
Ball Screw Fault Diagnosis Based on Wavelet Convolution Transfer Learning



Abstract
:1. Introduction
2. Theoretical Background
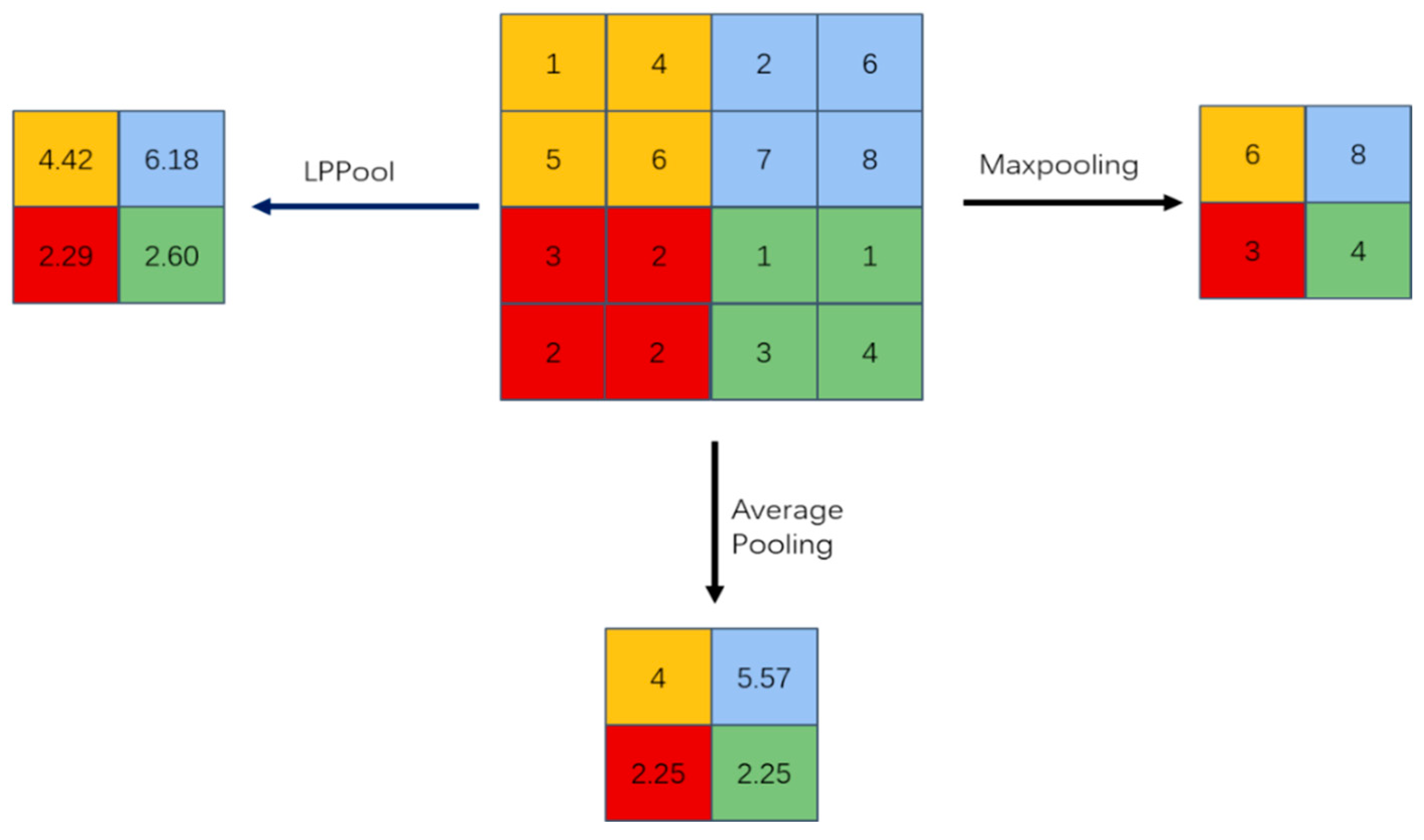
2.1. Wavelet Convolution Energy Pooling
2.2. AdaBN Algorithm
| Algorithm 1: AdaBN Algorithm |
| Input: all m samples x in test set t, scaling parameters and translation parameters of training set For the ith neuron of the neural network: Calculate the mean: Calculate variance: Calculate the output of the BN layer: end for |
2.3. Joint Distribution Adaptation (JDA) Feature Domain Adaptation
3. Fault Diagnosis Method Based on AdaCNN Model
3.1. A fault Diagnosis Knowledge Transfer Method between Different Working Conditions Based on AdaBN Algorithm
- Collect the vibration data under different loads at the ball screw nut seat, divide the sample source and target domains with the load as a variable, and divide the source domain samples into training set samples and test set samples according to a certain proportion.
- Build a convolutional neural network. In Figure 2, we show the structure of a convolutional neural network. The first convolutional layer is replaced with a wavelet convolutional layer, and the pooling layer is replaced with an energy pooling layer. The improved convolutional layer and pooling layers can improve the model’s ability to mine signal features. A batch normalization layer (BN) is added after the convolutional layer, and the training process adopts mini-batch learning. Batch normalization (BN) is to transform the input data distribution into a normal distribution with a mean equal to 0 and a variance equal to 1. The Adam optimization algorithm is used when the parameters are updated, which is beneficial for accelerating the training speed. Train and save the model parameters as Model 1, with the target domain sample training set.
- Fix the BN layer parameters of Model 1, use the source domain for training, only perform forward propagation during the training process, and save the model parameters as Model 2 after training. At this time, the role of the BN layer makes the source domain and the target domain similar in feature distribution, thereby improving the generalization ability of the model.
- Input the test set of target domain samples into Model 2 to verify the correctness of the network.
3.2. Fault Diagnosis Knowledge Transfer Method between Different Locations Based on Joint Distribution Adaptation (JDA)
- Under the same working conditions, the data collected at the nut seat of the ball screw (the target domain sample in the fault diagnosis knowledge transfer between different working conditions) are used as the source domain data.
- Build the convolutional neural network model. The structure of the convolutional neural network is shown in Figure 3. The first convolutional layer is replaced with a wavelet convolutional layer, and the pooling layer is replaced with an energy pooling layer.
- On the basis of Model 2, the JDA algorithm matching feature is added, and it is added to the optimization goal of the network. JDA calculates the domain difference through forward propagation, and backpropagation reduces the domain difference. In the training process, the model parameters are fine-tuned with the target domain dataset, and the BN layer parameters are fixed to make the feature distribution of the source domain and the target domain basically the same.
3.3. AdaCNN Model
4. Ball Screw Experimental Verification
4.1. Diagnostic Dataset Description
4.2. Transfer of Fault Diagnosis Knowledge between Different Working Conditions
4.3. Transfer of Fault Diagnosis Knowledge from Different Locations
5. Conclusions, Limitations, and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, W.; Lee, J.W.; Hong, M.; Nam, S.; Jeon, Y.; Lee, M. Failure Diagnosis System for a Ball-Screw by Using Vibration Signals. Shock. Vib. 2015, 2015, 435870. [Google Scholar] [CrossRef] [Green Version]
- Shan, P.; Lv, H.; Yu, L.; Ge, H.; Li, Y.; Gu, L. A multisensor data fusion method for ball screw fault diagnosis based on convolutional neural network with selected channels. IEEE Sens. J. 2020, 20, 7896–7905. [Google Scholar] [CrossRef]
- Yang, Q.; Li, X.; Wang, Y.; Ainapure, A.; Lee, J. Fault diagnosis of ball screw in industrial robots using non-stationary motor current signals. Procedia Manuf. 2020, 48, 1102–1108. [Google Scholar] [CrossRef]
- Lei, Z.; Wang, M.Z.; David, Z. LSDT: Latent Sparse Domain Transfer Learning for Visual Adaptation. IEEE Trans. Image Process. 2016, 25, 1177–1191. [Google Scholar]
- Deng, J.; Xu, X.; Zhang, Z. Universum Autoencoder-Based Domain Adaptation for Speech Emotion Recognition. IEEE Signal Process. Lett. 2017, 24, 500–504. [Google Scholar] [CrossRef]
- Li, W.; Duan, L.; Xu, D.; Tsang, I.W. Learning With Augmented Features for Supervised and Semi-Supervised Heterogeneous Domain Adaptation. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1134–1148. [Google Scholar] [CrossRef] [PubMed]
- Cao, P.; Zhang, S.; Tang, J. Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer Learning. IEEE Access 2018, 6, 26241–26253. [Google Scholar] [CrossRef]
- Moslem, A.; Xiang, L.; Jay, L. Intelligent ball screw fault diagnosis using a deep domain adaptation methodology. Mech. Mach. Theory 2020, 151, 103932. [Google Scholar]
- Tong, Z.; Li, W.; Zhang, B.; Zhang, M. Bearing Fault Diagnosis Based on Domain Adaptation Using Transferable Features under Different Working Conditions. Shock Vib. 2018, 2018, 6714520. [Google Scholar] [CrossRef]
- Zhang, B.; Li, W.; Tong, Z.; Zhang, M. Bearing fault diagnosis under varying working condition based on domain adaptation. In Proceedings of the 25th International Congress on Sound and Vibration (ICSV25), New York, NY, USA, 5–8 July 2017. [Google Scholar]
- Liao, M.; Liu, C.; Wang, C.; Yang, J. Research on a Rolling Bearing Fault Detection Method With Wavelet Convolution Deep Transfer Learning. IEEE Access 2021, 9, 45175–45188. [Google Scholar] [CrossRef]
- Li, Y.; Wang, N.; Shi, J.; Liu, J.; Hou, X. Revisiting Batch Normalization For Practical Domain Adaptation. arXiv preprint 2016, arXiv:1603.04779. [Google Scholar]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Li, Y.; Wang, N.; Shi, J.; Hou, X.; Liu, J. Adaptive Batch Normalization for practical domain adaptation. Pattern Recognit. 2018, 80, 109–117. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv preprint 2015, arXiv:1502.03167. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numbering | Layer | Nuclear Size | Activation Function | Output Size |
|---|---|---|---|---|
| 1 | WaveletConv1 | 1 × 27 × 55 | Relu | 8192 × 27 |
| 2 | Pooling1 | 16 × 1 | ||
| 3 | Conv2 | 27 × 27 × 55 | Relu | 512 × 27 |
| 4 | Dropout | |||
| 5 | Conv3 | 27 × 27 × 55 | Relu | 512 × 27 |
| 6 | Pooling2 | 16 × 27 | ||
| 7 | Conv4 | 27 × 27 × 55 | Relu | 32 × 27 |
| 8 | Dropout | |||
| 9 | Conv5 | 27 × 27 × 55 | Relu | 32 × 27 |
| 10 | Flatten | 864 × 1 | ||
| 11 | Full1 | 864 × 216 | Relu | 864 × 1 |
| 12 | Full2 | 216 × 64 | Relu | 64 × 1 |
| 13 | Full3 | 64 × 2 | Softmax | 2 × 1 |
| load | rotating speed | 300 r/min | 1200 r/min |
| position | train/test set | train/test set | |
| 0 kg | nut seat (work platform) | A1 | A3 |
| 15 kg | nut seat (work platform) | A2 | A4 |
| bearing housing | B1 | B2 |
| Accuracy | |
|---|---|
| AdaCNN | 100% |
| WDTL | 98.9% |
| Standard CNN | 98.5% |
| SVM | 75% |
| Accuracy | |
|---|---|
| AdaCNN | 95.32% |
| WDTL | 50% |
| Standard CNN | 93.48% |
| SVM | 75% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Liu, C.; Huang, L.; Duan, H. Ball Screw Fault Diagnosis Based on Wavelet Convolution Transfer Learning. Sensors 2022, 22, 6270. https://doi.org/10.3390/s22166270
Xie Y, Liu C, Huang L, Duan H. Ball Screw Fault Diagnosis Based on Wavelet Convolution Transfer Learning. Sensors. 2022; 22(16):6270. https://doi.org/10.3390/s22166270
Chicago/Turabian StyleXie, Yifan, Chang Liu, Liji Huang, and Hongchun Duan. 2022. "Ball Screw Fault Diagnosis Based on Wavelet Convolution Transfer Learning" Sensors 22, no. 16: 6270. https://doi.org/10.3390/s22166270