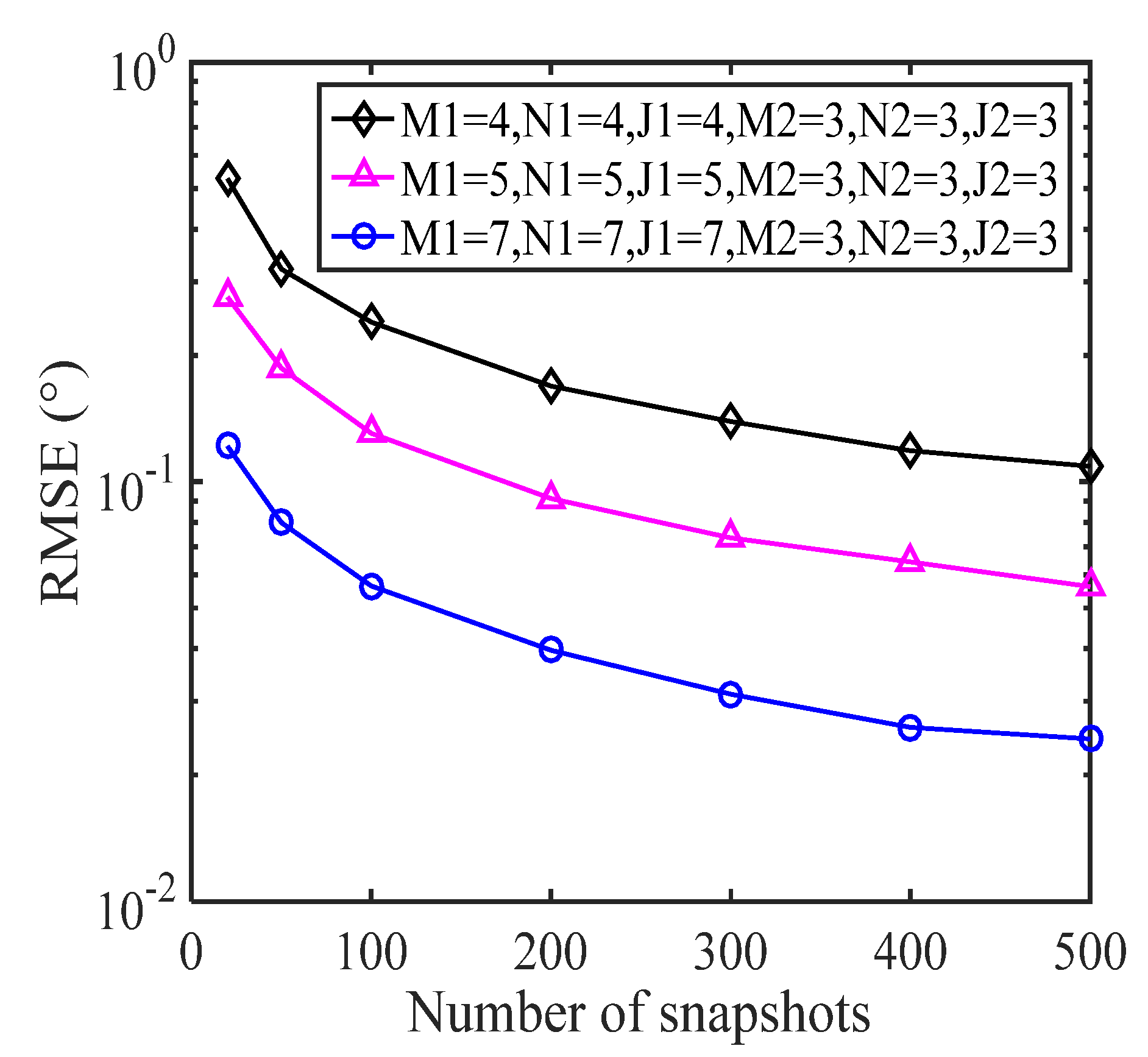
5.2. RMSE with a Varying Number of Sensors
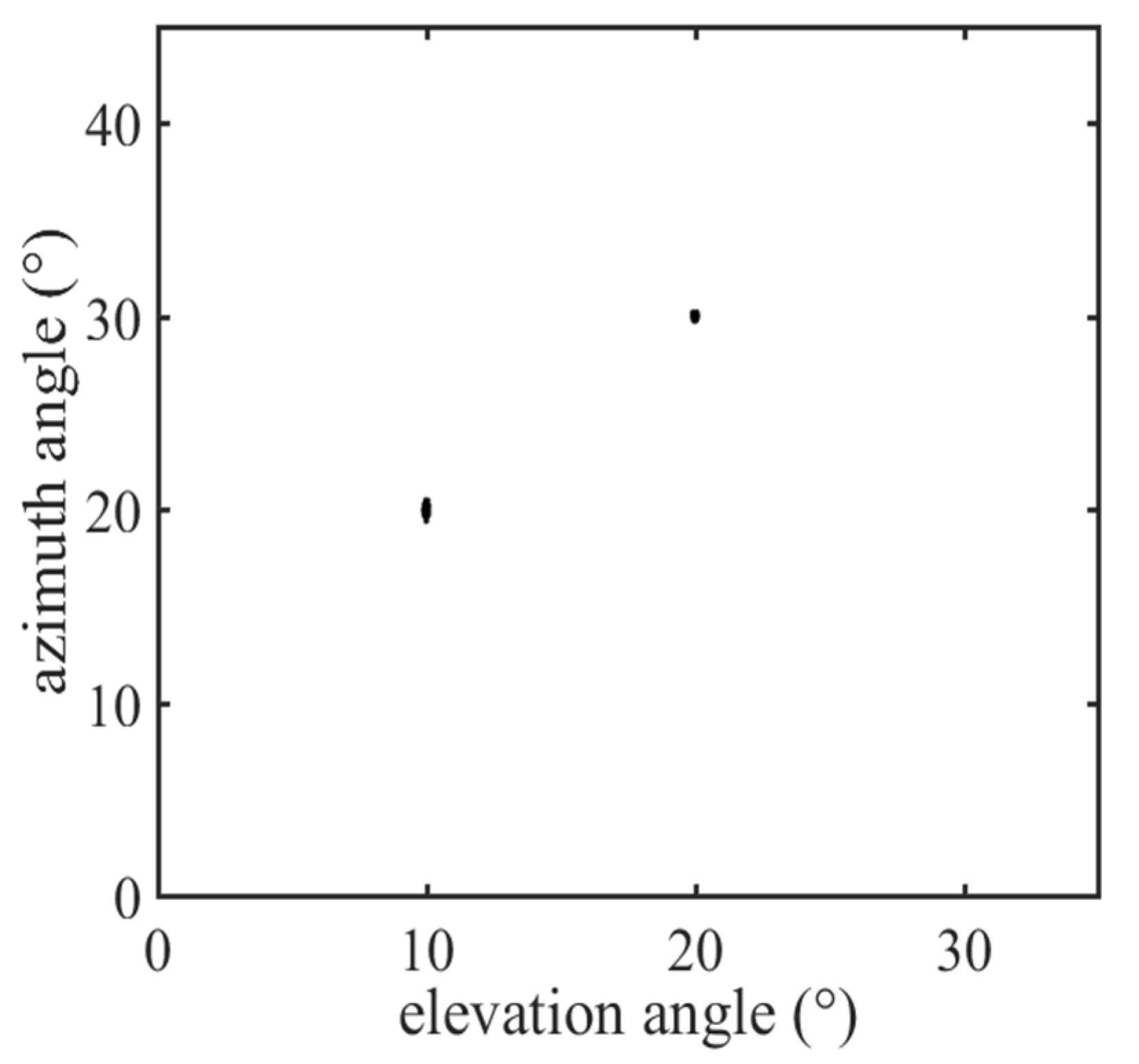
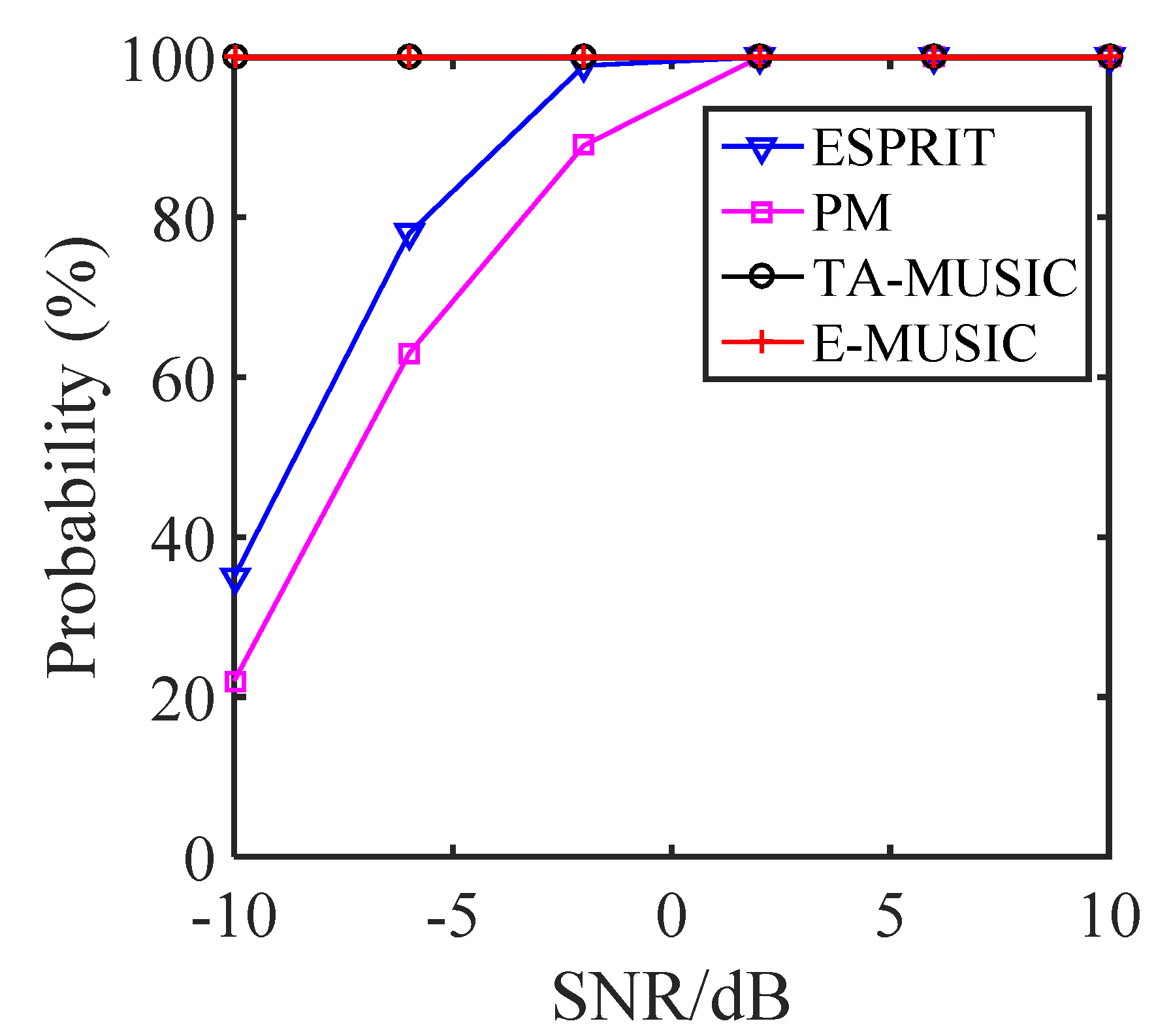
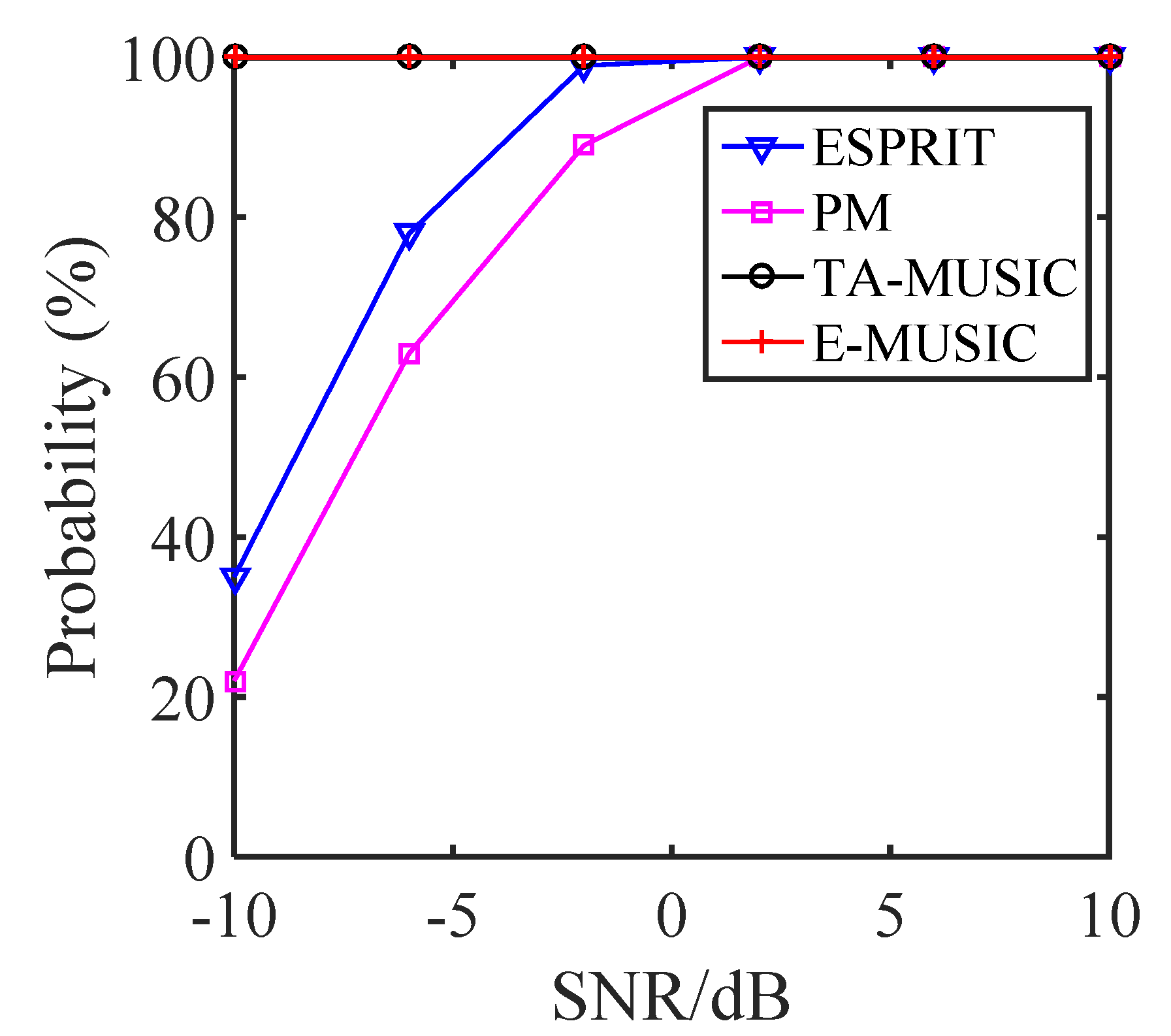
5.3. Resolution Performance
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- FishIer, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference, Philadelphia, PA, USA, 29–29 April 2004; pp. 71–78. [Google Scholar]
- Fishler, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R.A. Spatial diversity in radars-models and detection performance. IEEE Trans. Signal Processing 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Gesbert, D.; Kountouris, M.; Robert, W.H., Jr.; Chae, C.B.; Salzer, T. Shifting the MIMO paradigm. IEEE Signal Processing Mag. 2007, 24, 36–46. [Google Scholar] [CrossRef]
- Brookner, E. Aspects of Modern Radar; Artech House: Norwood, MA, USA, 1988. [Google Scholar]
- Chandhar, P.; Danev, D.; Larsson, E. Massive MIMO for Communications with Drone Swarms. IEEE Trans. Wirel. Commun. 2017, 17, 1604–1629. [Google Scholar] [CrossRef] [Green Version]
- Chandhar, P.; Larsson, E. Massive MIMO for Drone Communications: Case Studies and Future Directions. arXiv 2017, arXiv:1711.07668. [Google Scholar]
- Cui, Y.; Fang, X. A massive MIMO-based adaptive multi-stream beamforming scheme for high-speed railway. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 259. [Google Scholar] [CrossRef]
- Gao, Y.; Ma, R.; Wang, Y.; Zhang, Q.; Parini, C. Stacked Patch Antenna with Dual-Polarization and Low Mutual Coupling for Massive MIMO. IEEE Trans. Antennas Propag. 2019, 64, 4544–4549. [Google Scholar] [CrossRef]
- Marzetta, T.L. Noncooperative cellular wireless with unlimited numbers of base station antennas. IEEE Trans. Wirel. Commun. 2010, 9, 3590–3600. [Google Scholar] [CrossRef]
- Rusek, F.; Persson, D.; Lau, B.K.; Larsson, E.G.; Marzetta, T.L.; Tufvesson, F. Scaling up MIMO: Opportunities and challenges with very large arrays. IEEE Signal Processing Mag. 2013, 30, 40–60. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Dai, L.; Han, S.; Chih-Lin, I.; Heath, R.W. Energy-Efficient Hybrid Analog and Digital Precoding for MmWave MIMO Systems with Large Antenna Arrays. IEEE J. Sel. Areas Commun. 2016, 34, 998–1009. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Qi, C.; Wu, Y.; Huang, Y. Energy-efficient transceiver design for hybrid sub-array architecture MIMO systems. IEEE Access 2017, 4, 9895–9905. [Google Scholar] [CrossRef]
- Gucluoglu, T.; Amar, S.E. Performance analysis of a cooperative communication system using massive mimo. Pressacademia 2017, 5, 1–9. [Google Scholar]
- Larsson, E.G.; Edfors, O.; Tufvesson, F.; Marzetta, T.L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 2014, 52, 186–195. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Gao, F.; Zhang, S.; Jin, S. A unified transmission strategy for TDD/FDD massive MIMO systems with spatial basis expansion model. IEEE Trans. Veh. Technol. 2017, 66, 3170–3184. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef] [Green Version]
- Qiang, X.; Liu, Y.; Feng, Q.; Zhang, Y.; Qiu, T.; Jin, M. Adaptive DOA Estimation with Low Complexity for Wideband Signals of Massive MIMO Systems. Signal Processing 2020, 176, 107702. [Google Scholar] [CrossRef]
- Kuang, J.; Zhou, Y.; Fei, Z. Joint DOA and channel estimation with data detection based on 2D unitary ESPRIT in massive MIMO systems. Front. Inf. Technol. Electron. Eng. 2017, 18, 841–849. [Google Scholar] [CrossRef]
- Schmidt, R.O. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Prop. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Processing 2002, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Marcos, S.; Marsal, A.; Benidir, M. The propagator method for source bearing estimation. Signal Processing 1995, 42, 121–138. [Google Scholar] [CrossRef]
- Dai, J.; Xu, W.; Zhao, D. Real-valued DOA estimation for uniform linear array with unknown mutual coupling. Signal Processing 2012, 92, 2056–2065. [Google Scholar] [CrossRef]
- Moriya, H.; Ichige, K.; Arai, H.; Hayashi, T.; Matsuno, H.; Nakano, M. Improving Elevation Estimation Accuracy in DOA Estimation: How Planar Arrays Can Be Modified into 3-D Configuration. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2012, E95, 1667–1675. [Google Scholar] [CrossRef]
- Fuchs, J. On the application of the global matched filter to DOA estimation with uniform circular arrays. IEEE Trans. Signal Processing 2001, 49, 702–709. [Google Scholar] [CrossRef]
- Liu, X.; Wang, C. DOA Estimation for L-Shaped Array Based on Complex Fast ICA. Appl. Mech. Mater. 2013, 333–335, 636–639. [Google Scholar] [CrossRef]
- Steinberg, B.D. Principles of Aperture and Array System Design; Wiley: New York, NY, USA, 1976. [Google Scholar]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Processing 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- Pal, P.; Vaidyanathan, P.P. Sparse sensing with coprime samplers and arrays. IEEE Trans. Signal Processing 2011, 59, 573–586. [Google Scholar]
- Zheng, Z.; Zhang, J.; Zhang, J. Joint DOD and DOA estimation of bistatic MIMO radar in the presence of unknown mutual coupling. Signal Processing 2012, 92, 3039–3048. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Zhou, W. Covariance vector sparsity-aware DOA estimation for monostatic MIMO radar with unknown mutual coupling. Signal Processing 2012, 119, 21–27. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the music algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Zhou, C.; Shi, Z.; Gu, Y.; Shen, X. DECOM: DOA estimation with combined MUSIC for coprime array. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 24–26 October 2013; pp. 1–5. [Google Scholar]
- Weng, Z.; Djuric, P. A search-free DOA estimation algorithm forcoprime arrays. Digit. Signal Processing 2014, 24, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Sun, F.; Lan, P.; Ding, G.; Zhang, X.F. Two-dimensional direction-of-arrival estimation for co-prime planar arrays: A partial spectral search approach. IEEE Sens. J. 2016, 16, 5660–5670. [Google Scholar] [CrossRef]
- Li, J.; Shen, M.; Jiang, D. DOA estimation based on combined ESPRIT for co-prime array. In Proceedings of the IEEE 5th Asia-Pacific Conference on Antennas and Propagation (APCAP), Kaohsiung, Taiwan, 26–29 July 2016. [Google Scholar]
- Zheng, W.; Zhang, X.; Xu, L.; Zhou, J. Unfolded Coprime Planar Array for 2D Direction of Arrival Estimation: An Aperture-Augmented Perspective. IEEE Access 2018, 6, 22744–22753. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, W.; Chen, W.; Shi, Z. Two-dimensional DOA estimation for generalized coprime planar arrays: A fast-convergence trilinear decomposition approach. Multidimens. Syst. Signal Processing 2018, 30, 239–256. [Google Scholar] [CrossRef]
- Moriya, H.; Ichige, K.; Arai, H.; Hayashi, T.; Matsuno, H.; Nakano, M. High-resolution 2-D DOA estimation by 3-D array configuration based on CRLB formulation. In Proceedings of the IEEE International Conference on Signal Processing, Beijing, China, 21–25 October 2012. [Google Scholar]
- Moriya, H.; Ichige, K.; Arai, H.; Hayashi, T.; Matsuno, H.; Nakano, M. Novel 3-D array configuration based on CRLB formulation for high-resolution DOA estimation. In Proceedings of the International Symposium on Antennas & Propagation, Nagoya, Japan, 29 October–2 November 2012. [Google Scholar]
- Gong, P.; Ahmed, T. Three-Dimensional Coprime Array for Massive MIMO. Wirel. Commun. Mob. Comput. 2020, 1, 2686257. [Google Scholar]
- Stoica, P.; Arye, N. MUSIC, maximum likelihood, and Cramér-Rao bound. IEEE Trans. Acoust. Speech Signal Processing 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Gong, P.; Zhang, X.; Zhai, H. DOA Estimation for Generalized Three Dimensional Coprime Arrays: A Fast-Convergence Quadrilinear Decomposition Algorithm. IEEE Access 2018, 6, 62419–62431. [Google Scholar] [CrossRef]
- Gong, P.; Zhang, X. Generalized Three Dimensional Coprime Array for Two-Dimensional DOA Estimation. Wirel. Pers. Commun. 2020, 110, 1995–2017. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Complex Multiplication | Running time |
|---|---|---|
| Classic MUSIC | 3406.7221 | |
| TA-MUSIC | 7013.1121 | |
| E-MUSIC | 0.00697637 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, P.; Chen, X. Computationally Efficient Direction-of-Arrival Estimation Algorithms for a Cubic Coprime Array. Sensors 2022, 22, 136. https://doi.org/10.3390/s22010136
Gong P, Chen X. Computationally Efficient Direction-of-Arrival Estimation Algorithms for a Cubic Coprime Array. Sensors. 2022; 22(1):136. https://doi.org/10.3390/s22010136
Chicago/Turabian StyleGong, Pan, and Xixin Chen. 2022. "Computationally Efficient Direction-of-Arrival Estimation Algorithms for a Cubic Coprime Array" Sensors 22, no. 1: 136. https://doi.org/10.3390/s22010136
APA StyleGong, P., & Chen, X. (2022). Computationally Efficient Direction-of-Arrival Estimation Algorithms for a Cubic Coprime Array. Sensors, 22(1), 136. https://doi.org/10.3390/s22010136