

Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts





Abstract
:1. Introduction
- How to model and to account for the interactions of CAVs with HDVs on roundabouts where operations at capacity are going to be reached?
- How to revise the values of the model parameters so as to improve the agreement of the simulated data with the capacity target values calculated under different proportions of CAVs in traffic?
- How to analyse the change in driving behaviour and how to assess the potential benefits of greater proportions of CAVs on roundabouts?
2. Literature Review and Related Research
2.1. The Transition towards Connected and Automated Vehicles
2.2. Consumer Attitudes toward the Acceptability of Automated Driving Systems
2.3. Simulation Modelling of CAVs on Roundabouts
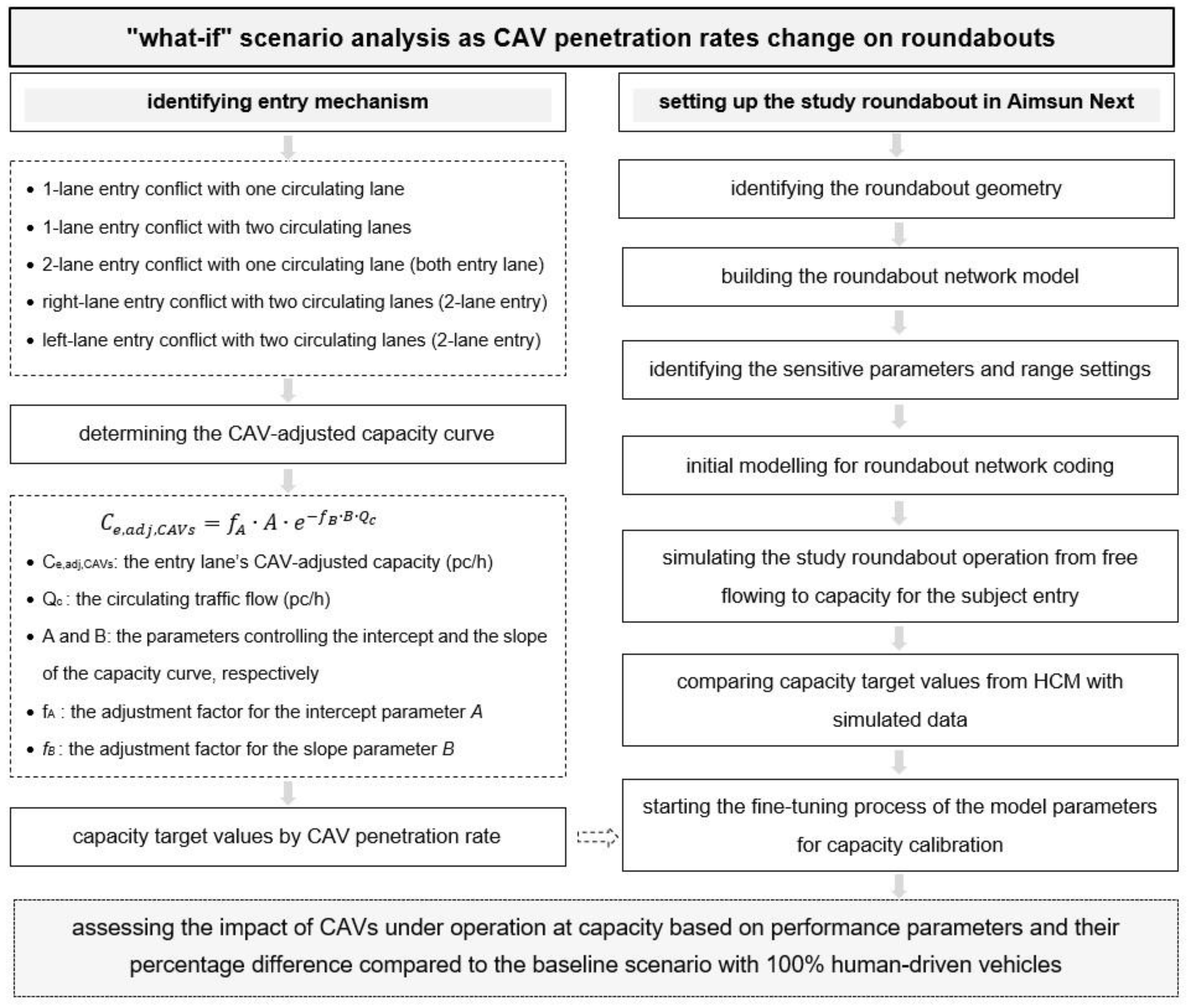
3. Materials and Methods
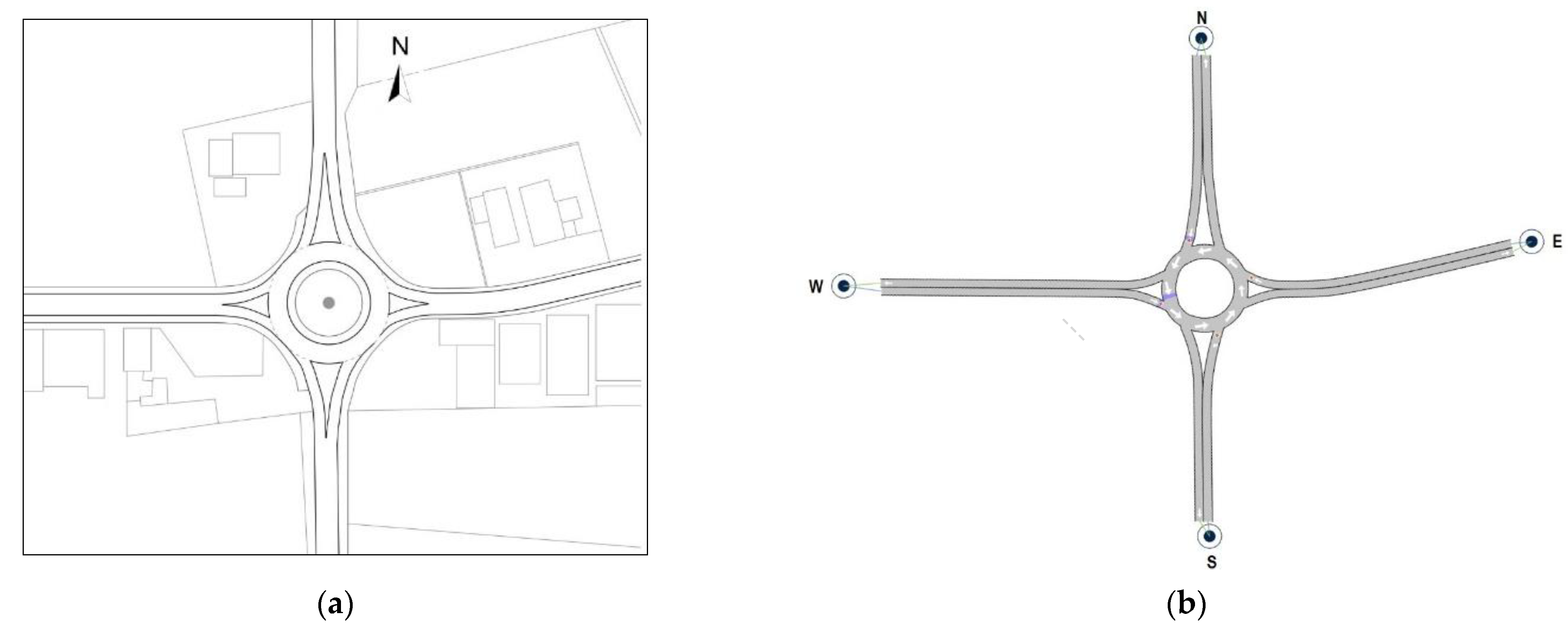
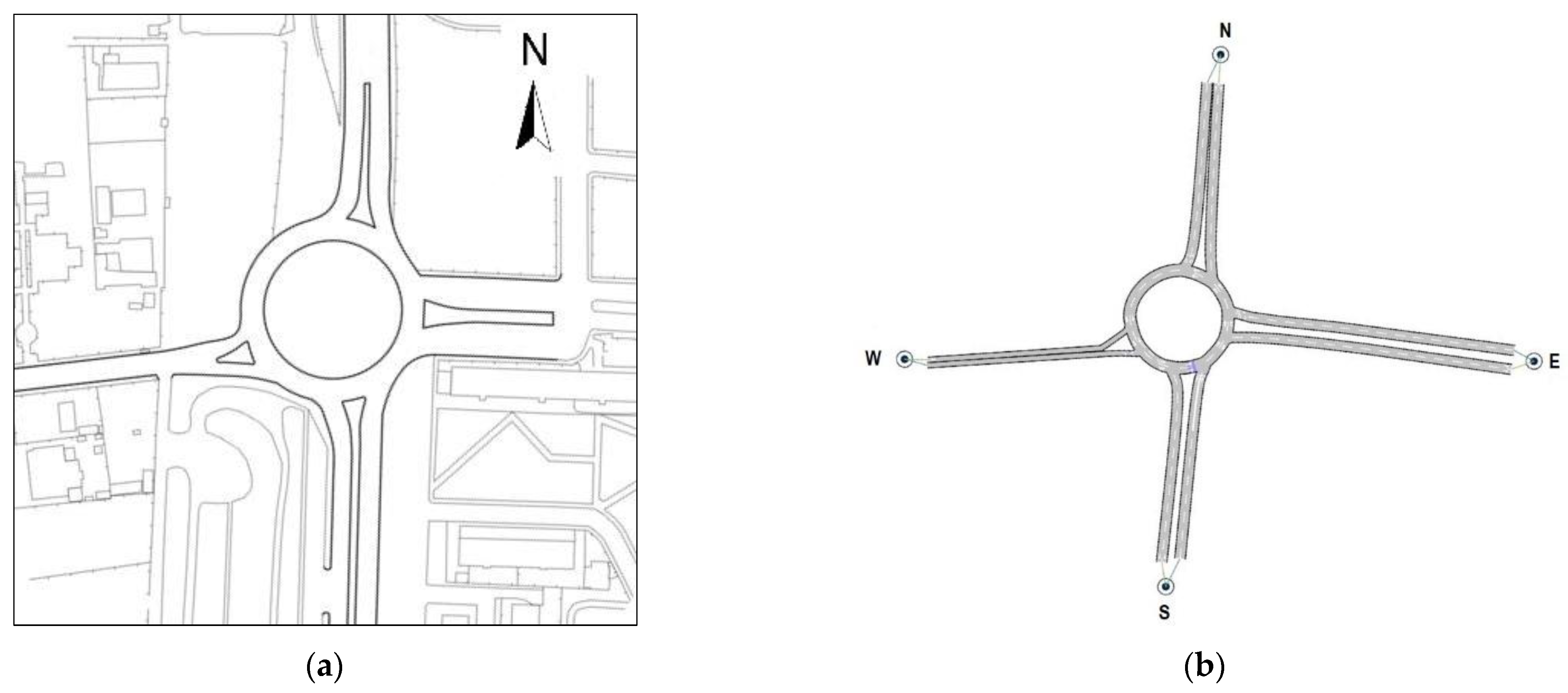
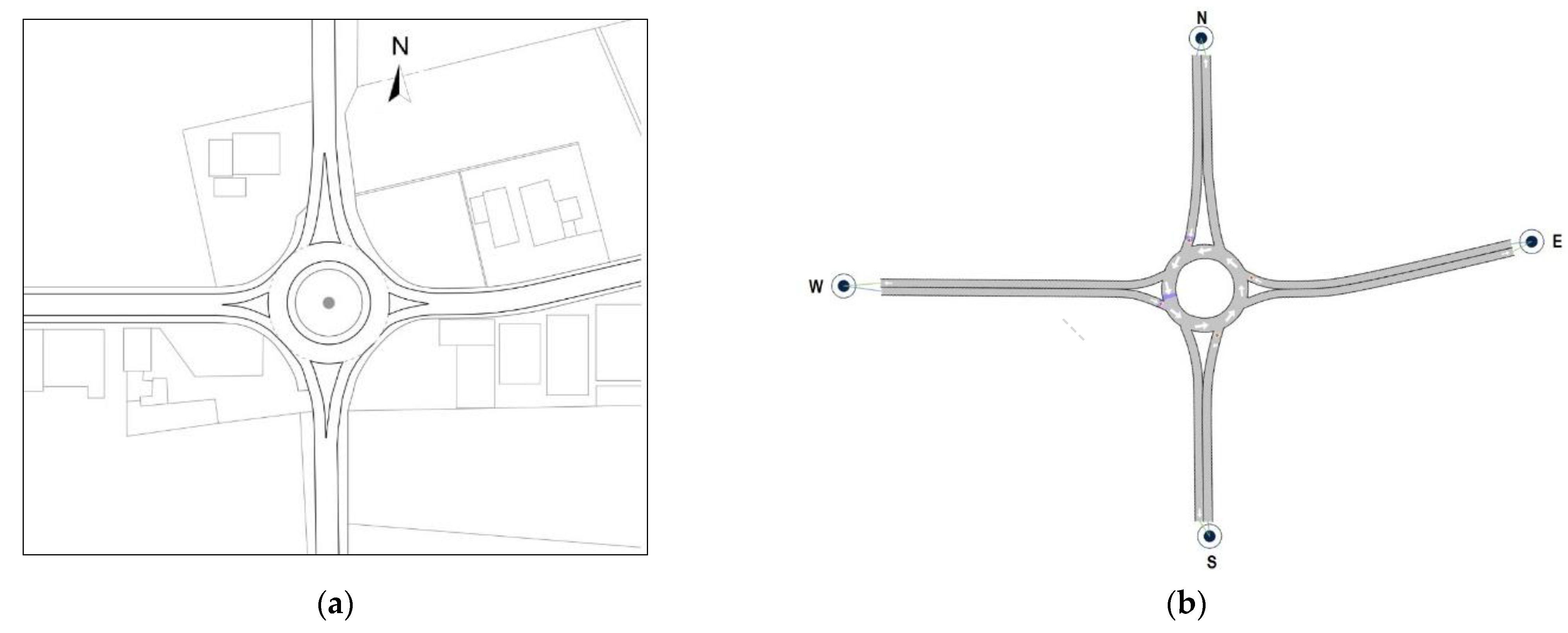
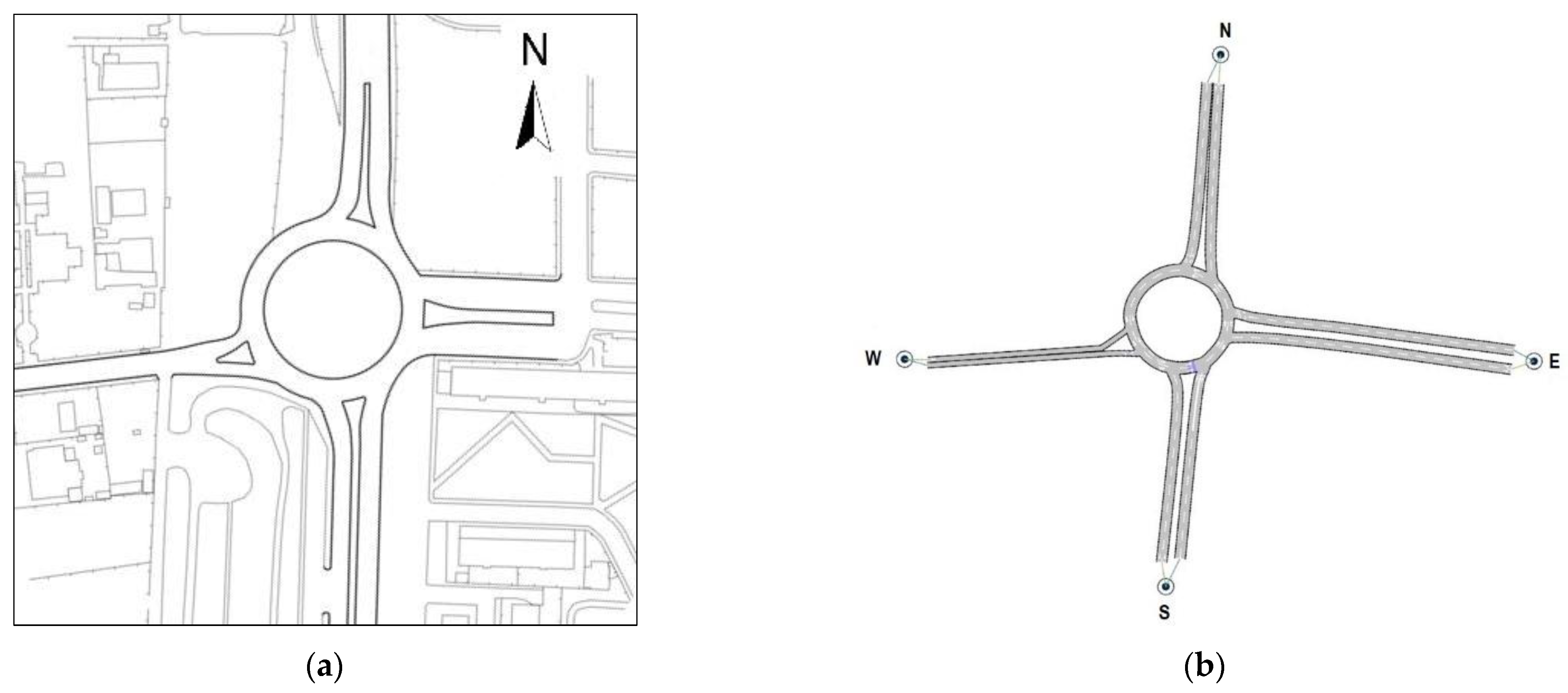
3.1. Setting Up Roundabouts in the Aimsun Next Environment
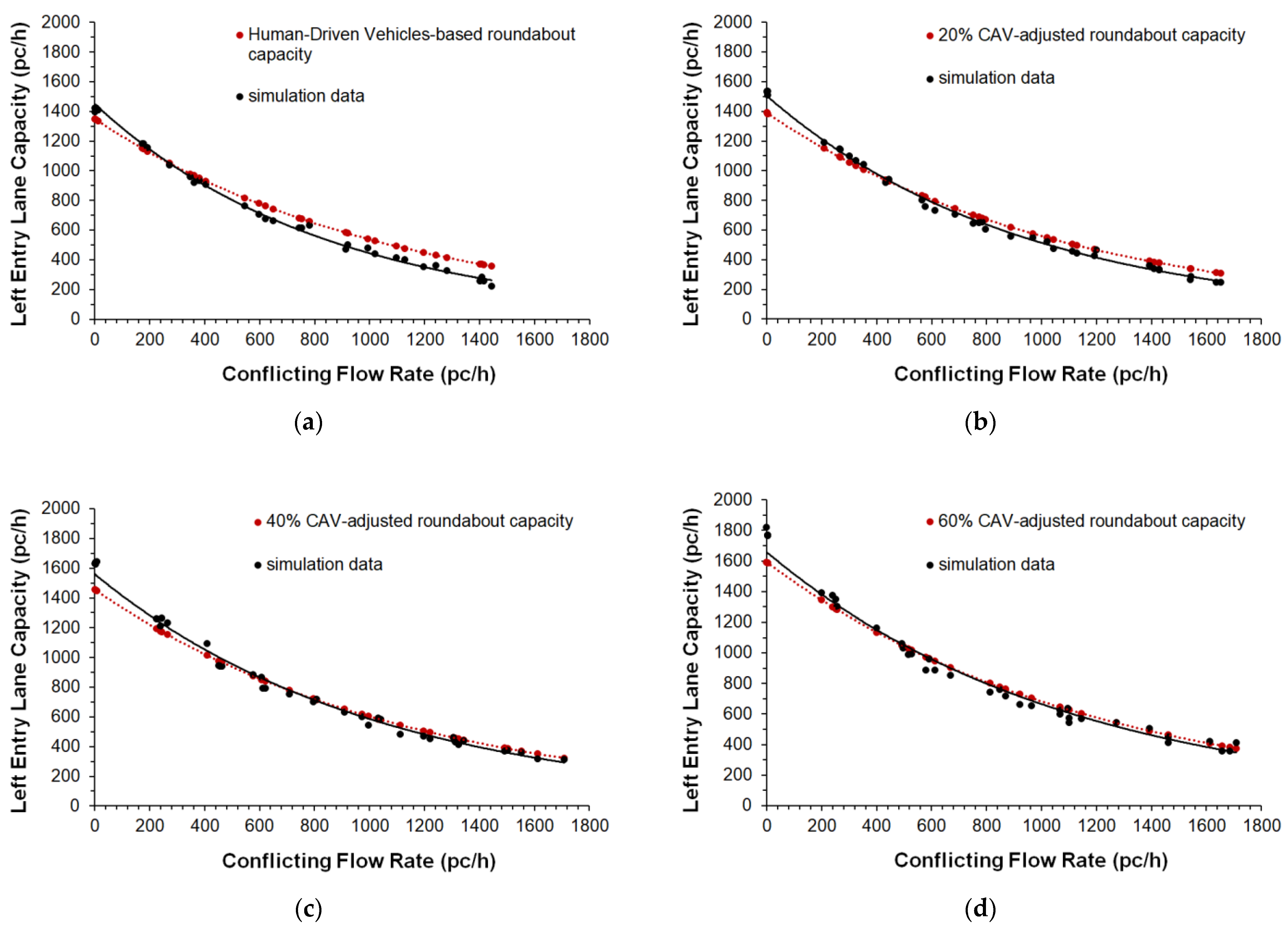
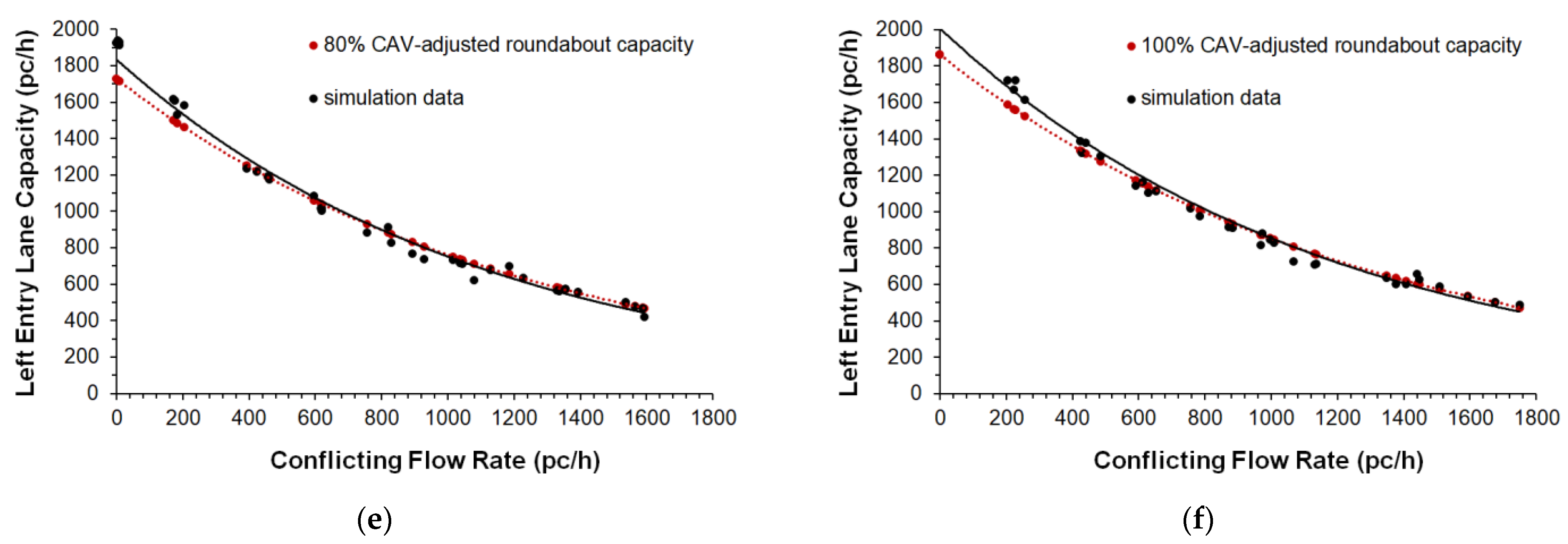
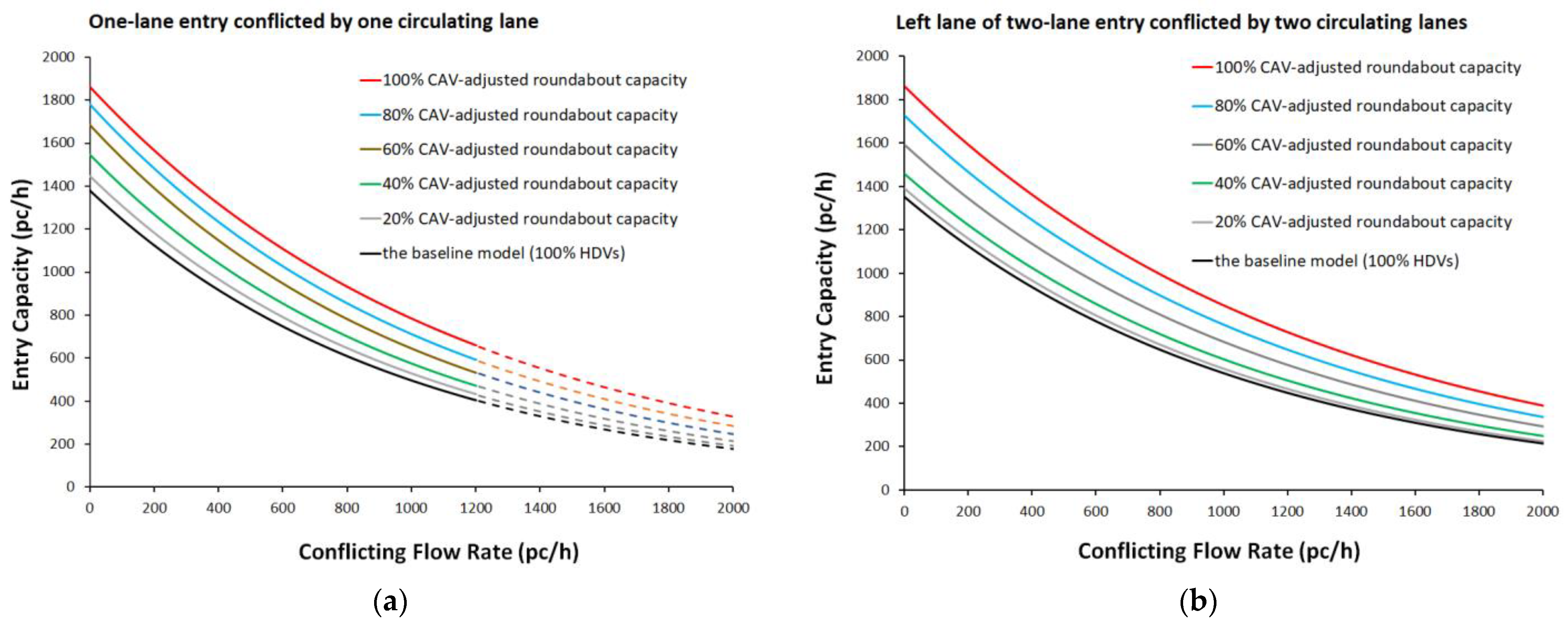
3.2. The Capacity Target Values in the “What-If” Scenarios Analysis
3.3. Fine-Tuning the Model Parameters with Effects on CAVs
- The driver reaction time or the time it takes a driver to react to speed changes in the preceding vehicle; lower reaction time means higher capacity, so that the vehicles can drive closer to the preceding vehicles and find gaps more easily to enter the network. Higher capacity occurs with lower reaction time where the vehicle can drive closer to the preceding vehicle, accepts and finds gaps more easily to enter the network;
- The speed limit acceptance that can be interpreted as the “level of goodness” of the drivers or the degree of acceptance of the speed limit: when it is greater than 1 means that the vehicle will take as maximum speed on a given section a value greater than the speed limit, while when it is lower than 1 means that the vehicle will use a lower speed limit;
- The gap or the time between the rear bumper of a vehicle and the front bumper of the following vehicle. This parameter can be fine-tuned to override the headway between the vehicles: the default value of 0.00 s implies that the headway between the vehicles, measured from the front bumper to the front bumper, will be used, while any other value will force a larger headway. Since the deceleration component of the car-following model is affected by the constraints imposed by the preceding vehicle when it tries to reach the desired speed, this parameter can limit the deceleration component before updating the position and the speed of the leader vehicle respect to the follower vehicle.
- The maximum acceleration that measures the attainable maximum value by a vehicle in any circumstance; according to [75], a higher value than the default one provides better vehicular performance;
- The safety margin factor that determines when a vehicle can move at a priority junction: a higher value than the default one means more cautious driving behaviour (i.e., larger headway), otherwise, more assertive driving is expected. The adjusted value of the safety margin employed here is consistent with the recommendations by Aimsun Next where this parameter can be adjusted for a specific maneuvre to reflect the road geometry under examination [25];
- In the deceleration component of the car-following model, the sensitivity factor enables the follower to estimate the deceleration of the leader. Aimsun Next [25] allows the analyst to adjust the vehicle headway distribution to reflect cautious driving (i.e., larger headways), otherwise assertive driving (i.e., shorter headways). Thus, a value of the sensitivity factor greater than 1.00 reflects cautious driving, while a value of the sensitivity factor below 1.00 reflects assertive driving (see Table 2). The value that we chose expressed a trade-off to simulate the changes in driving behaviour or the interactions among different vehicles to evaluate the CAV driving skills in mixed traffic conditions.
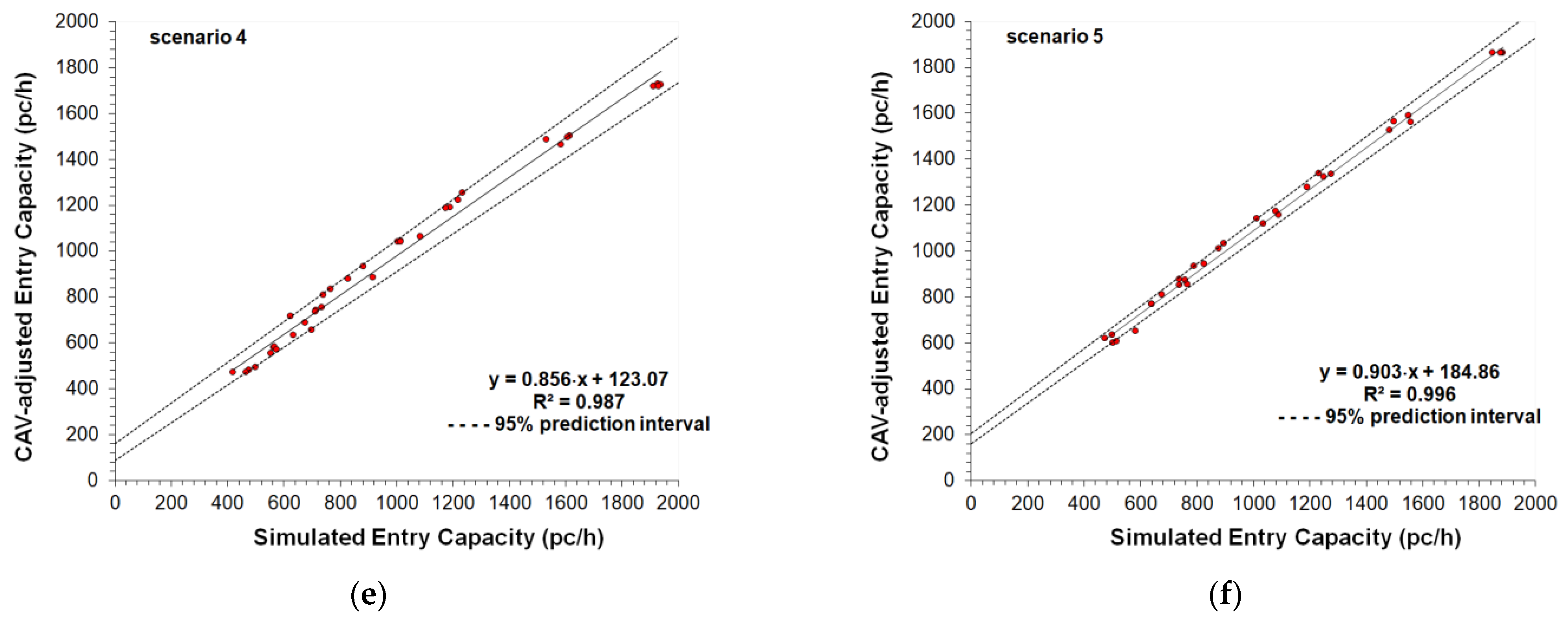
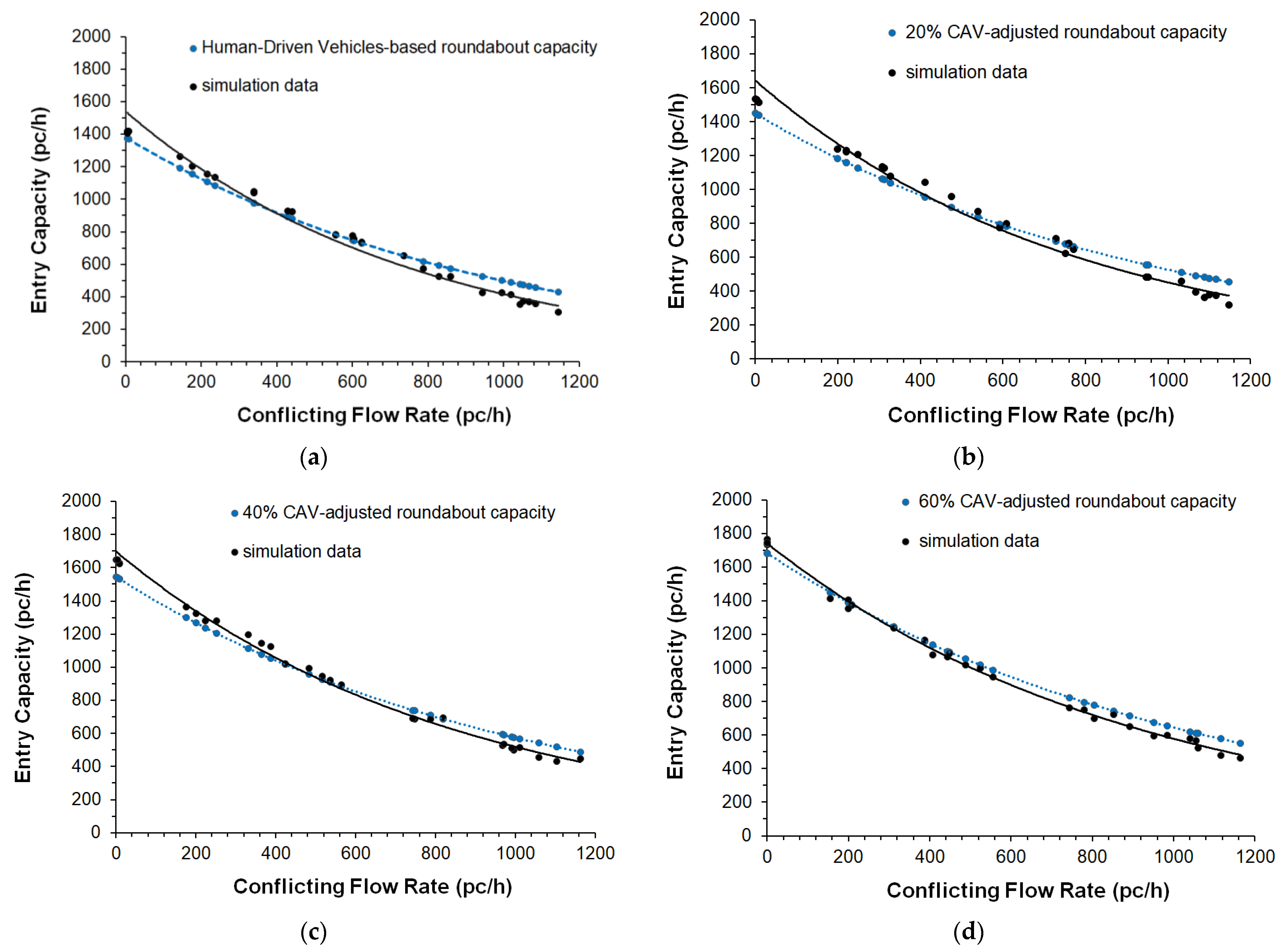
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Academies of Sciences, Engineering, and Medicine. Roundabouts: An Informational Guide, 2nd ed.; The National Academies Press: Washington, DC, USA, 2010. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Highway Capacity Manual 7th Edition: A Guide for Multimodal Mobility Analysis; The National Academies Press: Washington, DC, USA, 2022. [Google Scholar] [CrossRef]
- Jiang, Q.; Schroeder, B.; Ma, J.; Rodegerdts, L.; Cesme, B. Developing Highway Capacity Manual Capacity Adjustment Factors for Connected and Automated Traffic on Roundabouts. J. Transp. Eng. Part A Syst. 2022, 148, 04022014. [Google Scholar] [CrossRef]
- Zohdy, I.H.; Rakha, H.A. Intersection Management via Vehicle Connectivity: The Intersection Cooperative Adaptive Cruise Control System Concept. J. Intell. Transp. Systems. Technol. Plan. Oper. 2014, 20, 17–32. [Google Scholar] [CrossRef]
- Abdelkader, G.; Elgazzar, K.; Khamis, A. Connected Vehicles: Technology Review, State of the Art, Challenges and Opportunities. Sensors 2021, 21, 7712. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Zöldy, M. An Investigation of Autonomous Vehicle Roundabout Situation. Period. Polytech. Transp. Eng. 2020, 48, 236–241. [Google Scholar] [CrossRef]
- Younis, O.; Moayeri, N. Employing cyber-physical systems: Dynamic traffic light control at road intersections. IEEE Internet Things J. 2017, 4, 2286–2296. [Google Scholar] [CrossRef]
- Qiao, J.; Zhang, D.; de Jonge, D. Virtual Roundabout Protocol for Autonomous Vehicles. In Advances in Artificial Intelligence. AI 2018. Lecture Notes in Computer Science; Mitrovic, T., Xue, B., Li, X., Eds.; Springer: Cham, Switzerland, 2018; Volume 11320, pp. 773–782. [Google Scholar]
- SAE J3016; Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. The Society of Automotive Engineers International: Warrendale, PA, USA, 2014.
- Lu, Z.; Happee, R.; Cabrall, C.D.D.; Kyriakidis, M.; de Winter, J.C.F. Human factors of transitions in automated driving: A general framework and literature survey. Transp. Res. Part F Traffic Psychol. Behav. 2016, 43, 183–198. [Google Scholar] [CrossRef]
- Pérez, J.; Milanés, V.; de Pedro, T.; Vlacic, L. Autonomous driving manoeuvres in urban road traffic environment: A study on roundabouts. IFAC Proc. Vol. 2011, 44, 13795–13800. [Google Scholar] [CrossRef]
- Brost, M.; Deniz, Ö.; Österle, I.; Ulrich, C.; Senzeybek, M.; Hahn, R.; Schmid, S. Energy Consumption of Connected and Automated Vehicles. In Book Electric, Hybrid, and Fuel Cell Vehicles, Encyclopedia of Sustainability Science and Technology, 2nd ed.; Elgowainy, A., Ed.; Springer: New York, NY, USA, 2021; pp. 216–224. [Google Scholar]
- Parkin, J. Urban networks and autonomous vehicles. In Cities for Driverless Vehicles, 1st ed.; ICE Publishing: London, UK, 2021; Volume 1, pp. 119–139. [Google Scholar]
- Malik, S.; Khan, M.A.; El-Sayed, H. Collaborative Autonomous Driving. A Survey of Solution Approaches and Future Challenges. Sensors 2021, 21, 3783. [Google Scholar] [CrossRef]
- JD Power. Press Release. 2013 U.S. Automotive Emerging Technologies Study. Available online: https://www.jdpower.com/business/press-releases/2013-us-automotive-emerging-technologies-study (accessed on 8 July 2022).
- Kyriakidis, M.; Happee, R.; de Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Virdi, N.; Grzybowska, H.; Waller, S.T.; Dixit, V. A safety assessment of mixed fleets with Connected and Autonomous Vehicles using the Surrogate Safety Assessment Module. Accid. Anal. Prev. 2019, 131, 95–111. [Google Scholar] [CrossRef]
- Lee, D.; Hess, D.J. Regulations for on-road testing of connected and automated vehicles: Assessing the potential for global safety harmonization. Transp. Res. Part A Policy Pract. 2020, 136, 85–98. [Google Scholar] [CrossRef]
- García Cuenca, L.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Autonomous Driving in Roundabout Maneuvers Using Reinforcement Learning with Q-Learning. Electronics 2019, 8, 1536. [Google Scholar] [CrossRef]
- García Cuenca, L.; Sanchez-Soriano, J.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Machine Learning Techniques for Undertaking Roundabouts in Autonomous Driving. Sensors 2019, 19, 2386. [Google Scholar] [CrossRef] [PubMed]
- Raju, N.; Farah, H. Evolution of Traffic Microsimulation and Its Use for Modeling Connected and Automated Vehicles. J. Adv. Transp. 2021, 2021, 2444363. [Google Scholar] [CrossRef]
- Ha, P.; Chen, S.; Du, R.; Dong, J.; Li, Y.; Labi, S. Vehicle Connectivity and Automation: A Sibling Relationship. Front. Built Environ. 2020, 6, 590036. [Google Scholar] [CrossRef]
- Jones, S. Cooperative Adaptive Cruise Control: Human Factors Analysis; Publication No. FHWA-HRT-13-045; Federal Highway Administration: Washington, DC, USA, 2013.
- Barceló, J. Fundamentals of Traffic Simulation; Springer: London, UK, 2010. [Google Scholar]
- Aimsun Next. Version 20 Dynamic Simulator User Manual; TSS-Transport Simulation Systems: Barcelona, Spain, 2020. [Google Scholar]
- National Highway Traffic Safety Administration. Preliminary Statement of Policy Concerning Automated Vehicles; National Highway Traffic Safety Administration: Washington, DC, USA, 2013.
- United Kingdom Department for Transport (DfT). The Pathway to Driverless Cars: A Detailed Review of Regulations for Automated Vehicle Technologies; United Kingdom Department for Transport: London, UK, 2015.
- UK Parliamentary Office of Science and Technology (POST). Autonomous Road Vehicles; POSTNOTE. No. 443; UK Parliamentary Office of Science and Technology (POST): London, UK, 2013. [Google Scholar]
- BASt (Federal Highway Research Institute of Germany). Legal Consequences of an Increase in Vehicle Automation; BASt-Report f83 (Part 1); Federal Highway Research Institute of Germany: Bergisch Gladbach, Germany, 2012. [Google Scholar]
- Tahir, M.N.; Leviäkangas, P.; Katz, M. Connected Vehicles: V2V and V2I Road Weather and Traffic Communication Using Cellular Technologies. Sensors 2022, 22, 1142. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wu, G.; Barth, M.J. A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2884–2891. [Google Scholar] [CrossRef]
- Taiebat, M.; Brown, A.L.; Safford, H.R.; Qu, S.; Xu, M. A Review on Energy, Environmental, and Sustainability Implications of Connected and Automated Vehicles. Environ. Sci. Technol. 2018, 52, 11449–11465. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Connected and Autonomous Vehicles and Infrastructures: A Literature Review. Int. J. Pavement Res. Technol. 2021, 1–21. [Google Scholar] [CrossRef]
- Noussan, M.; Tagliapietra, S. The effect of digitalization in the energy consumption of passenger transport: An analysis of future scenarios for Europe. J. Clean. Prod. 2020, 258, 120926. [Google Scholar] [CrossRef]
- Young, M.S.; Stanton, N.A.; Harris, D. Driving automation: Learning from aviation about design philosophies. Int. J. Veh. Des. 2007, 45, 323–338. [Google Scholar] [CrossRef]
- Christoph, M.; Cleij, D.; Ahlström, C.; Bakker, B.; Beggiato, M.; Borowsky, A.; Van Nes, C.N. Mediating between Human Driver and Automation: State-Of-The Art and Knowledge Gaps; D1.1 of the H2020 Project MEDIATOR; SWOV: Leidschendam, The Netherlands, 2019. [Google Scholar]
- Chan, C.Y. Advancements, prospects, and impacts of automated driving systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- Elliott, D.; Keen, W.; Miao, L. Recent advances in connected and automated vehicles. J. Traffic Transp. Eng. 2019, 6, 109–131. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D.; Xu, Z.; Wang, P.; Wang, G. The Roles of Car Following and Lane Changing Drivers’ Anticipations during Vehicle Inserting Process: A Structural Equation Model Approach. J. Adv. Transp. 2018, 2018, 6372861. [Google Scholar] [CrossRef]
- Strömberg, H.; Ramos, É.M.S.; Karlsson, M.A.; Johansson, M.; Ekman, F.; Bligård, L.O.; Bergstad, C.J. A future without drivers? Comparing users’, urban planners’ and developers’ assumptions, hopes, and concerns about autonomous vehicles. Eur. Transp. Res. Rev. 2021, 13, 44. [Google Scholar] [CrossRef]
- McCool, S. CAV Public Acceptability Dialogue: Engagement Report; Department for Transport, Centre for Connected & Autonomous Vehicles, UK Research and Innovations: London, UK, 2019; p. 76.
- Schoettle, B.; Michael Sivak, M. Public Opinion about Self-Driving Vehicles in China, India, Japan, the U.S., the U.K., and Australia; Report No. UMTRI-2014-30, The University of Michigan Sustainable Worldwide Transportation; The University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Giuffrè, T.; Di Dio, S. Smart transportation as a driver of transition: Big data management, behavioral change and the shift to automated vehicles. In Smart Cities: Technologies, Challenges and Future Prospects; Barton, A., Manning, R., Eds.; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2017; Volume 1, pp. 29–94. [Google Scholar]
- Paddeu, D.; Tsouros, I.; Parkhurst, G.; Polydoropoulou, A.; Shergold, I. A study of users’ preferences after a brief exposure in a Shared Autonomous Vehicle (SAV). Transp. Res. Procedia 2021, 52, 533–540. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.W. Analysis of consumer attitudes towards autonomous, connected, and electric vehicles: A survey in China. Res. Transp. Econ. 2020, 80, 100828. [Google Scholar] [CrossRef]
- Benleulmi, A.Z.; Ramdani, B. Behavioural intention to use fully autonomous vehicles: Instrumental, symbolic, and affective motives. Transp. Res. Part F Traffic Psychol. Behav. 2022, 86, 226–237. [Google Scholar] [CrossRef]
- Zou, X.; Logan, D.B.; Vu, L.H. Modeling public acceptance of private autonomous vehicles: Value of time and motion sickness viewpoints. Transp. Res. Part C Emerg. Technol. 2022, 137, 103548. [Google Scholar] [CrossRef]
- Lehtonen, E.; Malin, F.; Louw, T.; Lee, Y.M.; Itkonen, T.; Innamaa, S. Why would people want to travel more with automated cars? Transp. Res. Part F Traffic Psychol. Behav. 2022, 89, 143–154. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Single-Lane Roundabout Manager under Fully Automated Vehicle Environment. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 439–449. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Elefteriadou, L. Traffic management with autonomous and connected vehicles at single-lane roundabouts. Transp. Res. Part C Emerg. Technol. 2021, 125, 102964. [Google Scholar] [CrossRef]
- Anagnostopoulos, A.; Kehagia, F. CAVs and roundabouts: Research on traffic impacts and design elements. Transp. Res. Procedia 2020, 49, 83–94. [Google Scholar] [CrossRef]
- Deluka Tibljaš, A.; Giuffre, T.; Surdonja, S.; Trubia, S. Introduction of Autonomous Vehicles: Roundabouts Design and Safety Performance Evaluation. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Olia, A.; Razavi, S.; Abdulhai, B.; Abdelgawad, H. Traffic capacity implications of automated vehicles mixed with regular vehicles. J. Intell. Transp. Syst. Technol. Plan. Oper. 2018, 22, 244–262. [Google Scholar] [CrossRef]
- Martin-Gasulla, M.; Sukennik, P.; Lohmiller, J. Investigation of the impact on throughput of connected autonomous vehicles with headway based on the leading vehicle type. Transp. Res. Rec. 2019, 2673, 617–626. [Google Scholar] [CrossRef]
- Chouhan, A.P.; Banda, G.; Jothibasu, K. A cooperative algorithm for lane sorting of autonomous vehicles. IEEE Access 2020, 8, 88759–88768. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Q. Intersection management for autonomous vehicles with vehicle-to-infrastructure communication. PLoS ONE 2020, 15, e0235644. [Google Scholar]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Fan, W. Exploring the impact of connected and autonomous vehicles on freeway capacity using a revised intelligent driver model. Transp. Plan. Technol. 2020, 43, 279–292. [Google Scholar] [CrossRef]
- Tomas, R.F.; Fernandes, P.; MacEdo, E.; Bandeira, J.M.; Coelho, M.C. Assessing the emission impacts of autonomous vehicles on metropolitan freeways. Transp. Res. Procedia 2020, 47, 617–624. [Google Scholar] [CrossRef]
- Ard, T.; Dollar, R.A.; Vahidi, A.; Zhang, Y.; Karbowski, D. Microsimulation of energy and flow effects from optimal automated driving in mixed traffic. Transp. Res. Part C Emerg. Technol. 2020, 120, 102806. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transp. Res. Part C Emerg. Technol. 2014, 48, 285–300. [Google Scholar] [CrossRef]
- PTV Planung Transport Verkehr AG. PTV VISSIM User Manual; PTV Planung Transport Verkehr AG: Karlsruhe, Germany, 2017. [Google Scholar]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model and Validation: Final Report No. FHWA-HRT-08-051; Federal Highway Administration: Washington, DC, USA, 2008.
- Giuffrè, T.; Granà, A.; Trubia, S. Safety evaluation of turbo-roundabouts with and without internal traffic separations considering autonomous vehicles operation. Sustainability 2021, 13, 8810. [Google Scholar] [CrossRef]
- Nickkar, A.; Lee, Y.J. Evaluation of dedicated lanes for automated vehicles at roundabouts with various flow patterns. In Proceedings of the 98th Transportation Research Board Annual Meeting 2019, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Boualam, O.; Borsos, A.; Koren, C.; Nagy, V. Impact of autonomous vehicles on roundabout capacity. Sustainability 2022, 14, 2203. [Google Scholar] [CrossRef]
- Zhao, L.; Malikopoulos, A.; Torres, J.R. Optimal Control of Connected and Automated Vehicles at Roundabouts: An Investigation in a Mixed-Traffic Environment. IFAC-Paper 2018, 51, 73–78. [Google Scholar] [CrossRef]
- Danesh, A.; Ma, W.; Yu, C.; Hao, R.; Ma, X. Optimal roundabout control under fully connected and automated vehicle environment. IET Intell. Transp. Syst. 2021, 15, 1440–1453. [Google Scholar] [CrossRef]
- Italian Minister of Infrastructure and Transport. Functional and Geometric Standards for Road Intersections; Italian Minister of Infrastructure and Transport: Rome, Italy, 2006.
- Fernandes, P.; Tomás, R.; Acuto, F.; Pascale, A.; Bahmankhah, B.; Guarnaccia, C.; Granà, A.; Coelho, C.C. Impacts of roundabouts in suburban areas on congestion-specific vehicle speed profiles, pollutant and noise emissions: An empirical analysis. Sustain. Cities Soc. 2020, 62, 102386. [Google Scholar] [CrossRef]
- Hollander, Y.; Liu, R. The principles of calibrating traffic microsimulation models. Transportation 2008, 35, 347–362. [Google Scholar] [CrossRef]
- Giuffrè, O.; Granà, A.; Tumminello, M.; Sferlazza, A. Estimation of Passenger Car Equivalents for single-lane roundabouts using a microsimulation-based procedure. Expert Syst. Appl. 2017, 79, 333–347. [Google Scholar] [CrossRef]
- Giuffre, O.; Grana, A.; Tumminello, M.; Sferlazza, A. Capacity-based calculation of passenger car equivalents using traffic simulation at double-lane roundabouts. Simul. Model. Pract. Theory 2018, 81, 11–30. [Google Scholar] [CrossRef]
- Gipps, P.G. A Behavioural Car-Following Model for Computer Simulation. Transp. Res. Part B 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Ma, C.; Yu, C.; Yang, X. Trajectory planning for connected and automated vehicles at isolated signalized intersections under mixed traffic environment. Transp. Res. Part C Emerg. Technol. 2021, 130, 103309. [Google Scholar] [CrossRef]
- Khan, S.M.; Chowdhury, M. Situation-Aware Left-Turning Connected and Automated Vehicle Operation at Signalized Intersections. IEEE Internet Things J. 2021, 8, 13077–13094. [Google Scholar] [CrossRef]
- These Americans Are Just Going Around in Circles. It Helps the Climate. Available online: https://www.nytimes.com/2021/11/20/climate/roundabouts-climate-emissions-driving.html (accessed on 13 July 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Penetration Rate of CAVs (%) | Capacity Adjustment Factors | |||
|---|---|---|---|---|
| Entry Mechanism 1 1 | Entry Mechanism 2 2 | |||
| fA | fB | fA | fB | |
| 0 | 1.00 | 1.00 | 1.00 | 1.00 |
| 20 | 1.05 | 0.99 | 1.03 | 0.99 |
| 40 | 1.12 | 0.97 | 1.08 | 0.96 |
| 60 | 1.22 | 0.94 | 1.18 | 0.92 |
| 80 | 1.29 | 0.90 | 1.28 | 0.89 |
| 100 | 1.35 | 0.85 | 1.38 | 0.85 |
| Model Parameters | Default Values | Fine-Tuned Values | ||||
|---|---|---|---|---|---|---|
| Mean | Dev | Min | Max | HDVs | CAVs | |
| Max desired speed [km/h] | 110 | 10 | 80 | 150 | 50 1 | 50 1 |
| Vehicle length [m] | 4.00 | 0.50 | 3.50 | 4.50 | 4.00 | 4.00 |
| Vehicle width [m] | 2.00 | 0.00 | 2.00 | 2.00 | 2.00 | 2.00 |
| Clearance [m] | 1.00 | 0.30 | 0.50 | 1.50 | 1.00 | 1.00 |
| Lateral clearance [m] | 0.10 | 0.30 | 0.10 | 0.10 | 0.50 | 0.50 |
| Reaction time 2 [s] | 0.80 | - | 0.80 | 0.80 | 0.86 (0.95) 3 | 0.63 |
| Gap [s] | 0.00 | 0.00 | 0.00 | 0.00 | 1.58 (1.33) 3 | 0.00 |
| Speed limit acceptance | 1.10 | 0.10 | 0.90 | 1.30 | 1.00 (0.97) 3 | 1.00 |
| Maximum acceleration [m/s2] | 3.00 | 0.20 | 2.60 | 3.40 | 4.00 | 4.00 |
| Normal deceleration [m/s2] | 4.00 | 0.25 | 3.50 | 4.50 | 4.00 | 4.00 |
| Maximum deceleration [m/s2] | 6.00 | 0.50 | 5.00 | 7.00 | 6.00 | 6.00 |
| Safety Margin Factor | 1.00 | 0.00 | 1.00 | 1.00 | 1.00 | 0.50 |
| Sensitivity Factor | 1.00 | 0.00 | 1.00 | 1.00 | na 4 | 1.00 (0.60) 3 |
| Cooperate in creating a gap 5 | - | - | - | - | na 4 | 0.50 7 |
| Imprudent lane-changing 6 | - | - | - | - | na 4 | yes 7 |
| Headway aggressiveness | 0.00 | 0.00 | −1.00 | 1.00 | na 4 | 0.00 |
| Market Penetration Rates of CAVs [%] | ||||||
|---|---|---|---|---|---|---|
| Capacity (pc/h) | 0 | 20 | 40 | 60 | 80 | 100 |
| μ11 (s.e.) | 774.46 (57.97) | 745.93 (56.58) | 786.75 (58.35) | 881.15 (62.69) | 980.67 (67.64) | 1067.83 (71.40) |
| μ21 (s.e.) | 731.12 (67.97) | 738.00 (66.28) | 799.77 (68.27) | 887.44 (72.47) | 1001.66 (78.52) | 1107.11 (85.92) |
| 95% c.i. 2 | (−135.3, 221.9) | (−165.9, 181.8) | (−192.2, 166.1) | (−197.4, 184.8) | (−227.7, 185.7) | (−262.1, 183.5) |
| t-statistic 3 | 0.50 | 0.10 | 0.15 | 0.10 | 0.20 | 0.35 |
| t-critical | 2.0003 | 1.995 | 1.995 | 1.994 | 1.995 | 1.995 |
| p(α)-value 4 | 0.63 | 0.93 | 0.88 | 0.95 | 0.84 | 0.73 |
| F-statistic 5 | 1.37 | 1.37 | 1.37 | 1.34 | 1.35 | 1.45 |
| F-critical 6 | 1.822 | 1.757 | 1.757 | 1.757 | 1.757 | 1.757 |
| F-prob 7 | 0.38 | 0.35 | 0.36 | 0.40 | 0.38 | 0.28 |
| RMSNE [24] | 0.13 | 0.09 | 0.07 | 0.07 | 0.06 | 0.07 |
| GEH (%) [24] | 91 | 100 | 100 | 97 | 94 | 92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tumminello, M.L.; Macioszek, E.; Granà, A.; Giuffrè, T. Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts. Sensors 2022, 22, 6670. https://doi.org/10.3390/s22176670
Tumminello ML, Macioszek E, Granà A, Giuffrè T. Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts. Sensors. 2022; 22(17):6670. https://doi.org/10.3390/s22176670
Chicago/Turabian StyleTumminello, Maria Luisa, Elżbieta Macioszek, Anna Granà, and Tullio Giuffrè. 2022. "Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts" Sensors 22, no. 17: 6670. https://doi.org/10.3390/s22176670
APA StyleTumminello, M. L., Macioszek, E., Granà, A., & Giuffrè, T. (2022). Simulation-Based Analysis of “What-If” Scenarios with Connected and Automated Vehicles Navigating Roundabouts. Sensors, 22(17), 6670. https://doi.org/10.3390/s22176670