
A Wi-Fi Indoor Positioning Method Based on an Integration of EMDT and WKNN


Abstract
:1. Introduction
- To deal with RSSI fluctuation, the RSSIs need to be integrated into nonlinear and non-stationary RSSI sequences. Then an EMD method for adaptively decomposing the RSSI sequence is proposed.
- We set the fluctuation coefficients of intrinsic mode functions (IMF) that can reflect the degree of IMF fluctuation. Then new criteria of IMF selection are proposed based on energy analysis and fluctuation coefficients. The method divides IMFs decomposed by EMD into the fluctuation-domain IMFs (FD-IMF) and the effective IMFs (E-IMF) according to the characteristics of IMFs.
- An improved WKNN method is proposed: a secondary selection method is used to remove the matching RPs far from the geometric center of the K initial matching RPs. The Euclidean distance of the matching RPs and the Euclidean distance of fingerprints are combined to obtain more precise weights. The improved WKNN avoids the deviated matching RPs due to RSSI fluctuation and further corrects the positioning accuracy by combined weights.
2. Related Work
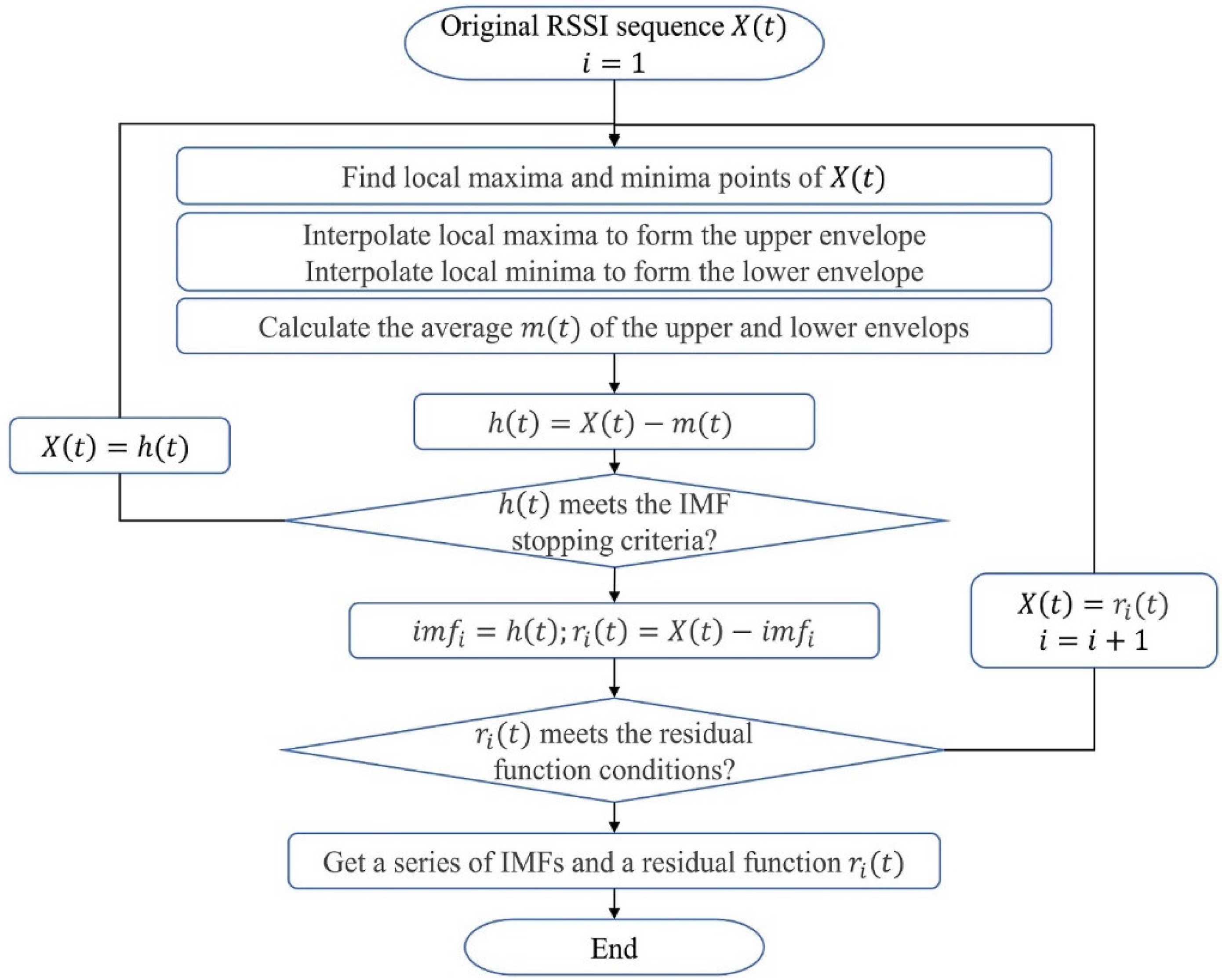
2.1. EMD
- 1.
- Find out all the local maxima in , and interpolate them to form an upper envelope. In the same way, form a lower envelope according to all the local minima.
- 2.
- Calculate the mean envelopes by averaging the upper and lower envelopes.
- 3.
- Calculate a temporary local oscillation :
- 4.
- If meets the IMF stopping criteria, then obtain the first IMF: , otherwise repeat Steps (1) to (2) for until is obtained.
- 5.
- Calculate the residue :
- 6.
- Repeat Steps (1) to (5) by using to obtain until approaches zero or shows a monotonic trend.
2.2. Fingerprint Positioning Principle
3. The Proposed Method
3.1. RSSI Sequence
3.2. EMDT
3.2.1. IMF Selection Criteria
- 1.
- Estimate the standard deviation of the fluctuation in by using a robust estimator [32] based on the IMF medianwhere is the number of IMFs; is the sampling point of .
- 2.
- Calculate the fluctuation energy of the :
- 3.
- Calculate the standard deviation of :
- 4.
- Construct the fluctuation coefficient of the :
- 5.
- Estimate the possible fluctuation-only energy according to the fluctuation coefficient and the fluctuation energy of . The possible fluctuation-only energy of the is approximately as
3.2.2. Threshold Smoothing
3.3. Improved WKNN
- 1.
- Obtain the K initial matching RPs by WKNN: .
- 2.
- Geometry analysis of the initial matching RPs, calculating the Euclidean distance between coordinates and the center coordinates .
- 3.
- Secondary selection: setting a threshold , and if , the is judged to be a deviated point and should be removed, finally obtaining the RPs with the closest distance from the . The value of is discussed in Section 4.
- 4.
- Calculate the center coordinates and Euclidean distance ,
- 5.
- Combined weight: obtaining the combined weight according to fingerprints similarity metric and coordinates Euclidean distance ,
- 6.
- Predict coordinates
3.4. EMDT-WKNN
4. Discussion
4.1. Experimental Environment
4.2. Data Pre-Processing
4.3. EMDT Experiment
4.3.1. EMDT Smoothing RSSI Sequence
4.3.2. Processing of Outliers −105 dBm
4.4. Positioning Results and Comparison
4.4.1. Impact of EMDT
4.4.2. Impact of the Improved WKNN
4.4.3. Impact of EMDT-WKNN
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; Figueiredo e Silva, P. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Hatem, E.; Fortes, S.; Colin, E.; Abou-Chakra, S.; Laheurte, J.M.; El-Hassan, B. Accurate and Low-Complexity Auto-Fingerprinting for Enhanced Reliability of Indoor Localization Systems. Sensors 2021, 21, 5346. [Google Scholar] [CrossRef] [PubMed]
- García-Paterna, P.J.; Martínez-Sala, A.S.; Sánchez-Aarnoutse, J.C. Empirical Study of a Room-Level Localization System Based on Bluetooth Low Energy Beacons. Sensors 2021, 21, 3665. [Google Scholar] [CrossRef] [PubMed]
- Cahyadi, W.A.; Chung, Y.H.; Adiono, T. Infrared indoor positioning using invisible beacon. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 341–345. [Google Scholar]
- Shen, M.; Wang, Y.; Jiang, Y.; Ji, H.; Wang, B.; Huang, Z. A New Positioning Method Based on Multiple Ultrasonic Sensors for Autonomous Mobile Robot. Sensors 2020, 20, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tong, H.; Xin, N.; Su, X.; Chen, T.; Wu, J. A Robust PDR/UWB Integrated Indoor Localization Approach for Pedestrians in Harsh Environments. Sensors 2020, 20, 193. [Google Scholar] [CrossRef] [Green Version]
- Feng, X.; Nguyen, K.A.; Luo, Z. A survey of deep learning approaches for WiFi-based indoor positioning. J. Inf. Telecommun. 2022, 6, 163–216. [Google Scholar] [CrossRef]
- Kitt, B.; Geiger, A.; Lategahn, H. Visual odometry based on stereo image sequences with RANSAC-based outlier rejection scheme. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; pp. 486–492. [Google Scholar]
- Jeong, J.P.; Yeon, S.; Kim, T.; Lee, H.; Kim, S.M.; Kim, S. SALA: Smartphone-assisted localization algorithm for positioning indoor IoT devices. Wirel. Netw. 2018, 24, 27–47. [Google Scholar] [CrossRef]
- Billa, A.; Shayea, I.; Alhammadi, A.; Abdullah, Q.; Roslee, M. An overview of indoor localization technologies: Toward IoT navigation services. In Proceedings of the 2020 IEEE 5th International Symposium on Telecommunication Technologies (ISTT), Shah Alam, Malaysia, 9–11 November 2020; pp. 76–81. [Google Scholar]
- Pan, H.; Xiang, Y.; Xiong, J.; Zhao, Y.; Huang, Z.; Xiao, X. Application of a WiFi/Geomagnetic Combined Positioning Method in a Single Access Point Environment. Wirel. Commun. Mob. Comput. 2021, 2021, 9717629. [Google Scholar] [CrossRef]
- Sinha, R.S.; Hwang, S.-H. Improved RSSI-Based Data Augmentation Technique for Fingerprint Indoor Localisation. Electronics 2020, 9, 851. [Google Scholar] [CrossRef]
- Bullmann, M.; Fetzer, T.; Ebner, F.; Ebner, M.; Deinzer, F.; Grzegorzek, M. Comparison of 2.4 GHz WiFi FTM- and RSSI-based indoor positioning methods in realistic scenarios. Sensors 2020, 20, 4515. [Google Scholar] [CrossRef]
- Mahapatra, R.K.; Shet, N.S.V. Localization Based on RSSI Exploiting Gaussian and Averaging Filter in Wireless Sensor Network. Arab. J. Sci. Eng. 2018, 43, 4145–4159. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, R.; Teng, J.; Zhou, H.; Luan, Q. Indoor positioning method based on adaptive correction of Manhattan distance. Navig. Position. Timing 2019, 6, 94–102. [Google Scholar]
- Aiboud, Y.; Elhassani, I.; Griguer, H.; Drissi, M. Rssi optimization method for indoor positioning systems. In Proceedings of the 2015 27th International Conference on Microelectronics (ICM), Casablanca, Morocco, 20–23 December 2015; pp. 246–248. [Google Scholar]
- Zafari, F.; Papapanagiotou, I.; Hacker, T.J. A novel Bayesian filtering based algorithm for RSSI-based indoor localization. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–7. [Google Scholar]
- Zhang, L.; Tan, T.; Gong, Y.; Yang, W. Fingerprint Database Reconstruction Based on Robust PCA for Indoor Localization. Sensors 2019, 19, 2537. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced fingerprinting and trajectory prediction for IoT localization in smart buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1294–1307. [Google Scholar] [CrossRef]
- Nikoukar, A.; Abboud, M.; Samadi, B.; Güneş, M.; Dezfouli, B. Empirical analysis and modeling of Bluetooth low-energy (BLE) advertisement channels. In Proceedings of the 2018 17th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), Capri, Italy, 20–22 June 2018; pp. 1–6. [Google Scholar]
- Lu, W.; Cheng, Y.; Fang, S. A study of singular value decomposition for wireless LAN location fingerprinting. In Proceedings of the 2016 IEEE Second International Conference on Multimedia Big Data (BigMM), Taipei, Taiwan, 20–22 April 2016; pp. 466–470. [Google Scholar]
- Liu, J.; Jia, B.; Guo, L.; Huang, B.; Wang, L.; Baker, T. CTSLoc: An indoor localization method based on CNN by using time-series RSSI. Clust. Comput. 2022, 25, 2573–2584. [Google Scholar] [CrossRef]
- Zhou, R.; Yang, Y.; Chen, P. An RSS transform—Based WKNN for indoor positioning. Sensors 2021, 21, 5685. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Boudraa, A.O.; Cexus, J.C. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Lakshmi, M.D.; Murugan, S.S.; Padmapriya, N.; Somasekar, M. Texture analysis on side scan sonar images using EMD, XCS-LBP and statistical co-occurrence. In Proceedings of the 2019 International Symposium on Ocean Technology (SYMPOL), Ernakulam, India, 11–13 December 2019; pp. 91–97. [Google Scholar]
- Kaemarungsi, K.; Krishnamurthy, P. Modeling of indoor positioning systems based on location fingerprinting. In IEEE Infocom 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 1012–1022. [Google Scholar]
- Guo, J.; Zhen, D.; Li, H.; Shi, Z.; Gu, F.; Ball, A.D. Fault feature extraction for rolling element bearing diagnosis based on a multi-stage noise reduction method. Measurement 2019, 139, 226–235. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Hu, Y. An enhanced PCA-based chiller sensor fault detection method using ensemble empirical mode decomposition based denoising. Energy Build. 2019, 183, 311–324. [Google Scholar] [CrossRef]
- Hu, M.; Zhang, S.; Dong, W.; Xu, F.; Liu, H. Adaptive denoising algorithm using peak statistics-based thresholding and novel adaptive complementary ensemble empirical mode decomposition. Inf. Sci. 2021, 563, 269–289. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Chen, B.; Zhang, W.; Huang, G. An improved complementary ensemble empirical mode decomposition with adaptive noise and its application to rolling element bearing fault diagnosis. ISA Trans. 2019, 91, 218–234. [Google Scholar] [CrossRef] [PubMed]
- Mohguen, W.; Bekka, R.E.H. Empirical mode decomposition based denoising by customized thresholding. Int. J. Electron. Commun. Eng. 2017, 11, 519–524. [Google Scholar]
- Lei, S.; Lu, M.; Lin, J.; Zhou, X.; Yang, X. Remote sensing image denoising based on improved semi-soft threshold. Signal Image Video Processing 2021, 15, 73–81. [Google Scholar] [CrossRef]
- Xie, X.; Xu, W.; Huang, C.; Fan, X. New islanding detection method with adaptively threshold for microgrid. Electr. Power Syst. Res. 2021, 195, 107167. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, Y.; Li, G. A denoising method for ship radiated noise based on Spearman variational mode decomposition, spatial-dependence recurrence sample entropy, improved wavelet threshold denoising, and Savitzky-Golay filter. Alex. Eng. J. 2021, 60, 3379–3400. [Google Scholar] [CrossRef]
- Pomalo, M.; El Ioini, N.; Pahl, C.; Barzegar, H.R. A data generator for cloud-edge vehicle communication in multi domain cellular networks. In Proceedings of the 2020 7th International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Paris, France, 14–16 December 2020; pp. 1–8. [Google Scholar]
- Nakamura, M.; Akiyama, T.; Sugimoto, M.; Hashizume, H. 3d fdm-pam: Rapid and precise indoor 3d localization using acoustic signal for smartphone. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 123–126. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Monday | Tuesday | Wednesday | Thursday | Friday |
|---|---|---|---|---|---|
| 14:00 | Test_1 | Test_3 | Test_5 | Train_1 | Train_3 |
| 19:00 | Test_2 | Test_4 | Test_6 | Train_2 | Train_4 |
| IMF | |||
|---|---|---|---|
| 2.06 | 0.89 | 1.84 | |
| 0.85 | 0.39 | 0.80 | |
| 0.53 | 0.27 | 0.56 | |
| 1.22 | 0.73 | 1.51 | |
| 1.98 | 0.62 | 1.28 |
| Algorithm | 1 m | 1.5 m | 2 m | 2.5 m | 3 m |
|---|---|---|---|---|---|
| Original RSSI | 28.05% | 58.04% | 70.53% | 78.45% | 83.03% |
| EMDT | 30.29% | 70.35% | 78.45% | 85.29% | 88.45% |
| EMDT-WKNN | 40.77% | 75.23% | 82.67% | 87.44% | 90.71% |
| Algorithm | Mean Error (m) | 68% Error (m) | 75% Error (m) | 95% Error (m) | Error SD (m) |
|---|---|---|---|---|---|
| Original RSSI | 1.93 | 1.84 | 2.25 | 5.82 | 1.89 |
| EMDT | 1.62 | 1.41 | 1.74 | 4.61 | 1.61 |
| EMDT-WKNN | 1.52 | 1.34 | 1.48 | 4.52 | 1.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, R.; Meng, F.; Zhou, J.; Teng, J. A Wi-Fi Indoor Positioning Method Based on an Integration of EMDT and WKNN. Sensors 2022, 22, 5411. https://doi.org/10.3390/s22145411
Zhou R, Meng F, Zhou J, Teng J. A Wi-Fi Indoor Positioning Method Based on an Integration of EMDT and WKNN. Sensors. 2022; 22(14):5411. https://doi.org/10.3390/s22145411
Chicago/Turabian StyleZhou, Rong, Fengying Meng, Jing Zhou, and Jing Teng. 2022. "A Wi-Fi Indoor Positioning Method Based on an Integration of EMDT and WKNN" Sensors 22, no. 14: 5411. https://doi.org/10.3390/s22145411