
The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A novel algorithm based on the CS is proposed to analyze the CSI and extract the CIR.
- A dictionary denoising method based on the direct weight determination of a neural network is derived for denoising CIR signals in compressed sensing. The sparsity of a dictionary is used as the sparse matrix of compressed sensing to estimate the TOA, which improves the accuracy of estimation.
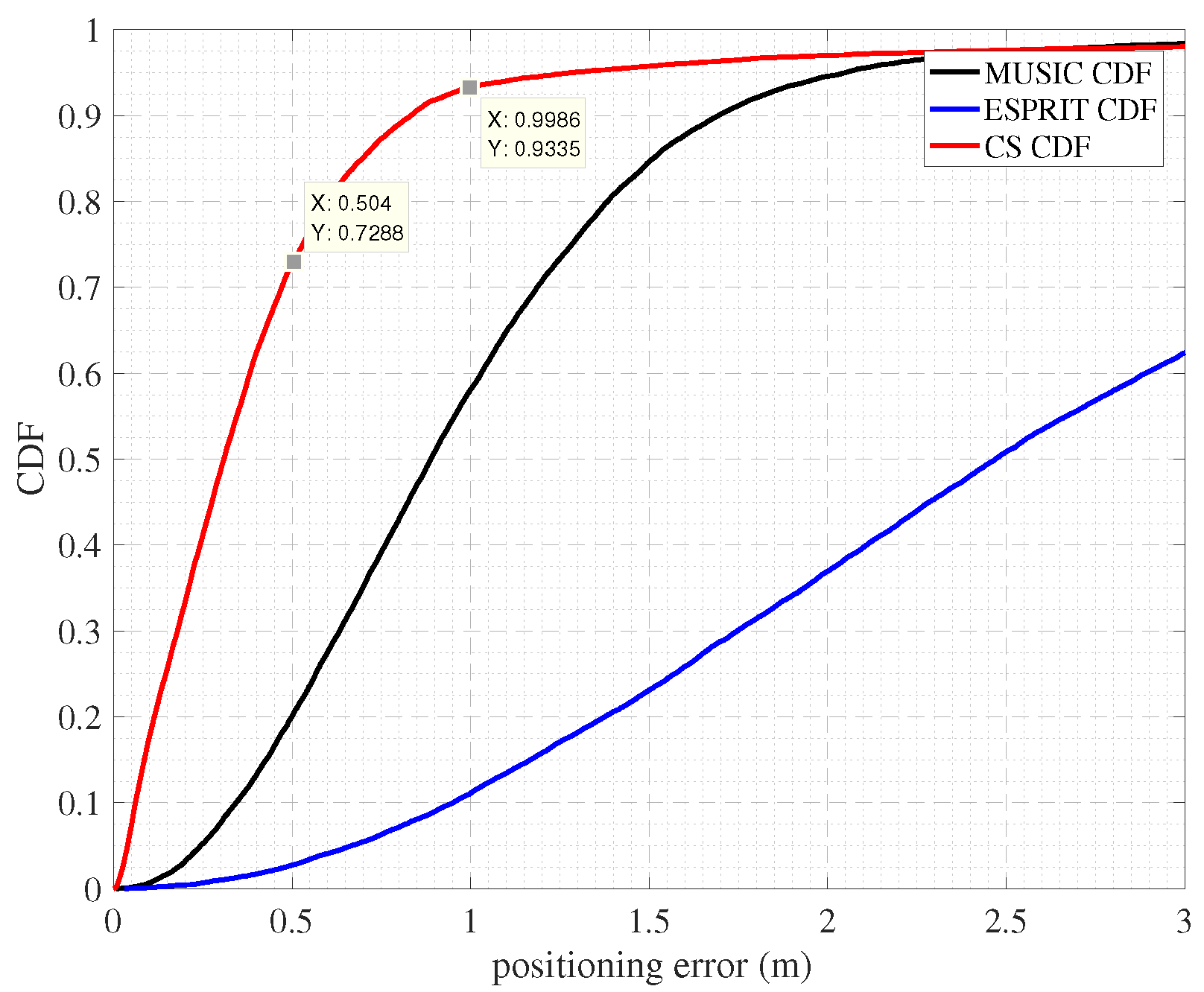
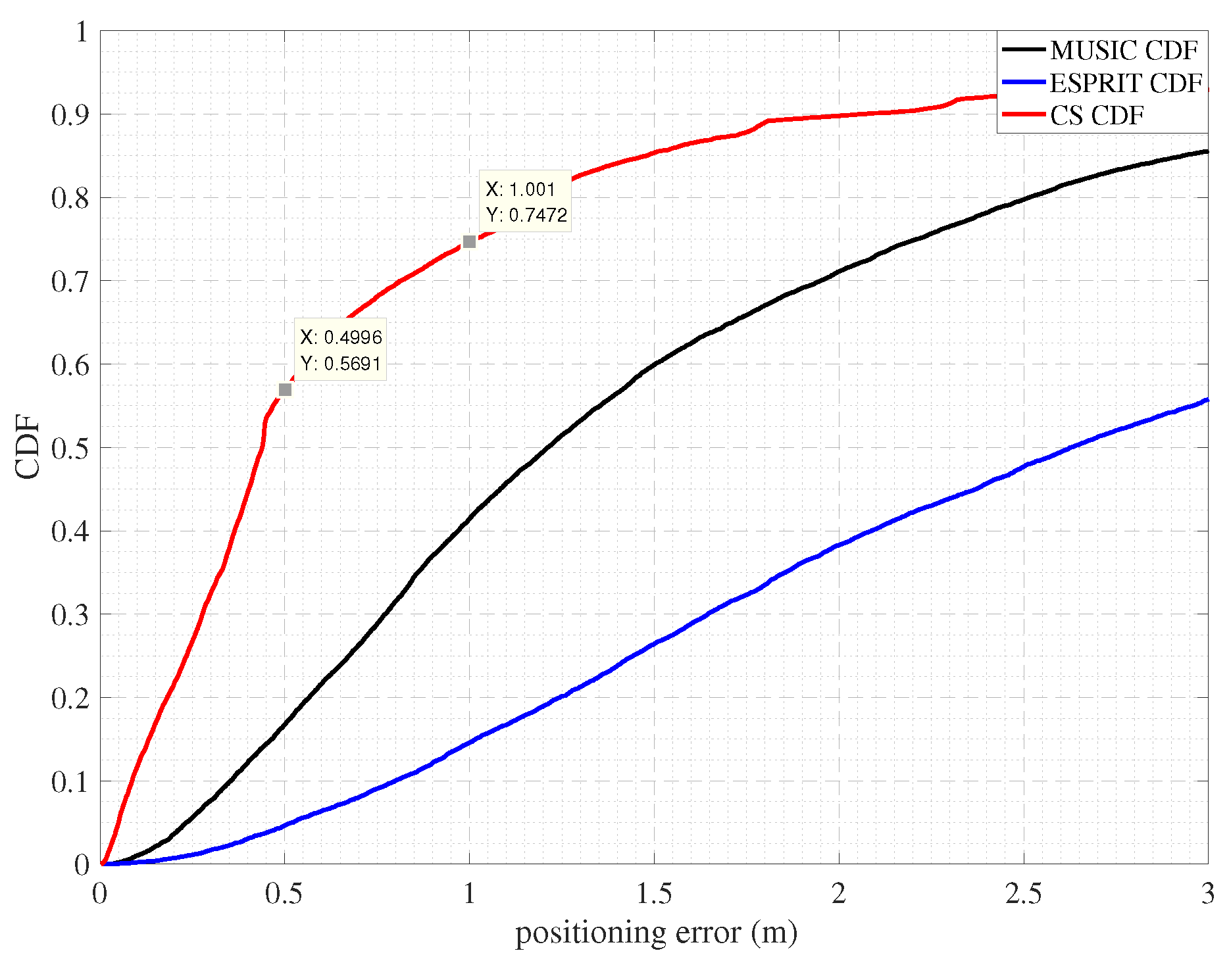
- The proposed method is validated experimentally and shown to outperform conventional approaches based on MUSIC or estimating signal parameters via rotational invariance techniques (ESPRIT).
2. System Model
2.1. System Architecture
2.2. Signal Structure
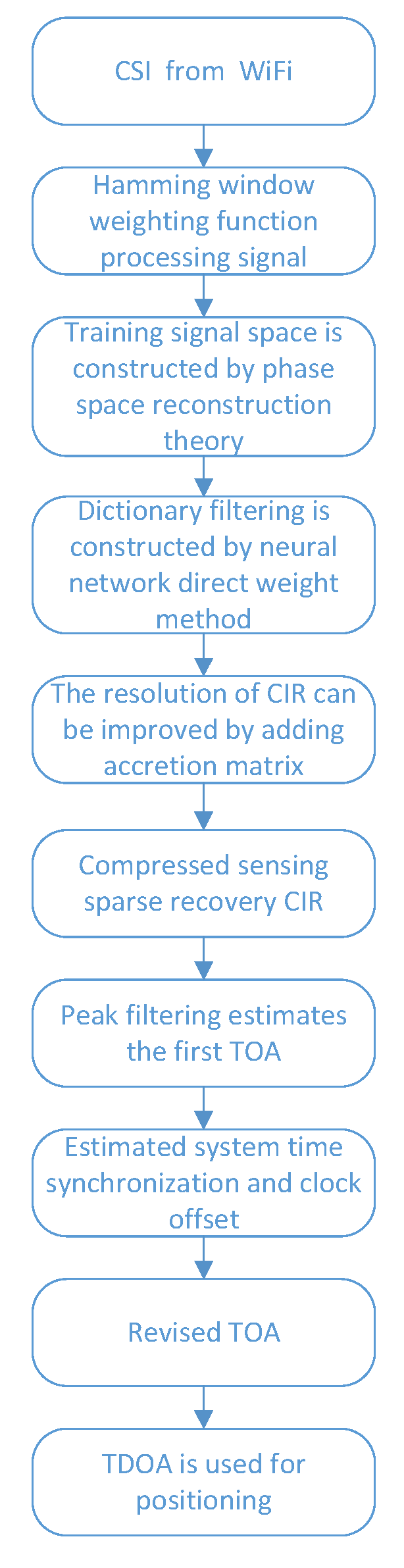
3. Proposed Approach
3.1. Frequency Domain Windowing
3.2. Dictionary Atomic Filtering
3.2.1. The Phase Space Reconstructs the Input Signal
3.2.2. Dictionary Learning Algorithms
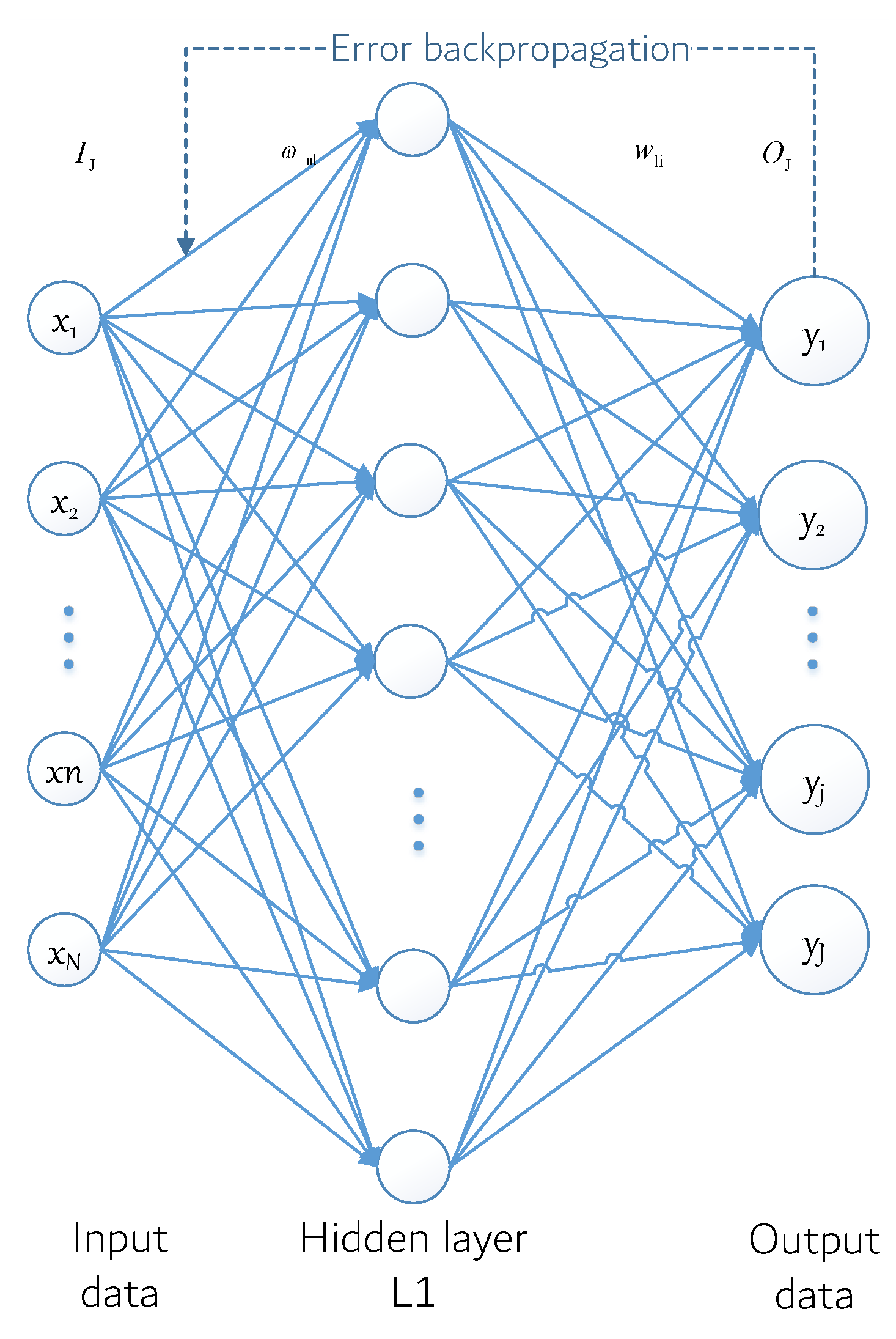
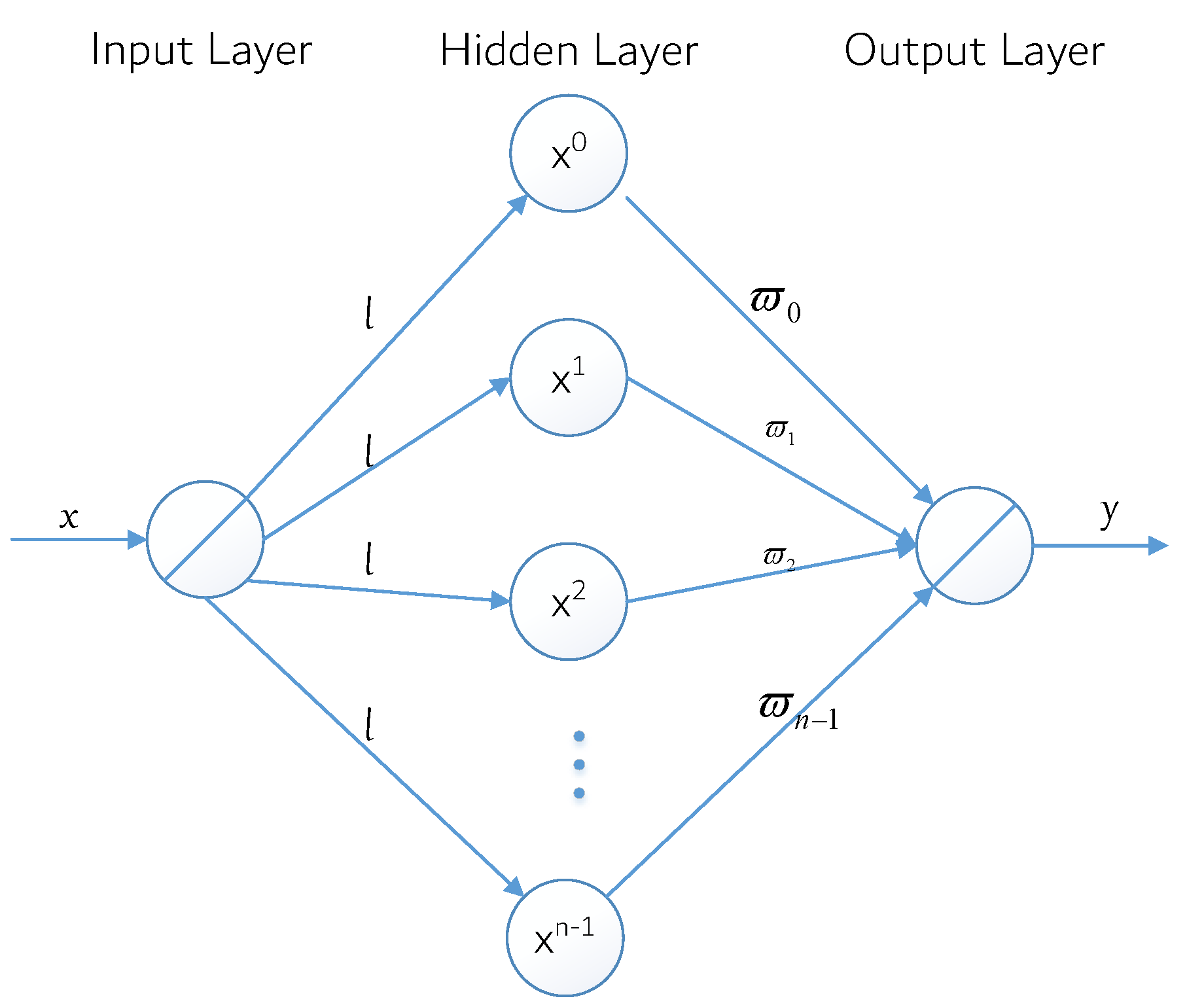
3.2.3. Direct Weight Determination of Neural Networks
3.2.4. Dictionary Atomic Denoising Verification
3.3. Sparse Blind the TOA Offset Estimation
3.3.1. Construction of Sparse Basis Matrix
3.3.2. Construction of Measurement Matrix
3.3.3. CIR Resolution Augmentation Matrix
3.3.4. Sparse Recovery
3.3.5. CS with Complex-Valued Targets
3.3.6. Sparse and Coherence Proof
4. Experimental Results
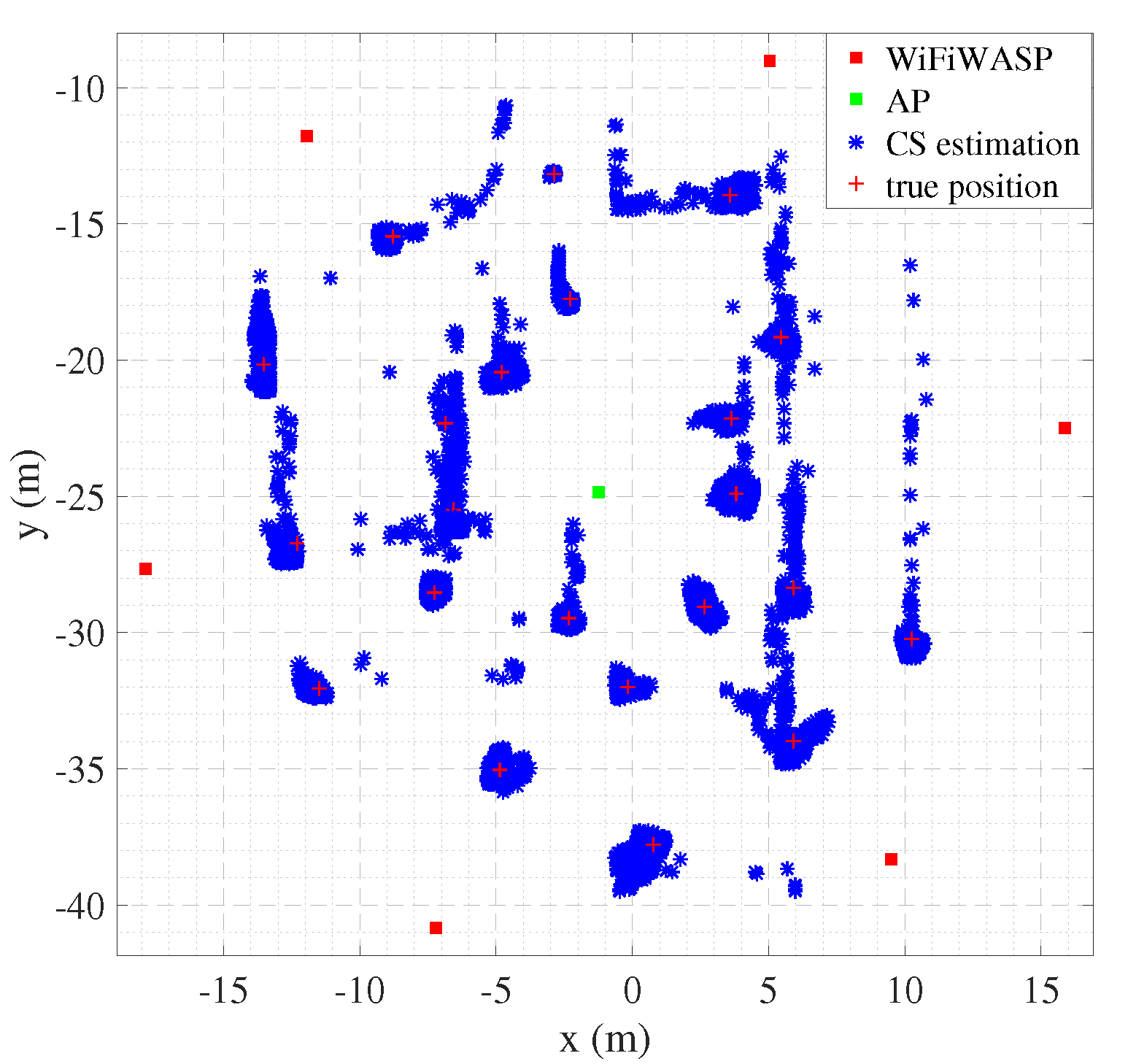
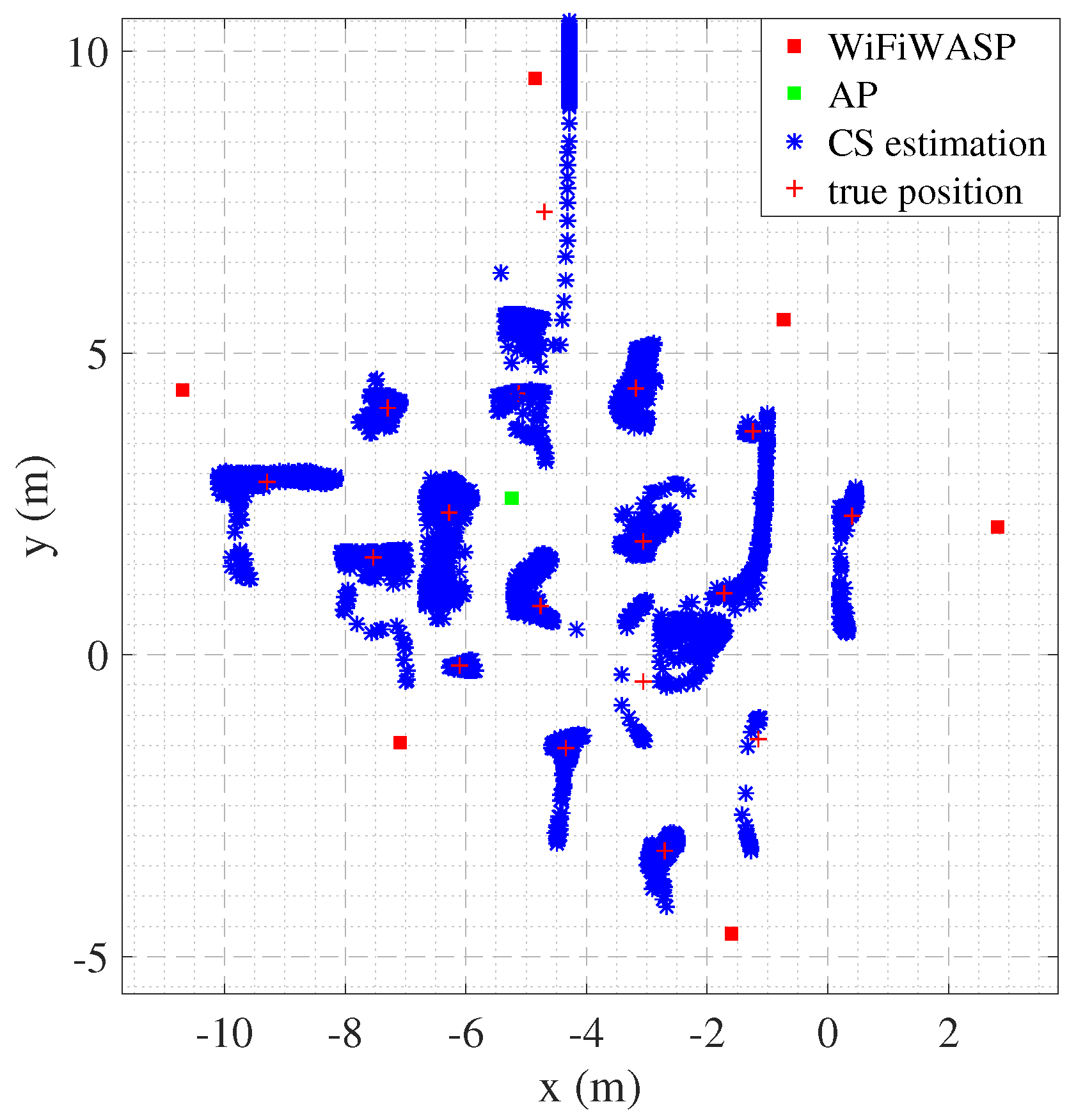
4.1. Outdoor Test
4.2. Indoor Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| RSSI | Received signal strength indicator |
| CSI | Channel state information |
| CS | Compressive sensing |
| CIR | Channel impulse response |
| TOA | Time-of-arrival |
| TDOA | Time-difference-of-arrival |
| AP | Access point |
| WiFi-WASP | WiFi-based wireless ad hoc system for positioning |
| OFDM | Orthogonal frequency-division multiplexing |
| LOS | Line-of-sight |
| BP | Back propagation |
| RLS-DLA | Recursive least squares dictionary learning algorithm |
| RIP | Restricted isometry property |
| CNN | Convolutional neural network |
| AOA | Angle of arrival |
| MUSIC | Multiple signal classification |
| ESPRIT | Estimating signal parameters via rotational invariance techniques |
| CFR | Channel frequency response |
References
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Hedley, M.; Zhang, J. Accurate wireless localization in sports. Computer 2012, 45, 64–70. [Google Scholar] [CrossRef]
- Chen, L.; Zhou, X.; Chen, F.; Yang, L.-L.; Chen, R. Carrier Phase Ranging for Indoor Positioning with 5G NR Signals. IEEE Internet Things J. 2022, 9, 10908–10919. [Google Scholar] [CrossRef]
- Gu, Y.; Ren, F. Energy-Efficient Indoor Localization of Smart Hand-Held Devices Using Bluetooth. IEEE Access 2015, 3, 1450–1461. [Google Scholar] [CrossRef]
- Kriz, P.; Maly, F.; Kozel, T. Improving indoor localization using Bluetooth low energy beacons. Mobile Inf. Syst. 2016, 2016, 2083094. [Google Scholar] [CrossRef] [Green Version]
- Fascista, A.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. Low-Complexity Accurate Mmwave Posi-tioning for Single-Antenna Users Based on Angle-of-Departure and Adaptive Beamforming. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 4866–4870. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. Radar: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Zhou, Z.; Shangguan, L.; Zheng, X.; Yang, L.; Liu, Y. Design and implementation of an RFID-based customer shopping behavior mining system. IEEE/ACM Trans. Netw. 2017, 25, 2405–2418. [Google Scholar] [CrossRef]
- Kempke, B.; Pannuto, P.; Campbell, B.; Dutta, P. SurePoint: Exploiting ultra wideband flooding and diversity to provide robust, scalable, high-fidelity indoor localization. In Proceedings of the 14th ACM Conference on Embedded Network Sensor Systems (CD-ROM), Stanford, CA, USA, 14–16 November 2016; pp. 137–149. [Google Scholar]
- Shu, Y.; Bo, C.; Shen, G.; Zhao, C.; Li, L.; Zhao, F. Magicol: Indoor localization using pervasive magnetic field and opportunistic WiFi sensing. IEEE J. Sel. Areas Commun. 2015, 33, 1443–1457. [Google Scholar] [CrossRef]
- Pathak, P.H.; Feng, X.; Hu, P.; Mohapatra, P. Visible light communication, networking, and sensing: A survey, potential and challenges. IEEE Commun. Surveys Tuts. 2015, 17, 2047–2077. [Google Scholar] [CrossRef]
- Hauschildt, D.; Kirchhof, N. Advances in thermal infrared localization: Challenges and solutions. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–8. [Google Scholar]
- Moutinho, J.N.; Araújo, R.E.; Freitas, D. Indoor localization with audible sound—Towards practical imple-mentation. Pervasive Mob. Comput. 2016, 29, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Shao, H.-R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- He, S.; Chan, S.-H.G. WiFi fingerprint-based indoor positioning: Recent advances and comparisons. IEEE Commun. Surveys Tuts. 2015, 18, 466–490. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi sensing with channel state information: A survey. ACM Comput. Surv. 2019, 52, 46. [Google Scholar] [CrossRef] [Green Version]
- Wu, K.; Xiao, J.; Yi, Y.; Chen, D.; Luo, X.; Ni, L.M. CSI-Based Indoor Localization. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1300–1309. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Cheng, Q.; Deng, Z.; Fu, X.; Zheng, X. C-Map: Hyper-Resolution Adaptive Preprocessing System for CSI Amplitude-based Fingerprint Localization. IEEE Access 2019, 7, 135063–135075. [Google Scholar] [CrossRef]
- Chen, L.; Ahriz, I.; Le Ruyet, D. Ruyet . CSI-Based Probabilistic Indoor Position Determination: An Entropy Solution. IEEE Access 2019, 7, 170048–170061. [Google Scholar] [CrossRef]
- Sanam, T.F.; Godrich, H. A Multi-View Discriminant Learning Approach for Indoor Localization Using Amplitude and Phase Features of CSI. IEEE Access 2020, 8, 59947–59959. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, J.; Ma, X.; Feng, X.; Wang, H. CSI-Based Device-Free Wireless Localization and Activity Recognition Using Radio Image Features. IEEE Trans. Veh. Technol. 2017, 66, 10346–10356. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.; Li, W.; Tao, X.; Zhang, P. ConFi: Convolutional Neural Networks Based Indoor WiFi Localization Using Channel State Information. IEEE Access 2017, 5, 18066–18074. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, H.; Li, P.; Li, J. A Novel Passive Indoor Localization Method by Fusion CSI Amplitude and Phase Information. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017. [Google Scholar]
- Li, Z.; Acuna, D.B.; Zhao, Z.; Carrera, J.L.; Braun, T. Fine-grained Indoor Tracking by Fusing Inertial Sensor and Physical Layer Information in WLANs. In Proceedings of the IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016. [Google Scholar]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter level localization using WiFi. SIGCOMM Comput. Commun. Rev. 2015, 45, 269–282. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Jamieson, K. Array Track: A Fine-Grained Indoor Location System. In Proceedings of the Usenix Conference on Networked Systems Design and Implementation, USENIX Association, Lombard, IL, USA, 2–5 April 2013. [Google Scholar]
- Sathyan, T.; Humphrey, D.; Hedley, M. WASP: A system and algorithms for accurate radio localization using low-cost hardware. IEEETrans. Syst. Man Cybern. C Appl. Rev. 2011, 41, 211–222. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Collings, I.B. New Efficient Indoor Cooperative Localization Algorithm with Empirical Ranging Error Model. IEEE J. Sel. Areas Commun. 2015, 33, 1407–1417. [Google Scholar] [CrossRef]
- Li, S.; Hedley, M.; Bengston, K.; Johnson, M.; Humphrey, D.; Kajan, A.; Bhaskar, N. TDOA-based passive localization of standard WiFi devices. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Cheng, P.; Chen, Z.; de Hoog, F.; Sung, C.K. Sparse Blind Carrier-Frequency Offset Estimation for OFDMA Uplink. IEEE Trans. Commun. 2016, 64, 5254–5265. [Google Scholar] [CrossRef]
- Ye, H.; Li, G.Y.; Juang, B.H. Power of deep learning for channel estimation and signal detection in OFDM systems. IEEE Wirel. Commun. Lett. 2018, 7, 114–117. [Google Scholar] [CrossRef]
- Fajar, M.C.A.; Fatmawati, M.; Wulandari, P.; Astharini, D. Analysis of DFT and FFT Signal Transformation with Hamming Window in LabVIEW. In Proceedings of the 2020 2nd International Conference on Broadband Communications, Wireless Sensors and Powering (BCWSP), Yogyakarta, Indonesia, 28–30 September 2020; pp. 79–83. [Google Scholar] [CrossRef]
- Zhu, C.; Fan, R.; Sun, J.; Luo, M.; Zhang, Y. Exploring the fluctuant transmission characteristics of Air Quality Index based on time series network model. Ecol. Indic. 2020, 108, 1–13. [Google Scholar] [CrossRef]
- Hsieh, W.W.; Wu, A. Nonlinear singular spectrum analysis by neural networks. Neural Netw. 2002, 3, 2819–2824. [Google Scholar]
- Xu, J.; Zhang, L.; Zhang, D. External Prior Guided Internal Prior Learning for Real-World Noisy Image Denoising. IEEE Trans. Image Process. 2018, 27, 2996–3010. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.N.; Yang, Y.W.; Xiao, X.C.; Zou, A.; Li, W. Weights direct determination of a spline neural network. Syst. Eng. Electron. 2009, 31, 2685–2688. [Google Scholar]
- Zhang, Y.; Yang, Y.; Li, W. Weights Direct Determination of Neural Network; Sun Yat-sen University Press: Guangzhou, China, 2010. [Google Scholar]
- Candes, E.J.; Tao, T. Decoding by linear programming. IEEE Trans. Inf. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef] [Green Version]
- Tošić, T.; Frossard, P. Graph-based regularization for spherical signal interpolation. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 878–881. [Google Scholar] [CrossRef] [Green Version]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Candes, E.; Wakin, M. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Rossi, M.; Haimovich, A.; Eldar, Y. Spatial compressive sensing for MIMO radar. IEEE Trans. Signal Process. 2014, 62, 419–430. [Google Scholar] [CrossRef] [Green Version]
- Sung, C.K.; de Hoog, F.; Chen, Z.; Cheng, P.; Popescu, D.C. Interference Mitigation Based on Bayesian Compressive Sensing for Wireless Localization Systems in Unlicensed Band. IEEE Trans. Hicular Technol. 2017, 66, 7038–7049. [Google Scholar] [CrossRef]
- Humphrey, D.; Hedley, M. Prior Models for Indoor Super-Resolution Time of Arrival Estimation. In Proceedings of the IEEE Vehicular Technology Conference, Barcelona, Spain, 26–29 April 2009. [Google Scholar]
- Pahlavan, K.; Levesque, A.H. Wireless Information Networks; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Peng, A.; Tang, B.; Ou, G.; Lu, X. The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location. Sensors 2022, 22, 5364. https://doi.org/10.3390/s22145364
Hu Y, Peng A, Tang B, Ou G, Lu X. The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location. Sensors. 2022; 22(14):5364. https://doi.org/10.3390/s22145364
Chicago/Turabian StyleHu, Yunbing, Ao Peng, Biyu Tang, Guojian Ou, and Xianzhi Lu. 2022. "The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location" Sensors 22, no. 14: 5364. https://doi.org/10.3390/s22145364
APA StyleHu, Y., Peng, A., Tang, B., Ou, G., & Lu, X. (2022). The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location. Sensors, 22(14), 5364. https://doi.org/10.3390/s22145364