
Weak Fault Feature Extraction Method Based on Improved Stochastic Resonance
Abstract
:1. Introduction
2. Basic Theory
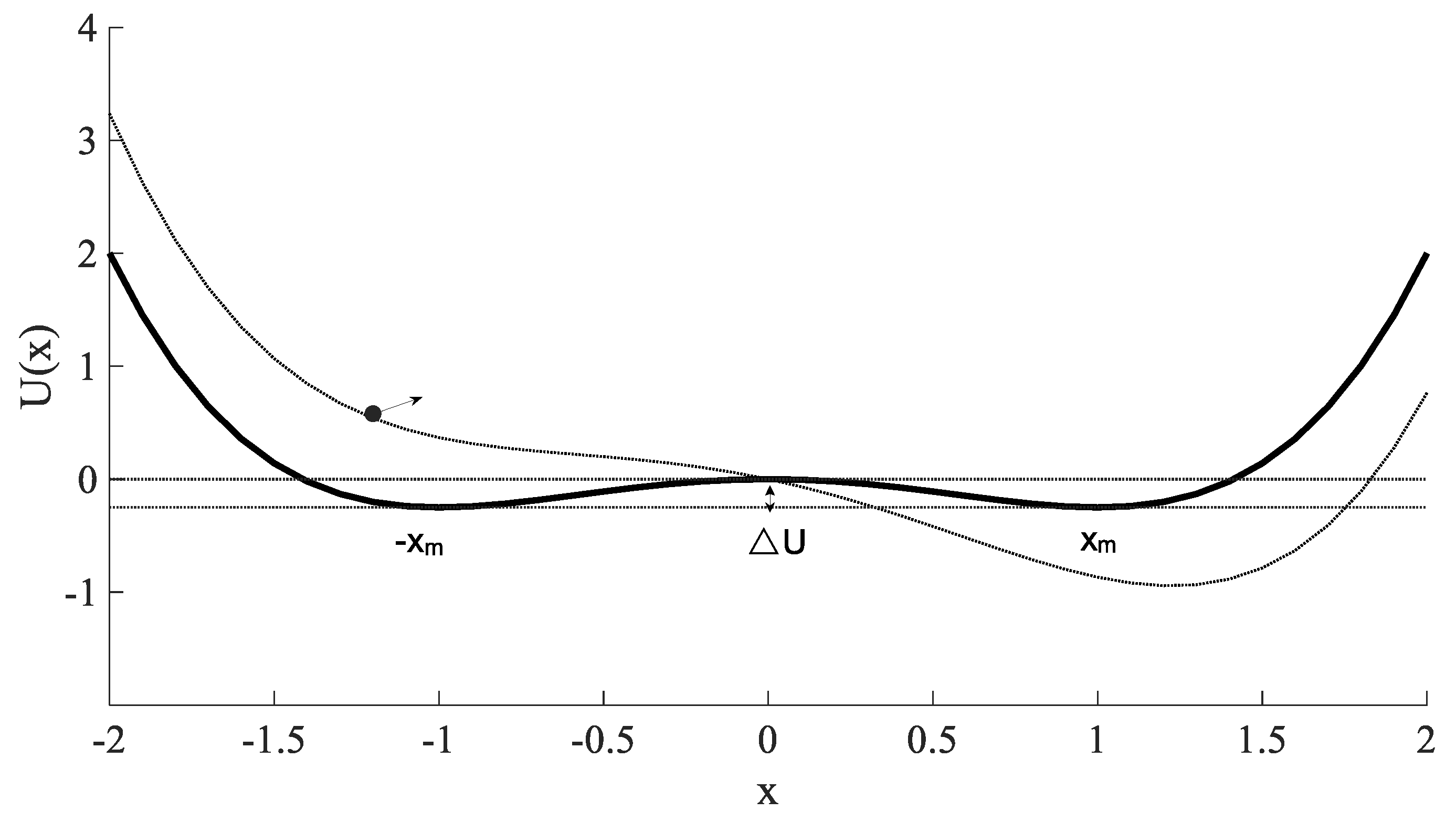
2.1. SR Theory Analysis
2.2. Second-Order General Scale Transformation SR
2.3. APSO Algorithm
3. Second-Order Amplitude-Frequency Re-Scaling Match SR Based on CEI
3.1. Second-Order Amplitude Frequency Re-Scaling SR
3.2. Parameter Matching Principle
- (1)
- determination of the range of R
- (2)
- determination of the range of
- (3)
- determination of the range of
3.3. CEI Based on BP Neural Network
3.3.1. Single Index Analysis
- (1)
- Power Spectrum Kurtosis (PSK)
- (2)
- Correlation Coefficient (CC)
- (3)
- Structural Similarity (SSIM)
- (4)
- Root Mean Square Error (RMSE)
- (5)
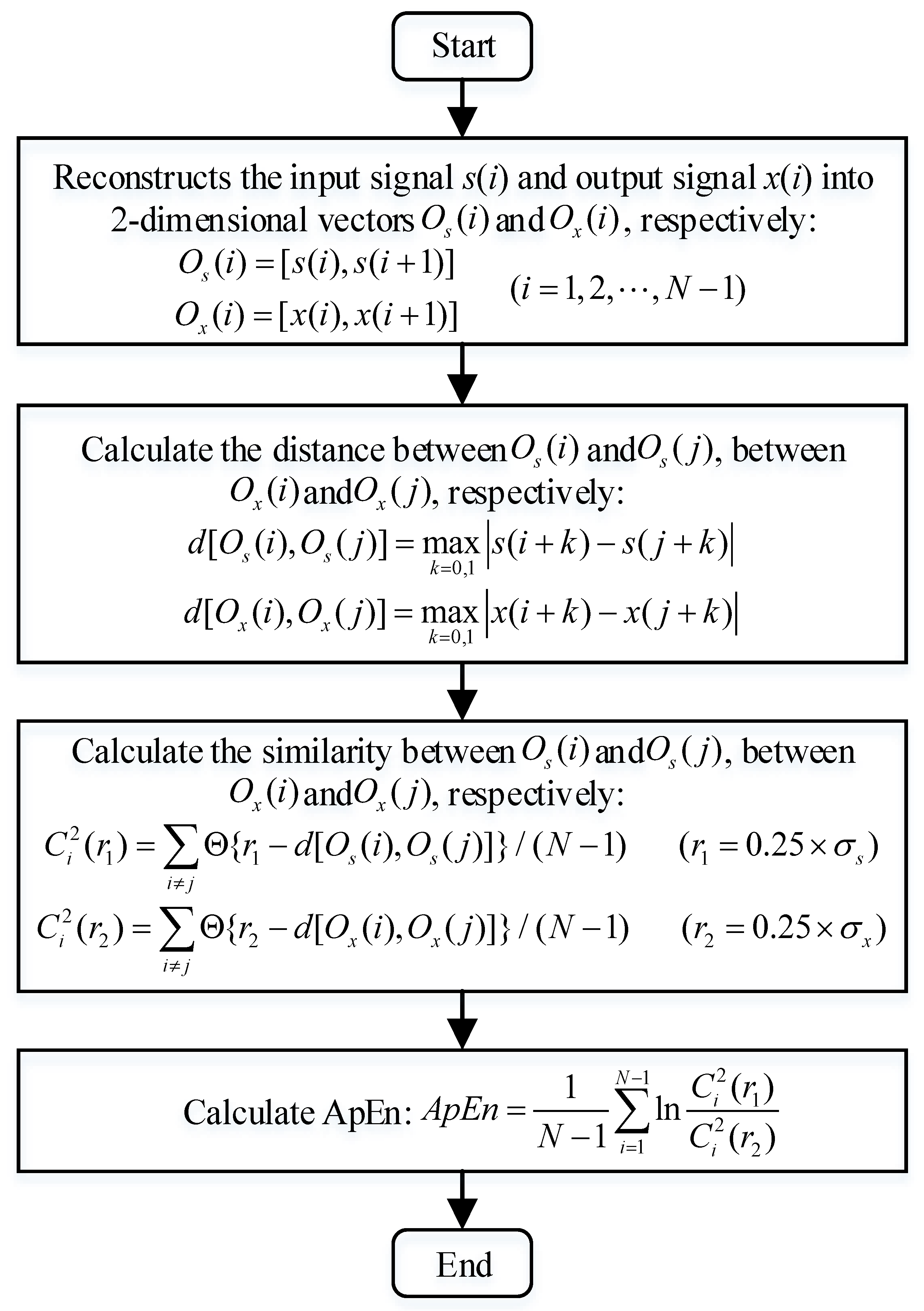
- Approximate Entropy (ApEn)
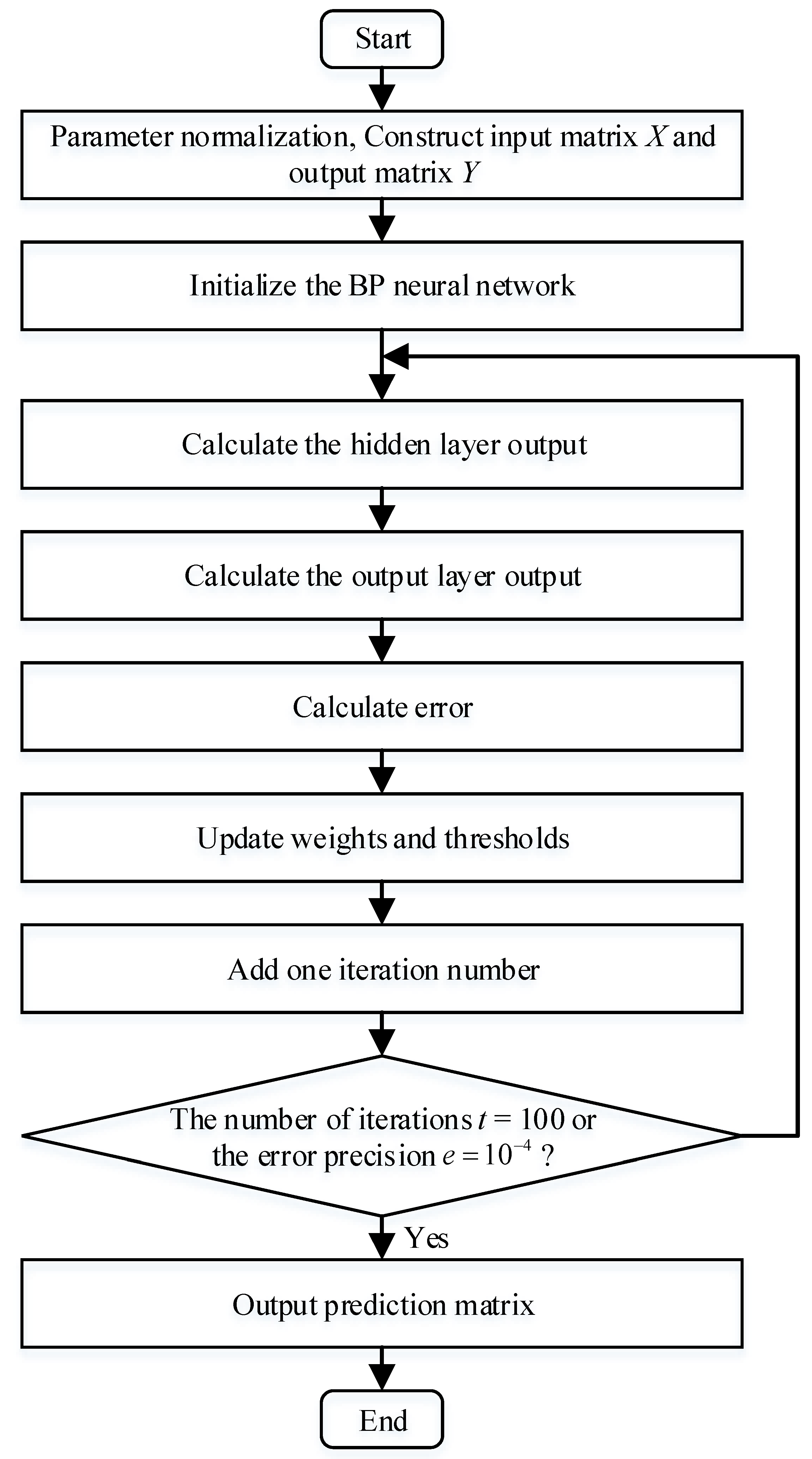
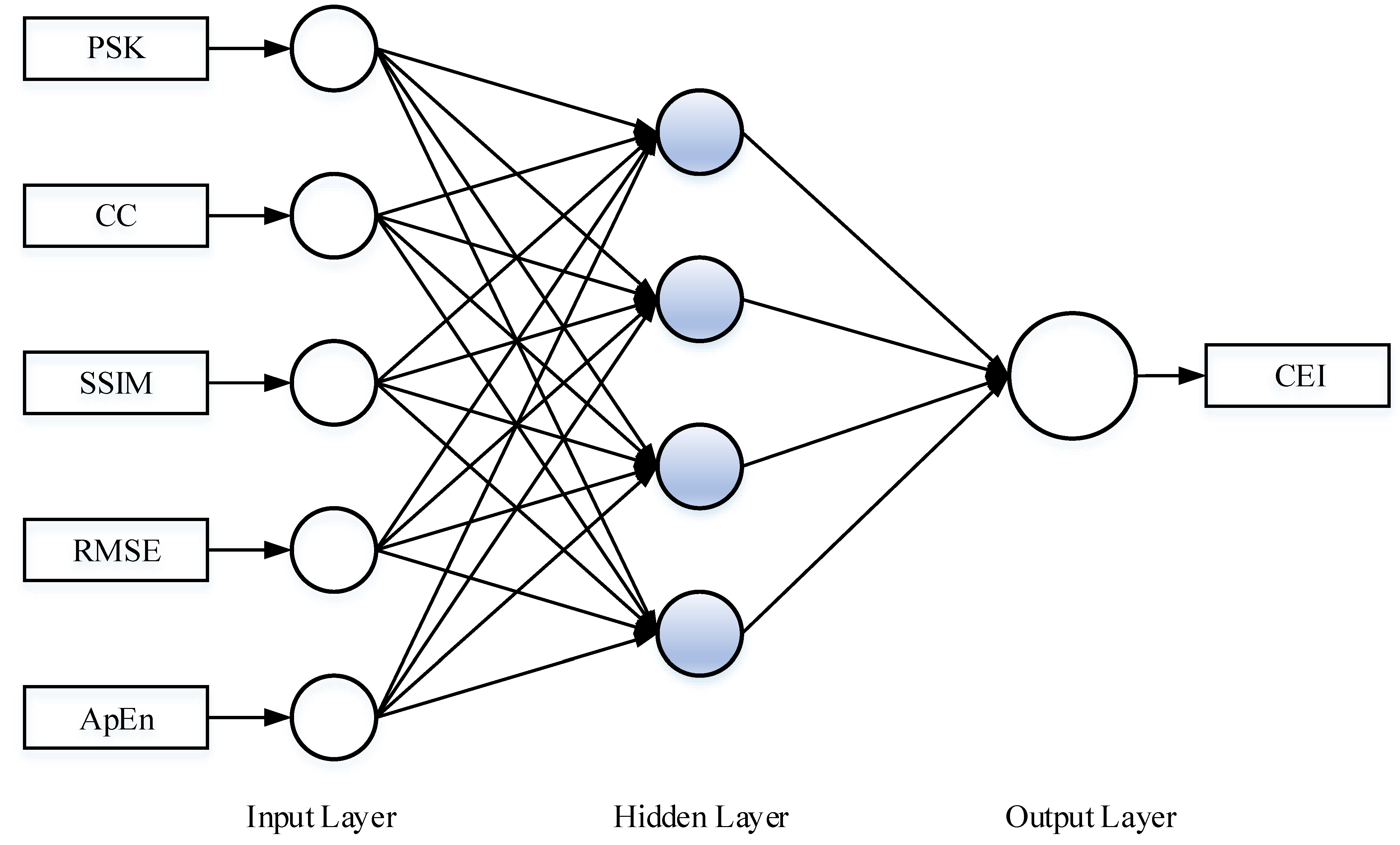
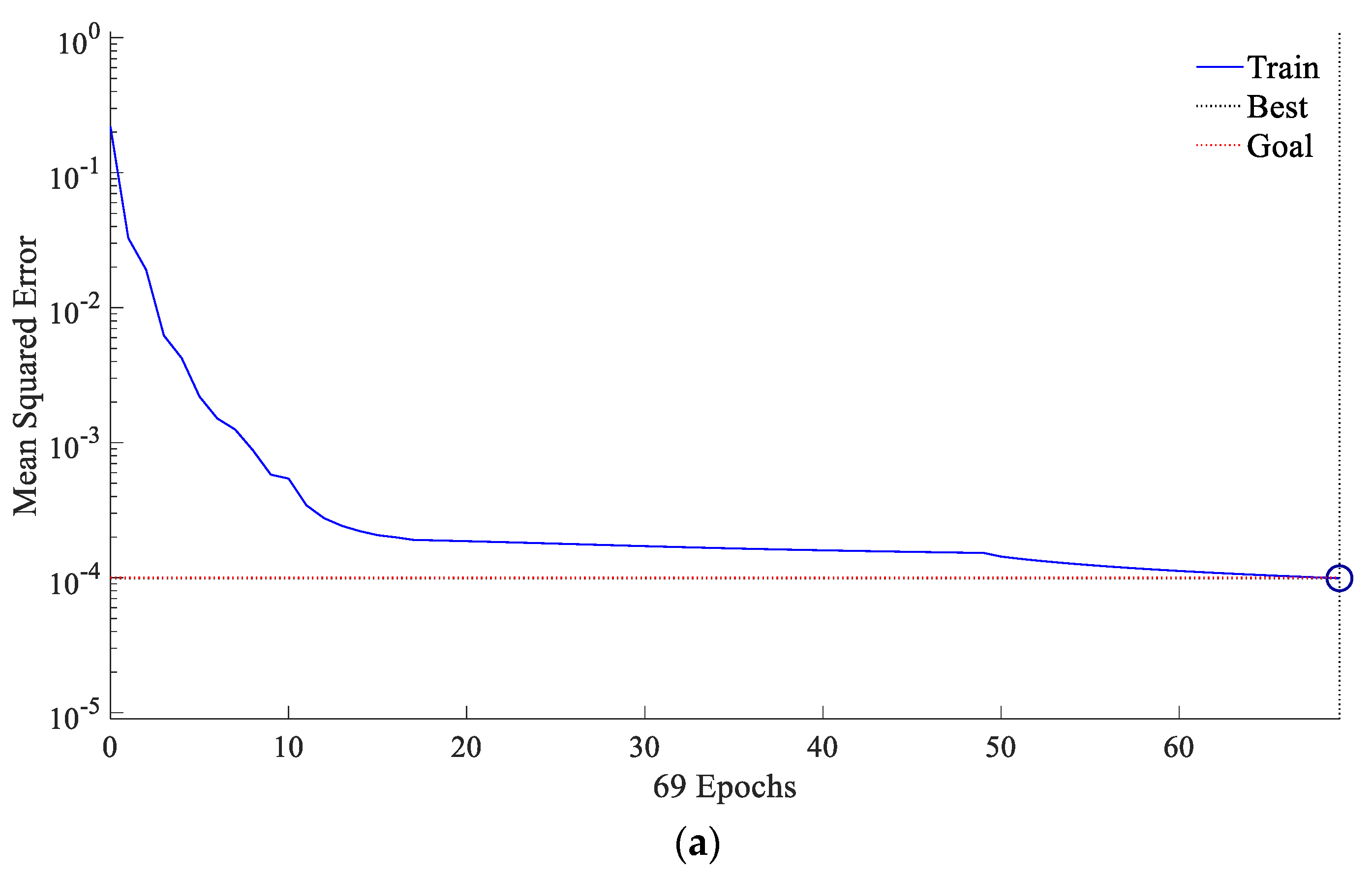
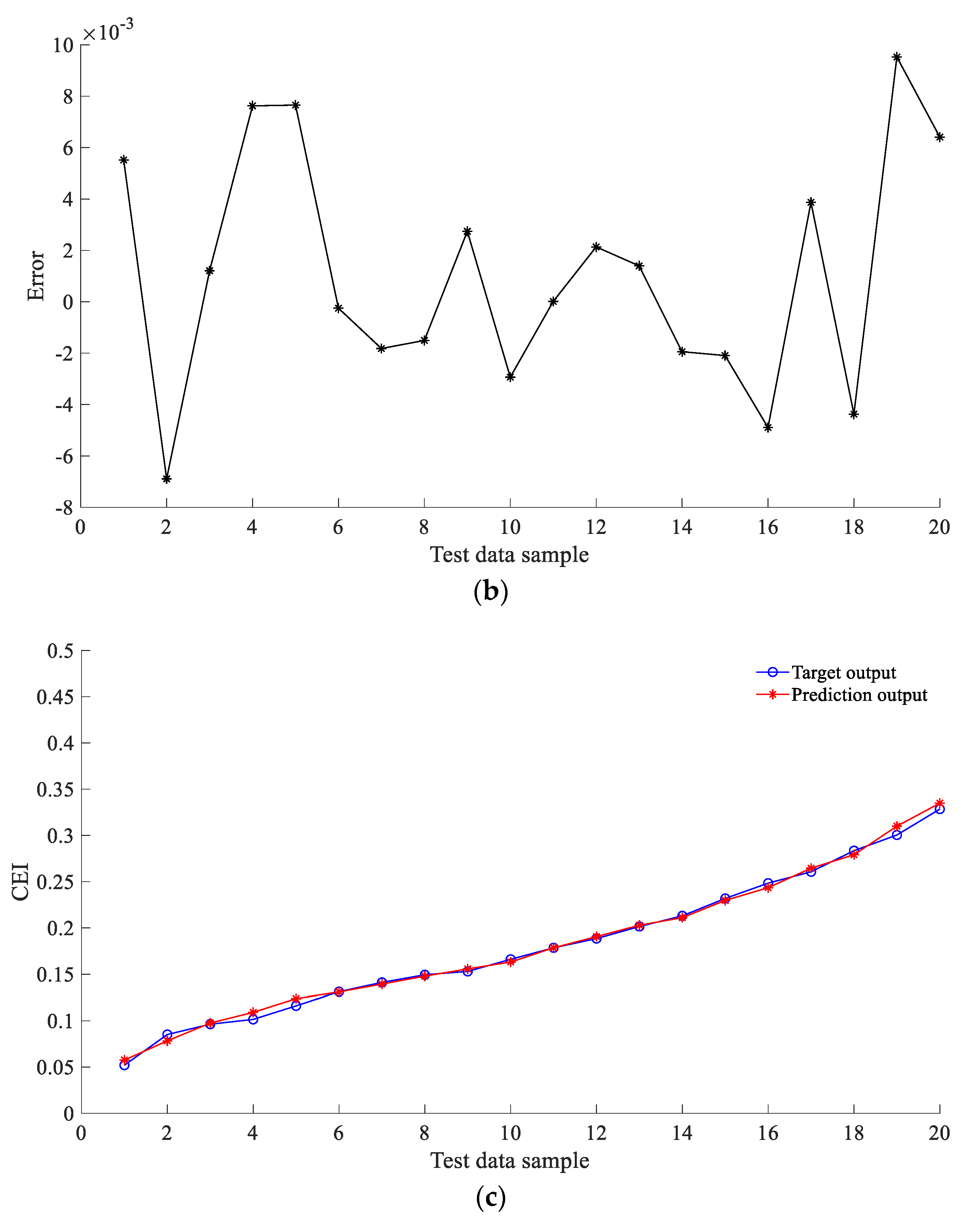
3.3.2. Index Fusion Based on BP Neural Network
3.3.3. Performance Evaluation of CEI
3.4. SAFRM Adaptive SR Based on CEI
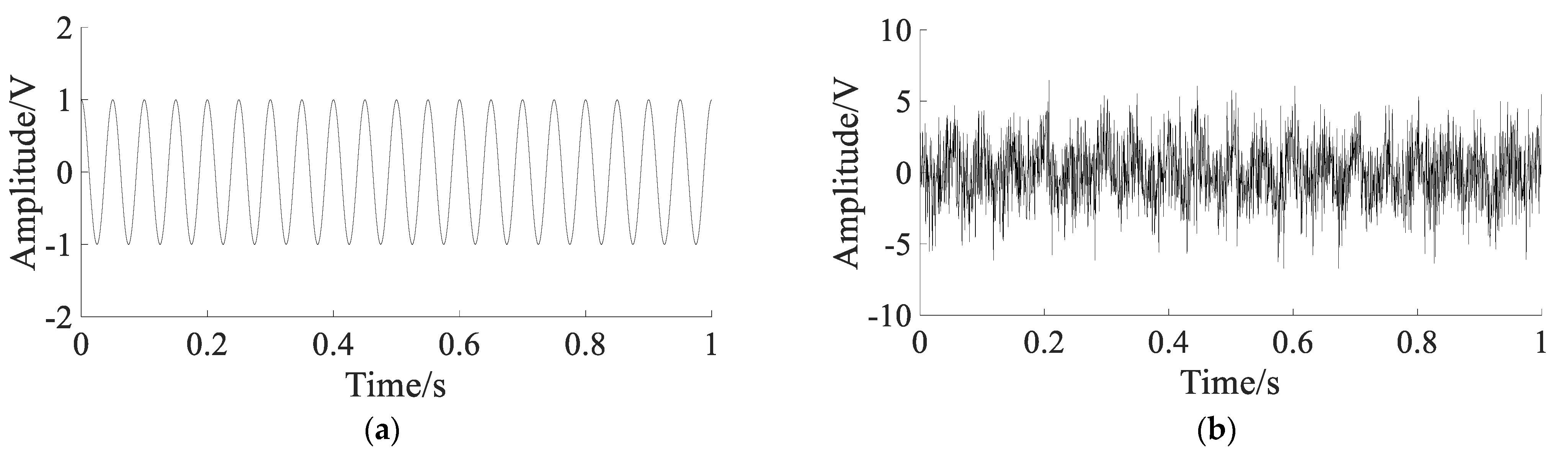
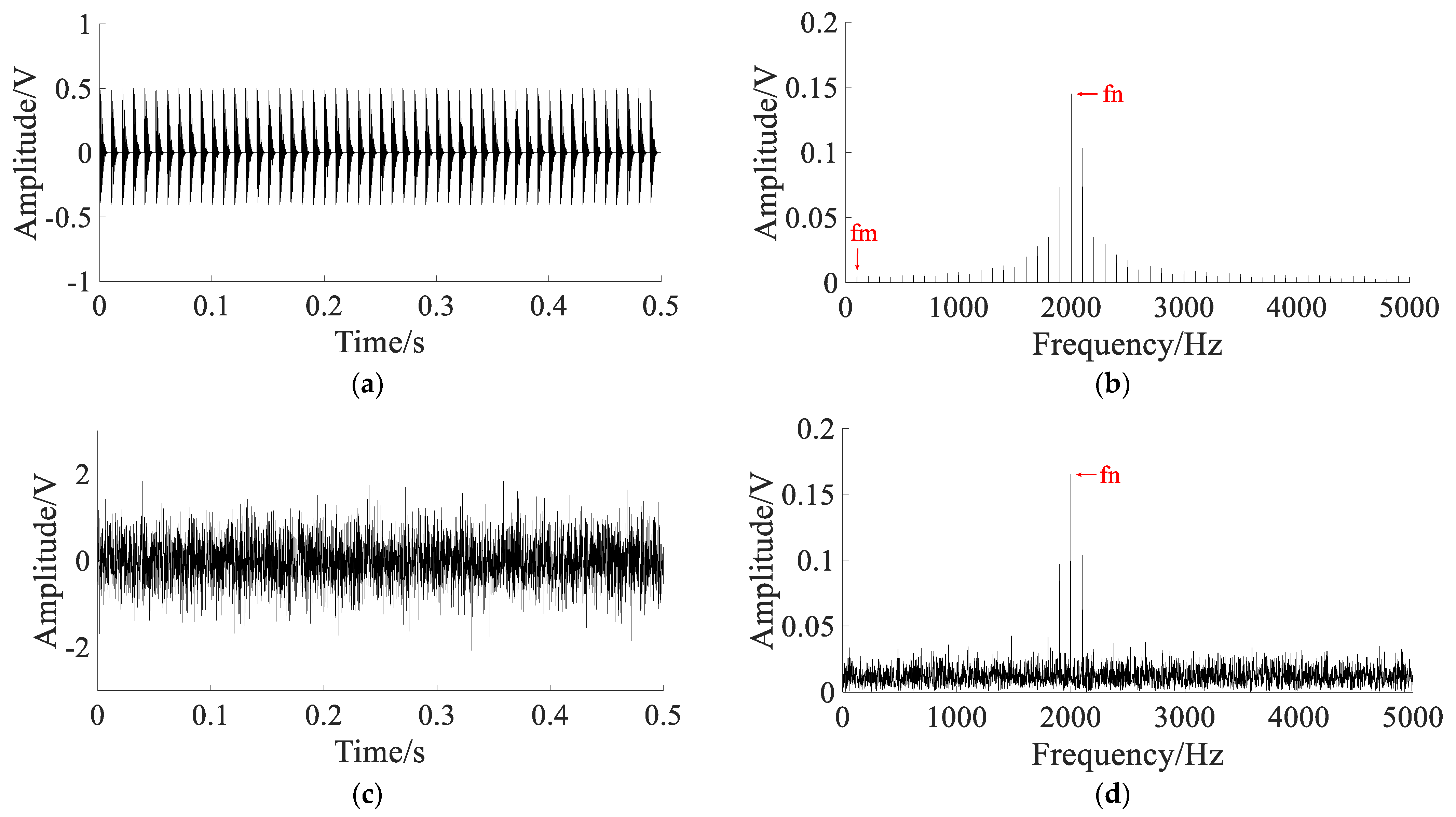
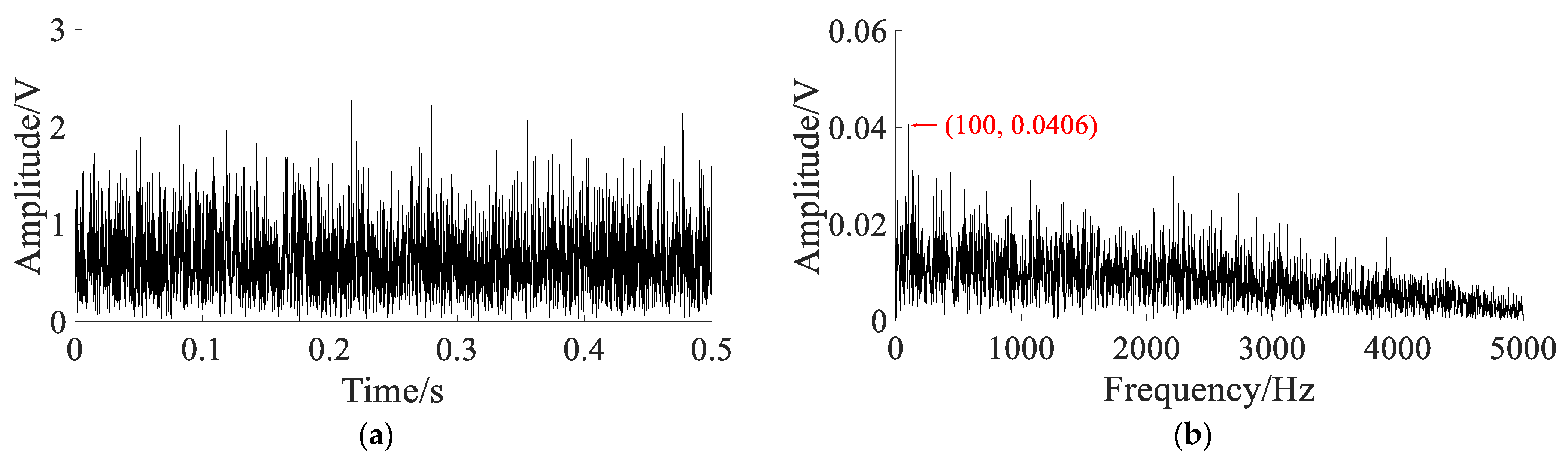
4. Simulation
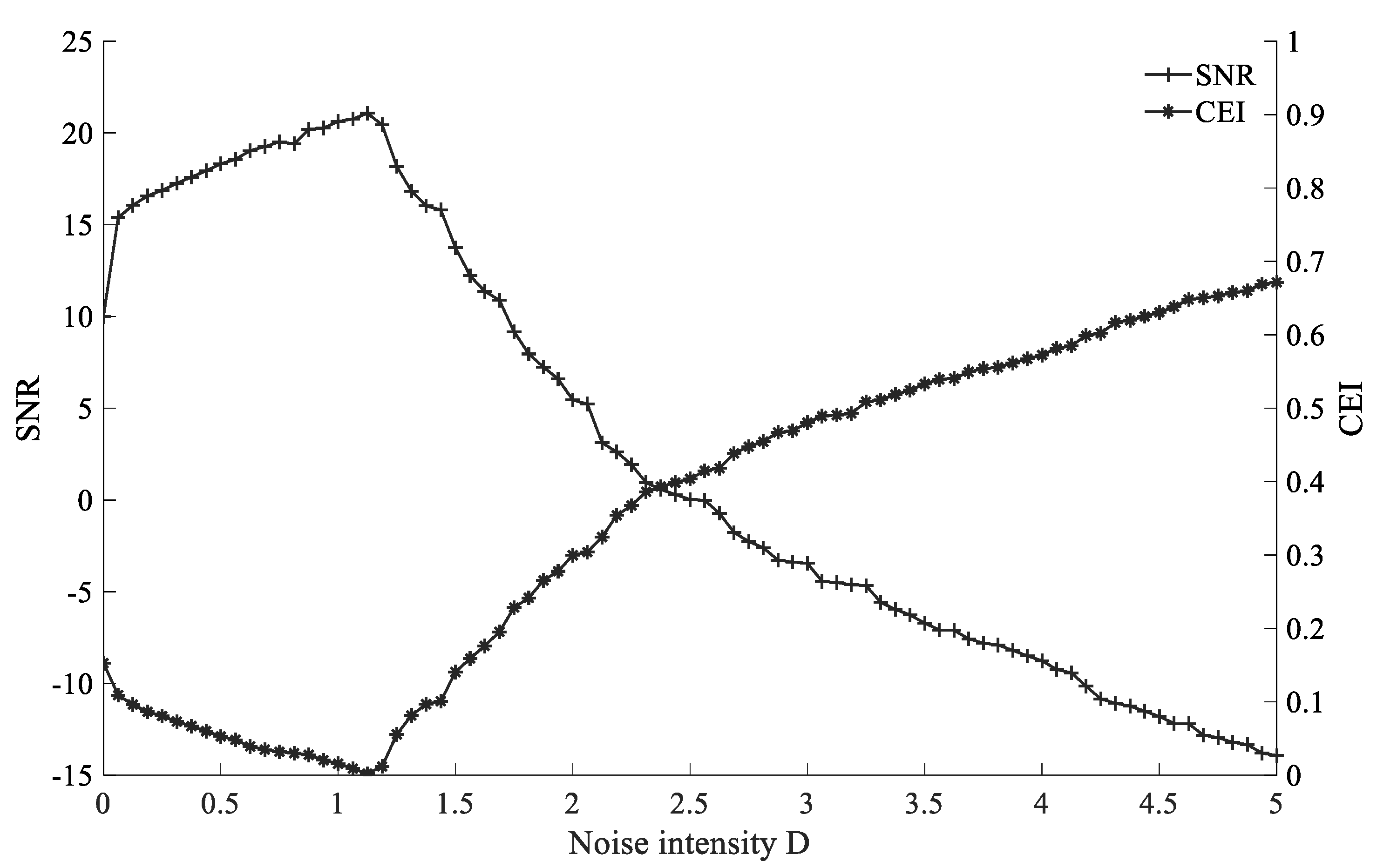
4.1. Performance Comparison of CEI and SNR
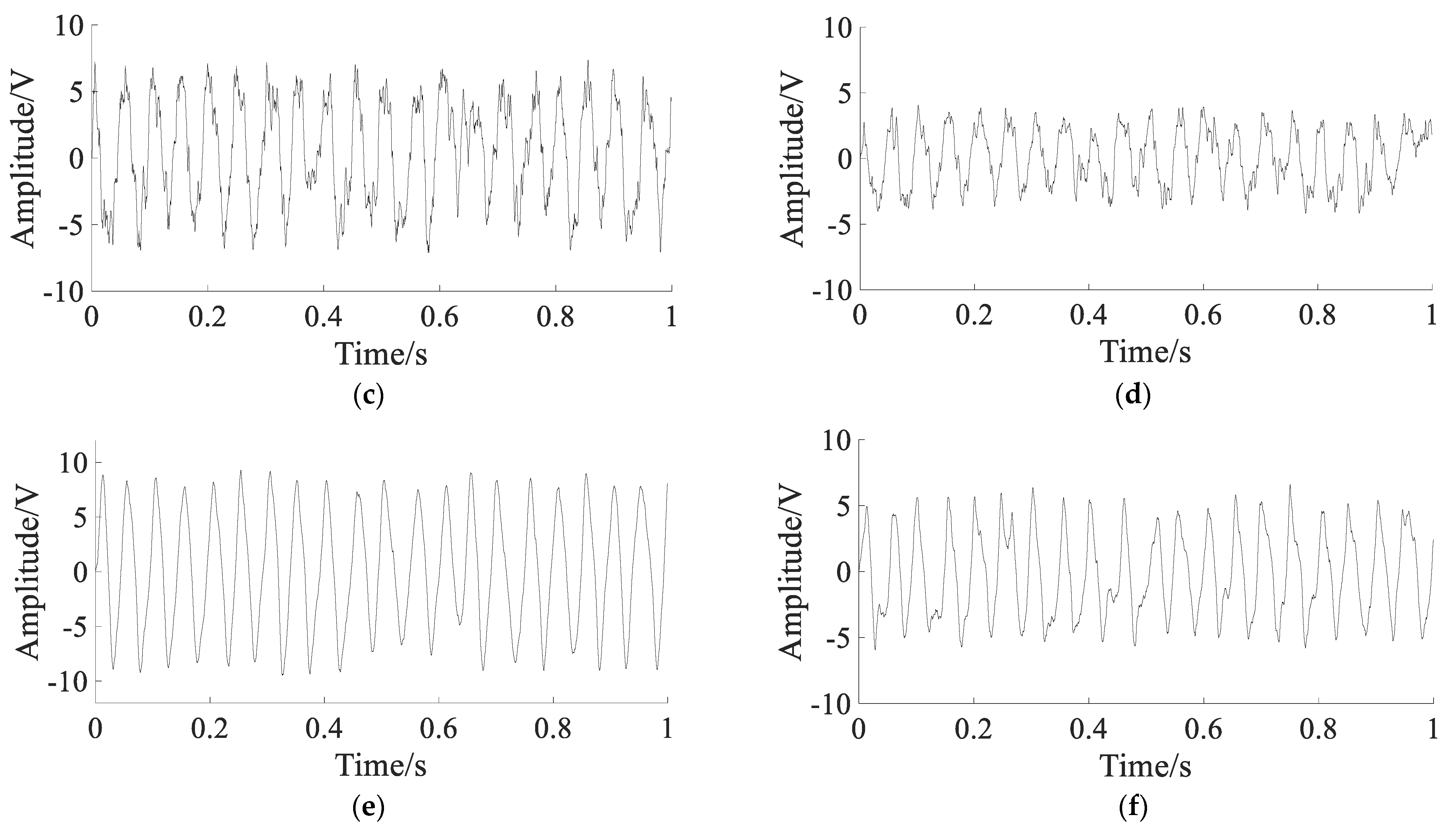
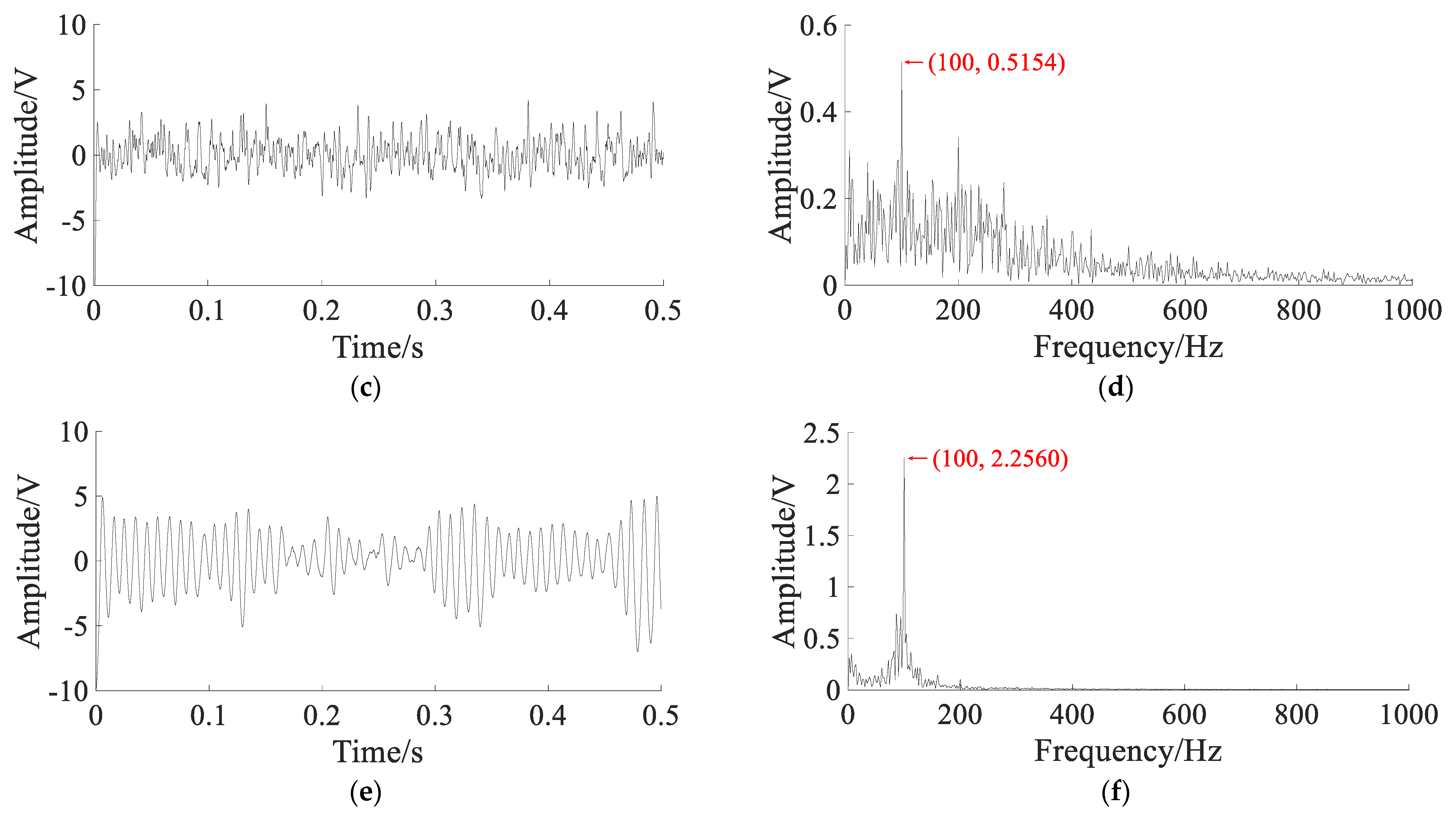
4.2. Performance Comparison of Two SR Methods
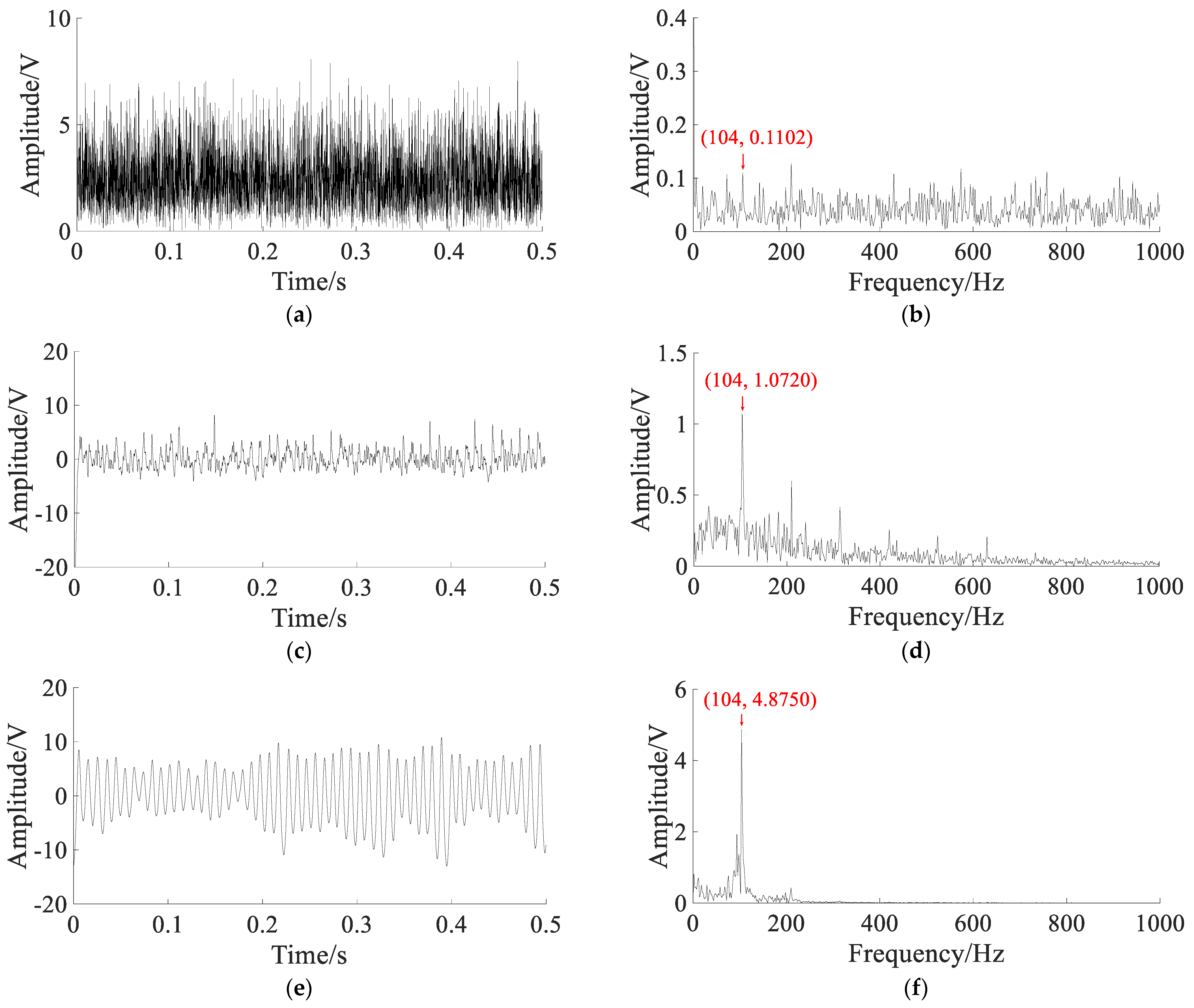
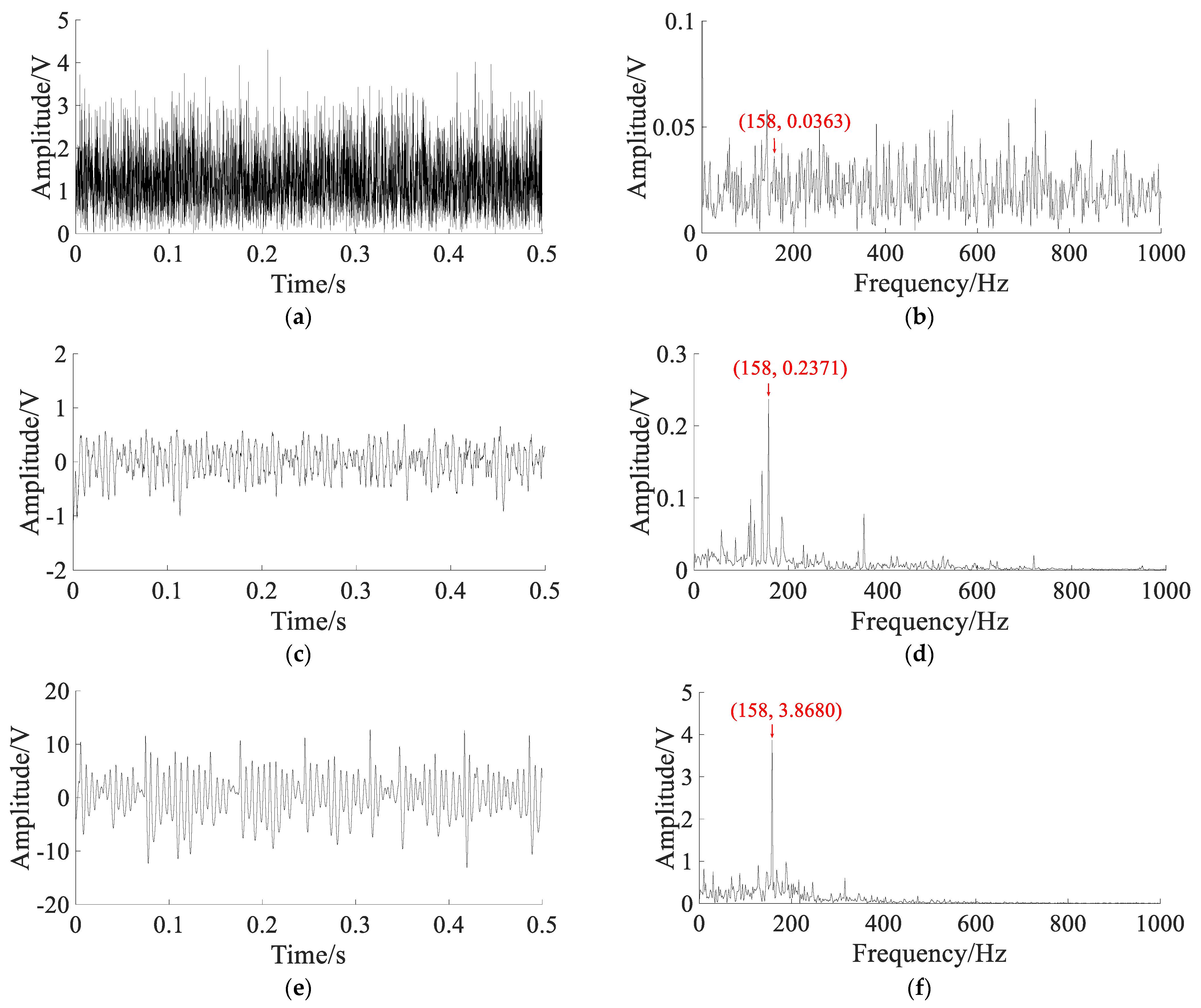
5. Application
6. Conclusions
- (1)
- Aiming at the difficulty of single scale transform coefficient to match the signal amplitude and characteristic frequency at the same time, a second-order amplitude-frequency re-scaling match SR method is proposed, which introduces the amplitude transform coefficient and frequency transform coefficient to realize the optimal match of signal, noise and nonlinear system.
- (2)
- Aiming at the difficult of the SNR calculation in engineering signal, a new comprehensive evaluation index is proposed, which uses the BP neural network to fuse five indexes of power spectrum kurtosis, correlation coefficient, structural similarity, root mean square error and approximate entropy. This CEI can overcome the reliance on unknown characteristic frequency, and the SR system can obtain the optimal parameters at minimum CEI. Through the optimal SR system based on the proposed method, a weak fault characteristic signal can be extracted.
Author Contributions
Funding
Conflicts of Interest
References
- David, G.; Jon, D.; Javier, P. Data-driven fault diagnosis for electric drives: A review. Sensors 2021, 21, 4024. [Google Scholar]
- Lu, S.L.; He, Q.B.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Signal Process. 2019, 116, 230–260. [Google Scholar]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, 453–457. [Google Scholar] [CrossRef]
- Qiao, Z.J.; Lei, Y.G.; Li, N.P. Applications of stochastic resonance to machinery fault detection: A review and tutorial. Mech. Syst. Signal Process. 2019, 122, 502–536. [Google Scholar]
- Tan, J.Y.; Chen, X.F.; Lei, Y.G.; He, Z.J. Adaptive frequency-shifted and re-scaling stochastic resonance with applications to fault diagnosis. J. Xi’an Jiaotong Univ. 2019, 43, 69–73. [Google Scholar]
- Wang, J.; He, Q.B.; Kong, F.R. An improved multiscale noise tuning of stochastic resonance for identifying multiple transient faults in rolling element bearings. J. Sound Vib. 2014, 333, 7401–7421. [Google Scholar]
- Leng, Y.G.; Wang, T.Y. Numerical research of twice sampling stochastic resonance for the detection of a weak signal submerged in a heavy Noise. Acta Phys. Sin. 2003, 52, 2432–2437. [Google Scholar] [CrossRef]
- Kong, D.Y.; Peng, H.; Ma, J.Q. Adaptive stochastic resonance method based on artificial-fish swarm optimization. Acta Elect. Sin. 2017, 45, 1864–1872. [Google Scholar]
- Lai, Z.H.; Leng, Y.G. Generalized parameter-adjusted stochastic resonance of duffingoscillator and Itsapplication to weak-signal detection. Sensors 2015, 15, 21327–21349. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Liu, Z.W.; He, Z.J. An adaptive stochastic resonance method based on grey wolf optimizer algorithm and its application to machinery fault diagnosis. ISA Trans. 2017, 71, 206–214. [Google Scholar]
- Lei, Y.G.; Qiao, Z.J.; Xu, X.F.; Lin, J.; Niu, S.T. An underdamped stochastic resonance method with stable-state matching for incipient fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2017, 94, 148–164. [Google Scholar] [CrossRef]
- He, L.F.; Cui, Y.Y.; Zhang, T.Q.; Zhang, G.; Song, Y. Fault signal detection method based on power function type bistable stochastic resonance. Chin. J. Sci. Instrum. 2016, 37, 1457–1467. [Google Scholar]
- Wang, D.W.; Wang, Z.B. Weak ultrasonic signal detection in strong noise. Acta Phys. Sin. 2018, 67, 65–77. [Google Scholar]
- Yang, Y.; Li, F.; Zhang, N.; Huo, A.Q. Research on the cooperative detection of stochastic resonance and chaos for weak SNR signals in measurement while drilling. Sensors 2021, 21, 3011. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Wang, H.; Zhang, T.Q. Stochastic resonance of coupled time-delayed system with fluctuation of mass and frequency and its application in bearing fault diagnosis. J. Cent South Univ. 2021, 28, 2931–2946. [Google Scholar]
- Lucio, F.R.; Guillermo, E.F. Quartic double-well system modulation for under-damped stochastic resonance tuning. Digit. Signal Process. 2016, 52, 55–63. [Google Scholar]
- Bruce, M.; Kurt, W. Theory of stochastic resonance. Phys. Rev. A 1989, 39, 4854. [Google Scholar]
- Dong, H.T.; Wang, H.Y.; Shen, X.H.; Jiang, Z. Effects of second-order matched stochastic resonance for weak signal detection. IEEE Access. 2018, 6, 46505–46515. [Google Scholar] [CrossRef]
- Lu, S.L.; He, Q.B.; Kong, F.R. Effects of underdamped step-varying second-order stochastic resonance for weak signal detection. Digit. Signal Process. 2015, 36, 93–103. [Google Scholar]
- Lin, Y.; Xu, X.A.; Ye, C. Adaptive stochastic resonance quantified by a novel evaluation index for rotating machinery fault diagnosis. Measurement 2021, 184, 423–440. [Google Scholar]
- Saha, D.K.; Hoque, M.E.; Badihi, H. Development of intelligent fault diagnosis technique of rotary machine element bearing: A machine learning approach. Sensors 2022, 22, 1073. [Google Scholar] [CrossRef]
- Cong, H.N.; Yu, M.Y.; Gao, Y.H.; Fang, M.H. A new method for rubbing fault identification based on the combination of improved particle swarm optimization with self-adaptive stochastic resonance. J. Fail. Anal. Prev. 2022, 22, 690–703. [Google Scholar] [CrossRef]
- Kovacic, I.; Brennan, M.J. The Duffing Equation: Nonlinear Oscillators and their Behaviour; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Zhou, P.; Lu, S.L.; Liu, F.; Liu, Y.B.; Li, G.H.; Zhao, J. Novel synthetic index-based adaptive stochastic resonance method and its application in bearing fault diagnosis. J. Sound Vib. 2017, 391, 194–210. [Google Scholar]
- Wang, J.; He, Q.B.; Kong, F.R. Adaptive multiscalenoisetuning stochastic resonance for health diagnosis of rolling element bearings. IEEE Trans. Inst. Meas. 2015, 64, 564–577. [Google Scholar] [CrossRef]
- Li, Q.; Wang, T.Y.; Leng, Y.G.; Wang, W.; Wang, G.F. Engineering signal processing based on adaptive step-changed stochastic resonance. Mech. Syst. Signal Process. 2006, 21, 2267–2279. [Google Scholar]
- Kay, S.M. Fundamentals of statistical signal processing: Estimation theory. Technometrics 2012, 37, 465–466. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Count | Noise Intensity | PSK | CC | SSIM | RMSE | ApEn | SNR |
|---|---|---|---|---|---|---|---|
| 1 | 0.05 | 913.5260 | 0.9151 | 0.9954 | 0.3182 | 0.5156 | 22.9475 |
| 2 | 0.10 | 827.3234 | 0.8404 | 0.9924 | 0.4569 | 0.7350 | 16.9511 |
| 3 | 0.15 | 756.7657 | 0.7851 | 0.9843 | 0.5524 | 0.8950 | 13.4987 |
| … | … | … | … | … | … | … | … |
| 198 | 9.90 | 4.7536 | 0.1235 | 0.0059 | 4.4385 | 1.8435 | −25.6313 |
| 199 | 9.95 | 4.6039 | 0.1219 | 0.0057 | 4.4473 | 1.8467 | −27.1864 |
| 200 | 10 | 4.3926 | 0.1215 | 0.0056 | 4.4978 | 1.8483 | −28.1692 |
| Amplitude/V | CEI of the Output Signal | Amplitude Multiplier (Compared to the Noisy Signal) | Reduced CEI (Compared to the Noisy Signal) | |
|---|---|---|---|---|
| Noisy signal | 0.0164 | 0.6243 | 1 | 0 |
| Hilbert envelope demodulation | 0.0456 | 0.3777 | 2.78 | 0.2466 |
| SGST adaptive SR | 0.5154 | 0.1826 | 31.43 | 0.4417 |
| Proposed method | 2.2560 | 0.0852 | 137.56 | 0.5391 |
| Fault Location | Fault Diameter (Inches) | Motor Load (HP) | Approximate Motor Speed (rpm) | Fault Characteristic Frequency (Hz) |
|---|---|---|---|---|
| Outer ring | 0.007 | 2 | 1750 | 104.6 |
| Inner ring | 0.014 | 2 | 1750 | 157.9 |
| Amplitude/V | CEI of the Output Signal | Amplitude Multiplier (Compared to the Noisy Signal) | Reduced CEI (Compared to the Noisy Signal) | ||
|---|---|---|---|---|---|
| Outer ring | Noisy signal | 0.0706 | 0.7309 | 1 | 0 |
| Hilbert envelope demodulation | 0.1102 | 0.5323 | 1.56 | 0.1986 | |
| SGST adaptive SR | 1.0720 | 0.2555 | 15.18 | 0.4754 | |
| Method of this paper | 4.875 | 0.0820 | 69.05 | 0.6489 | |
| Inner ring | Noisy signal | 0.0249 | 0.6142 | 1 | 0 |
| Hilbert envelope demodulation | 0.0363 | 0.4076 | 1.46 | 0.2066 | |
| SGST adaptive SR | 0.2371 | 0.1743 | 9.52 | 0.4399 | |
| Method of this paper | 3.8680 | 0.1297 | 155.34 | 0.4845 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Li, Z.; Zhou, F.; Ma, Y.; Yan, B. Weak Fault Feature Extraction Method Based on Improved Stochastic Resonance. Sensors 2022, 22, 6644. https://doi.org/10.3390/s22176644
Yang Z, Li Z, Zhou F, Ma Y, Yan B. Weak Fault Feature Extraction Method Based on Improved Stochastic Resonance. Sensors. 2022; 22(17):6644. https://doi.org/10.3390/s22176644
Chicago/Turabian StyleYang, Zhen, Zhiqian Li, Fengxing Zhou, Yajie Ma, and Baokang Yan. 2022. "Weak Fault Feature Extraction Method Based on Improved Stochastic Resonance" Sensors 22, no. 17: 6644. https://doi.org/10.3390/s22176644
APA StyleYang, Z., Li, Z., Zhou, F., Ma, Y., & Yan, B. (2022). Weak Fault Feature Extraction Method Based on Improved Stochastic Resonance. Sensors, 22(17), 6644. https://doi.org/10.3390/s22176644