
Automatic Landing of Unmanned Aerial Vehicles via Wireless Positioning System with Pseudo-Conical Scanning



Abstract
:1. Introduction
- It is possible to track and navigate remote objects at relatively bigger distances compared to optical systems. Restrictive condition is the radio connection energy balance with the mobile object.
- Satisfactory accuracy for navigating, directing, and performing the automatic landing process. Due to the nature of PCS, it is interesting to note that positioning accuracy increases with decreasing distance between UAV and landing pad.
- The landing pad may be of dimensions commensurate with the UAV size.
- Ability to work in bad weather, rain, snow, smoky areas, etc. Of course, it depends on the selected operating frequency, which affects the propagation of electromagnetic waves.
- Possibility to land on mobile platforms.
- Relatively low cost and easy implementation.
2. Materials and Methods
2.1. Pseudo-Conical Navigation System
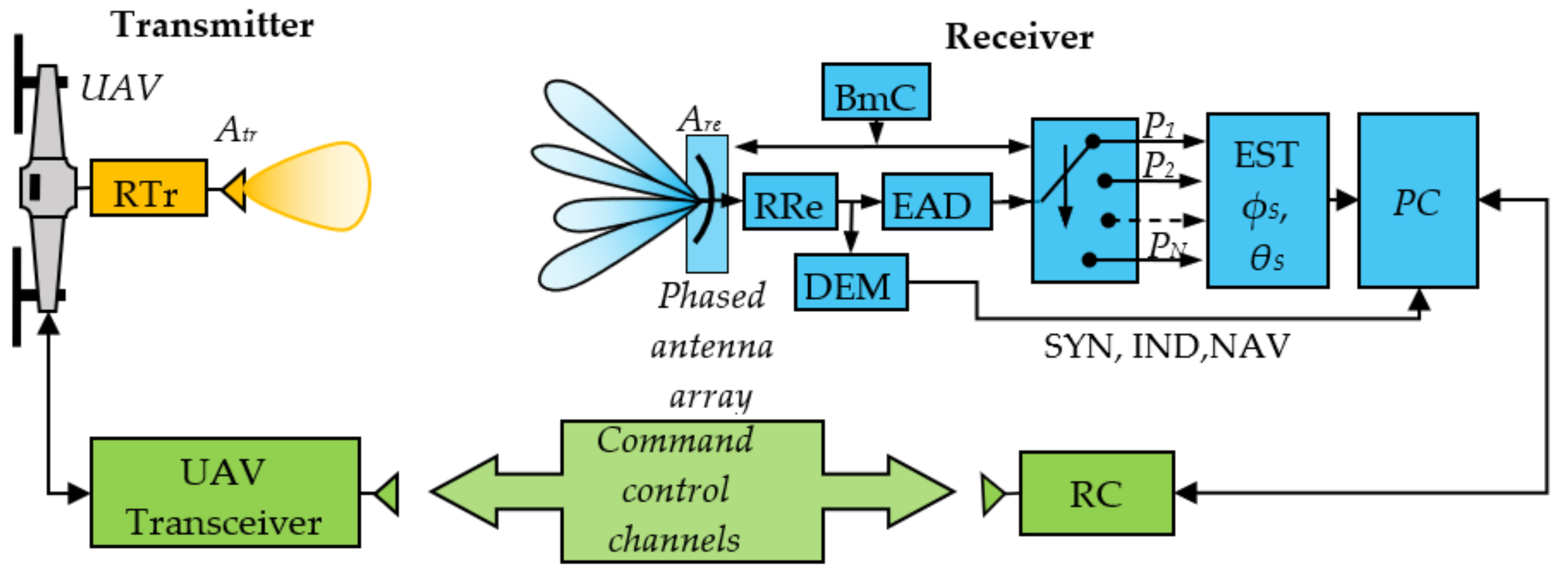
- The transmitting part is located in LP. The receiving part is on a UAV, and it uses PCS. All tracking and positioning processing is performed in the UAV, and these functions can be integrated into the vehicle’s onboard algorithms. The disadvantage of this approach is that the receiving part antenna system has more weight than the transmitting part because it has to perform a pseudo-conical scan. Additionally, the receiving antenna dimensions and its location will affect the flight characteristics. The vehicle energy source must have a larger capacity to provide energy for the operation of the receiver and UAV in landing mode. This requirement also applies to other options. Energy must be provided for the transmitting or receiving part of the PCS system.
- The UAV has a transmitting part, and the receiving part is in the LP. This option is more suitable according to the above considerations, but it requires landing positioning commands to be transmitted from the LP via a communication channel. That is not a significant problem because remote control channels can be used and keep the same device positional data format. The positioning and landing algorithms can then be integrated into the remote control module.
- The radiated UAV radio signals can be used instead of having a separate unique transmitter. They usually bear system messages and/or video streams generated by a camera located on the device. Then, only the receiving part of the landing site is needed. This option significantly reduces the whole system complexity: no need to install additional UAV equipment, it does not increase the UAV weight, and it reduces the system cost.
2.1.1. Transmitting Part
- The antennas size, weight, and radiation patterns feasibility largely depend on the operating frequency.
- The electromagnetic wave propagation attenuation depends on the wavelength. That significantly affects the radio link budget. Free licensed frequencies also are limited by the maximum isotropic radiated power of transmitters. That limits the operating range of the positioning system.
- The UAV radio signals emitted for its operation can be used. For example, navigation and control signals, signals related to the transmission of video streams, etc. This feature should be used because it has many advantages. No additional PCS transmitter is required to be mounted on the UAV. Apart from the cost, this is especially important for maintaining the aircraft’s flight characteristics, related to payload weight, energy consumption, flight distance, etc.
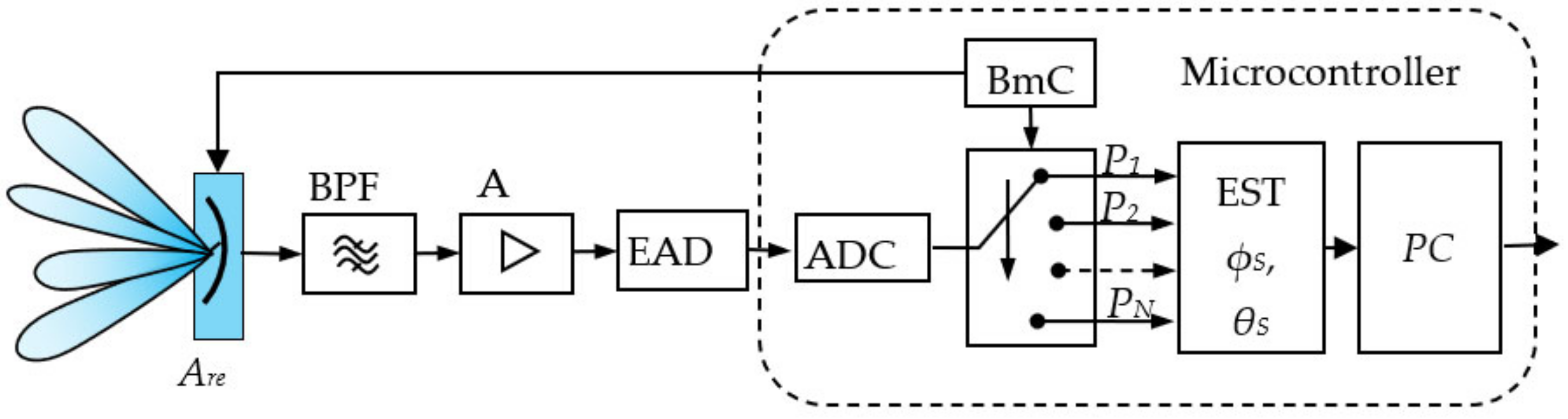
2.1.2. Receiving Part
2.1.3. Phased Antenna Array with Pseudo-Conical Electronic Scanning
- Operating frequency. The operating frequency is determined according to the given system frequency considerations.
- PAA with circular polarization. Thus, the UAV can use a transmitting antenna with linear polarization. That minimizes the received power dependence on the difference in the UAV directions coordinate systems and landing pad.
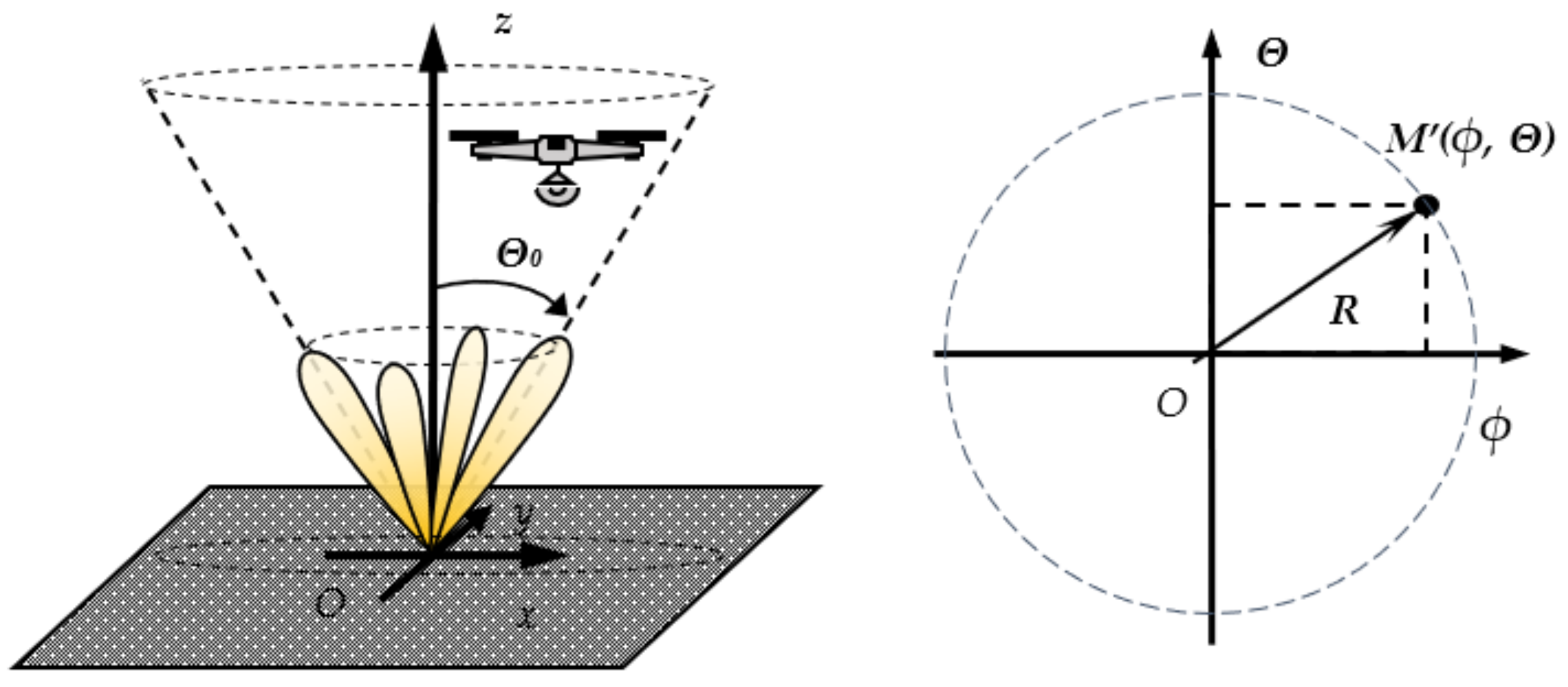
- The number of beams for pseudo-conical scanning. They determine the positioning accuracy and the algorithm complexity for estimating angular deviations and the sensor complexity and cost. With many beam states, an increase in the angular coordinates estimating accuracy is expected. However, on the other hand, this leads to antenna sensor complexity, such as an increased number of elementary antennas in PAA, increased number of additional elements for their excitation, complex implementation, larger antenna dimensions, and increased cost. Therefore, a compromise is sought to meet the conflicting requirements outlined above. The number of beams of the antenna array is chosen to be at least equal to 5, with one central beam and four deviated in the coordinate system directions—Table 1.Table 1. States and deviations of the beams.
Antenna Beam State i Angular Deviation of the Beam
in Both Planes [deg]0, Central (Null) position ϕo = 0°, θo = 0° 1, Back direction (B) ϕo = 0°, θo = −20° 2, Right direction (R) ϕo = 20°, θo = 0° 3, Forward direction (F) ϕo = 0°, θo = 20° 4, Left direction (L) ϕo = −20°, θo = 0° - Beam deviation angle Θ0. The angle determines not only the PAA complexity but also the UAV angular engagement range before positioning. This parameter also determines the system’s minimum range of acquisition—the distance from which the PCS tracks and UAV positions. In Table 1, we can see that the PCS angular deviation is Θ0 = 20°, and the system angular range is 2Θ0 = 40°. Assuming that the UAV is in flight mode and is guided to the landing site by some navigation system with coordinate uncertainty , then the minimum system engagement distance is determined by the formula:For example, if the UAV positioning system uses GPS with a relatively large value of for the altitude, = 16.5 m.
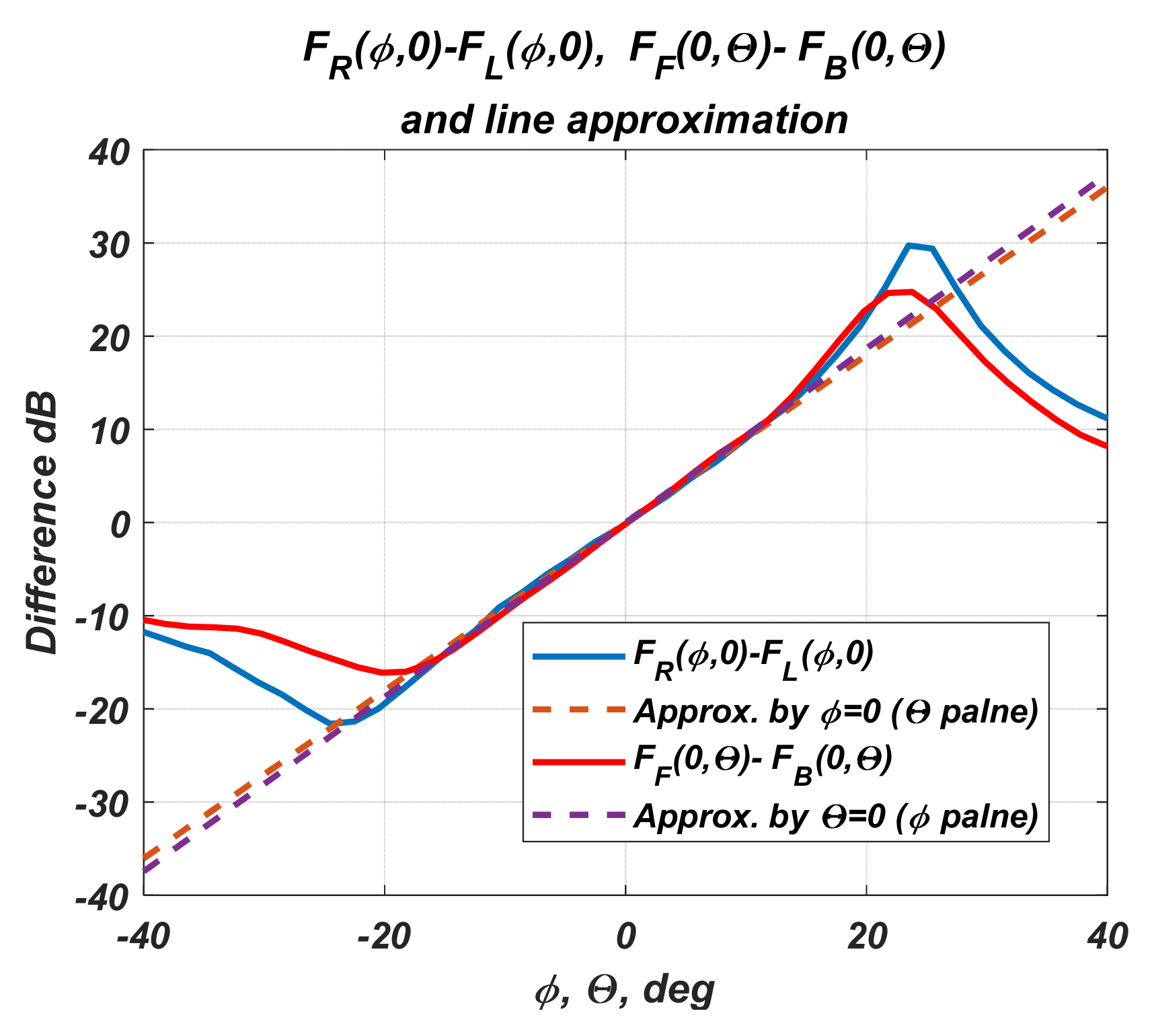
- The radiation pattern width of each beam depends on the diagrams of each PAA element, its number, and position. All this also affects the antenna gain. The beams should be symmetrical in two antenna planes xOz, yOz to simplify the signal processing. That means the number of elementary radiators must be the same in both Ox, and Oy, for example, 2 × 2, 4 × 4, etc. On the other hand, a narrow beam diagram implies a high characteristic steepness and hence more high accuracy. There is the problem of sensitivity in space areas where the PAA does not have sufficient gain. A compromise of Δϕmax = 20°, Δθmax = 20° for all beams is chosen. Research shows that then the diagram in the falling segment has a steepness of 2 dB/grad, which is sufficient for small distance positioning.
- Satisfactory amplification to achieve system sensitivity. A compromise shall be chosen between sensitivity and accuracy, and the PAA gain shall be not less than 6 dBi.
- Low level of the side lobles of each antenna beam states. Recommended to be no bigger than −10 dB.
- Compact dimensions.
- High-speed antenna beam switching.
- High reliability.
- Cheap realization.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2.1.4. UAV Angular Coordinates Determination
- They are intended for tracking satellites that are at a vast distance from the ground station—hundreds, thousands of kilometers, and in the considered system, the distance between the object and the sensor is dozens of meters.
- They use a conical scanning antenna with a narrow RP of a few degrees and have high amplification to achieve the required signal-to-noise ratio. The scanning antenna pattern is deflected to a small angle due to the long distances, and the order of deviation is a mdeg. For the used sensor, the beam deviation is dozens of degrees because considerations given in Section 2.1.3.
- Conical scanning is accomplished by the mechanical movement of a parabolic antenna. The number of beam states and measured powers is large for higher positioning accuracy. Here, the number of beam PAA states is proposed to be limited to four in the four directions in the antenna plane due to the imposed requirement of the PAA simplicity and the slight computational algorithms complexity.
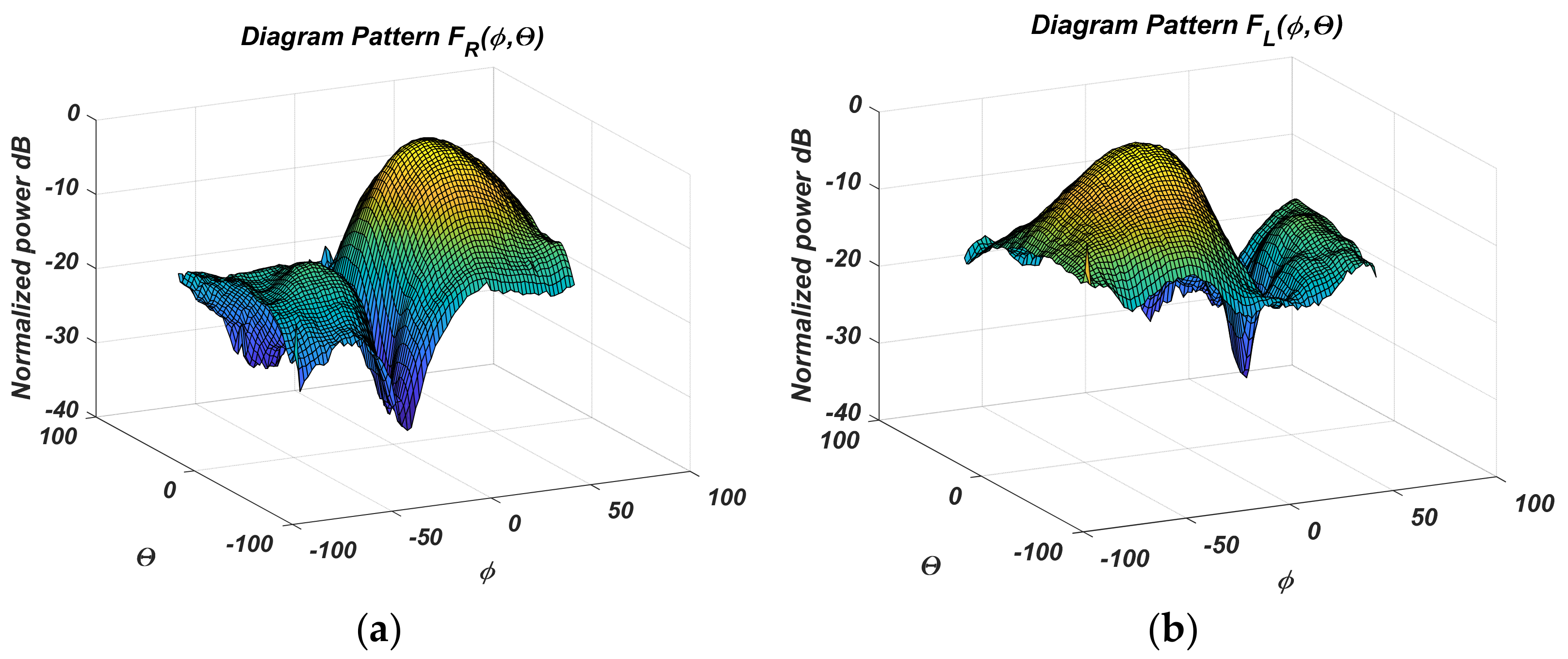
- The narrow diagram parabolic antenna allows applicating an analytical beam model approximated by a Gaussian function. It estimates the object angular deviations by giving a direct mathematical, deterministic analytical relationship between measured powers and satellite angular coordinates to the antenna axis. For the considered PAA with electronic scanning and a small number of elementary emitters, the diagram for the corresponding beam is inaccurately approximated by a Gaussian function. Additionally, the side lobes level is higher, and such an approximation will increase the estimation error.
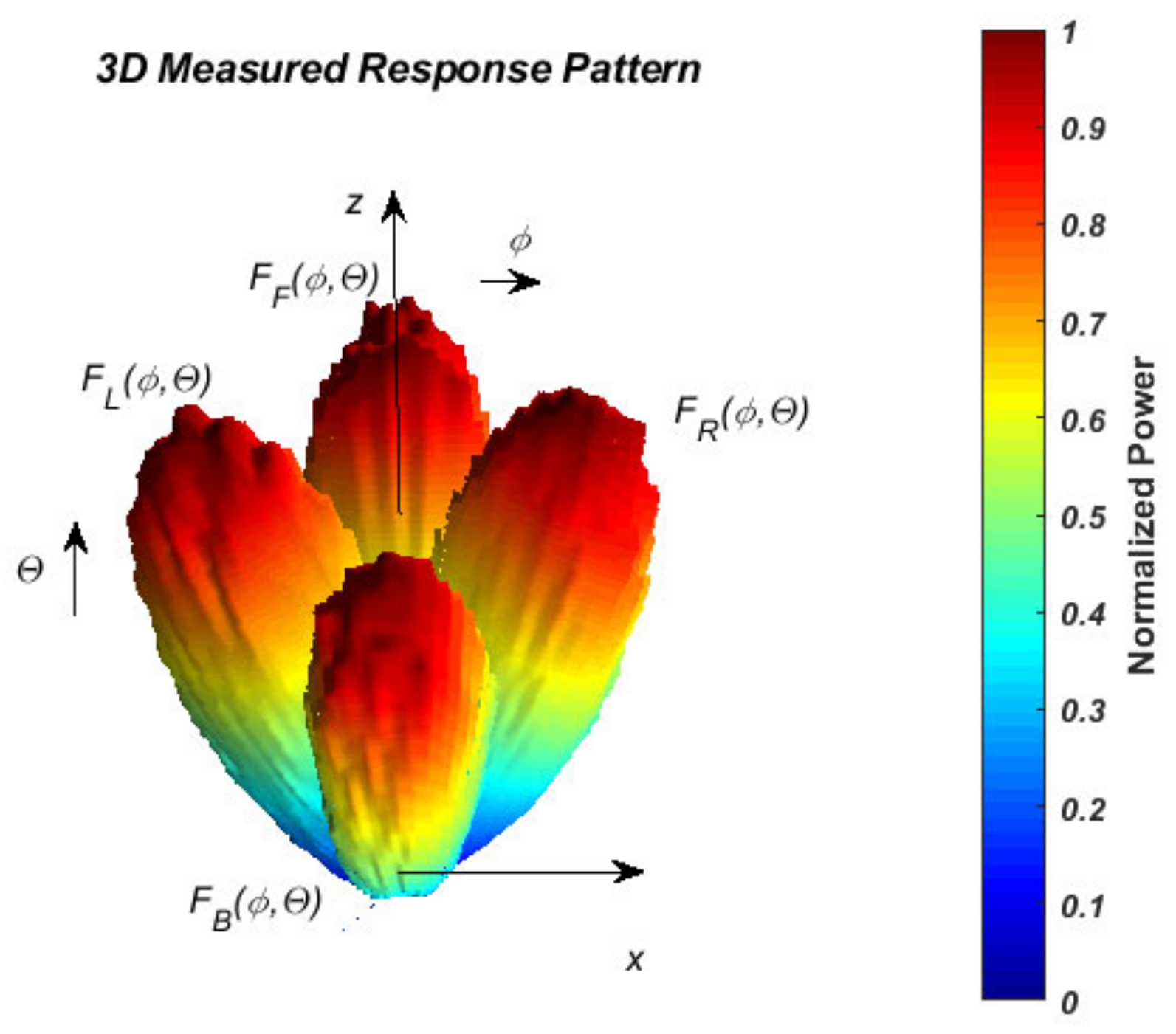
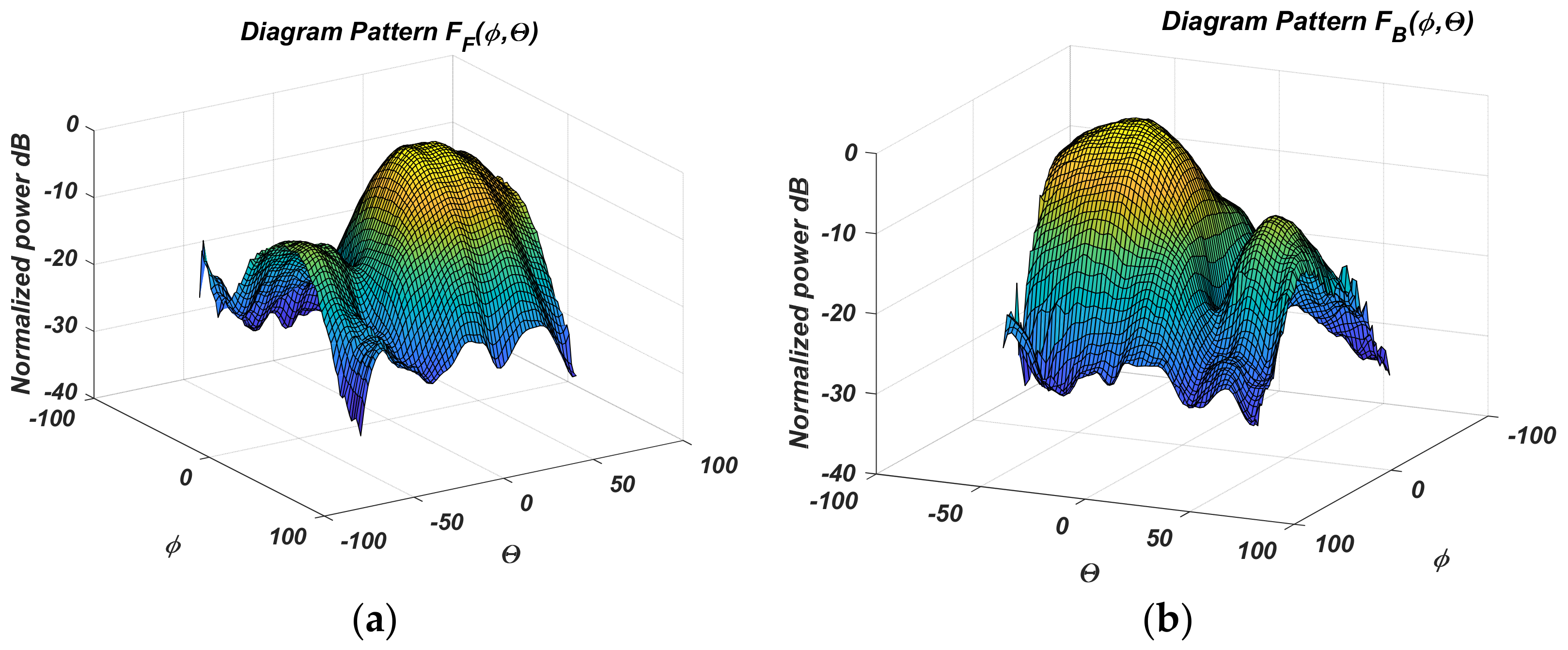
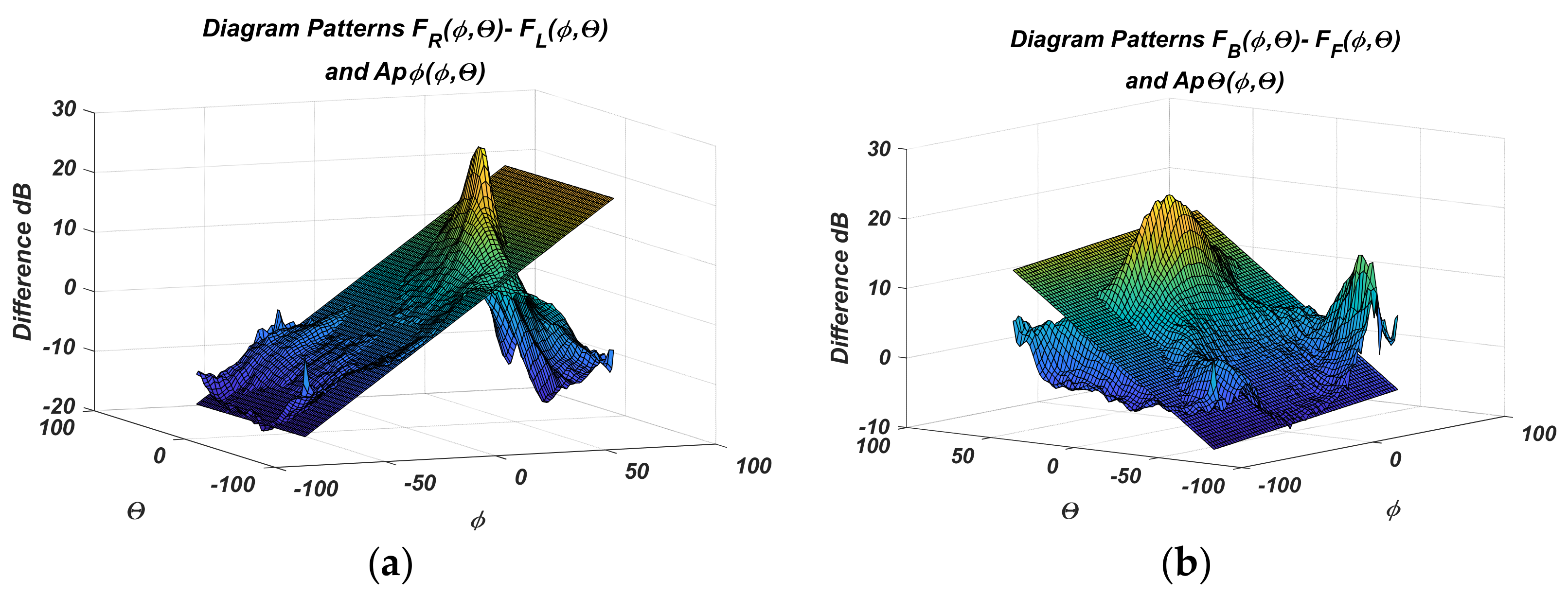
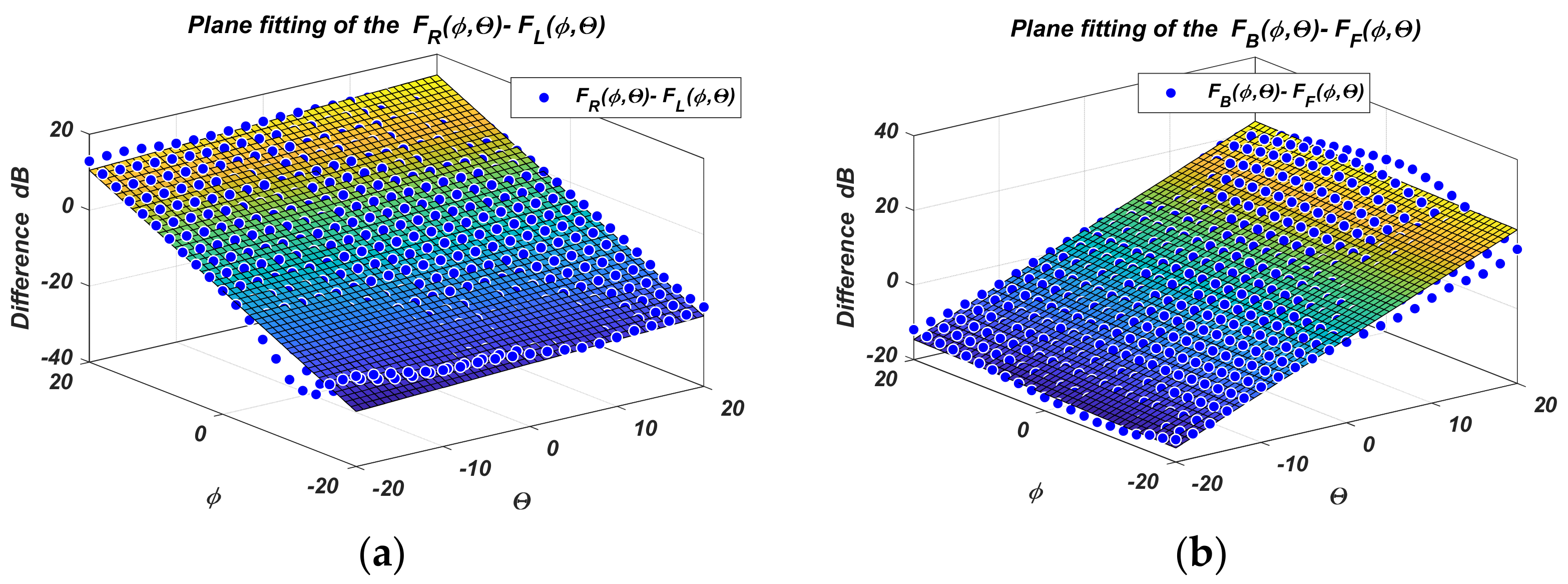
2.1.5. Approximation of Measured Sensor Diagrams
2.1.6. Positioning and Landing Algorithm
- Evaluating the current height hk and step counter k = 0.
- Sequentially switching the sensor diagrams for each k and measuring the received power.
- With the measured powers , the angular coordinates of UAV are calculated on the basis of (6, 9). Here is the zero state of the antenna array diagram, and respectively are the measured powers in diagrams with deviations +20°, −20° along the x-axis, and respectively, , +20°, −20° along the y-axis;
- Calculating the Cartesian coordinates with Equation (1).
- Kalman filtration and discrete PI controller. It is applied to minimize the mean square error of the estimation of the angular coordinates . When setting filter parameters, the sensor error estimate shown in the next section is used. The deviation of the UAV from the coordinate system coincides with the error function of the PI controller, and the position correction command is formed by:where are the integral and proportional coefficients of the PI controller. Here the height is not subject to filtration because it relies on the built-in processing in the UAV control system.
- Sending command to the UAV to change position in-plane (x0y) with the calculated by: и ;
- Decreasing the height hk = hk + Δh and check if hk < hmin. hmin is the minimum height to which the vehicle changes its vertical position during landing. It is selected depending on the characteristics of the UAV but cannot be less than the limit for the antenna’s far-field. For example, for the antennas selected above, hmin ≥ 1 m.
- If not, a command to the vehicle to change h is transmitted.
- Increasing the counter k = k + 1. A pause for a specific time, the UAV needs to be set to the new position. This time depends on the UAV flight characteristics and is consistent with the speed of correction and landing.
- Iterative execution from step 2 onwards.
- If yes, end the algorithm a landing command is transmitted.
3. Results
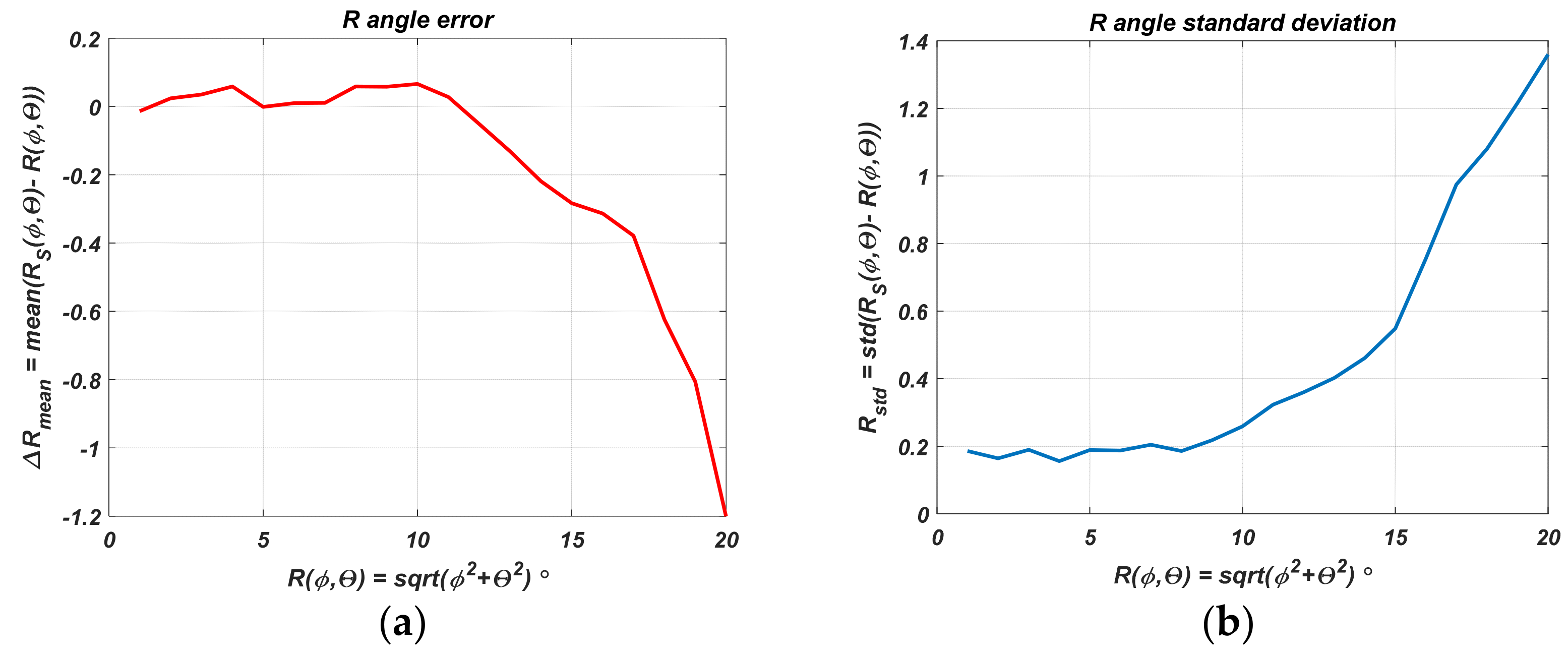
3.1. Assessment of the Approximation and Positioning Error
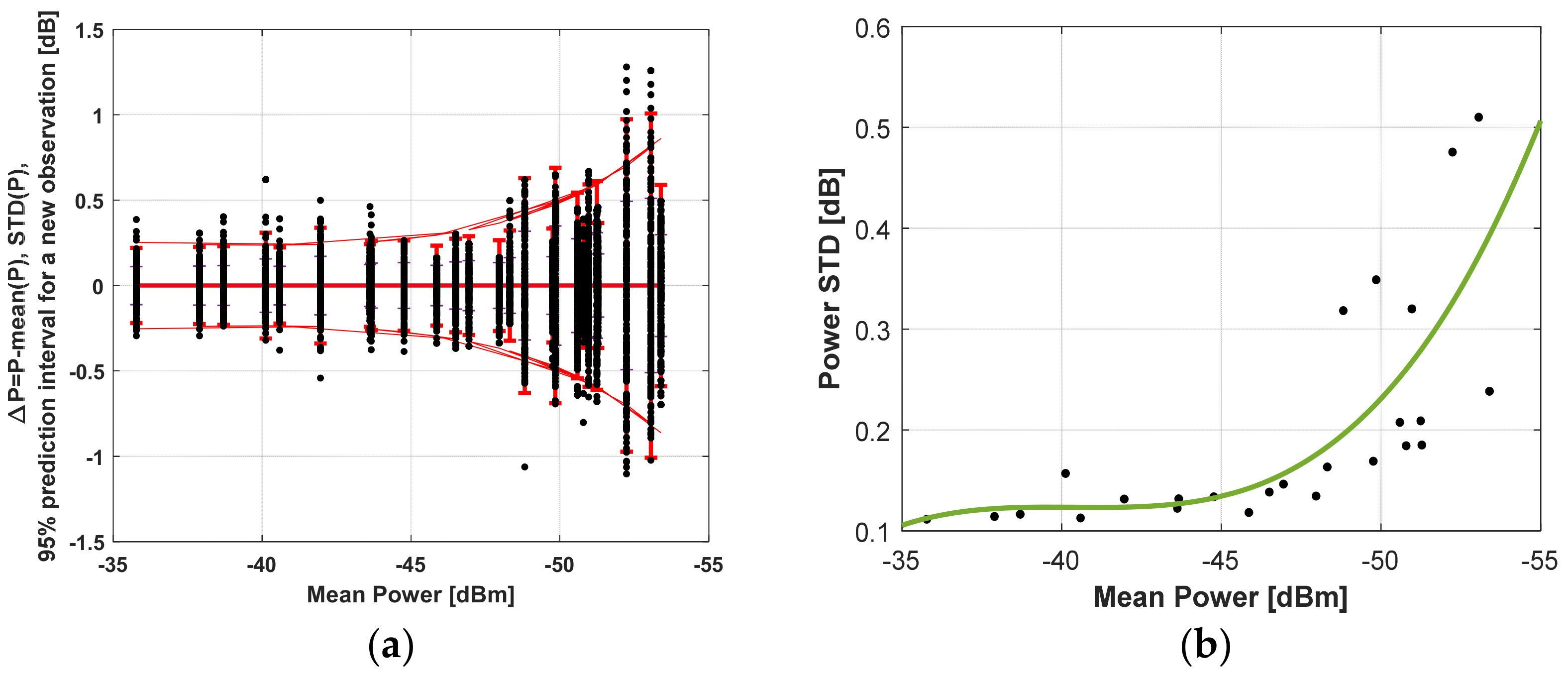
3.2. Statistical Evaluation of the Impact of Power Measurement Noise and Coordinate Estimation
- The standard deviation increases with decreasing received power, respectively, with increasing distance. Up to −45 dBm, it does not change and is of the order of 0.11 dB. The error is primarily determined at a small distance by quantization noise, switching noise, white thermal noise, and receiver noise figure.
- At longer distances, multipath propagation and Rice fading are manifested, and therefore an increase in the standard deviation is observed. The reason for this is also that the PAA diagrams have side lobes.
- The prediction interval for a 95% probability of hitting each new measured power value is related to the absolute error. It is ±0.21 dB for a small distance. The power difference characteristic deviation for the heaviest case gives ±0.37 dB. The value transformed by (9) into angular deviation is ±0.41°. For a distance of 6 m, the object coordinates deviation is 4 cm, and for 1 m, the deviation is 7 mm. At 40 m, the interval is ±0.86 dB, giving a 0.44 m offset of the coordinates from the centrum.
- The obtained standard deviation results can be used for the Kalman filter parameters tuning.
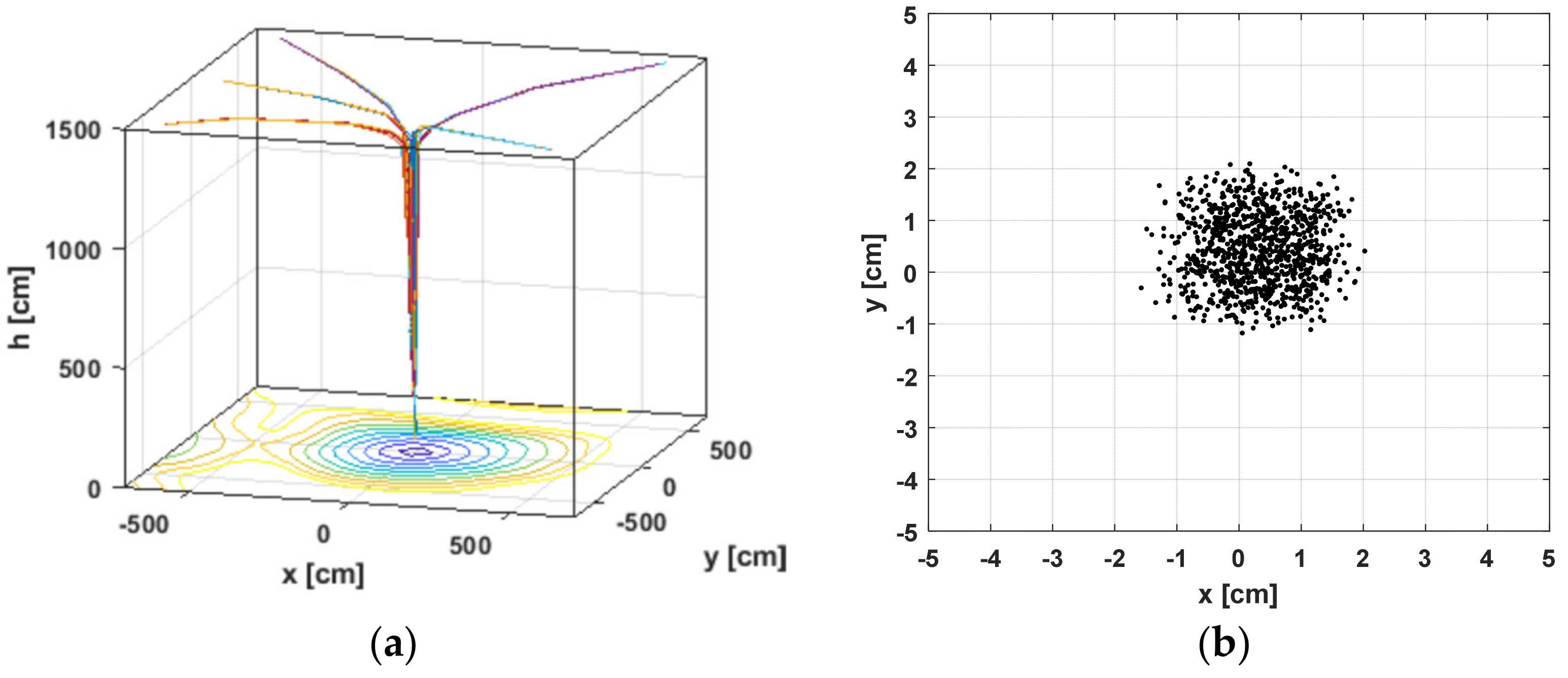
3.3. The Landing Algorithm Simulation Results
| Start High ho [m] | Power Standard Deviation [dB] | x,y Coordinates Standard Deviation by hmin = 1 m |
|---|---|---|
| 15 | 0.14 | 0.72 cm |
| 45 | 0.45 | 1.26 cm |
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E. Using unmanned aerial vehicles (UAVs) as mobile sensing platforms (MSPs) for disaster response, civil security and public safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef]
- Lizárraga, M.; Dobrokhodov, V.; Kaminer, I. Implementación de un Sistema de Control para Recuperación Autónoma de un Vehiculo Aéreo no Tripulado (UAV). In Proceedings of the International Conference on Mechatronics, Niagara Falls, ON, Canada, 20 July–1 August 2005. [Google Scholar]
- Andreev, K.; Georgi, S. Flight safety sensor and auto-landing system of unmanned aerial system. Int. J. Reason.-Based Intell. Syst. 2020, 12, 170–178. [Google Scholar] [CrossRef]
- Lee, D.; Park, W.; Nam, W. Autonomous Landing of Micro Unmanned Aerial Vehicles with Landing-Assistive Platform and Robust Spherical Object Detection. Appl. Sci. 2021, 11, 8555. [Google Scholar] [CrossRef]
- Fumio, O.; Osaragi, K.; Otani, H. Taking-Off and Landing Target Instrument and Automatic Taking-Off and Landing System. U.S. Patent No. 9,020,666, 28 April 2015. [Google Scholar]
- Fumio, O.; Osaragi, K.; Anai, T.; Otani, H. Automatic Taking-Off and Landing System. U.S. Patent No. 8,630,755, 14 January 2014. [Google Scholar]
- Desta, E.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo-Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar]
- Xiaowei, S.; Chang, R.; Ding, Y. Pseudo-monopulse tracking method for low profile mobile satellite antenna system. AEU-Int. J. Electron. Commun. 2019, 101, 160–167. [Google Scholar]
- Gawronski, W.; Craparo, E.M. Antenna scanning techniques for estimation of spacecraft position. IEEE Antennas Propag. Mag. 2002, 44, 38–45. [Google Scholar] [CrossRef]
- Chui, C.K.; Chen, G. Kalman Filtering; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Mao, G.; Drake, S.; Anderson, B.D.O. Design of an extended kalman filter for uav localization. In Proceedings of the 2007 Information, Decision and Control Conference, Adelaide, Australia, 12–14 February 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Zhao, J.; Gao, F.; Wu, Q.; Jin, S.; Wu, Y.; Jia, W. Beam tracking for UAV mounted SatCom on-the-move with massive antenna array. IEEE J. Sel. Areas Commun. 2018, 36, 363–375. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to radar. In Radar Handbook 2; McGraw-Hill: New York, NY, USA, 1962. [Google Scholar]
- Souza, A.L.; Ishihara, J.Y.; Ferreira, H.C.; Borges, R.A.; Borges, G.A. Antenna pointing system for satellite tracking based on Kalman filtering and model predictive control techniques. Adv. Space Res. 2016, 58, 2328–2340. [Google Scholar] [CrossRef]
- Gawronski, W. Control and pointing challenges of antennas and telescopes. In Proceedings of the 2005, American Control Conference, Portland, Oregon, USA, 8–10 June 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Iliev, I.; Nachev, I. An Automatic System for Antenna Radiation Pattern Measurement. In Proceedings of the 2020 55th International Scientific Conference on Information, Communication and Energy Systems and Technologies (ICEST), Niš, Serbia, 10–12 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Martinez, W.L.; Martinez, A.R. Computational Statistics Handbook with MATLAB; Chapman and Hall/CRC: Boca Raton, FL, USA, 2001. [Google Scholar]
- Makarov, S.N.; Iyer, V.; Kulkarni, S.; Best, S.R. Antenna and EM Modeling with MATLAB Antenna Toolbox; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]


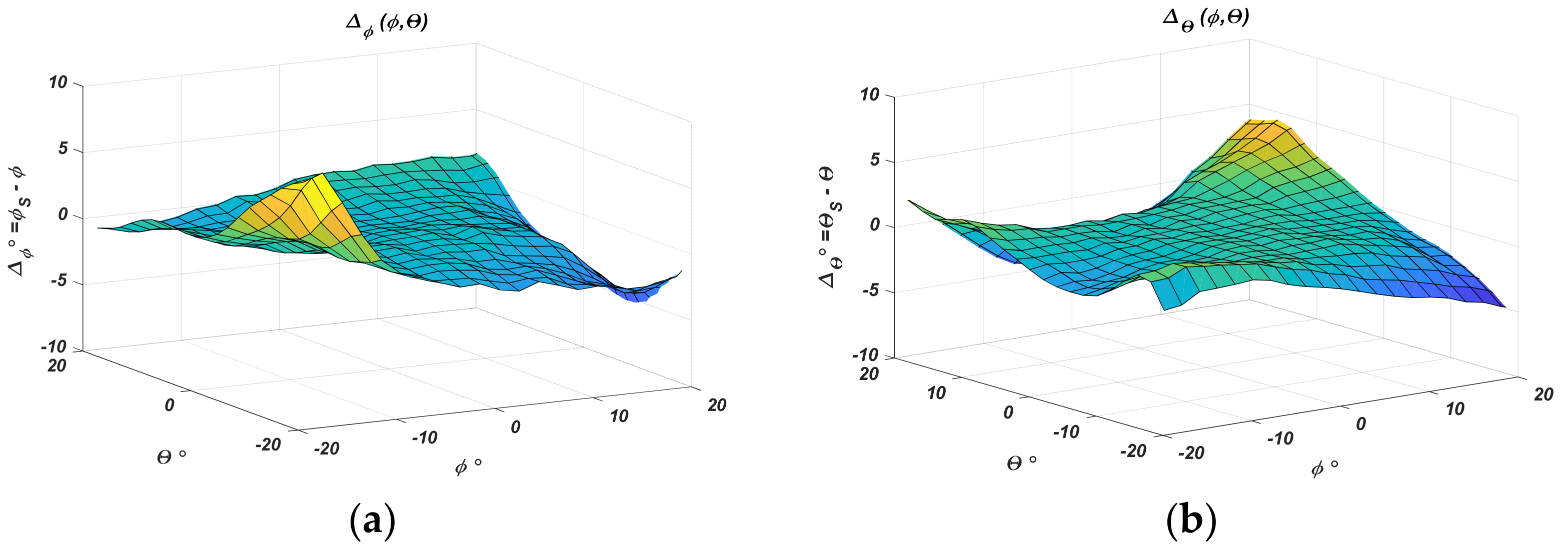



| ϕ, θ [deg] | Δϕ, Δθ [deg] | Δx, Δy [m], h = 1 m |
|---|---|---|
| 0°, 0° | 0.11°, 0.12° | 0.0019, 0.0021 |
| −20 to 20°, −20 to 20° | max 8°, max 5.8° | 0.14, 0.10 |
| −15 to 15°, −15 to 15° | max 2°, max 2° | 0.035, 0.035 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iliev, I.; Nachev, I. Automatic Landing of Unmanned Aerial Vehicles via Wireless Positioning System with Pseudo-Conical Scanning. Sensors 2022, 22, 6451. https://doi.org/10.3390/s22176451
Iliev I, Nachev I. Automatic Landing of Unmanned Aerial Vehicles via Wireless Positioning System with Pseudo-Conical Scanning. Sensors. 2022; 22(17):6451. https://doi.org/10.3390/s22176451
Chicago/Turabian StyleIliev, Ilia, and Ivaylo Nachev. 2022. "Automatic Landing of Unmanned Aerial Vehicles via Wireless Positioning System with Pseudo-Conical Scanning" Sensors 22, no. 17: 6451. https://doi.org/10.3390/s22176451
APA StyleIliev, I., & Nachev, I. (2022). Automatic Landing of Unmanned Aerial Vehicles via Wireless Positioning System with Pseudo-Conical Scanning. Sensors, 22(17), 6451. https://doi.org/10.3390/s22176451