
Crack Localization in Operating Rotors Based on Multivariate Higher Order Dynamic Mode Decomposition





Abstract
:1. Introduction
- (1)
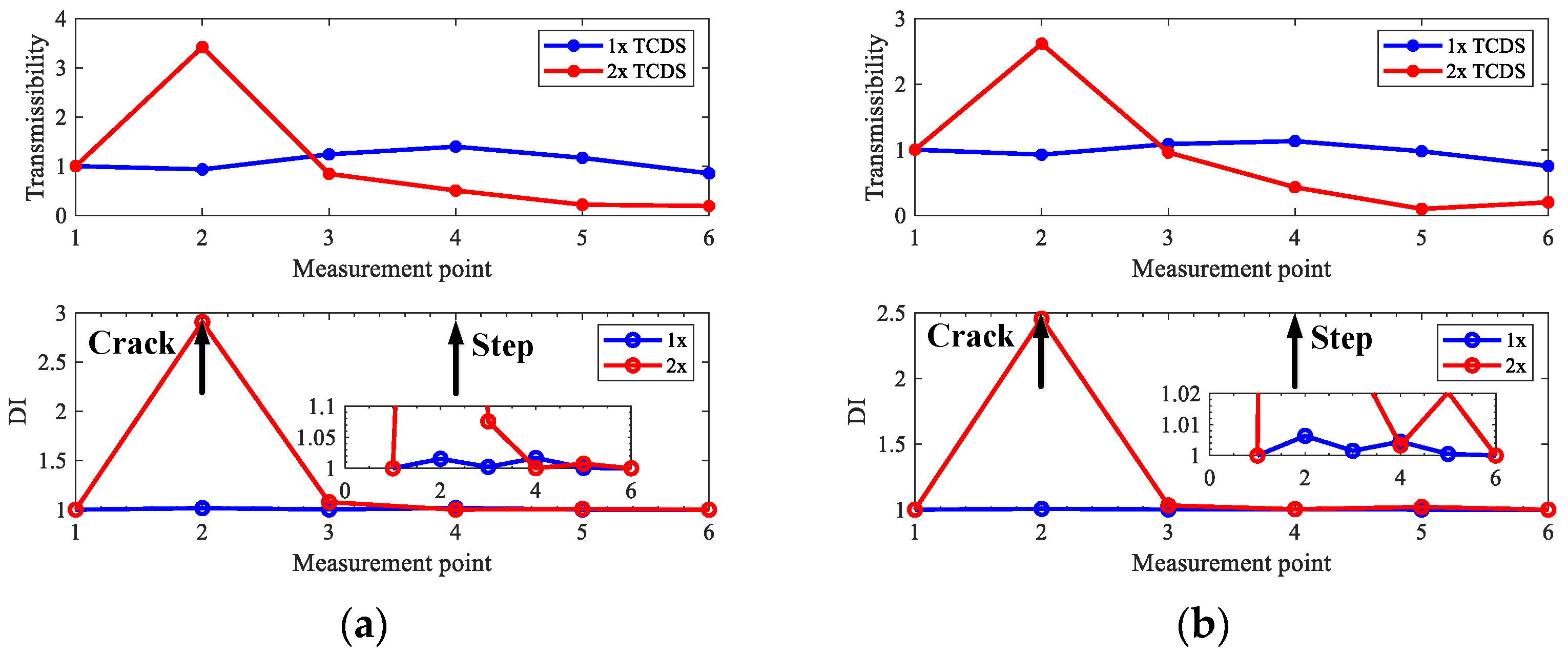
- A novel output-only crack localization method is proposed for operating rotors based on super-harmonic transmissibility characteristic deflection shapes derived damage index under the interference of commonly existing steps and misalignment and is validated numerically and experimentally.
- (2)
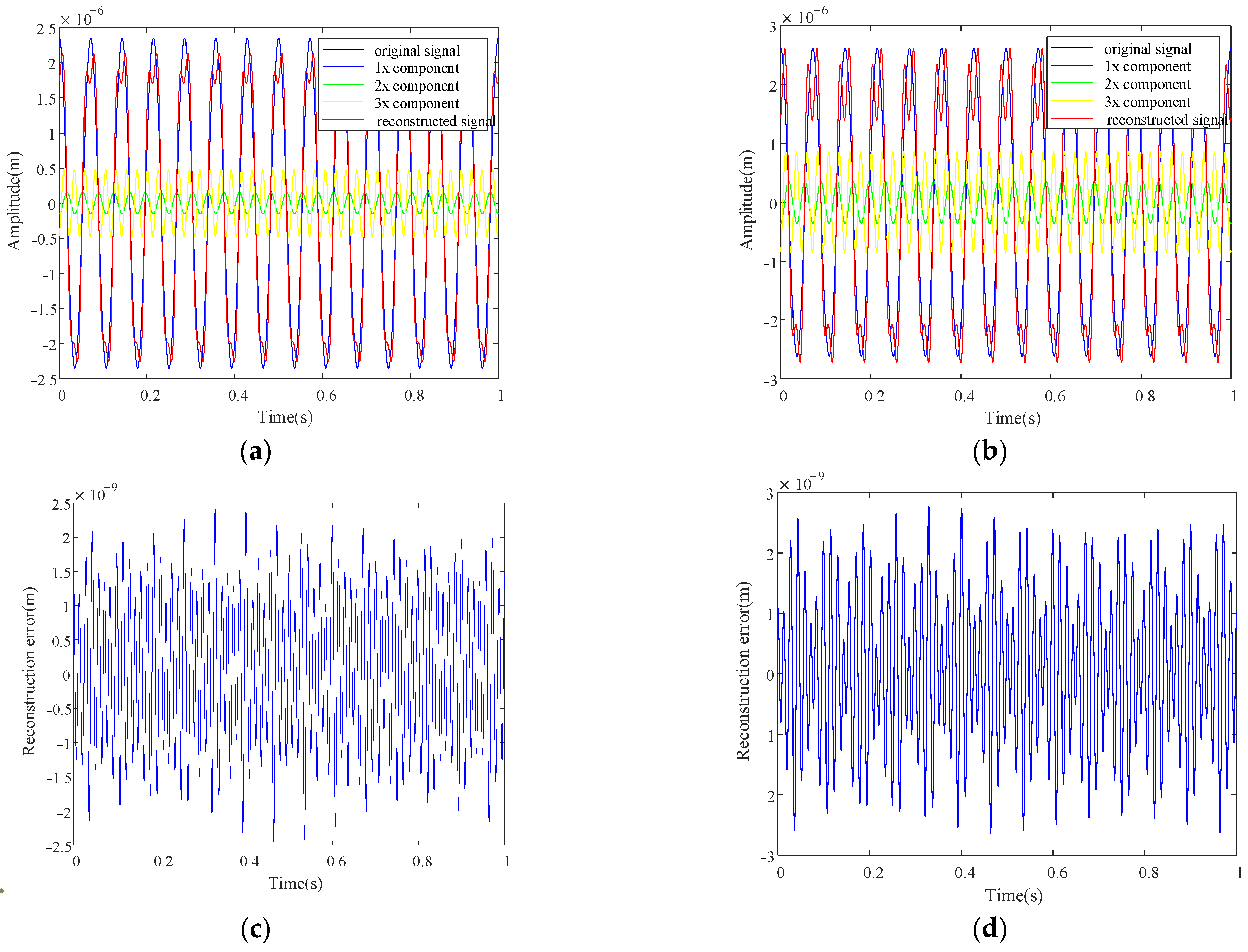
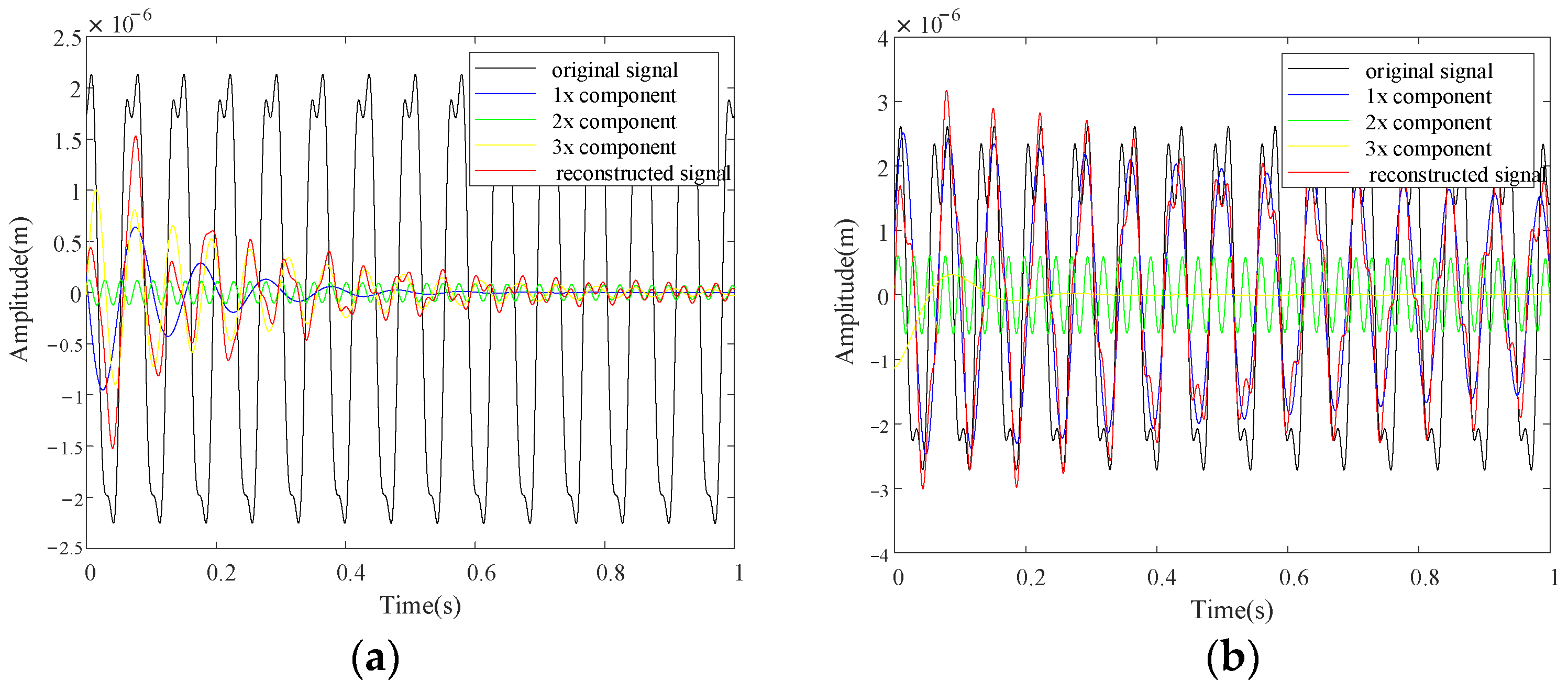
- An improved HODMD algorithm is developed to enhance the noise-robust performance by casting the total least square method into standard HODMD and adaptively selecting key parameters by optimizing the super-harmonic frequency vector.
- (3)
- The proposed method provides an alternative way to realize multivariate signals’ simultaneous decomposition and reconstruction, which would be very promising in many fields, such as operational modal analysis and structural health monitoring.
- (4)
- Last but not least, it is a significant attempt to extend the application of the DMD-like method to damage identification of rotating equipment.
2. Theory
2.1. HODMD
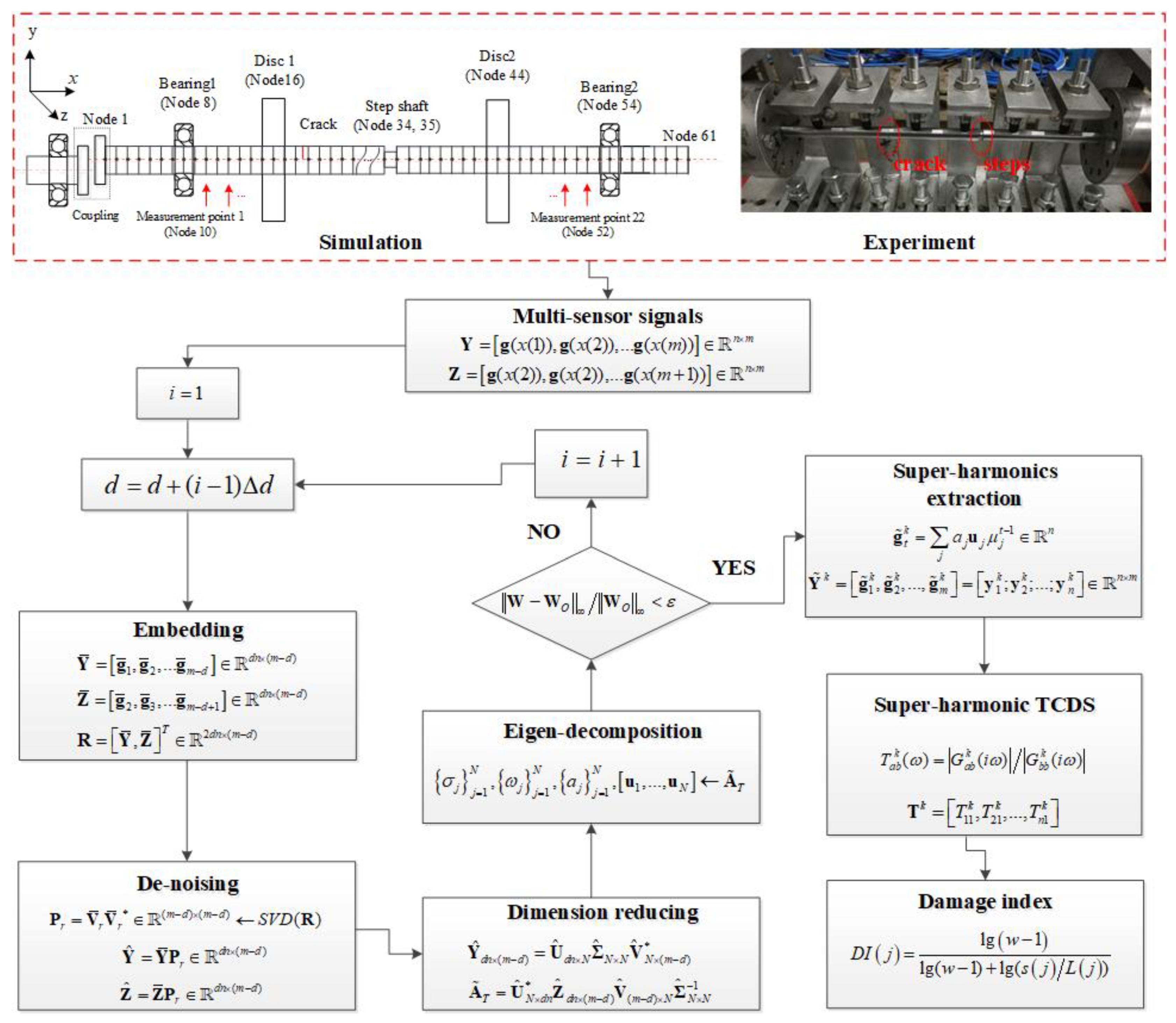
2.2. Enhanced HODMD Based Crack Localization Method
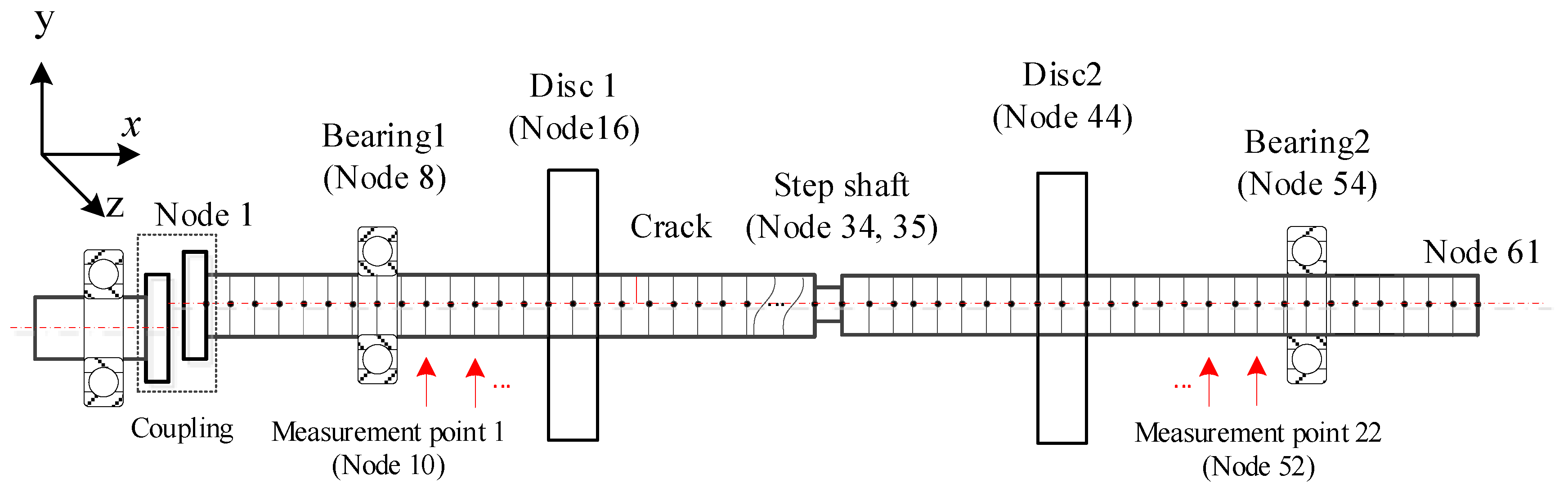
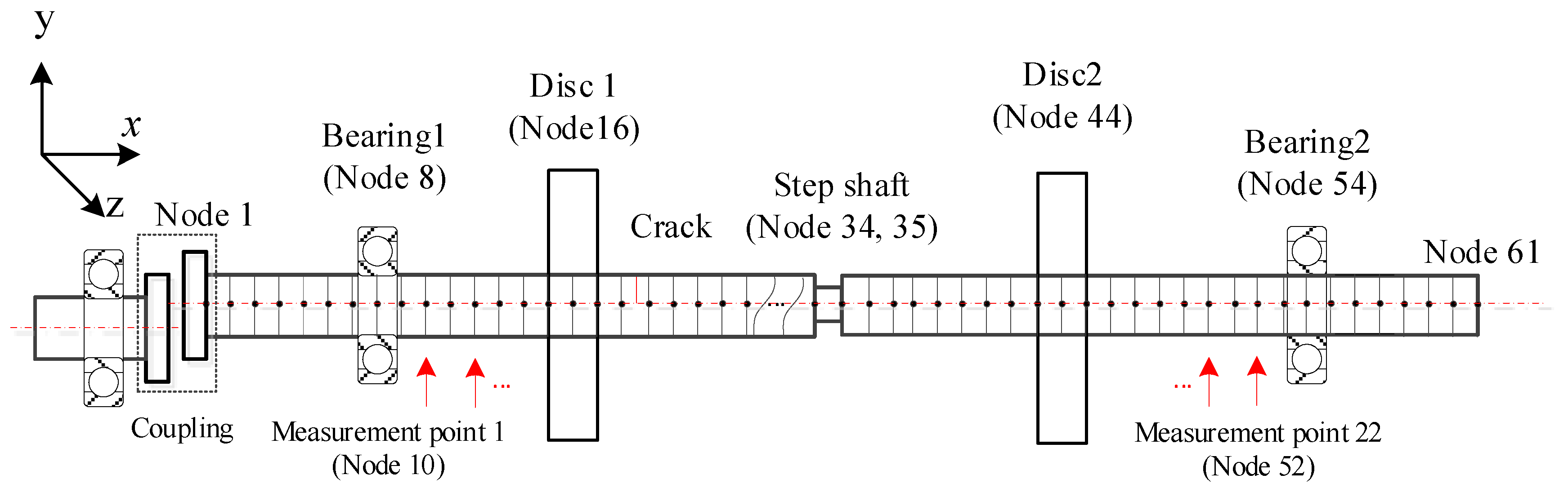
3. Numerical Investigation
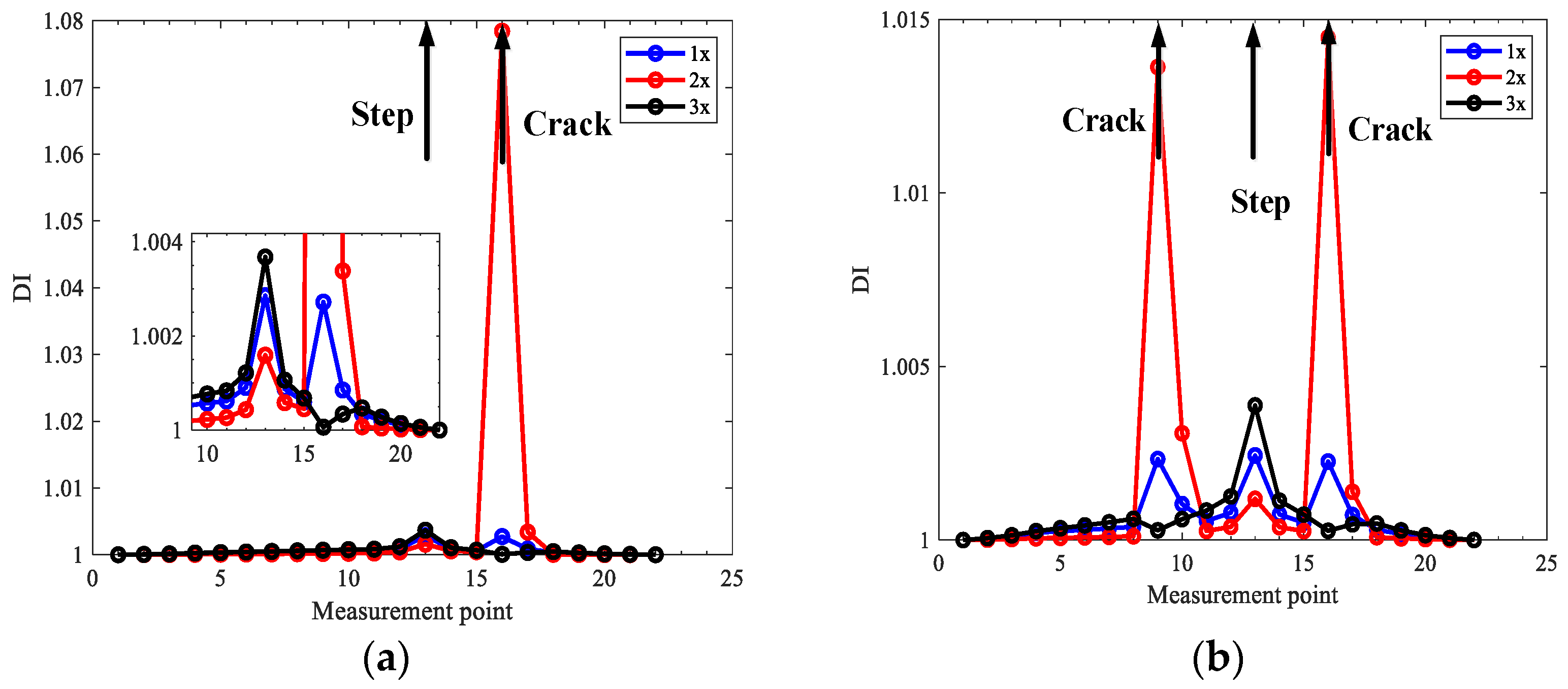
3.1. Localization Results for Simulations
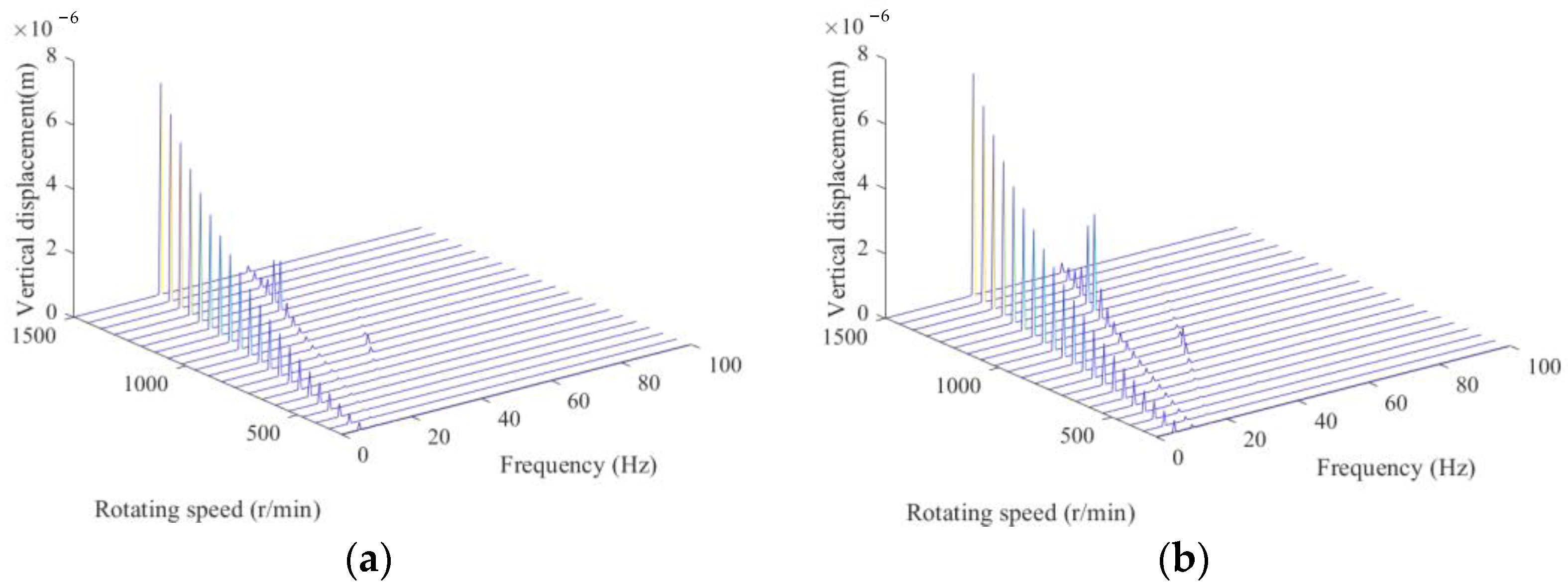
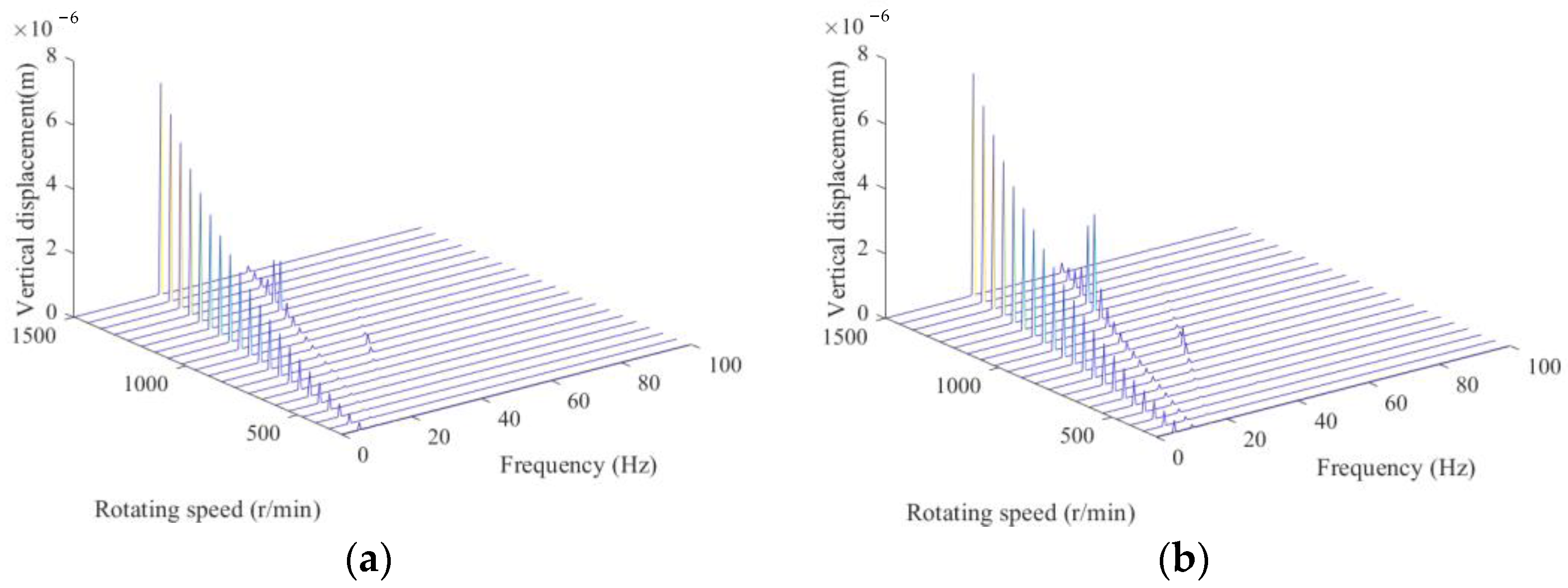
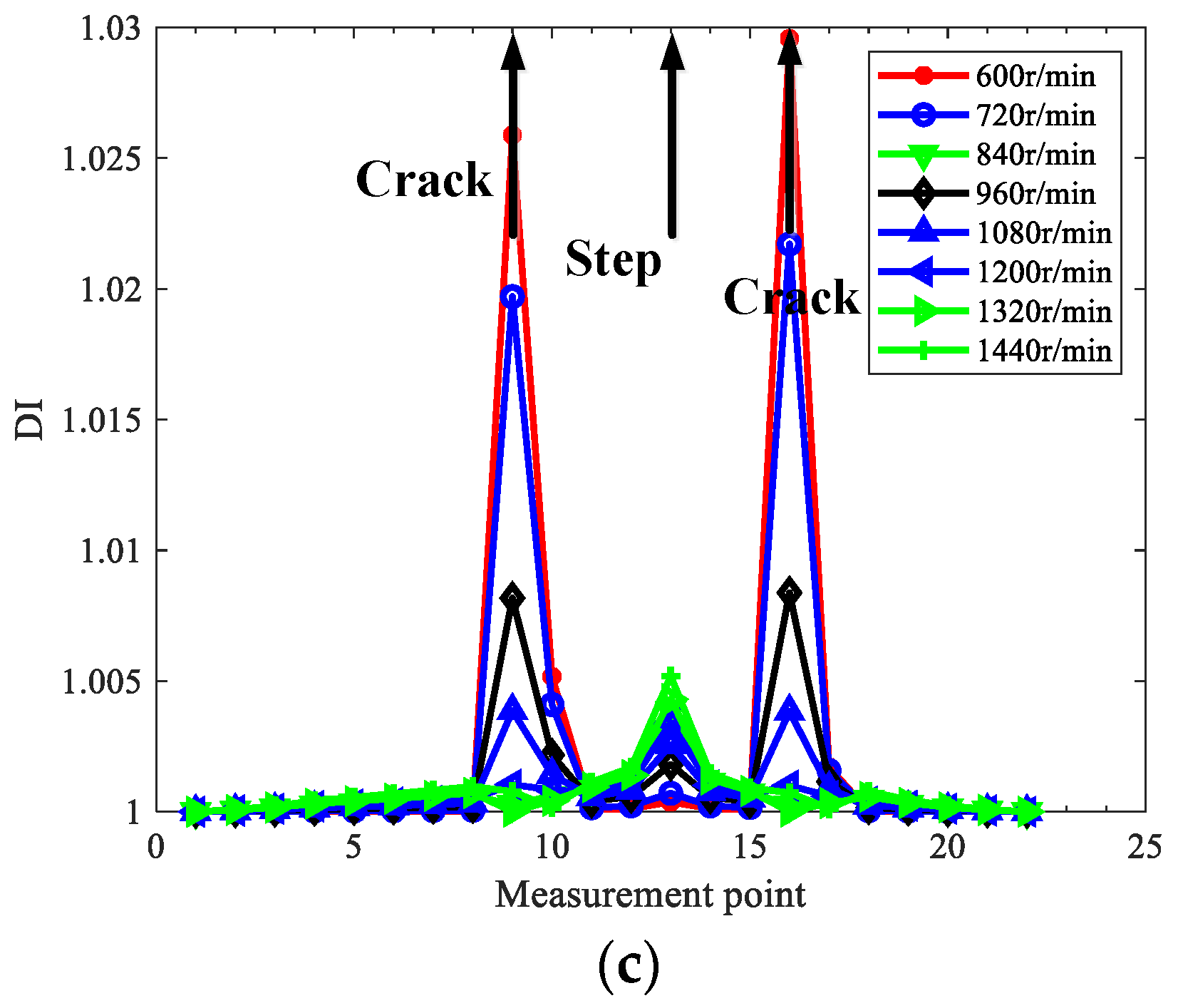
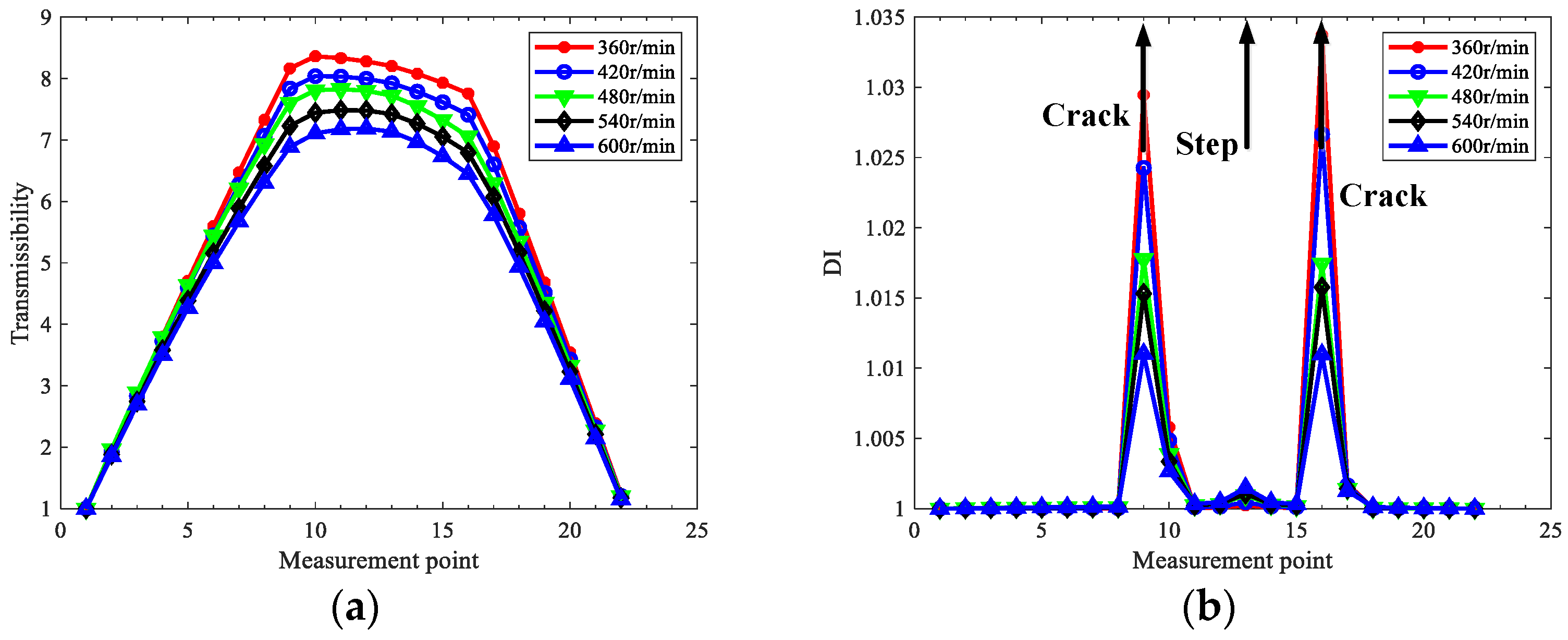
3.2. Effects of Rotating Speed
3.3. Crack Localization for Misaligned Rotors
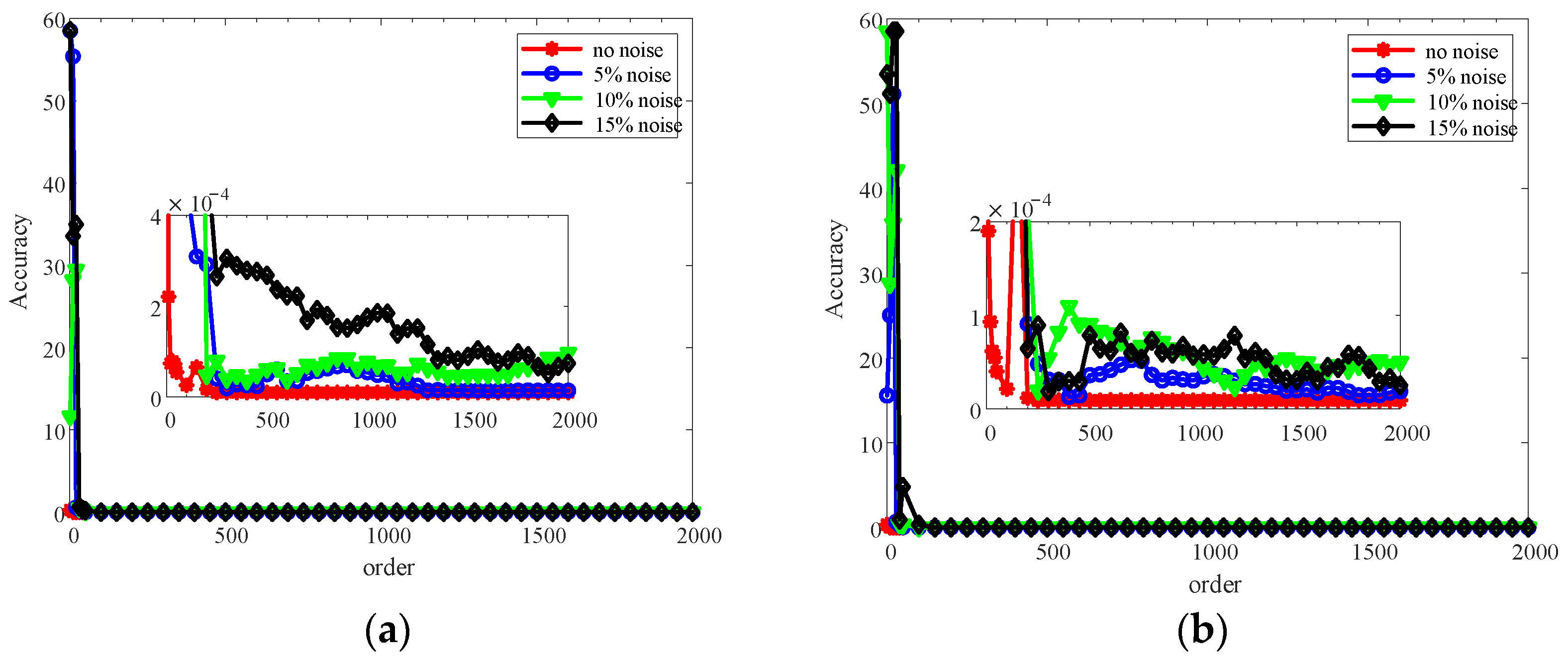
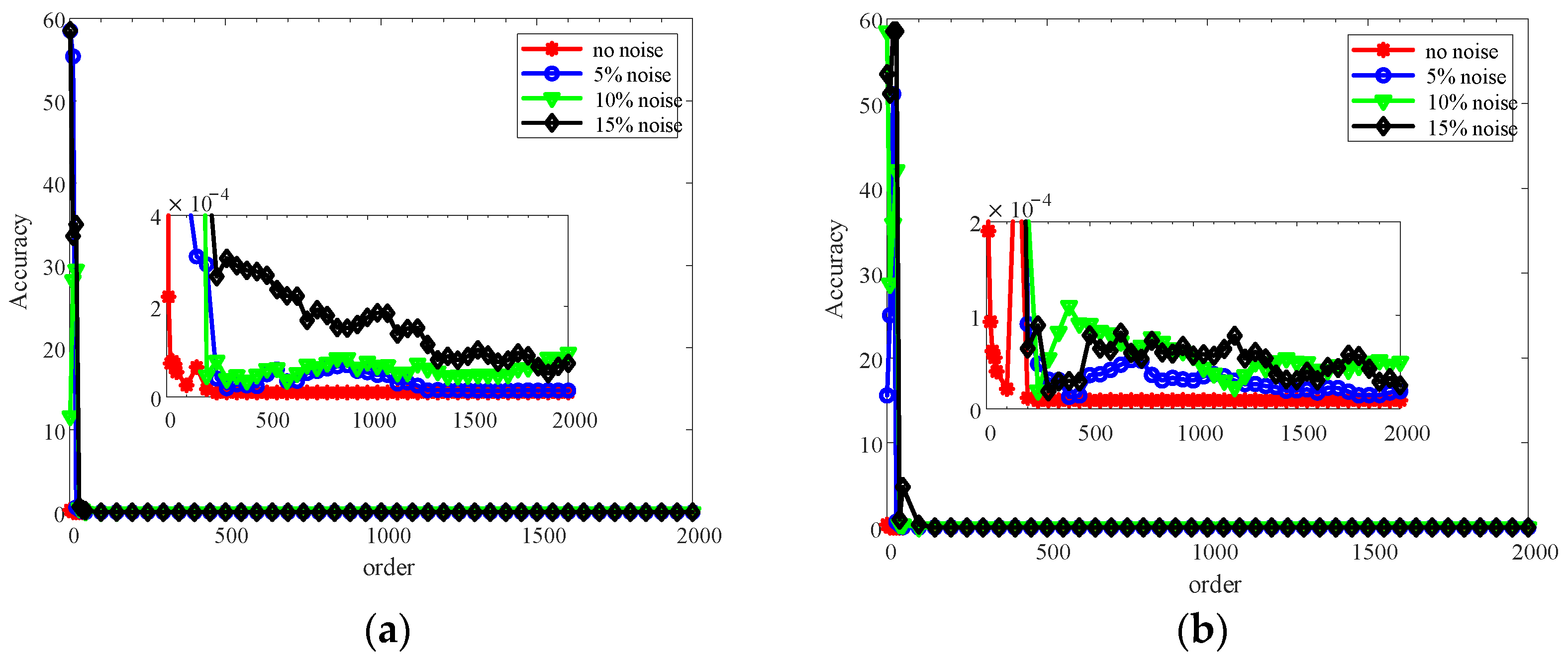
3.4. Effects of Signal Noise
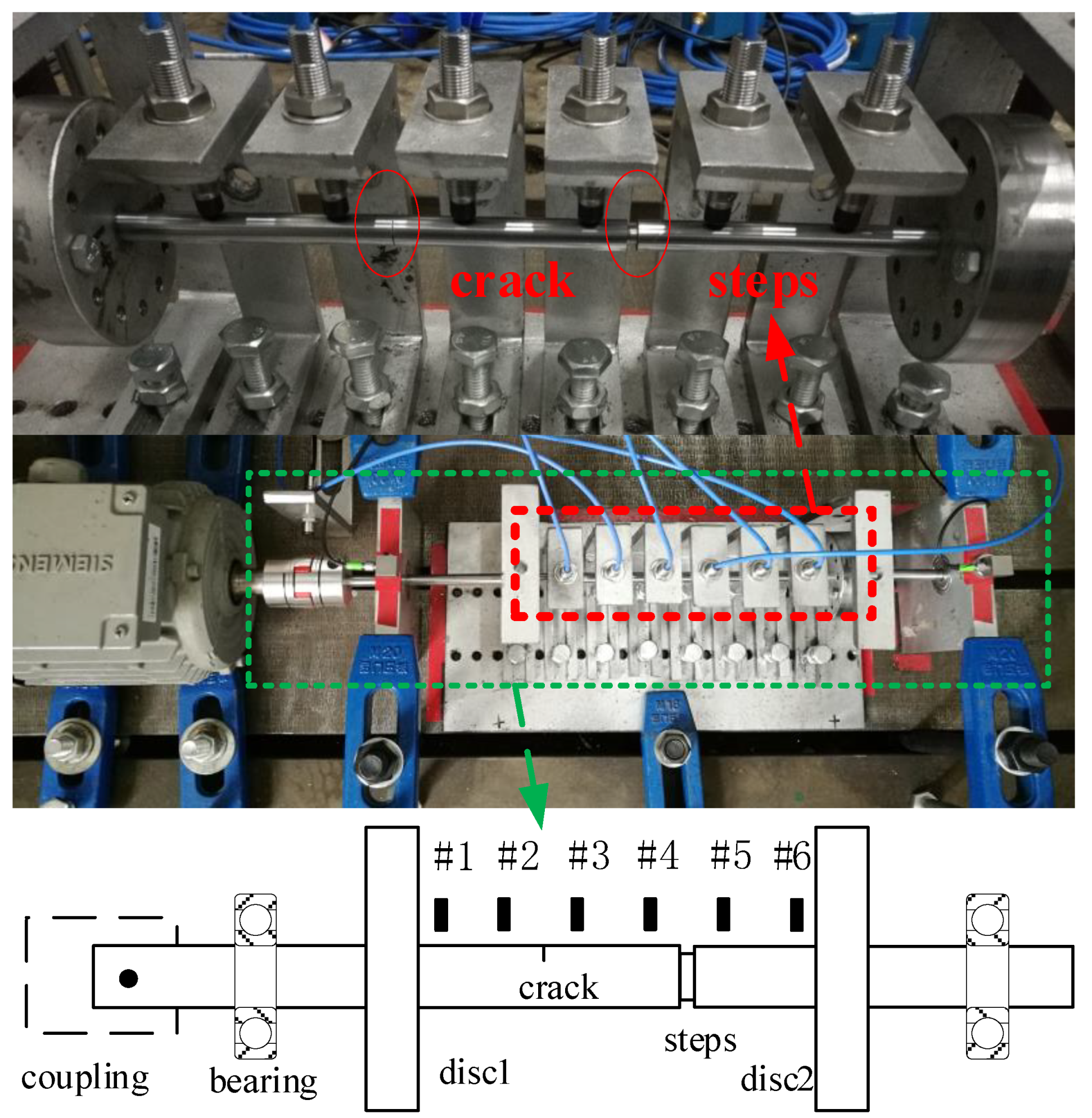
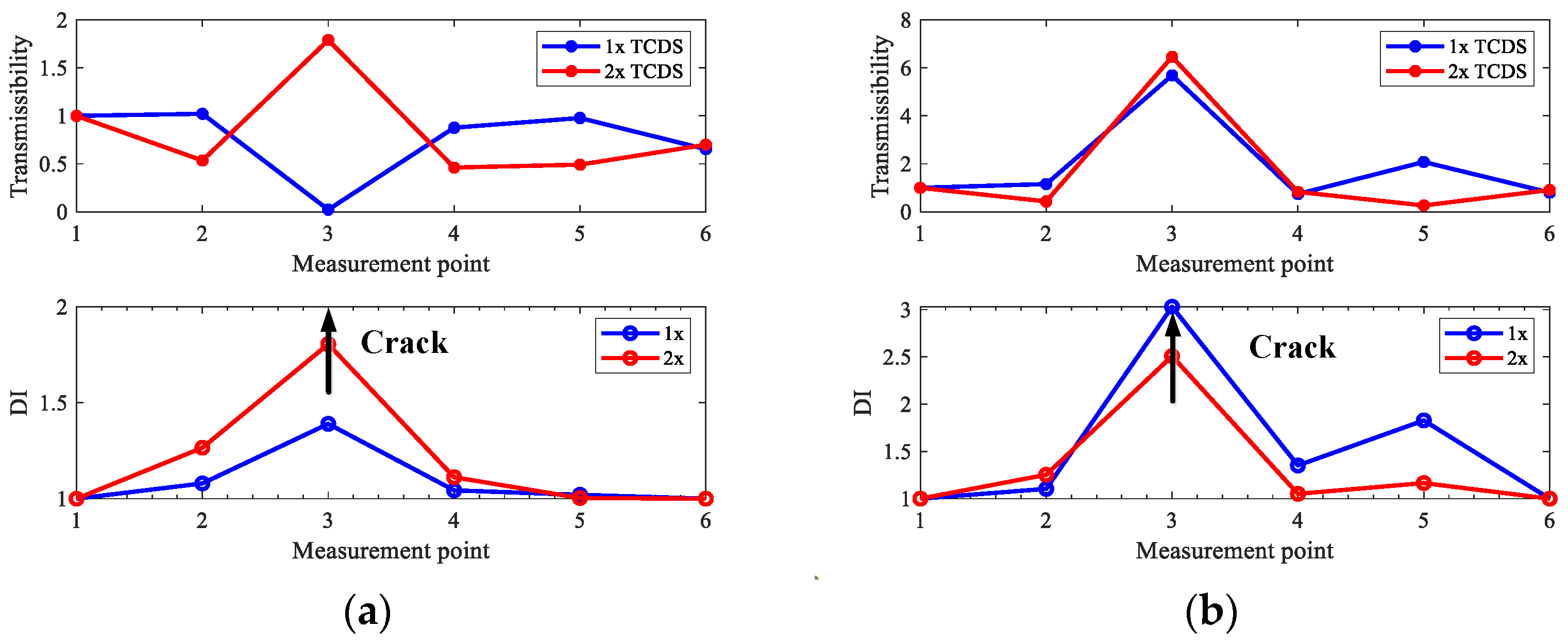
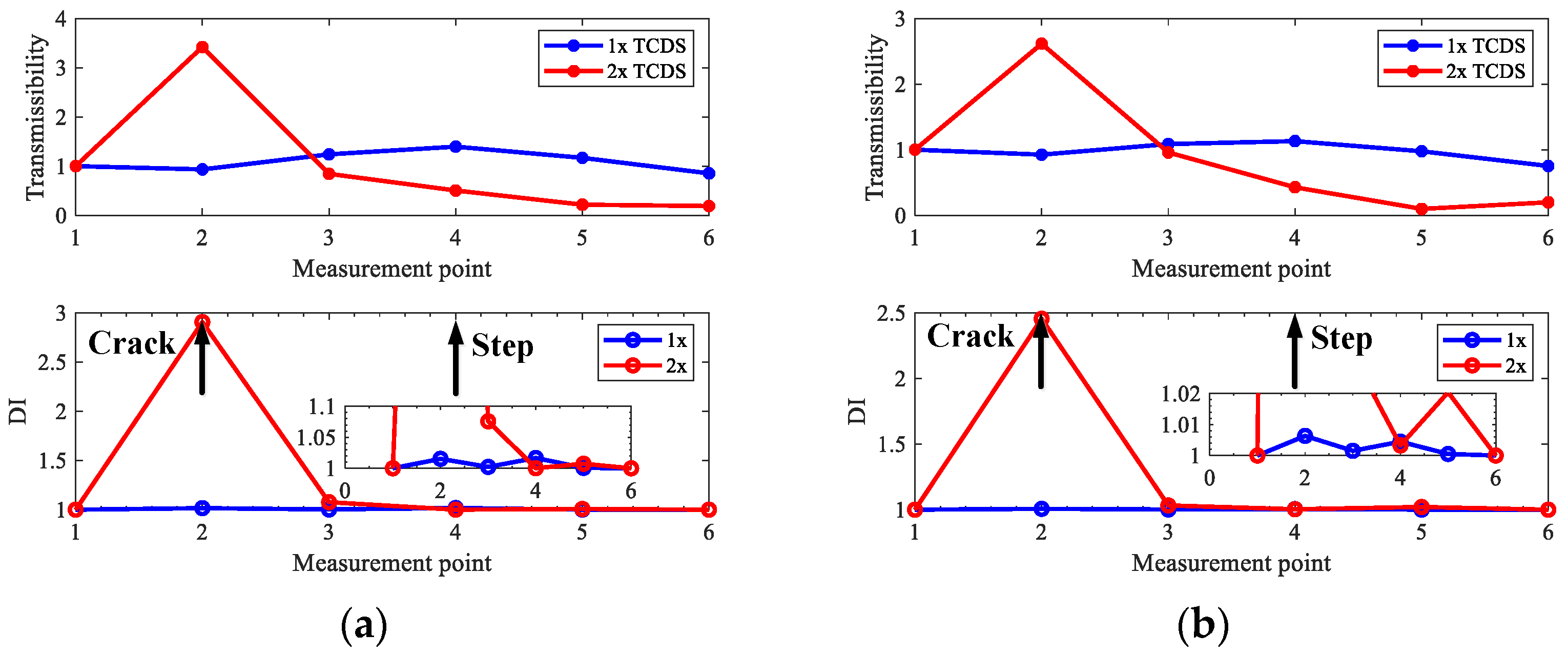
4. Experimental Validation
5. Discussion
6. Conclusions
- (1)
- The proposed crack localization method is available for operating rotors with multiple cracks and has been validated by numerical and experimental investigation, which is output-only, baseline-free, and noise-robust, and the interferences from the commonly existing steps and misalignment in rotors can be eliminated.
- (2)
- By casting the total least square method into standard HODMD and adaptively selecting the order parameter of Koopman approximation by optimizing the super-harmonic frequency vector, the improved HODMD method can deal with the multivariate noise-contaminated signals from multiple measurement points simultaneously. In view of the characteristics of the method, it provides an alternative way for multivariate signal processing.
- (3)
- Proper selection of rotating speed for crack localization can help to eliminate the interferences of steps in rotors. The main selection principle is to make super-harmonic components away from the critical speed, and lower speeds perform better.
- (4)
- The order parameter in the proposed method is important for the accuracy of decomposition. Higher orders seem better for accuracy, but not absolutely, and the efficiency will be lower; hence, the optimal order is demanded.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, Z.; Dong, D.; Cao, S.; Ouyang, H.; Hua, C. Multicrack Localization in Rotors Based on Proper Orthogonal Decomposition Using Fractal Dimension and Gapped Smoothing Method. Shock Vib. 2016, 2016, 2375859. [Google Scholar] [CrossRef]
- Zhang, C.; Li, B.; Yang, Z.; Xiao, W.; He, Z. Crack location identification of rotating rotor systems using operating deflection shape data. Sci. China Technol. Sci. 2013, 56, 1723–1732. [Google Scholar] [CrossRef]
- Singh, S.K.; Tiwari, R. Detection and localization of multiple cracks in a stepped shaft. Fatigue Fract. Eng. M 2013, 36, 85–91. [Google Scholar] [CrossRef]
- Katunin, A.; Dragan, K.; Dziendzikowski, M. Damage identification in aircraft composite structures: A case study using various non-destructive testing techniques. Compos. Struct. 2015, 117, 1–9. [Google Scholar] [CrossRef]
- Nigam, R.; Singh, S.K. Crack detection in a beam using wavelet transform and photographic measurements. Structures 2020, 25, 436–447. [Google Scholar] [CrossRef]
- Cao, M.; Xu, W.; Ren, W.; Ostachowicz, W.; Sha, G.; Pan, L. A concept of complex-wavelet modal curvature for detecting multiple cracks in beams under noisy conditions. Mech. Syst. Signal. Pr. 2016, 76, 555–575. [Google Scholar] [CrossRef]
- Wu, Q.; Guo, S.; Li, X.; Gao, G. Crack diagnosis method for a cantilevered beam structure based on modal parameters. Meas. Sci. Technol. 2020, 31, 035001. [Google Scholar] [CrossRef]
- Katunin, A.; Lopes, H.; Dos Santos, J.V.A. Identification of multiple damage using modal rotation obtained with shearography and undecimated wavelet transform. Mech. Syst. Signal. Pr. 2019, 116, 725–740. [Google Scholar] [CrossRef]
- Cao, S.; Ouyang, H. Robust multi-damage localisation using common eigenvector analysis and covariance matrix changes. Mech. Syst. Signal. Pr. 2018, 111, 663–677. [Google Scholar] [CrossRef]
- Chen, D.M.; Xu, Y.F.; Zhu, W.D. A Comprehensive Study on Detection of Hidden Delamination Damage in a Composite Plate Using Curvatures of Operating Deflection Shapes. J. Nondestruct. Eval. 2019, 38, 38–54. [Google Scholar] [CrossRef]
- Cao, X.; Rembe, C. Non-Contact Damage Detection under Operational Conditions with Multipoint Laservibrometry. Sensors 2020, 20, 732. [Google Scholar] [CrossRef] [PubMed]
- Saravanan, K.; Sekhar, A.S. Crack detection in a rotor by operational deflection shape and kurtosis using laser vibrometer measurements. J. Vib. Control. 2012, 19, 1227–1239. [Google Scholar] [CrossRef]
- Babu, T.R.; Sekhar, A.S. Detection of two cracks in a rotor-bearing system using amplitude deviation curve. J. Sound Vib. 2008, 314, 457–464. [Google Scholar] [CrossRef]
- Prawin, J.; Rao, A.R.M. A method for detecting damage-induced nonlinearity in structures using weighting function augmented curvature approach. Struct. Health Monit. 2018, 18, 147592171878880. [Google Scholar] [CrossRef]
- Broda, D.; Pieczonka, L.; Hiwarkar, V.; Staszewski, W.J.; Silberschmidt, V.V. Generation of higher harmonics in longitudinal vibration of beams with breathing cracks. J. Sound Vib. 2016, 381, 206–219. [Google Scholar] [CrossRef]
- Lu, Z.; Dong, D.; Ouyang, H.; Cao, S.; Hua, C. Localization of breathing cracks in stepped rotors using super-harmonic characteristic deflection shapes based on singular value decomposition in frequency domain. Fatigue Fract. Eng. M 2017, 40, 1825–1837. [Google Scholar] [CrossRef]
- Lu, Z.; Cao, S.; Ouyang, H.; Ruan, R.; Lv, Y. Crack localization in stepped rotors based on Bayesian fusion of multi-scale super-harmonic characteristic deflection shapes. Fatigue Fract. Eng. M 2020, 43, 2200–2213. [Google Scholar] [CrossRef]
- Lu, Z.; Cao, S.; Yuan, R.; Lv, Y. Baseline-Free Adaptive Crack Localization for Operating Stepped Rotors Based on Multiscale Data Fusion. Sensors 2020, 20, 5693. [Google Scholar] [CrossRef]
- Bovsunovsky, A.; Surace, C. Non-linearities in the vibrations of elastic structures with a closing crack: A state of the art review. Mech. Syst. Signal. Pr. 2015, 62, 129–148. [Google Scholar] [CrossRef]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Peng, Z.; Li, J.; Hao, H. Data driven structural damage assessment using phase space embedding and Koopman operator under stochastic excitations. Eng. Struct. 2022, 255, 113906. [Google Scholar] [CrossRef]
- Saito, A.; Kuno, T. Data-driven experimental modal analysis by Dynamic Mode Decomposition. J. Sound Vib. 2020, 481, 115434. [Google Scholar] [CrossRef]
- Hemati, M.S.; Rowley, C.W.; Deem, E.A.; Cattafesta, L.N. De-biasing the dynamic mode decomposition for applied Koopman spectral analysis of noisy datasets. Comp. Fluid Dyn. 2017, 31, 349–368. [Google Scholar] [CrossRef]
- Dang, Z.; Lv, Y.; Li, Y.; Wei, G. A Fault Diagnosis Method for One-Dimensional Vibration Signal Based on Multiresolution tlsDMD and Approximate Entropy. Shock Vib. 2019, 2019, 3262818. [Google Scholar] [CrossRef]
- Cheng, C.; Ding, J.; Zhang, Y. A Koopman operator approach for machinery health monitoring and prediction with noisy and low-dimensional industrial time series. Neurocomputing 2020, 406, 204–214. [Google Scholar] [CrossRef]
- Le Clainche, S.; Vega, J.M. Higher Order Dynamic Mode Decomposition. Siam J. Appl Dyn Syst 2017, 16, 882–925. [Google Scholar] [CrossRef]
- Li, X.Z.; Yue, X.B.; Huang, W. Crack Localization Using Transmissibility of Operational Deflection Shape and Its Application in Cantilever Beam. J. Appl. Math. Phys. 2018, 6, 2352–2361. [Google Scholar] [CrossRef]
- Li, Q.; Liao, M.; Jing, X. Transmissibility function-based fault diagnosis methods for beam-like engineering structures: A review of theory and properties. Nonlinear Dynam. 2021, 106, 2131–2163. [Google Scholar] [CrossRef]
- Qiao, P.; Cao, M. Waveform fractal dimension for mode shape-based damage identification of beam-type structures. Int. J. Solids Struct. 2008, 45, 5946–5961. [Google Scholar] [CrossRef]
- Darpe, A.K.; Gupta, K.; Chawla, A. Coupled bending, longitudinal and torsional vibrations of a cracked rotor. J. Sound Vib. 2004, 269, 33–60. [Google Scholar] [CrossRef]
- Wang, N.; Jiang, D. Vibration response characteristics of a dual-rotor with unbalance-misalignment coupling faults: Theoretical analysis and experimental study. Mech. Mach. Theory 2018, 125, 207–219. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Cases | Crack 1 | Crack 2 | Stepped Shaft | Misalignment | ||
|---|---|---|---|---|---|---|
| Position (Measurement Point) | Depth (mm) | Position (Measurement Point) | Depth (mm) | Position (Measurement Point) | ||
| 1 | 15–16 | 1.5 | -- | -- | 12–13 | -- |
| 2 | 8–9 | 1.5 | 15–16 | 1.5 | 12–13 | -- |
| 3 | 15–16 | 1.5 | -- | -- | 12–13 | Parallel |
| 4 | 8–9 | 1.5 | 15–16 | 1.5 | 12–13 | Parallel |
| Case | Crack Location (Measurement Point) | Crack Depth (mm) | Step Location (Measurement Point) |
|---|---|---|---|
| 1 | 3–4 | 1.57 | -- |
| 2 | 2–3 | 1.54 | 4–5 |
| 3 | 2–3 | 3.29 | 4–5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Li, F.; Cao, S.; Yuan, R.; Lv, Y. Crack Localization in Operating Rotors Based on Multivariate Higher Order Dynamic Mode Decomposition. Sensors 2022, 22, 6131. https://doi.org/10.3390/s22166131
Lu Z, Li F, Cao S, Yuan R, Lv Y. Crack Localization in Operating Rotors Based on Multivariate Higher Order Dynamic Mode Decomposition. Sensors. 2022; 22(16):6131. https://doi.org/10.3390/s22166131
Chicago/Turabian StyleLu, Zhiwen, Feng Li, Shancheng Cao, Rui Yuan, and Yong Lv. 2022. "Crack Localization in Operating Rotors Based on Multivariate Higher Order Dynamic Mode Decomposition" Sensors 22, no. 16: 6131. https://doi.org/10.3390/s22166131
APA StyleLu, Z., Li, F., Cao, S., Yuan, R., & Lv, Y. (2022). Crack Localization in Operating Rotors Based on Multivariate Higher Order Dynamic Mode Decomposition. Sensors, 22(16), 6131. https://doi.org/10.3390/s22166131