
Fuzzy Inference and Sequence Model-Based Collision Risk Prediction System for Stand-On Vessel


Abstract
:1. Introduction
2. Theoretical Background
2.1. Determining Encounter Relations and Required Avoidance Actions
2.2. Collision Risk Inference Using FIS-NC
2.2.1. Input Parameters
2.2.2. CRI Inference Based on IF-THEN Rule
2.3. Sequence Model
2.3.1. LSTM
| Algorithm 1: Algorithm for execution of LSTM |
| Input: sequence data |
| weight |
| bias |
| output: |
| 1 |
| 2 |
| 3 for t = 1 to t |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| 9 |
| 10 end |
2.3.2. Bi-LSTM
2.3.3. GRU
3. Stand-On Vessel Collision Risk Prediction System Using FIS-NC and Sequence Model
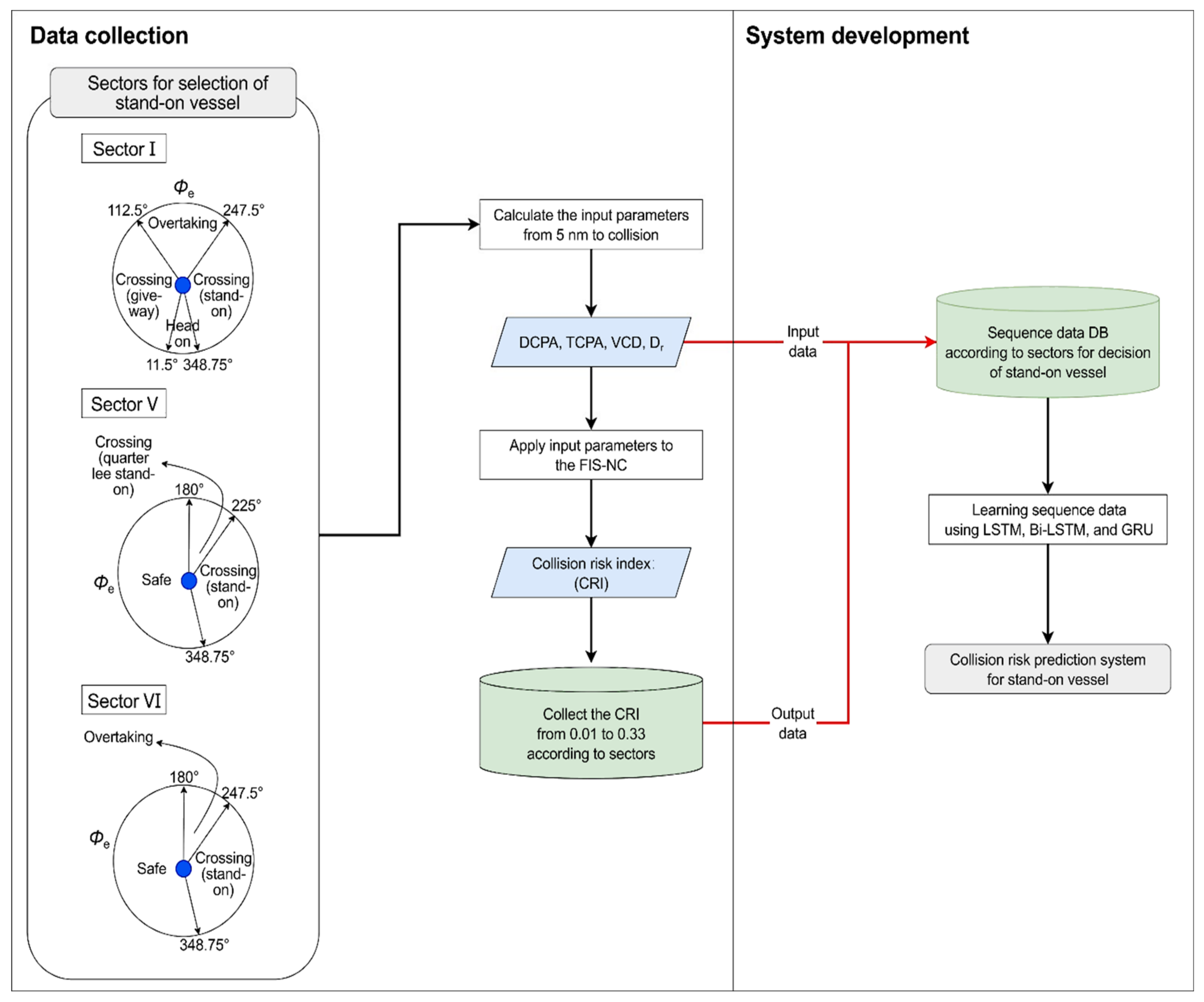
3.1. System Development Process
3.2. Data Collection
3.2.1. Simulation Scenario
3.2.2. Collected Data
3.3. System Development
3.4. System Application
| Algorithm 2: Algorithm for developed system application |
| Input: , , encounter relation , , , , |
| output: |
| 1 Initialize < 0.01 ← keep course and speed |
| 2 while >= 0.01 do |
| 3 if TS is in “sector I, V, and VI” decided with |
| 4 if ( > 247.5) and (348.75 > ) or ( > 180) and (348.75 > ) or ( > 247.5) and (348.75 > ) then |
| 5 decide ← crossing situation (stand-on, quarterlee stand-on) of OS |
| 6 predict CRI 0.33 ← the time point for collision avoidance of stand-on vessel |
| 7 else |
| 8 decide ← head-on situation or overtaking or Safe of OS |
| 9 end |
| 10 end |
| 11 end |
4. Case Study
4.1. Simulation Results
4.2. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Korean Maritime Safety Tribunal. Annual Report of Marine Accident. 2020. Available online: http://www.kmst.go.kr/kmst/statistics/annualReport/selecAnnReportList.do/ (accessed on 21 October 2021).
- International Maritime Organization. Convention on the International Regulations for Preventing Collisions at Sea (COLREGs); International Maritime Organization: London, UK, 1972.
- Namgung, H. Local route planning for collision avoidance of maritime autonomous surface ships in compliance with COLREGs rules. Sustainability 2022, 14, 198. [Google Scholar] [CrossRef]
- Kim, T.-G.; Hong, S.-H. Empirical analysis on the apportionment system of causation ratio in ship collision. J. Navig. Port Res. 2013, 37, 6. [Google Scholar]
- Shaobo, W.; Yingjun, Z.; Yisong, Z. Multi-ship encounter situation adaptive understanding by individual navigation intention inference. Ocean Eng. 2021, 237, 109612. [Google Scholar]
- Lei, D.; Floris, G.; Osiris, A.V.; Yamin, H.; Yuanqiao, W. Improving stand-on ship’s situational awareness by estimating the intention of the give-way ship. Ocean Eng. 2020, 201, 107110. [Google Scholar]
- Coldwell, T.G. Marine traffic behaviour in restricted waters. J. Navigat. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Smierzchalski, R. Ships’ domains as a collision risk at sea in the evolutionary trajectory planning. In Proceedings of the RISK Computer Simulation Risk Analysis and Hazard Mitigation, Southampton, UK, 11–13 October 2000; p. 45. [Google Scholar]
- Kijima, K.; Furukawa, Y. Automatic collision avoidance system using the concept of blocking area. In Proceedings of the IFAC Conference on Manoeuvring and Control of Marine Craft, Madrid, Spain, 17–19 September 2003; Volume 36, pp. 223–228. [Google Scholar]
- Pietrzykowski, Z.; Uriasz, J. The ship domain—A criterion of navigational safety assessment in an open sea area. J. Navigat. 2009, 62, 93–108. [Google Scholar] [CrossRef]
- Bakdi, A.; Glad, I.K.; Vanem, E.; Engelhardtsen, Ø. AIS-based multiple vessel collision and grounding risk identification based on adaptive safety domain. J. Mar. Sci. Eng. 2019, 8, 5. [Google Scholar] [CrossRef] [Green Version]
- Kearon, J. Computer program for collision avoidance and track keeping. In Proceedings of the Conference on Mathematical Aspects of Marine Traffic, London, UK, 15–16 September 1977; pp. 229–242. [Google Scholar]
- Smeaton, G.P.; Coenen, F.P. Developing an intelligent marine navigation system. Comput. Control Eng. J. 1990, 1, 95. [Google Scholar] [CrossRef]
- Lenart, A.S. Analysis of collision threat parameters and criteria. J. Navigat. 2015, 68, 887–896. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Li, W.; Shi, P. A real-time collision avoidance learning system for unmanned surface vessels. Neurocomputing 2016, 182, 255–266. [Google Scholar] [CrossRef]
- Im, N.; Luong, T.N. Potential risk ship domain as a danger criterion for real-time ship collision risk evaluation. Ocean Eng. 2019, 194, 106610. [Google Scholar] [CrossRef]
- Rafal, S.; Przemyslaw, K.; Joanna, S. A ship domain-based method of determining action distances for evasive manoeuvres in stand-on situation. J. Adv. Transp. 2018, 2018, 3984962. [Google Scholar]
- Bing, W.; Yixiong, H.; Weixuan, H.; Junmin, M.; Liling, L.; Ke, Z.; Liwen, H. A decision-making method for autonomous collision avoidance for the stand-on vessel based on motion process and COLREGs. J. Mar. Sci. Eng. 2021, 9, 584. [Google Scholar]
- Hasegawa, K.; Kouzuki, A.; Muramatsu, T.; Komine, H.; Watabe, Y. Ship auto-navigation fuzzy expert system (SAFES). J. Soc. Nav. Archit. Jpn. 1989, 1989, 445–452. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Rhee, K. Development of collision avoidance system by using expert system and search algorithm. Int. Shipbuild. Prog. 2001, 48, 197–212. [Google Scholar]
- Ahn, J.-H.; Rhee, K.-P.; You, Y.-J. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]
- Ohn, S.W.; Namgung, H. Interval type-2 fuzzy inference system based on closest point of approach for collision avoidance between ships. Appl. Sci. 2020, 10, 3919. [Google Scholar] [CrossRef]
- Namgung, H.; Kim, J.-S. Collision risk inference system for maritime autonomous surface ships using COLREGs rules compliant collision avoidance. IEEE Access 2021, 9, 7823–7835. [Google Scholar] [CrossRef]
- Montewka, J.; Hinz, T.; Kujala, P.; Matusiak, J. Probability modelling of vessel collisions. Reliab. Eng. Syst. Saf. 2020, 95, 573–589. [Google Scholar] [CrossRef]
- Montewka, J.; Goerlandt, F.; Kujala, P. A new definition of a collision zone for a geometrical model for ship-ship collision probability estimation. In Methods and Algorithms in Navigation; CRC Press: Boca Raton, FL, USA, 2011; pp. 93–100. [Google Scholar] [CrossRef]
- Montewka, J.; Goerlandt, F.; Lammi, H.; Kujala, P. A method for assessing a causation factor for a geometrical MDTC model for ship-ship collision probability estimation. In Methods and Algorithms in Navigation; CRC Press: Boca Raton, FL, USA, 2011; pp. 65–73. [Google Scholar] [CrossRef]
- Montewka, J.; Goerlandt, F.; Kujala, P. Determination of collision criteria and causation factors appropriate to a model for estimating the probability of maritime accidents. Ocean. Eng. 2012, 40, 50–61. [Google Scholar] [CrossRef]
- Mateusz, G.; Jakub, M.; Przemyslaw, K.; Tomasz, H.; Spyros, H. Determination of the dynamic critical maneuvering area in an encounter between two vessel: Operation with negligible environmental disruption. Ocean Eng. 2020, 213, 107709. [Google Scholar]
- Du, L.; Valdez, B.O.; Goerlandt, F.; Huang, Y.M.; Kujala, P. A COLREG-compliant vessel collision alert system for stand-on vessels. Ocean Eng. 2020, 218, 107866. [Google Scholar] [CrossRef]
- Cockcroft, A.N.; Lameijer, J.N.F. A Guide to the Collision Avoidance Rules: International Regulations for Preventing Collisions at Sea, 7th ed.; Butterworth-Heinemann: London, UK, 2012; pp. 85–86. [Google Scholar]
- Zhao, L.; Shi, G. Maritime anomaly detection using density-based clustering and recurrent neural network. J. Navig. 2019, 72, 894–916. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to forget: Continual prediction with LSTM. IEE Conf. Publ. 1999, 2, 850–855. [Google Scholar]
- Schuster, M.; Paliwal, K.K. Bidirectional recurrent neural networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef] [Green Version]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The performance of LSTM and BiLSTM in forecasting time series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3285–3292. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Kim, D.-B.; Yun, B.-W.; Jeong, J.-Y.; Park, J.-S.; Park, Y.-S. A fundamental study on the improvements of speed limit at the ports and fairways in Korea. J. Kor. Soc. Mar. Environ. Safety 2012, 18, 5. [Google Scholar]
- International Association of Marine Aids to Navigation and Lighthouse Authorities. IALA Guidelines 1082 an Overview of AIS; IALA: Saint-Germain-en-Laye, France, 2016. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Danger | Danger | Danger | Danger | |
| Threat | Threat | Threat | Threat | |
| Attention | Attention | Attention | Attention | |
| Collision | Threat | Danger | Collision | |
| Collision | Threat | Danger | Danger | |
| Danger | Danger | Threat | Threat |
| Sector I | Sector V | Sector VI | |||
|---|---|---|---|---|---|
| OS (Stand-On Vessel) | TS (Give-Way Vessel) | OS (Stand-On Vessel) | TS (Give-Way Vessel) | OS (Stand-On Vessel) | TS (Give-Way Vessel) |
| 000° | 168.75° | 000° | 168.75° | 000° | 168.75° |
| 000° | 157.5° | 000° | 157.5° | 000° | 157.5° |
| 000° | 146.25° | 000° | 146.25° | 000° | 146.25° |
| 000° | 135° | 000° | 135° | 000° | 135° |
| 000° | 123.75° | 000° | 123.75° | 000° | 123.75° |
| 000° | 112.5° | 000° | 112.5° | 000° | 112.5° |
| 000° | 101.25° | 000° | 101.25° | 000° | 101.25° |
| 000° | 090° | 000° | 090° | 000° | 090° |
| 000° | 078.75° | 000° | 078.75° | 000° | 078.75° |
| 000° | 067.5° | 000° | 067.5° | 000° | 067.5° |
| - | - | - | 056.25° | - | - |
| - | - | - | 045° | - | - |
| - | - | - | 033.75° | - | - |
| - | - | - | 022.5° | - | - |
| - | - | - | 011.25° | - | - |
| Sector I | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| CRI | CRI | ||||||||
| 0.086661 | 6.996518 | 0 | 3.11 | 0.01089 | 0.069942 | 5.646707 | 0 | 2.51 | 0.126185 |
| 0.085825 | 6.929028 | 0 | 3.08 | 0.01107 | 0.069106 | 5.579217 | 0 | 2.48 | 0.137516 |
| 0.084989 | 6.861537 | 0 | 3.05 | 0.01113 | 0.06827 | 5.511726 | 0 | 2.45 | 0.148778 |
| 0.084153 | 6.794046 | 0 | 3.02 | 0.01118 | 0.067434 | 5.444236 | 0 | 2.42 | 0.159971 |
| 0.083317 | 6.726556 | 0 | 2.99 | 0.01125 | 0.066598 | 5.376745 | 0 | 2.39 | 0.171095 |
| 0.082481 | 6.659065 | 0 | 2.96 | 0.01157 | 0.065762 | 5.309255 | 0 | 2.36 | 0.182153 |
| 0.081645 | 6.591575 | 0 | 2.93 | 0.01189 | 0.064926 | 5.241764 | 0 | 2.33 | 0.193143 |
| 0.080809 | 6.524084 | 0 | 2.9 | 0.01208 | 0.06409 | 5.174274 | 0 | 2.3 | 0.204067 |
| 0.079973 | 6.456594 | 0 | 2.87 | 0.01265 | 0.063254 | 5.106783 | 0 | 2.27 | 0.214926 |
| 0.079137 | 6.389103 | 0 | 2.84 | 0.01297 | 0.062418 | 5.039293 | 0 | 2.24 | 0.22572 |
| 0.078301 | 6.321613 | 0 | 2.81 | 0.01302 | 0.061582 | 4.971802 | 0 | 2.21 | 0.236449 |
| 0.077465 | 6.254122 | 0 | 2.78 | 0.020979 | 0.060746 | 4.904312 | 0 | 2.18 | 0.247114 |
| 0.076629 | 6.186632 | 0 | 2.75 | 0.032964 | 0.05991 | 4.836821 | 0 | 2.15 | 0.257716 |
| 0.075794 | 6.119141 | 0 | 2.72 | 0.044873 | 0.059074 | 4.769331 | 0 | 2.12 | 0.268255 |
| 0.074958 | 6.051651 | 0 | 2.69 | 0.056708 | 0.058238 | 4.70184 | 0 | 2.09 | 0.278732 |
| 0.074122 | 5.98416 | 0 | 2.66 | 0.068468 | 0.057402 | 4.63435 | 0 | 2.06 | 0.289148 |
| 0.073286 | 5.91667 | 0 | 2.63 | 0.080156 | 0.056566 | 4.566859 | 0 | 2.03 | 0.299502 |
| 0.07245 | 5.849179 | 0 | 2.6 | 0.09177 | 0.055731 | 4.499369 | 0 | 2 | 0.309796 |
| 0.071614 | 5.781689 | 0 | 2.57 | 0.103313 | 0.054895 | 4.431878 | 0 | 1.97 | 0.32003 |
| 0.070778 | 5.714198 | 0 | 2.54 | 0.114785 | 0.054059 | 4.364387 | 0 | 1.94 | 0.330205 |
| Trajectory Number | (nm) | (kn) | HYUNDAI CONFIDENCE (Give-Way Vessel) | PACIFIC CARRIER (Stand-On Vessel) | ||
|---|---|---|---|---|---|---|
| Heading (degree) | Speed (kn) | Heading (degree) | Speed (kn) | |||
| 1 | 6.4 | 27.0 | 174 | 19.8 | 028 | 8.2 |
| 6.2 | 27.0 | 174 | 19.8 | 028 | 8.2 | |
| 6.0 | 27.0 | 174 | 19.8 | 028 | 8.2 | |
| 5.9 | 27.0 | 174 | 19.8 | 028 | 8.2 | |
| 5.7 | 27.0 | 174 | 19.8 | 028 | 8.2 | |
| 2 | 5.5 | 21.2 | 120 | 18.8 | 025 | 8.4 |
| 5.3 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 5.1 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 4.9 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 4.8 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 4.6 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 4.4 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 4.2 | 21.2 | 120 | 18.8 | 025 | 8.4 | |
| 3 | 4.1 | 18.5 | 104 | 18.8 | 029 | 8.5 |
| 4.0 | 18.5 | 104 | 18.8 | 029 | 8.5 | |
| 3.8 | 18.5 | 104 | 18.8 | 029 | 8.5 | |
| 3.7 | 18.5 | 104 | 18.8 | 029 | 8.5 | |
| 3.5 | 18.5 | 104 | 18.8 | 029 | 8.5 | |
| 4 | 3.3 | 18.9 | 102 | 19.4 | 028 | 8.7 |
| 3.2 | 18.9 | 102 | 19.4 | 028 | 8.7 | |
| 3.0 | 18.9 | 102 | 19.4 | 028 | 8.7 | |
| 2.9 | 18.9 | 102 | 19.4 | 028 | 8.7 | |
| 2.7 | 18.9 | 102 | 19.4 | 028 | 8.7 | |
| 2.6 | 18.9 | 102 | 19.4 | 028 | 8.7 | |
| 2.4 | 19.0 | 102 | 19.4 | 028 | 8.8 | |
| 2.3 | 19.0 | 102 | 19.4 | 028 | 8.8 | |
| 2.1 | 19.0 | 102 | 19.4 | 028 | 8.8 | |
| 2.0 | 19.0 | 102 | 19.4 | 028 | 8.8 | |
| 1.8 | 19.0 | 102 | 19.4 | 028 | 8.8 | |
| 5 | 1.7 | 19.4 | 105 | 19.5 | 029 | 8.8 |
| 1.5 | 19.4 | 105 | 19.5 | 029 | 8.8 | |
| 1.4 | 19.4 | 105 | 19.5 | 029 | 8.8 | |
| 1.3 | 19.4 | 105 | 19.5 | 029 | 8.8 | |
| 6 | 1.1 | 21.4 | 119 | 19.4 | 028 | 8.7 |
| 0.9 | 21.4 | 119 | 19.4 | 028 | 8.7 | |
| 0.8 | 21.4 | 119 | 19.4 | 028 | 8.7 | |
| 7 | 0.5 | 23.9 | 176 | 15.9 | 022 | 8.6 |
| 0.3 | 23.9 | 176 | 15.9 | 022 | 8.6 | |
| 0.2 | 23.9 | 176 | 15.9 | 022 | 8.6 | |
| Trajectory Number | FIS-NC | Developed System | ||||
|---|---|---|---|---|---|---|
| 3 | 0.644 | 12.139 | 0.898 | 3.803 | 0.011 | 0.015 |
| 0.644 | 11.639 | 0.917 | 3.651 | 0.012 | 0.016 | |
| 0.644 | 11.139 | 0.937 | 3.499 | 0.015 | 0.028 | |
| 4 | 0.741 | 10.296 | 1.182 | 3.336 | 0.021 | 0.031 |
| 0.741 | 9.796 | 0.958 | 3.182 | 0.028 | 0.057 | |
| 0.741 | 9.296 | 0.977 | 3.028 | 0.037 | 0.084 | |
| 0.741 | 8.796 | 0.996 | 2.876 | 0.049 | 0.119 | |
| 0.741 | 8.296 | 1.015 | 2.723 | 0.058 | 0.165 | |
| 0.741 | 7.796 | 1.033 | 2.572 | 0.117 | 0.221 | |
| 0.728 | 7.291 | 1.083 | 2.417 | 0.174 | 0.283 | |
| 0.728 | 6.791 | 1.078 | 2.267 | 0.231 | 0.338 | |
| 0.728 | 6.291 | 1.096 | 2.118 | 0.284 | 0.387 | |
| 0.728 | 5.791 | 1.114 | 1.970 | 0.335 | 0.429 |
| Division | Guide to Collision Avoidance Rules | FIS-NC | Developed System |
|---|---|---|---|
| (nm) | 2 to 3 | 1.970 | 2.267 |
| (min) | 6 | 5.791 | 6.791 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Namgung, H.; Ohn, S.-W. Fuzzy Inference and Sequence Model-Based Collision Risk Prediction System for Stand-On Vessel. Sensors 2022, 22, 4983. https://doi.org/10.3390/s22134983
Namgung H, Ohn S-W. Fuzzy Inference and Sequence Model-Based Collision Risk Prediction System for Stand-On Vessel. Sensors. 2022; 22(13):4983. https://doi.org/10.3390/s22134983
Chicago/Turabian StyleNamgung, Ho, and Sung-Wook Ohn. 2022. "Fuzzy Inference and Sequence Model-Based Collision Risk Prediction System for Stand-On Vessel" Sensors 22, no. 13: 4983. https://doi.org/10.3390/s22134983