
Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping




Abstract
:1. Introduction
2. Materials and Methods
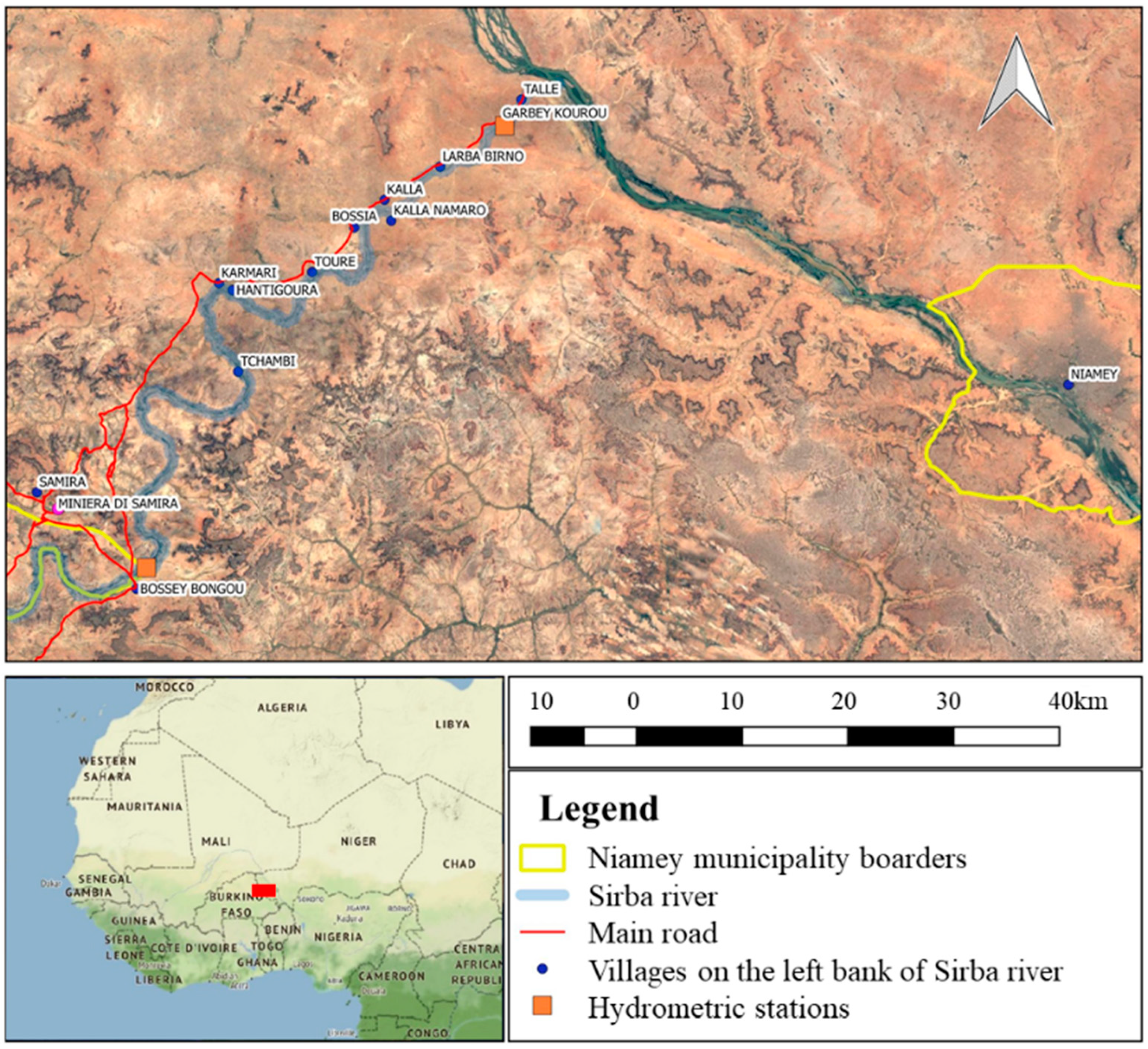
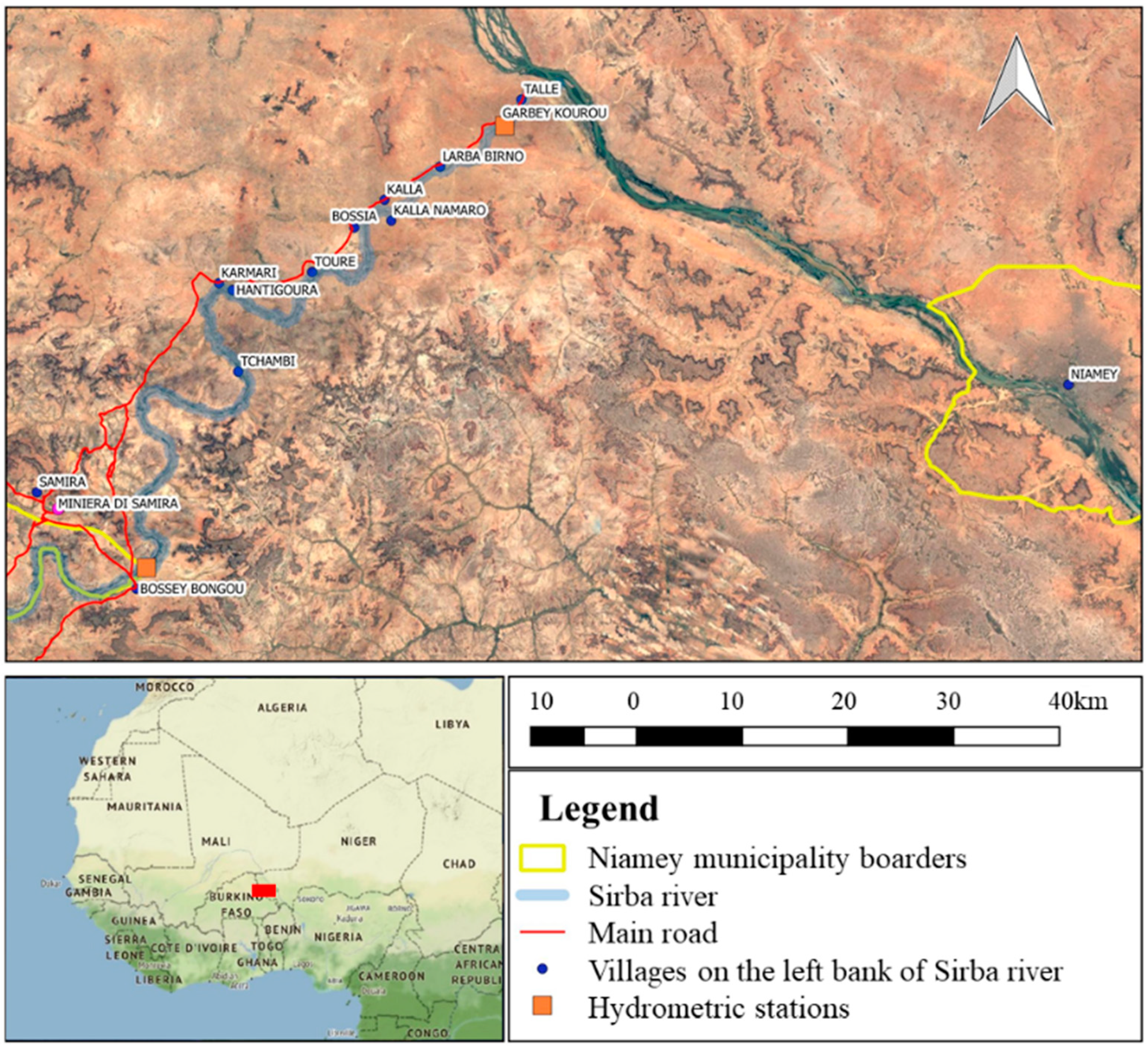
2.1. Study Area and Contextualization
2.2. Data Collection
2.2.1. UAS Flights
2.2.2. Orthophoto and DEM Generation
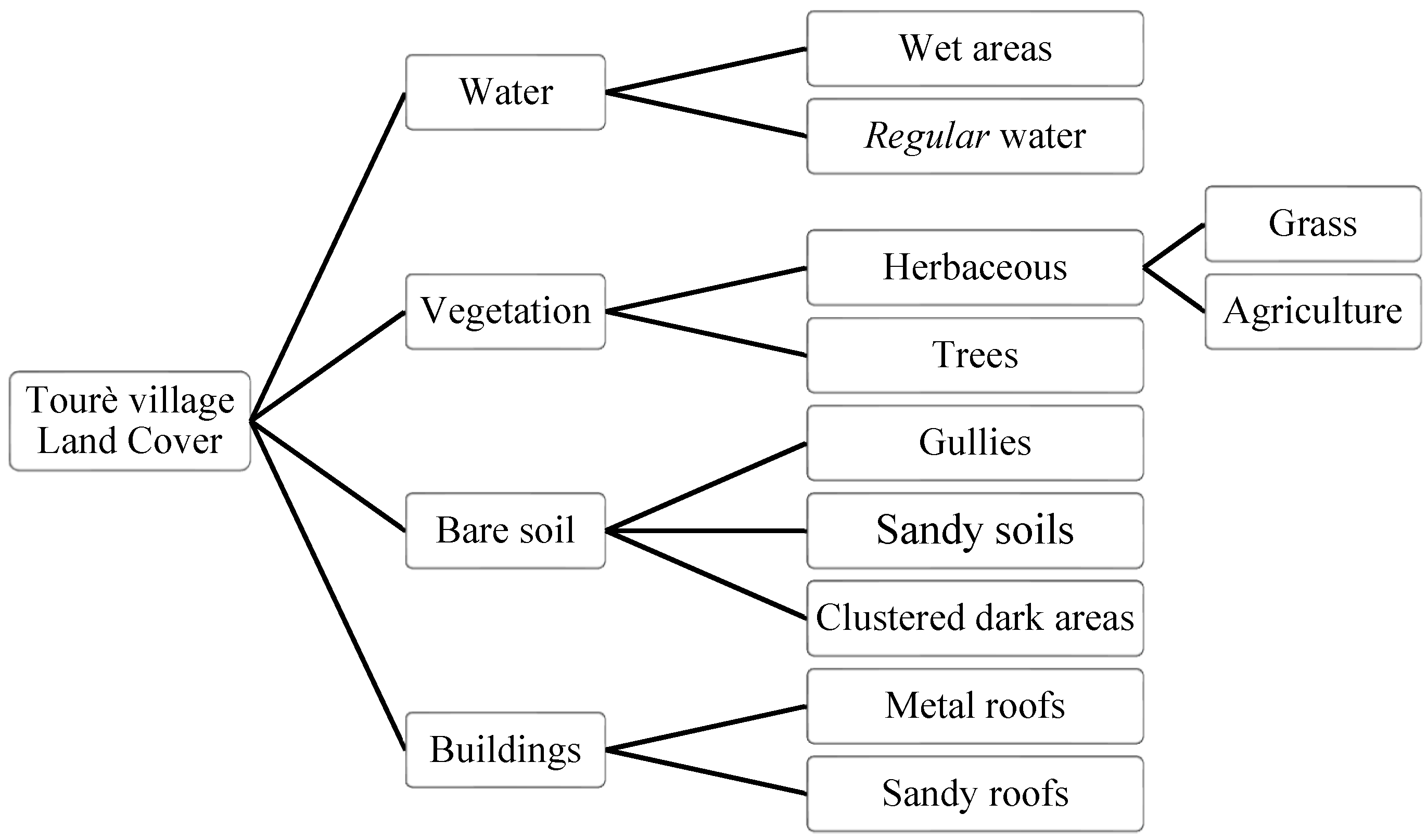
2.2.3. Classification System
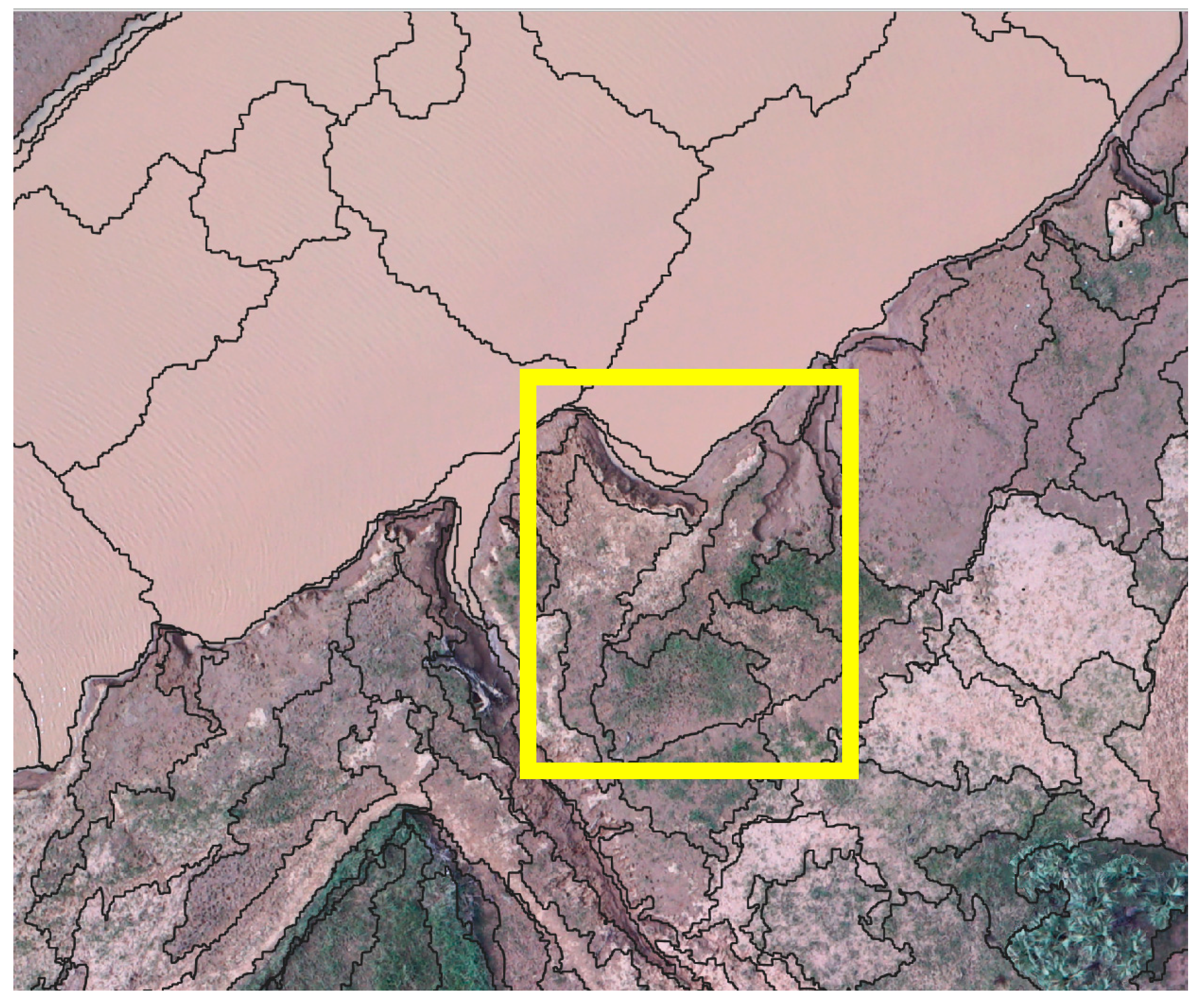
2.2.4. Features Extraction and Segmentation
2.2.5. Training Selection and Classification Model
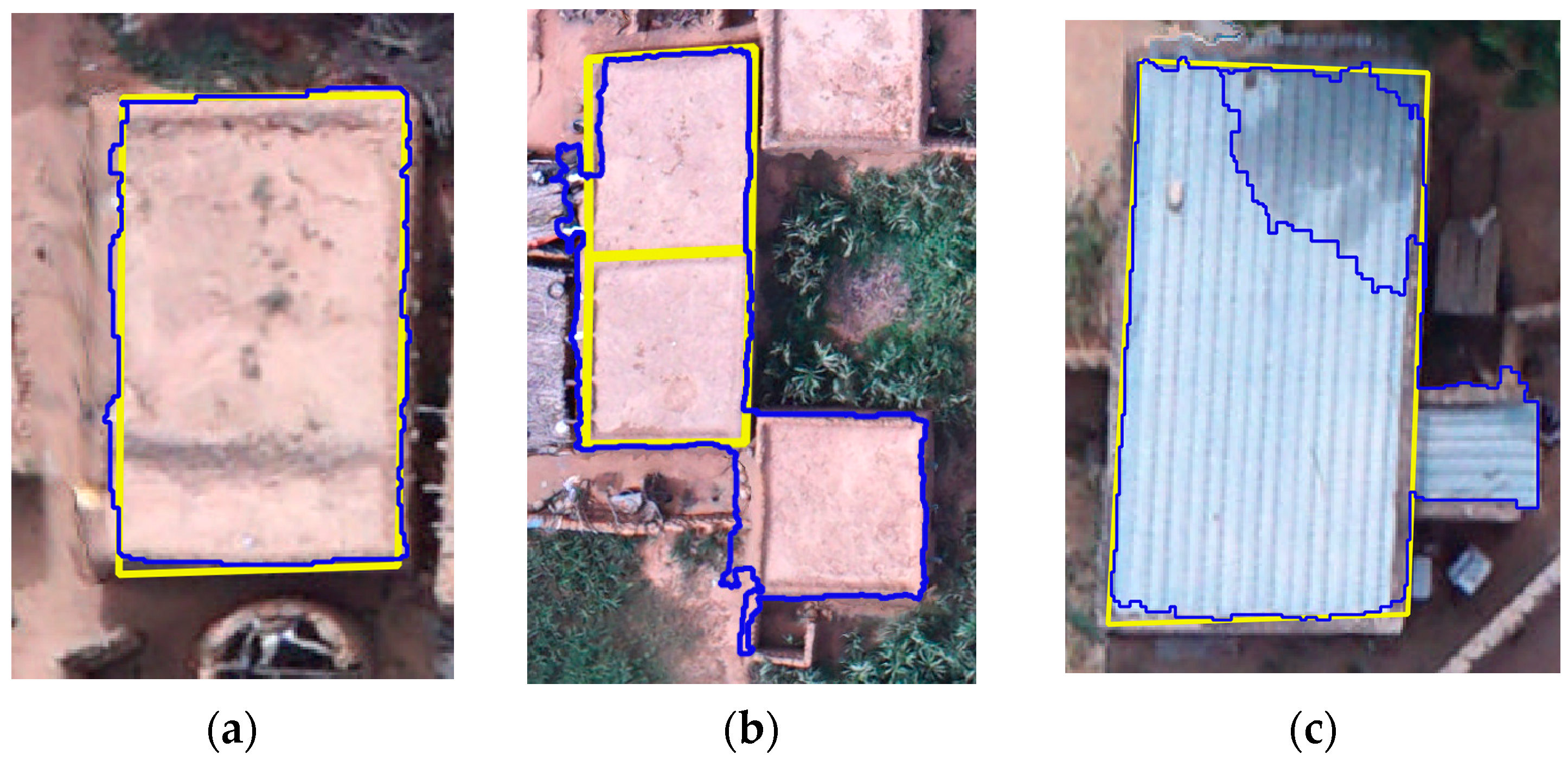
2.2.6. Accuracy Assessment
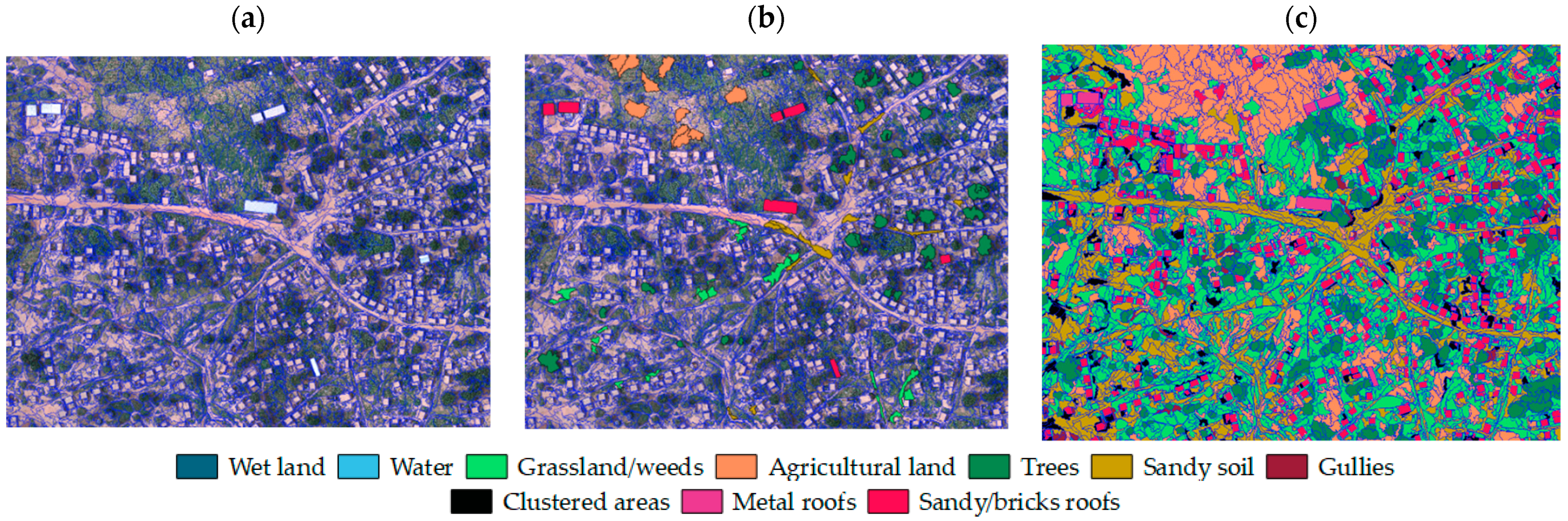
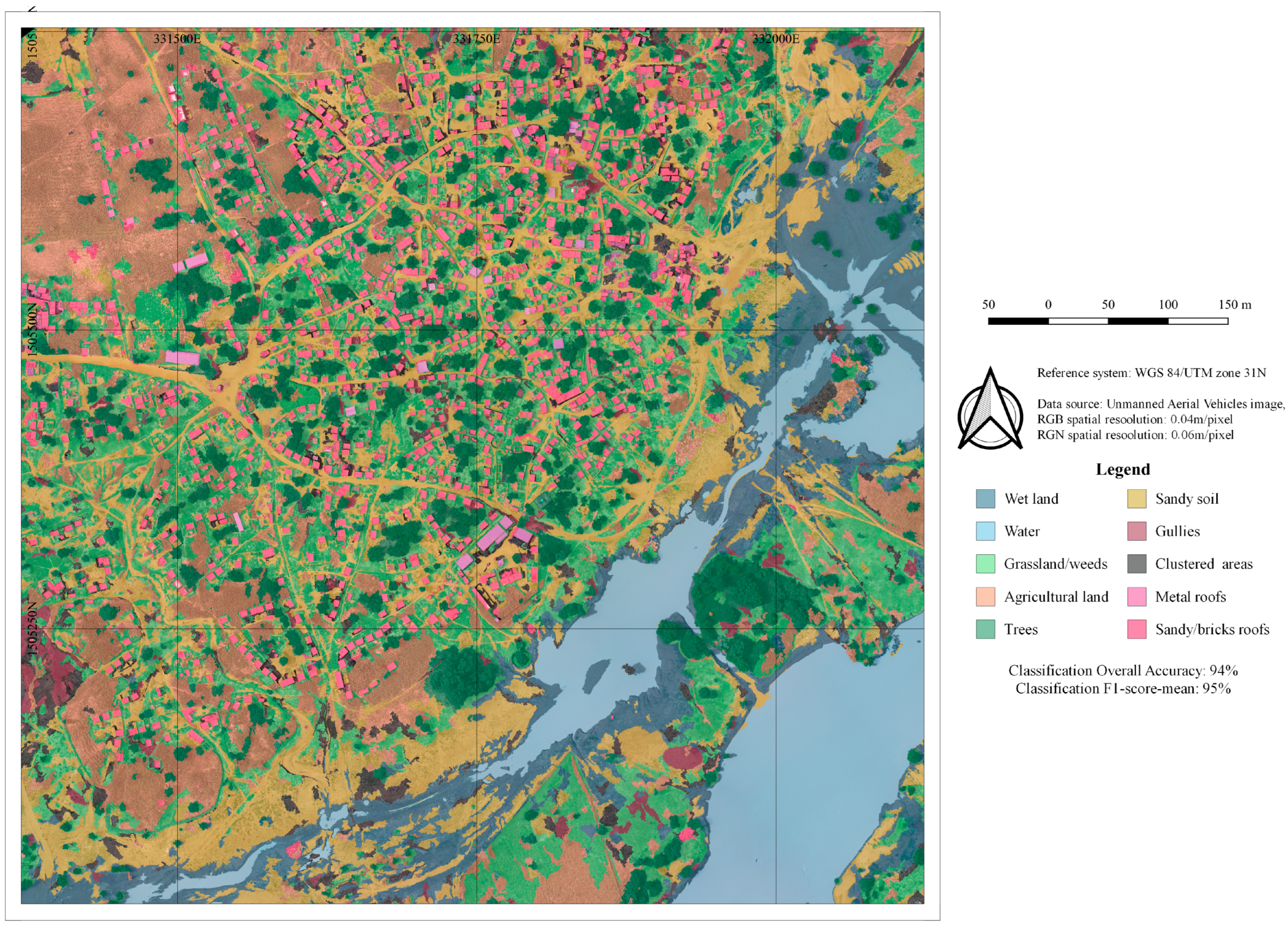
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Group | Feature Name | Note | Software | Segmentation | Classification |
|---|---|---|---|---|---|
| Spectral | Normalized Difference Water Index (NDWI) | (McFeeters, 1996) | Orfeo toolbox | X | X Mean value |
| Enhanced Vegetation Index (EVI) | Orfeo toolbox | X | X Mean value | ||
| HUE | Calculated on RGB | eCognition | X | ||
| HUE | Calculate on NIR | eCognition | X | ||
| Normalized Difference Water Index (NDWI) | eCognition | X Standard deviation to neighborhood | |||
| Enhanced Vegetation Index (EVI) | eCognition | X Standard deviation to neighborhood | |||
| Brightness | eCognition | X | |||
| Edge-extractor | Sobel | eCognition | X Mean value | ||
| Sobel | eCognition | X Standard deviation to neighborhood | |||
| Textural [36] | Grey Level Co-occurrence Matrix (GLCM) Sum Variance | Calculated on NIR channel | Orfeo toolbox | X | X Mean value |
| Grey Level Co-occurrence Matrix (GLCM) Dissimilarity | Calculated on Green Channel | Orfeo toolbox | X | X Mean value | |
| Grey Level Co-occurrence Matrix (GLCM) Sum Average | Calculated on Green Channel | Orfeo toolbox | X | X Mean value | |
| Grey Level Co-occurrence Matrix (GLCM) Sum Variance | Calculated on Green Channel | Orfeo toolbox | X | X Mean value | |
| Grey Level Co-occurrence Matrix (GLCM) Dissimilarity | Calculated on NIR channel | Orfeo toolbox | X | X Mean value | |
| Grey Level Co-occurrence Matrix (GLCM) Sum Variance | eCognition | X Standard deviation to neighborhood | |||
| Grey Level Co-occurrence Matrix (GLCM) Dissimilarity | eCognition | X Standard deviation to neighborhood | |||
| Grey Level Co-occurrence Matrix (GLCM) Sum Average | eCognition | X Standard deviation to neighborhood | |||
| Grey Level Co-occurrence Matrix (GLCM) Sum Variance | eCognition | X Standard deviation to neighborhood | |||
| Grey Level Co-occurrence Matrix (GLCM) Dissimilarity | eCognition | X Standard deviation to neighborhood | |||
| Elevation | Digital Surface Model | Calculated on RGB | / | X | X Mean value |
| Digital Surface Model | Calculated on RGB | eCognition | X Standard deviation to neighborhood | ||
| Slope | |||||
| RGB dataset | Red | / | / | X | X Mean value |
| Green | / | / | X | X Mean value | |
| Blue | / | / | X | X Mean value | |
| Red | / | eCognition | X Standard deviation to neighborhood | ||
| Green | / | eCognition | X Standard deviation to neighborhood | ||
| Blue | / | eCognition | X Standard deviation to neighborhood | ||
| NIR dataset | Red_2 | / | / | X | X Mean value |
| Green_2 | / | / | X | X Mean value | |
| NIR | / | / | X | X Mean value | |
| Red_2 | / | eCognition | X Standard deviation to neighborhood | ||
| Green_2 | / | eCognition | X Standard deviation to neighborhood | ||
| NIR | / | eCognition | X Standard deviation to neighborhood | ||
| Relation to neighbors | Mean difference to neighbors | Calculated on DSM | eCognition | X | |
| Geometric | Length/width | eCognition | X | ||
| Rectangular fit | eCognition | X | |||
| Radius of the smaller enclosing ellipse | eCognition | X | |||
| Compactness | eCognition | X |
Appendix B
| Algorithm | Parameters | Values | Computing Time | Layers (Weight) and Conditions |
|---|---|---|---|---|
| Houses | ||||
| Multiresolution segmentation | Scale parameter | 60 | 1:19 | DSM (1) GLCM_NIR_3 (1) Glcm_rgb_3 (2) Glcm_rgb_5 (1) Green_rgb (1) Nir (1) |
| Shape | 0.2 | |||
| Compactness | 0.8 | |||
| Assign class | Use class | Unclassified | 0:27 | Mean GLCM_adv_3_rgb >= 3.5 and Mean NDWI < 0.05 and Mean nDSM >= 4 And Mean diff. to neighbors DSM (0) >= 0.2 Mean |
| Assign class | Houses | |||
| Assign class | Use class | Unclassified | 0:0.06 | Rel. border to houses > 0.6 |
| Assign class | Houses | |||
| Merge Region | Use class | Houses | 0:0.04 | |
| Multiresolution segmentation | Scale parameter | 100 | 1:40 | Only houses GLCM_NIR_3 (1) Glcm_rgb_3 (2) Glcm_rgb_5 (1) |
| Shape | 0.8 | |||
| Compactness | 0.2 | |||
| Trees | ||||
| Merge Region | Use class | Unclassified | 0:03 | |
| Multiresolution segmentation | Scale parameter | 80 | 2:17 | Only unclassified DSM (1) GLCM_NIR_3 (1) Glcm_rgb_3 (1) Glcm_rgb_5 (1) Green_rgb (1) NDWI (1) Nir (1) |
| Shape | 0.1 | |||
| Compactness | 0.5 | |||
| Assign class | Use class | Unclassified | 0:21 | Mean diff. to neighbors DSM (0) > 1 and Mean NDWI < 0.03 |
| Assign class | Trees | |||
| Merge Region | Use class | Trees | 0:01 | |
| Grass | ||||
| Merge Region | Use class | Unclassified | 2:55 | |
| Multiresolution segmentation | Scale parameter | 200 | 2:37 | Only unclassified nDSM (1) Glcm_rgb_5 (1) Green_rgb (1) NDWI (1) Nir (1) Red (NIR dataset) (1) Red (RGB dataset) (1) |
| Shape | 0.25 | |||
| Compactness | 0.2 | |||
References
- Tiepolo, M.; Rosso, M.; Massazza, G.; Belcore, E.; Issa, S.; Braccio, S. Flood Assessment for Risk-Informed Planning along the Sirba River, Niger. Sustainability 2019, 11, 4003. [Google Scholar] [CrossRef] [Green Version]
- Descroix, L.; Moussa, I.B.; Genthon, P.; Sighomnou, D.; Mahé, G.; Mamadou, I.; Vandervaere, J.-P.; Gautier, E.; Maiga, O.F.; Rajot, J.-L.; et al. Impact of Drought and Land—Use Changes on Surface—Water Quality and Quantity: The Sahelian Paradox. Curr. Perspect. Contam. Hydrol. Water Resour. Sustain. 2013, 2, 64. [Google Scholar] [CrossRef] [Green Version]
- Fiorillo, E.; Crisci, A.; Issa, H.; Maracchi, G.; Morabito, M.; Tarchiani, V. Recent Changes of Floods and Related Impacts in Niger Based on the ANADIA Niger Flood Database. Climate 2018, 6, 59. [Google Scholar] [CrossRef] [Green Version]
- Tamagnone, P.; Massazza, G.; Pezzoli, A.; Rosso, M. Hydrology of the Sirba River: Updating and Analysis of Discharge Time Series. Water 2019, 11, 156. [Google Scholar] [CrossRef] [Green Version]
- Siejka, M.; Mika, M.; Salata, T.; Leń, P. Algorithm of Land Cover Spatial Data Processing for the Local Flood Risk Mapping. Surv. Rev. 2018, 50, 397–403. [Google Scholar] [CrossRef]
- United Nations Office for Disaster Risk Reduction (UNDRR). Sendai Framework for Disaster Risk Reduction 2015–2030; United Nations Office for Disaster Risk Reduction (UNDRR): Geneva, Switzerland, 2015. [Google Scholar]
- Pearson, L.; Pelling, M. The UN Sendai Framework for Disaster Risk Reduction 2015–2030: Negotiation Process and Prospects for Science and Practice. J. Extr. Even. 2015, 2, 1571001. [Google Scholar] [CrossRef]
- SF and the SDGs. Available online: https://www.undrr.org/implementing-sendai-framework/sf-and-sdgs (accessed on 16 June 2022).
- Kalantar, B.; Mansor, S.B.; Sameen, M.I.; Pradhan, B.; Shafri, H.Z.M. Drone-Based Land-Cover Mapping Using a Fuzzy Unordered Rule Induction Algorithm Integrated into Object-Based Image Analysis. Int. J. Remote Sens. 2017, 38, 2535–2556. [Google Scholar] [CrossRef]
- Malinowski, R.; Lewiński, S.; Rybicki, M.; Gromny, E.; Jenerowicz, M.; Krupiński, M.; Nowakowski, A.; Wojtkowski, C.; Krupiński, M.; Krätzschmar, E.; et al. Automated Production of a Land Cover/Use Map of Europe Based on Sentinel-2 Imagery. Remote Sens. 2020, 12, 3523. [Google Scholar] [CrossRef]
- Booth, D.B.; Hartley, D.; Jackson, R. Forest Cover, Impervious-Surface Area, and the Mitigation of Stormwater Impacts. J. Am. Water Resour. Assoc. 2002, 38, 835–845. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, G.; Wang, W.; Wang, Q.; Dai, F. Object-Based Land-Cover Supervised Classification for Very-High-Resolution UAV Images Using Stacked Denoising Autoencoders. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3373–3385. [Google Scholar] [CrossRef]
- Trevisiol, F.; Lambertini, A.; Franci, F.; Mandanici, E. An Object-Oriented Approach to the Classification of Roofing Materials Using Very High-Resolution Satellite Stereo-Pairs. Remote Sens. 2022, 14, 849. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B.; Aziz, O.S. Classification of Very High Resolution Aerial Photos Using Spectral-Spatial Convolutional Neural Networks. Available online: https://www.hindawi.com/journals/js/2018/7195432/?limit=all (accessed on 29 July 2020).
- Liu, T.; Abd-Elrahman, A. Multi-View Object-Based Classification of Wetland Land Covers Using Unmanned Aircraft System Images. Remote Sens. Environ. 2018, 216, 122–138. [Google Scholar] [CrossRef]
- Ma, L.; Fu, T.; Blaschke, T.; Li, M.; Tiede, D.; Zhou, Z.; Ma, X.; Chen, D. Evaluation of Feature Selection Methods for Object-Based Land Cover Mapping of Unmanned Aerial Vehicle Imagery Using Random Forest and Support Vector Machine Classifiers. ISPRS Int. J. Geo-Inf. 2017, 6, 51. [Google Scholar] [CrossRef]
- De Luca, G.; Silva, J.M.N.; Cerasoli, S.; Araújo, J.; Campos, J.; Di Fazio, S.; Modica, G. Object-Based Land Cover Classification of Cork Oak Woodlands Using UAV Imagery and Orfeo ToolBox. Remote Sens. 2019, 11, 1238. [Google Scholar] [CrossRef] [Green Version]
- Warner, T.T. Desert Meteorology; Cambridge University Press: Cambridge, UK, 2009; ISBN 978-1-139-44963-2. [Google Scholar]
- Moawad, M.B.; Aziz, A.O.A.; Mamtimin, B. Flash Floods in the Sahara: A Case Study for the 28 January 2013 Flood in Qena, Egypt. Geomat. Nat. Hazards Risk 2016, 7, 215–236. [Google Scholar] [CrossRef] [Green Version]
- Sene, K. Flash Floods: Forecasting and Warning; Springer: Dordrecht, The Netherlands, 2013; ISBN 978-94-007-5163-7. [Google Scholar]
- Bigi, V.; Pezzoli, A.; Rosso, M. Past and Future Precipitation Trend Analysis for the City of Niamey (Niger): An Overview. Climate 2018, 6, 73. [Google Scholar] [CrossRef] [Green Version]
- Oguntunde, P.G.; Lischeid, G.; Abiodun, B.J. Impacts of Climate Variability and Change on Drought Characteristics in the Niger River Basin, West Africa. Stoch. Environ. Res. Risk Assess. 2018, 32, 1017–1034. [Google Scholar] [CrossRef]
- Aich, V.; Koné, B.; Hattermann, F.F.; Paton, E.N. Time Series Analysis of Floods across the Niger River Basin. Water 2016, 8, 165. [Google Scholar] [CrossRef] [Green Version]
- Massazza, G.; Tamagnone, P.; Wilcox, C.; Belcore, E.; Pezzoli, A.; Vischel, T.; Panthou, G.; Housseini Ibrahim, M.; Tiepolo, M.; Tarchiani, V.; et al. Flood Hazard Scenarios of the Sirba River (Niger): Evaluation of the Hazard Thresholds and Flooding Areas. Water 2019, 11, 1018. [Google Scholar] [CrossRef] [Green Version]
- Massazza, G.; Tamagnone, P.; Pezzoli, A.; Housseini, M.; Belcore, E.; Tiepolo, M.; Rosso, M. Améliorations sur le Système D’observation du Bassin de la Rivière Sirba Pour la Gestion des Risques Naturels. In Proceedings of the Colloque International AMMA-CATCH, Niamey, Niger, 12–14 November 2018. [Google Scholar]
- Tiepolo, M.; Bacci, M.; Braccio, S. Multihazard Risk Assessment for Planning with Climate in the Dosso Region, Niger. Climate 2018, 6, 67. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Kim, M.; Seo, J.; Lee, J. A Comprehensive Method for GNSS Data Quality Determination to Improve Ionospheric Data Analysis. Sensors 2014, 14, 14971–14993. [Google Scholar] [CrossRef] [PubMed]
- Belcore, E.; Piras, M.; Dabove, P.; Massazza, G.; Rosso, M. Comparison of Free and Open PPP Services for Master-Base Positioning in Geodetic Disadvantaged Areas: Case Study along the Sirba River in Sub-Saharan Africa. In Proceedings of the GISTAM 2022, Online, 27–29 April 2022; pp. 37–47. [Google Scholar]
- Belcore, E.; Pezzoli, A.; Massazza, G.; Rosso, M.; Piras, M. Raspberry Pi 3 Multispectral Low-Cost Sensor for UAV-Based Remote Sensing. Case Study in South-West Niger. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 207–214. [Google Scholar] [CrossRef] [Green Version]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The Development and Evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Agisoft Metashape. Available online: https://www.agisoft.com/ (accessed on 12 February 2021).
- Pontoglio, E.; Grasso, N.; Cagninei, A.; Camporeale, C.; Dabove, P.; Lingua, A.M. Bathymetric Detection of Fluvial Environments through UASs and Machine Learning Systems. Remote Sens. 2020, 12, 4148. [Google Scholar] [CrossRef]
- Berberoğlu, S.; Akin, A.; Atkinson, P.M.; Curran, P.J. Utilizing Image Texture to Detect Land-Cover Change in Mediterranean Coastal Wetlands. Int. J. Remote Sens. 2010, 31, 2793–2815. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Du, P.; Samat, A.; Waske, B.; Liu, S.; Li, Z. Random Forest and Rotation Forest for Fully Polarized SAR Image Classification Using Polarimetric and Spatial Features. ISPRS J. Photogramm. Remote Sens. 2015, 105, 38–53. [Google Scholar] [CrossRef]
- Topouzelis, K.; Psyllos, A. Oil Spill Feature Selection and Classification Using Decision Tree Forest on SAR Image Data. ISPRS J. Photogramm. Remote Sens. 2012, 68, 135–143. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A Comparison of Three Methods for Automatic Tree Crown Detection and Delineation from High Spatial Resolution Imagery. Int. J. Remote Sens. 2011, 32, 3625–3647. [Google Scholar] [CrossRef]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy Assessment Measures for Object-Based Image Segmentation Goodness. Available online: https://www.ingentaconnect.com/content/asprs/pers/2010/00000076/00000003/art00004# (accessed on 24 March 2020).
- Persello, C.; Bruzzone, L. A Novel Protocol for Accuracy Assessment in Classification of Very High Resolution Images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1232–1244. [Google Scholar] [CrossRef]










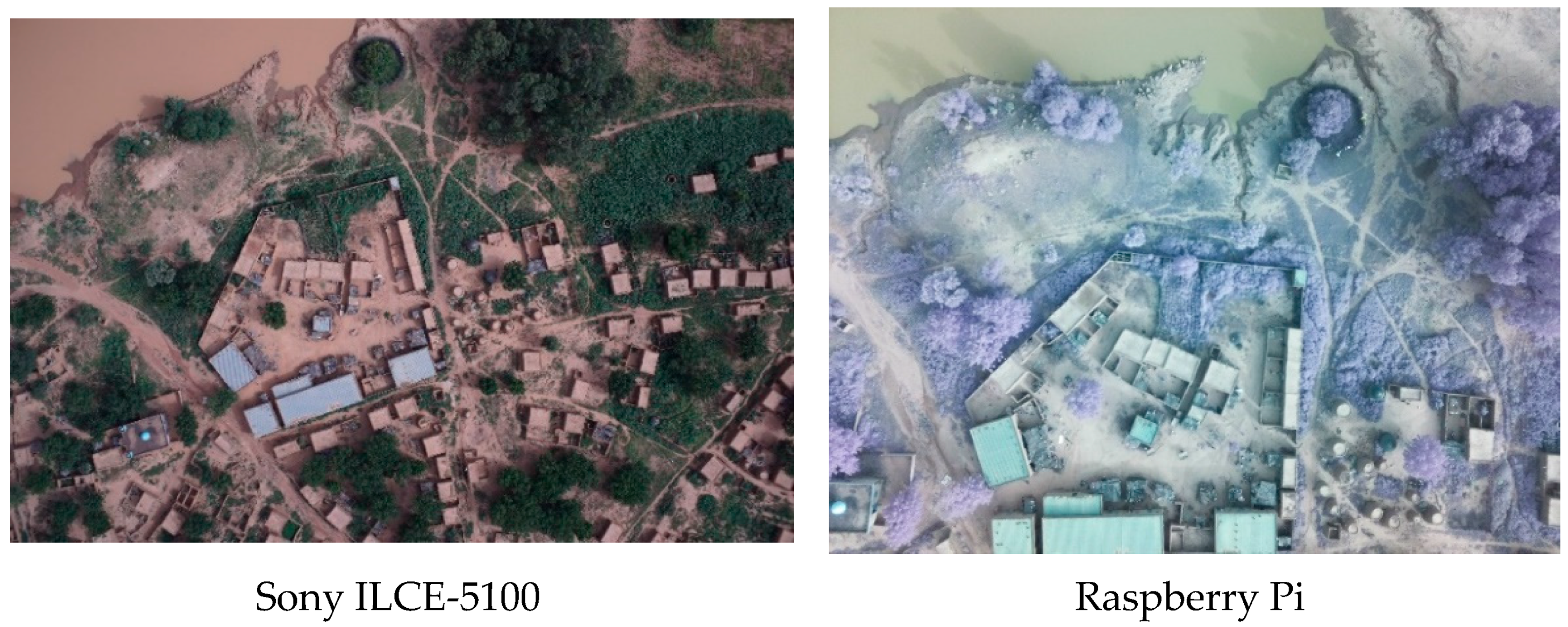
| Characteristics | Sony ILCE-5100 | Raspberry PI |
|---|---|---|
| Resolution | 23.3 MP | 5 MP |
| Band sensor | RGB | RGBN |
| ISO settings | 1/125 | 1/100 |
| Shutter frequency | Automatically set by the navigation software | 1 Hz |
| Lateral overlap | 70% | 70% |
| Longitudinal overlap | 60% | 60% |
| Number of flights | 1 | 2 |
| Average duration of flights | 30 min | 30 min |
| Height of flight from the ground | 280 m | 130 m |
| GSD | 3.9 cm/pixel | 6.1 cm/pixel |
| Errors (cm) | GCPs | CPs | ||
|---|---|---|---|---|
| Sony ILCE RGB | Raspberry RGN | Sony ILCE RGB | Raspberry RGN | |
| X error-easting | 3.52 | 5.40 | 3.75 | 5.41 |
| Y error-northing | 3.77 | 5.05 | 3.81 | 6.54 |
| Z error-altitude | 3.79 | 2.93 | 7.90 | 3.03 |
| Total error | 6.40 | 7.95 | 5.67 | 9.02 |
| Parameter | Value |
|---|---|
| Maximum degree angle [degree] | 1.5 |
| Maximum distance [meters] | 25 |
| Cell size [meters] | 30 |
| No. Samples | Wetland | Water | Grassland | Agricultural | Trees | Sandy Soil | Clustered Dark Areas | Gullies | Metal Roofed Houses | Brick Roofed Houses |
|---|---|---|---|---|---|---|---|---|---|---|
| Training | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 54 | 39 | 100 |
| Test | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 54 | 39 | 100 |
| Visual Validation | No. Objects |
|---|---|
| No. References | 133 |
| No. Segmented | 185 |
| Matches | 112 |
| Omission through under-segmentation | 7 |
| Commission through over-segmentation | 14 |
| Producer’s accuracy | 0.842 |
| User’s accuracy | 0.605 |
| F1 Score | 0.704 |
| Over Segmentation Index * | Under Segmentation Index * | D * | Jaccard Index | |
|---|---|---|---|---|
| Average | 0.063 | 0.122 | 0.113 | 0.830 |
| Min | 0.000 | 0.002 | 0.009 | 0.181 |
| Max | 0.473 | 0.786 | 0.560 | 1.000 |
| Median | 0.032 | 0.063 | 0.069 | 0.882 |
| Metric | RMSE | Average Value | Percentage over the Total |
|---|---|---|---|
| Area [m2] | 2.289 | 40.594 | 6% |
| Perimeter [m] | 4.368 | 24.778 | 18% |
| Wetland | Water | Grassland | Agricultural | Trees | Sandy Soil | Clustered Dark Areas | Gullies | Metal Roofs Houses | Bricks Roofs Houses | OA | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| PA | 0.926 | 1.000 | 0.966 | 0.933 | 0.971 | 0.912 | 0.956 | 0.902 | 0.978 | 0.923 | 0.945 |
| UA | 1.000 | 0.980 | 0.850 | 0.970 | 0.980 | 0.930 | 0.869 | 0.937 | 1.000 | 0.960 | |
| F1 | 0.962 | 0.990 | 0.904 | 0.951 | 0.975 | 0.921 | 0.910 | 0.919 | 0.989 | 0.941 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belcore, E.; Piras, M.; Pezzoli, A. Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping. Sensors 2022, 22, 5622. https://doi.org/10.3390/s22155622
Belcore E, Piras M, Pezzoli A. Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping. Sensors. 2022; 22(15):5622. https://doi.org/10.3390/s22155622
Chicago/Turabian StyleBelcore, Elena, Marco Piras, and Alessandro Pezzoli. 2022. "Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping" Sensors 22, no. 15: 5622. https://doi.org/10.3390/s22155622
APA StyleBelcore, E., Piras, M., & Pezzoli, A. (2022). Land Cover Classification from Very High-Resolution UAS Data for Flood Risk Mapping. Sensors, 22(15), 5622. https://doi.org/10.3390/s22155622