
GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation

Abstract
:1. Introduction
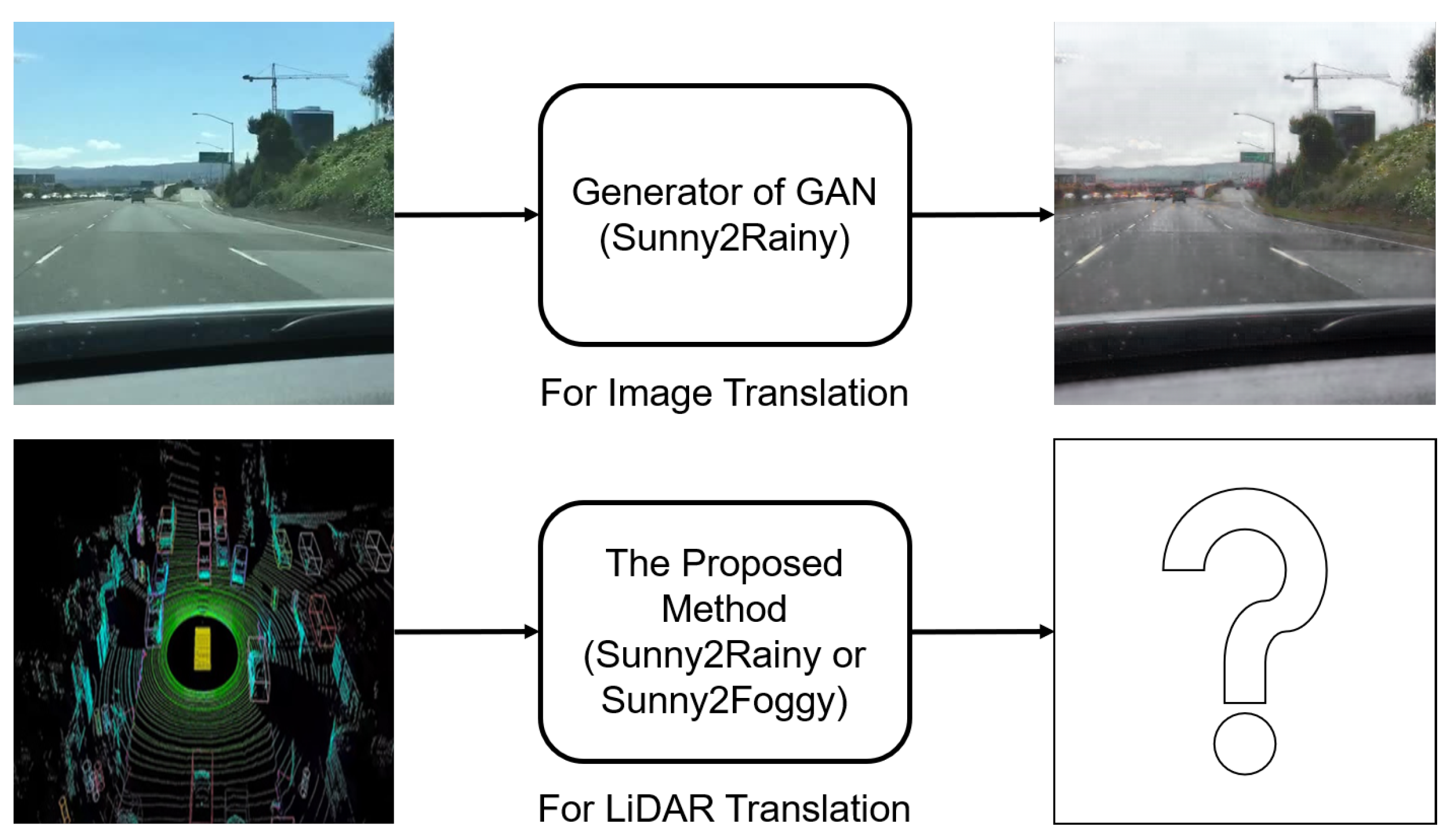
- We present the first LiDAR-to-LiDAR translation method based on an empirical method that deals with various adverse weather conditions.
- For the proposed method, we suggest the optimal format for LiDAR translation through several trial-and-error experiments and comparing the results on a case-by-case basis.
- The proposed method deals with translations between sunny and adverse weather, such as rain and fog, with high performance.
- The proposed method is the first LiDAR-to-LiDAR translation which was evaluated parametrically using the JARI data set, which was collected under varying adverse weather conditions, such as precipitation and visible distance.
2. Related Work
2.1. LiDAR Translation to Handle Various Weather Conditions
2.2. LiDAR Translation for Data Augmentation
2.3. Generative Adversarial Networks
3. Proposed Method
3.1. Setup
3.2. Architecture
3.3. Training
4. Experimental Results
4.1. Data Sets
4.2. Experiment 1: The Most Optimal Input Format and Architecture
4.3. Experiment 2: Advantages of Skip-Connections
4.4. Experiment 3: LiDAR Translation to Handle Adverse Weathers
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Ma, H.; Wan, J.; Li, B.; Xia, T. Multi-view 3d object detection network for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1907–1915. [Google Scholar]
- Chen, X.; Kundu, K.; Zhang, Z.; Ma, H.; Fidler, S.; Urtasun, R. Monocular 3d object detection for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2147–2156. [Google Scholar]
- Feng, D.; Haase-Schütz, C.; Rosenbaum, L.; Hertlein, H.; Glaeser, C.; Timm, F.; Wiesbeck, W.; Dietmayer, K. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods, and challenges. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1341–1360. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Fidler, S.; Urtasun, R. Instance-level segmentation for autonomous driving with deep densely connected mrfs. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 669–677. [Google Scholar]
- De Brabandere, B.; Neven, D.; Van Gool, L. Semantic instance segmentation for autonomous driving. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 7–9. [Google Scholar]
- Fu, H.; Gong, M.; Wang, C.; Batmanghelich, K.; Tao, D. Deep ordinal regression network for monocular depth estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2002–2011. [Google Scholar]
- Godard, C.; Mac Aodha, O.; Firman, M.; Brostow, G.J. Digging into self-supervised monocular depth estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 3828–3838. [Google Scholar]
- Wofk, D.; Ma, F.; Yang, T.J.; Karaman, S.; Sze, V. Fastdepth: Fast monocular depth estimation on embedded systems. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6101–6108. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; Volume 27. [Google Scholar]
- El Sallab, A.; Sobh, I.; Zahran, M.; Essam, N. LiDAR sensor modeling and data augmentation with GANs for autonomous driving. arXiv 2019, arXiv:1905.07290. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; Volume 78, pp. 1–16. [Google Scholar]
- Arioui, H.; Hima, S.; Nehaoua, L.; Bertin, R.J.; Espié, S. From design to experiments of a 2-DOF vehicle driving simulator. IEEE Trans. Veh. Technol. 2010, 60, 357–368. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.-S.; Kim, J.-H.; Cho, J.-H. A driving simulator as a virtual reality tool. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20 May 1998; pp. 71–76. [Google Scholar]
- Kim, I.I.; McArthur, B.; Korevaar, E.J. Comparison of laser beam propagation at 785 nm and 1550 nm in fog and haze for optical wireless communications. In Proceedings of the Optical Wireless Communications III. International Society for Optics and Photonics, Boston, MA, USA, 5–8 November 2001; pp. 26–37. [Google Scholar]
- Rasshofer, R.H.; Spies, M.; Spies, H. Influences of weather phenomena on automotive laser radar systems. Adv. Radio Sci. 2011, 9, 49–60. [Google Scholar] [CrossRef] [Green Version]
- Wojtanowski, J.; Zygmunt, M.; Kaszczuk, M.; Mierczyk, Z.; Muzal, M. Comparison of 905 nm and 1550 nm semiconductor laser rangefinders’ performance deterioration due to adverse environmental conditions. Opto-Electron. Rev. 2014, 22, 183–190. [Google Scholar] [CrossRef]
- Filgueira, A.; González-Jorge, H.; Lagüela, S.; Díaz-Vilariño, L.; Arias, P. Quantifying the influence of rain in LiDAR performance. Measurement 2017, 95, 143–148. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Holzhüter, H.; Colomb, M.; Duthon, P. Automotive LiDAR performance verification in fog and rain. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1695–1701. [Google Scholar]
- Jokela, M.; Kutila, M.; Pyykönen, P. Testing and validation of automotive point-cloud sensors in adverse weather conditions. Appl. Sci. 2019, 9, 2341. [Google Scholar] [CrossRef] [Green Version]
- Heinzler, R.; Schindler, P.; Seekircher, J.; Ritter, W.; Stork, W. Weather influence and classification with automotive lidar sensors. In Proceedings of the 2019 IEEE intelligent vehicles symposium (IV), Paris, France, 9–12 June 2019; pp. 1527–1534. [Google Scholar]
- Wallace, A.M.; Halimi, A.; Buller, G.S. Full waveform LiDAR for adverse weather conditions. IEEE Trans. Veh. Technol. 2020, 69, 7064–7077. [Google Scholar] [CrossRef]
- Li, Y.; Duthon, P.; Colomb, M.; Ibanez-Guzman, J. What happens for a ToF LiDAR in fog? IEEE Trans. Intell. Transp. Syst. 2020, 22, 6670–6681. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Ritter, W.; Sawade, O.; Schäufele, B. Automotive lidar sensor development scenarios for harsh weather conditions. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]
- Sakaridis, C.; Dai, D.; Van Gool, L. Semantic foggy scene understanding with synthetic data. Int. J. Comput. Vis. 2018, 126, 973–992. [Google Scholar] [CrossRef] [Green Version]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The cityscapes dataset for semantic urban scene understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 3213–3223. [Google Scholar]
- Hahner, M.; Dai, D.; Sakaridis, C.; Zaech, J.N.; Van Gool, L. Semantic understanding of foggy scenes with purely synthetic data. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3675–3681. [Google Scholar]
- Wrenninge, M.; Unger, J. Synscapes: A photorealistic synthetic dataset for street scene parsing. arXiv 2018, arXiv:1810.08705. [Google Scholar]
- Sakaridis, C.; Dai, D.; Van Gool, L. ACDC: The adverse conditions dataset with correspondences for semantic driving scene understanding. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 10765–10775. [Google Scholar]
- Bijelic, M.; Gruber, T.; Mannan, F.; Kraus, F.; Ritter, W.; Dietmayer, K.; Heide, F. Seeing through fog without seeing fog: Deep multimodal sensor fusion in unseen adverse weather. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 951–963. [Google Scholar]
- Hahner, M.; Sakaridis, C.; Dai, D.; Van Gool, L. Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 15283–15292. [Google Scholar]
- Yang, T.; Li, Y.; Ruichek, Y.; Yan, Z. Performance Modeling a Near-Infrared ToF LiDAR Under Fog: A Data-Driven Approach. IEEE Trans. Intell. Transp. Syst. 2021, 1–10. [Google Scholar] [CrossRef]
- Vargas Rivero, J.R.; Gerbich, T.; Buschardt, B.; Chen, J. Data Augmentation of Automotive LIDAR Point Clouds under Adverse Weather Situations. Sensors 2021, 21, 4503. [Google Scholar] [CrossRef] [PubMed]
- Milz, S.; Rudiger, T.; Suss, S. Aerial ganeration: Towards realistic data augmentation using conditional gans. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The kitti dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Goldluecke, B.; Anklam, C. L2R GAN: LiDAR-to-radar translation. In Proceedings of the Asian Conference on Computer Vision, Kyoto, Japan, 30 November–4 December 2020. [Google Scholar]
- Li, R.; Li, X.; Fu, C.W.; Cohen-Or, D.; Heng, P.A. Pu-gan: A point cloud upsampling adversarial network. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27–28 October 2019; pp. 7203–7212. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein generative adversarial networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 214–223. [Google Scholar]
- Mao, X.; Li, Q.; Xie, H.; Lau, R.Y.; Wang, Z.; Paul Smolley, S. Least squares generative adversarial networks. In Proceedings of the IEEE International Conference on computer Vision, Venice, Italy, 22–29 October 2017; pp. 2794–2802. [Google Scholar]
- Chen, X.; Duan, Y.; Houthooft, R.; Schulman, J.; Sutskever, I.; Abbeel, P. Infogan: Interpretable representation learning by information maximizing generative adversarial nets. In Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 2180–2188. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Radford, A.; Metz, L.; Chintala, S. Unsupervised representation learning with deep convolutional generative adversarial networks. arXiv 2015, arXiv:1511.06434. [Google Scholar]
- Zhang, H.; Goodfellow, I.; Metaxas, D.; Odena, A. Self-attention generative adversarial networks. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 10–15 June 2019; pp. 7354–7363. [Google Scholar]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Kim, T.; Cha, M.; Kim, H.; Lee, J.K.; Kim, J. Learning to discover cross-domain relations with generative adversarial networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 1857–1865. [Google Scholar]
- Yi, Z.; Zhang, H.; Tan, P.; Gong, M. Dualgan: Unsupervised dual learning for image-to-image translation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2849–2857. [Google Scholar]
- Liu, M.Y.; Breuel, T.; Kautz, J. Unsupervised image-to-image translation networks. In Proceedings of the 30th International Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Liu, M.Y.; Tuzel, O. Coupled generative adversarial networks. In Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; Volume 29. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 630–645. [Google Scholar]
- Tong, T.; Li, G.; Liu, X.; Gao, Q. Image super-resolution using dense skip connections. In Proceedings of the IEEE International Conference on computer Vision, Venice, Italy, 22–29 October 2017; pp. 4799–4807. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Day/Night | 5 km/h | 40 km/h |
|---|---|---|---|
| Sunny (dry) | Day | O | O |
| Night | O | O | |
| Sunny (wet) | Day | O | O |
| Night | O | O | |
| Rain (30 mm/h) | Day | O | O |
| Night | O | O | |
| Rain (50 mm/h) | Day | O | O |
| Night | O | O | |
| Rain (80 mm/h) | Day | O | O |
| Night | O | O | |
| Fog (15 m) | Day | O | O |
| Night | O | O | |
| Fog (30 m) | Day | O | O |
| Night | O | O | |
| Fog (80 m) | Day | O | O |
| Night | O | O |
| From Source to Target | Original | Intensity/15 | Intensity Square-Root | (Intensity) |
|---|---|---|---|---|
| from Sunny(dry)–Day to Fog(15 m)–Day | 3.29772 | 1.89300 | 2.00392 | 2.29613 |
| from Fog(15 m)–Day to Sunny(dry)–Day | 11.29231 | 5.31886 | 6.69213 | 7.00921 |
| From Source to Target | Original | Intensity/15 | Intensity Square-Root | (Intensity) |
|---|---|---|---|---|
| from Sunny(dry)–Day to Fog(15 m)–Day | 41.22198 | 18.17874 | 22.55924 | 21.61834 |
| from Fog(15 m)–Day to Sunny(dry)–Day | 360.95213 | 178.30045 | 189.13991 | 190.81837 |
| G_Num & D_Num | -Distance Error [m]- from (Fog(80 m)–Day to Sunny(dry)–Day) | -Distance Error [m]- from (Sunny(dry)–Day to Fog(80 m)–Day) | -Intensity Error- from (Fog(80 m)–Day to Sunny(dry)–Day) | -Intensity Error- from (Sunny(dry)–Day to Fog(80 m)–Day) |
|---|---|---|---|---|
| 1_1 | 4.67128 | 2.62430 | 141.66245 | 97.37588 |
| 2_1 | 3.99260 | 2.50344 | 133.39045 | 90.80555 |
| 3_1 | 4.08508 | 2.45496 | 126.61005 | 87.46522 |
| 4_1 | 3.71519 | 2.40176 | 118.97728 | 87.32463 |
| 4_2 | 7.30083 | 2.59537 | 138.42924 | 88.39707 |
| 5_1 | 4.35619 | 2.41132 | 139.32719 | 88.23212 |
| 6_1 | 4.60828 | 2.43462 | 165.04027 | 89.37218 |
| -Distance Error [m]- from (Fog(80 m)–Day to Sunny(dry)–Day) | -Distance Error [m]- from (Sunny(dry)–Day to Fog(80 m)–Day) | -Intensity Error- from (Fog(80 m)–Day to Sunny(dry)–Day) | -Intensity Error- from (Sunny(dry)–Day to Fog(80 m)–Day) | |
|---|---|---|---|---|
| w/o skip connections | 3.71519 | 2.40176 | 118.97728 | 87.32463 |
| w skip connections | 3.62987 | 2.40018 | 109.62120 | 87.00812 |
| From Source to Target | Distance Error [m] | Intensity Error |
|---|---|---|
| from Sunny(dry)–Day to Sunny(dry)–Night | 1.49497 | 85.98490 |
| from Sunny(dry)–Night to Sunny(dry)–Day | 1.43653 | 94.33114 |
| from Sunny(dry)–Day to Sunny(wet)–Day | 1.75741 | 85.57328 |
| from Sunny(wet)–Day to Sunny(dry)–Day | 1.81523 | 92.17662 |
| from Sunny(dry)–Day to Sunny(wet)–Night | 1.76100 | 87.66818 |
| from Sunny(wet)–Night to Sunny(dry)–Day | 1.84540 | 94.66367 |
| from Sunny(dry)–Day to Rain(30 mm/h)–Day | 2.78518 | 68.59065 |
| from Rain(30 mm/h)–Day to Sunny(dry)–Day | 3.08751 | 99.64109 |
| from Sunny(dry)–Day to Rain(30 mm/h)–Night | 2.74591 | 65.87693 |
| from Rain(30 mm/h)–Night to Sunny(dry)–Day | 3.36074 | 109.62120 |
| from Sunny(dry)–Day to Rain(50 mm/h)–Day | 2.77008 | 70.83799 |
| from Rain(50 mm/h)–Day to Sunny(dry)–Day | 3.47687 | 112.60500 |
| from Sunny(dry)–Day to Rain(50 mm/h)–Night | 2.89603 | 69.15411 |
| from Rain(50 mm/h)–Night to Sunny(dry)–Day | 3.28403 | 103.78098 |
| from Sunny(dry)–Day to Rain(80 mm/h)–Day | 2.69017 | 59.15411 |
| from Rain(80 mm/h)–Day to Sunny(dry)–Day | 3.60374 | 98.61141 |
| from Sunny(dry)–Day to Rain(80 mm/h)–Night | 2.60951 | 62.18444 |
| from Rain(80 mm/h)–Night to Sunny(dry)–Day | 3.15333 | 96.81059 |
| from Sunny(dry)–Day to Fog(15 m)–Day | 1.73134 | 17.84077 |
| from Fog(15 m)–Day to Sunny(dry)–Day | 4.19671 | 111.54227 |
| from Sunny(dry)–Day to Fog(15 m)–Night | 1.69258 | 16.66186 |
| from Fog(15 m)–Night to Sunny(dry)–Day | 4.19542 | 115.00208 |
| from Sunny(dry)–Day to Fog(30 m)–Day | 1.88871 | 56.95320 |
| from Fog(30 m)–Day to Sunny(dry)–Day | 3.62490 | 109.74681 |
| from Sunny(dry)–Day to Fog(30 m)–Night | 1.90341 | 55.06957 |
| from Fog(30 m)–Night to Sunny(dry)–Day | 3.39191 | 97.75404 |
| from Sunny(dry)–Day to Fog(80 m)–Day | 2.20018 | 67.00812 |
| from Fog(80 m)–Day to Sunny(dry)–Day | 2.62987 | 89.62120 |
| from Sunny(dry)–Day to Fog(80 m)–Night | 2.35044 | 63.26001 |
| from Fog(80 m)–Night to Sunny(dry)–Day | 2.57701 | 85.65783 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Shiotsuka, D.; Nishimori, T.; Nakao, K.; Kamijo, S. GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation. Sensors 2022, 22, 5287. https://doi.org/10.3390/s22145287
Lee J, Shiotsuka D, Nishimori T, Nakao K, Kamijo S. GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation. Sensors. 2022; 22(14):5287. https://doi.org/10.3390/s22145287
Chicago/Turabian StyleLee, Jinho, Daiki Shiotsuka, Toshiaki Nishimori, Kenta Nakao, and Shunsuke Kamijo. 2022. "GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation" Sensors 22, no. 14: 5287. https://doi.org/10.3390/s22145287
APA StyleLee, J., Shiotsuka, D., Nishimori, T., Nakao, K., & Kamijo, S. (2022). GAN-Based LiDAR Translation between Sunny and Adverse Weather for Autonomous Driving and Driving Simulation. Sensors, 22(14), 5287. https://doi.org/10.3390/s22145287