1. Introduction
Since tactile sensation is one of the most important factors when evaluating a consumer product [
1,
2,
3,
4], quantitative evaluation methods for tactile sensation are in high demand in product development. In general, a sensory evaluation test is employed to quantify tactile sensations; however, it requires many subjects to participate in a survey, which is costly and time-consuming. Another issue is that even with the same subject, the results may vary depending on differences in the evaluation environment and physical condition. As an alternative to sensory evaluation tests, tactile estimation using physically acquired quantitative data, or tactile sensing, has attracted significant attention.
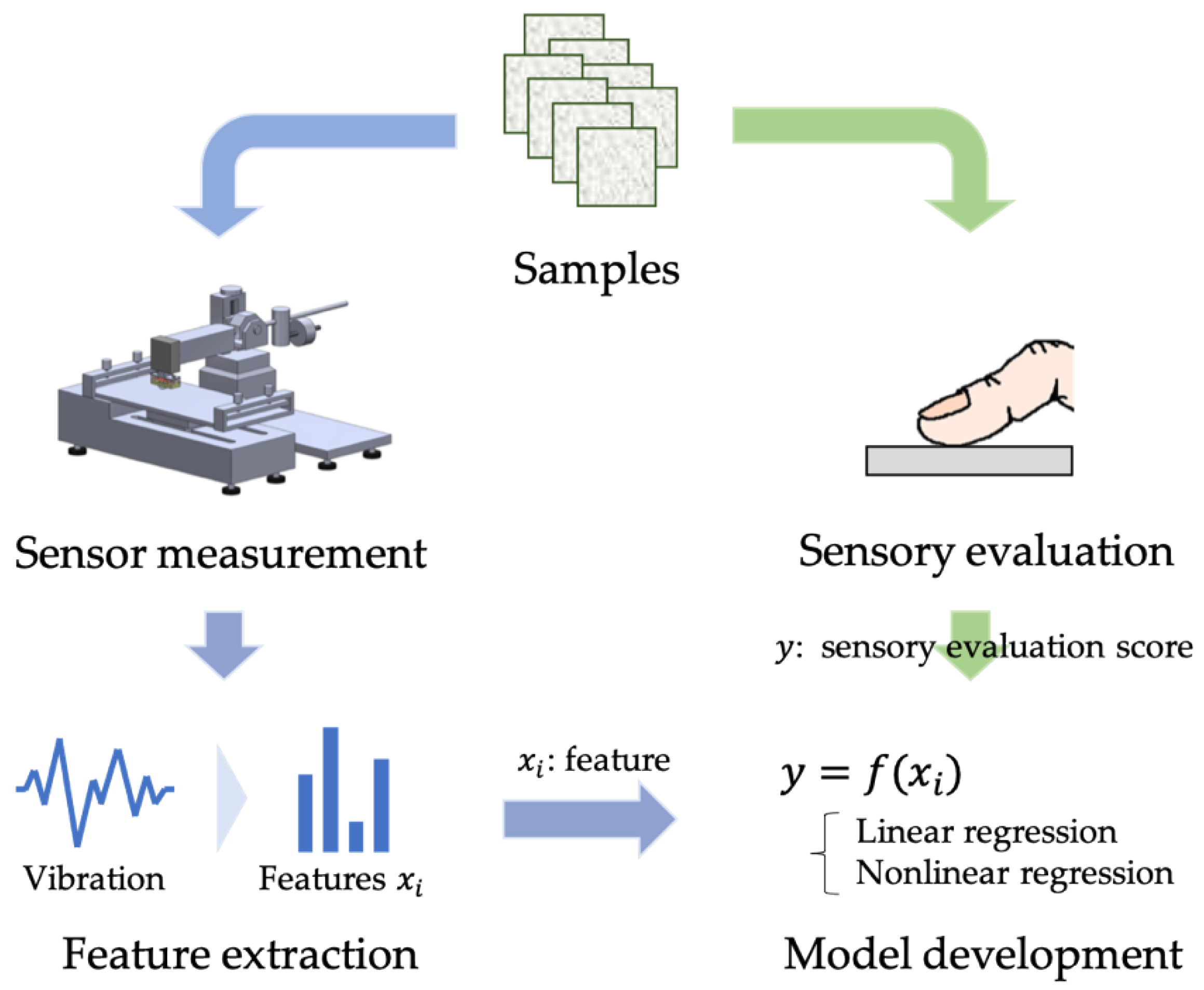
There are two main purposes for using sensory evaluation. The first is the quality control of the product. Since the surface of products should always have a similar texture as it is desired, a classification model may be used to classify the surface textures from the data acquired by the sensor. The other is to understand what kind of tactile sensation the surface of the manufactured product evokes in people at the product design phase, which is a more upstream process. To evaluate the tactile sensation of products, sensory evaluation by a large number of subjects is necessary for generalization, and the cost is prohibitive. The realization of a regression model that accurately estimates tactile evaluation scores by humans from sensor information contributes to the design of low-cost, high-quality products. The classification is a simple task compared to a regression task and has already been addressed in previous studies. On the other hand, few accurate models for estimating human tactile evaluation scores have been reported.
Some previous studies about tactile sensing have focused on developing tactile sensors [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15]. Fishel et al. [
5] developed a tactile sensing finger, BioTac, which can detect force, vibration, and heat transfer. Lin et al. [
6] developed a human skin-inspired, piezoelectric, flexible, multifunctional tactile sensor that can detect and distinguish the magnitudes, positions, and modes of diverse external stimuli, including by slipping, touching, and bending the tactile sensor. Zheng et al. [
7] developed a magnetostrictive tactile sensor based on a Galfenol cantilever. The surface properties, including roughness and slipperiness of an object, can be obtained when the sensor slides on an object’s surface. Most tactile sensor development approaches are based on a robotic strategy, which pays little attention to human perceptibility.
Another approach is to extract meaningful information from vibration data obtained by tracing a simple vibration sensor on an object [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30]. Because the four types of mechanoreceptors in our body have different frequency characteristics [
31,
32,
33], they work as filters for vibration stimulations on the skin. This means that the meaningful information for humans is not the entire vibration data, but is hidden in the vibration data. Previous research [
22,
23,
24,
25,
26,
27,
28,
29,
30] focused on extracting this meaningful information; we believe that this method is quite promising because it uses features focused on the characteristics of mechanoreceptors and can contribute to the elucidation of the human tactile perception mechanisms through an engineering approach. These methods include the use of the neuromorphic encoding [
22,
23,
24,
25] and hand-made features [
26,
27,
28,
29,
30]. As an example of the former method, Gupta et al. [
22] converted the analog vibration data acquired by the fabricated sensor into a spike train using a neural model and encoded the spatiotemporal activation patterns of mechanoreceptors through a gray-level co-occurrence matrix. They showed that the feature is effective in texture classification and robust to changes in tactile velocity. Yi et al. [
23] showed that spike train similarity comparisons using the multi-neuron spike train distance calculated from the vibration data through the neural model were effective in roughness discrimination. These studies suggest the effectiveness of features that take into account the receptive characteristics of mechanoreceptors in texture classification. However, although these studies show high classification accuracy, they use machine leaning models; thus, it is not clear which features contribute to the results and how. Furthermore, we believe that it is necessary to go beyond texture classification and estimate tactile sensation in order to make it useful for product development.
In contrast, as an example of calculating hand-made features from vibration data, Okuyama et al. [
26] found a high correlation between the power spectral density of the receptive frequency band of the mechanoreceptor calculated from the vibration data and the evaluation of hair touch feeling. Asaga et al. [
27] calculated features from vibration data using a vibration detection threshold of mechanoreceptors and showed that they correlated with tactile factors obtained from sensory evaluation. Although these studies are clear and straightforward about which explanatory variables contribute to tactile sensation, they only employed linear models. In other words, they do not take into account the nonlinearity of the human perceptive mechanism [
34,
35,
36] in the process of tactile estimation. Another previous study has shown that humans perform nonlinear information conversions in two parts of the tactile perception process: one is at the physical interaction between an object and the skin, which has tactile receptors just underneath, and the other is in the brain’s perceptual system where the receptors fire information that is converted into tactile recognition [
34]. In particular, neurophysiological studies have revealed that there is no linear relationship between the neural firing from the receptors and the subjective sensation [
36], suggesting the importance in performing a nonlinear transformation that takes into account not only the receptive characteristics of mechanoreceptors, but also the brain’s nonlinear perceptual nature. To push the tactile sensing approach forward with the mere basic knowledge to extract feature quantities to a practical level, it is important to show how features can be used in the tactile estimation process, taking into account nonlinearities.
This study aims to show how features based on the characteristics of mechanoreceptors, together with an extension of the feature extraction method, contribute to tactile sensation while introducing nonlinearity into the model by taking into account the nonlinearity of the human tactile perception mechanism.
4. Discussion
As shown in
Table 3, the B-
n models, in which the features were extracted by the proposed method, had the lowest error among all PCs. This implies that considering the combination of firing receptors improves the accuracy of the tactile estimation. As can be seen, the linear regression model (B-1) is effective only for PC2 in Cluster 2, whereas the nonlinear models (B-2, B-3, B-4) are effective for the other PCs. In other words, these results suggest the effectiveness of considering nonlinear models. When the tactile sensation was estimated by the method of a previous study [
27], that is, when only the A-1 models were constructed, the mean error of all five PCs was 0.337. In contrast, when both linear and nonlinear models are considered using the features proposed in this study, the average error (for the models shown in bold in
Table 3) is 0.190. This is a 43.8% smaller error than that using the A-1 models. These results suggest the effectiveness of building a nonlinear model between the features and the subjective sensory quantities, focusing on nonlinear transformations in the brain from neural firing information to tactile perception. Since the materials used in this study were limited, we believe that we can construct a more versatile model that can estimate a wide range of tactile sensations by building models for different materials and evaluating the differences between them in the future.
Table 4 indicates that the regression equations constructed for PC2 in Cluster 1 and PC3 in Cluster 2 were insignificant, with a significance probability of 5%. In conjunction with the results in
Table 3, we can see that the errors of the two models are relatively large (more than 0.3), although they are smaller than those of the previously reported models. Measuring any additional physical quantities may improve the estimation of these tactile sensations.
In the following, we will examine which features effectively explain PC1 in Cluster 1 and PC1/PC2 in Cluster 2, for which statistically significant regression equations were constructed (
p < 0.05).
Table 5 shows the standard regression coefficients,
β’, and their
p-values for each variable. PC2 in Cluster 2, where the linear model was effective, had evaluation words with high principal component loadings such as “Slippery” and “Rough”, as shown in
Table 2. This implies that the roughness represented by PC2 in Cluster 2 was perceived. Furthermore, we found that the logarithmic model was effective for PC1 in both Cluster 1 and Cluster 2. Both principal components have “Smooth,” “Sticky,” “Pasty,” “Feel friction-drag,” and “Sleek” as the evaluation words with an absolute value of principal component loadings of 0.5 or higher. They are thought to represent similar tactile sensations, such as smoothness. Thus, the results imply that we do not perceive vibration stimuli linearly but logarithmically when perceiving smoothness regardless of the cluster. Contrastingly, PC2 in Cluster 1 and PC3 in Cluster 2, which represent similar tactile sensations, were effectively modeled by different types of models: the interaction model and polynomial model, respectively. This difference may be due to the different perceiving nature of each cluster. Therefore, to make the most of the extracted features in tactile estimation, it is necessary to combine different types of models for different PCs or evaluation words.
5. Conclusions
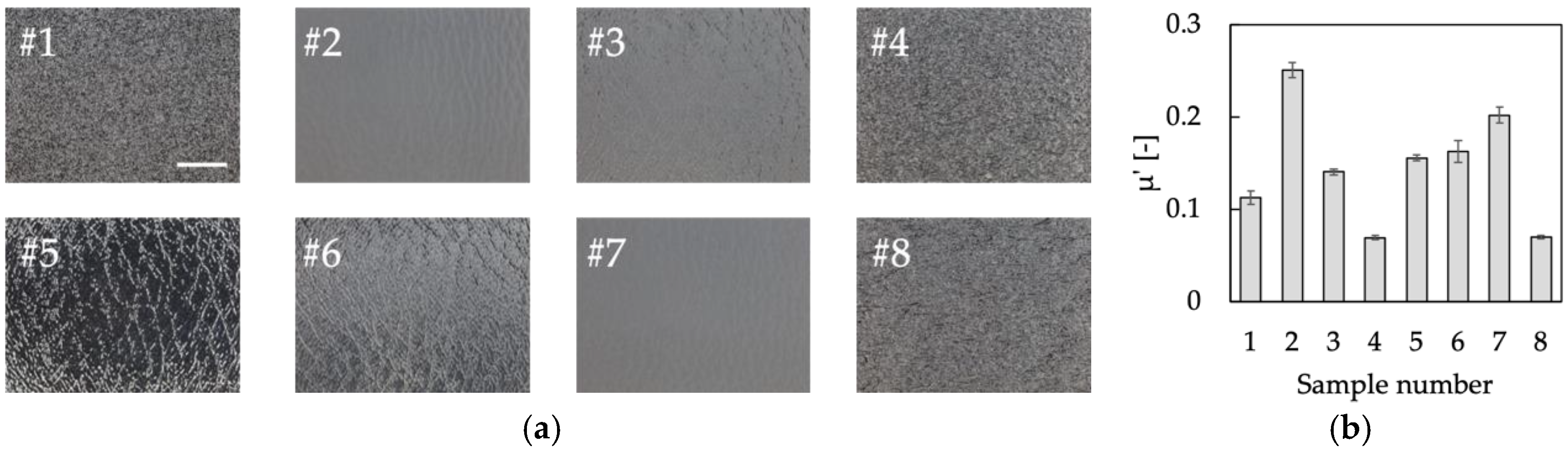
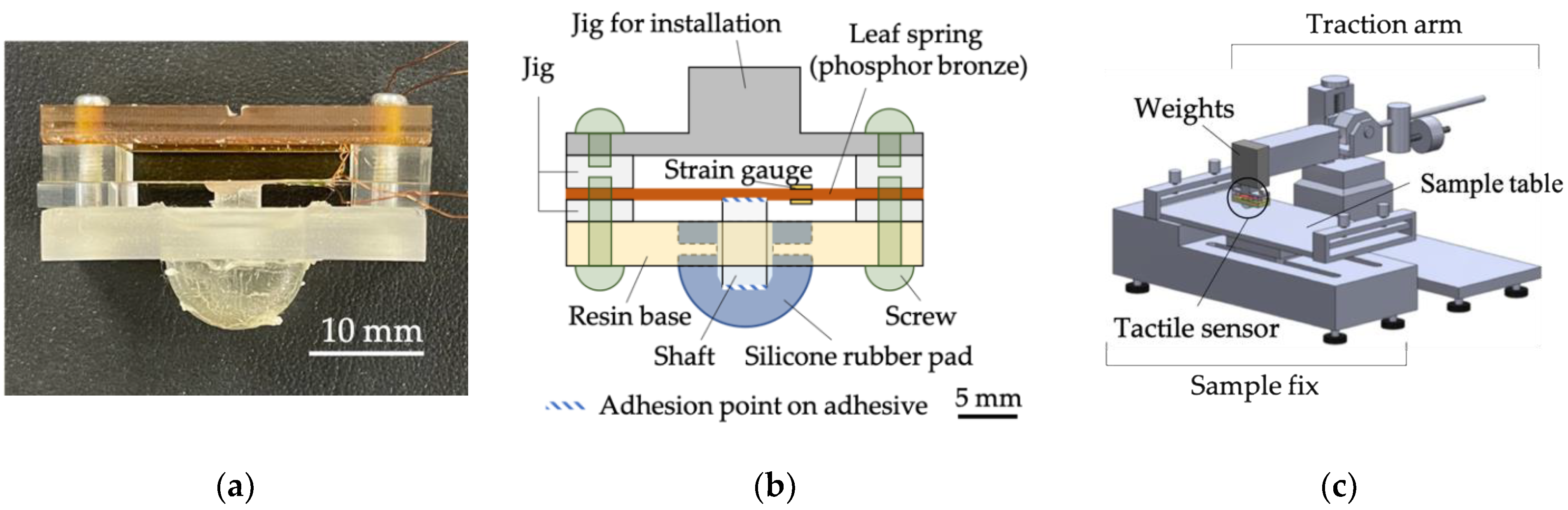
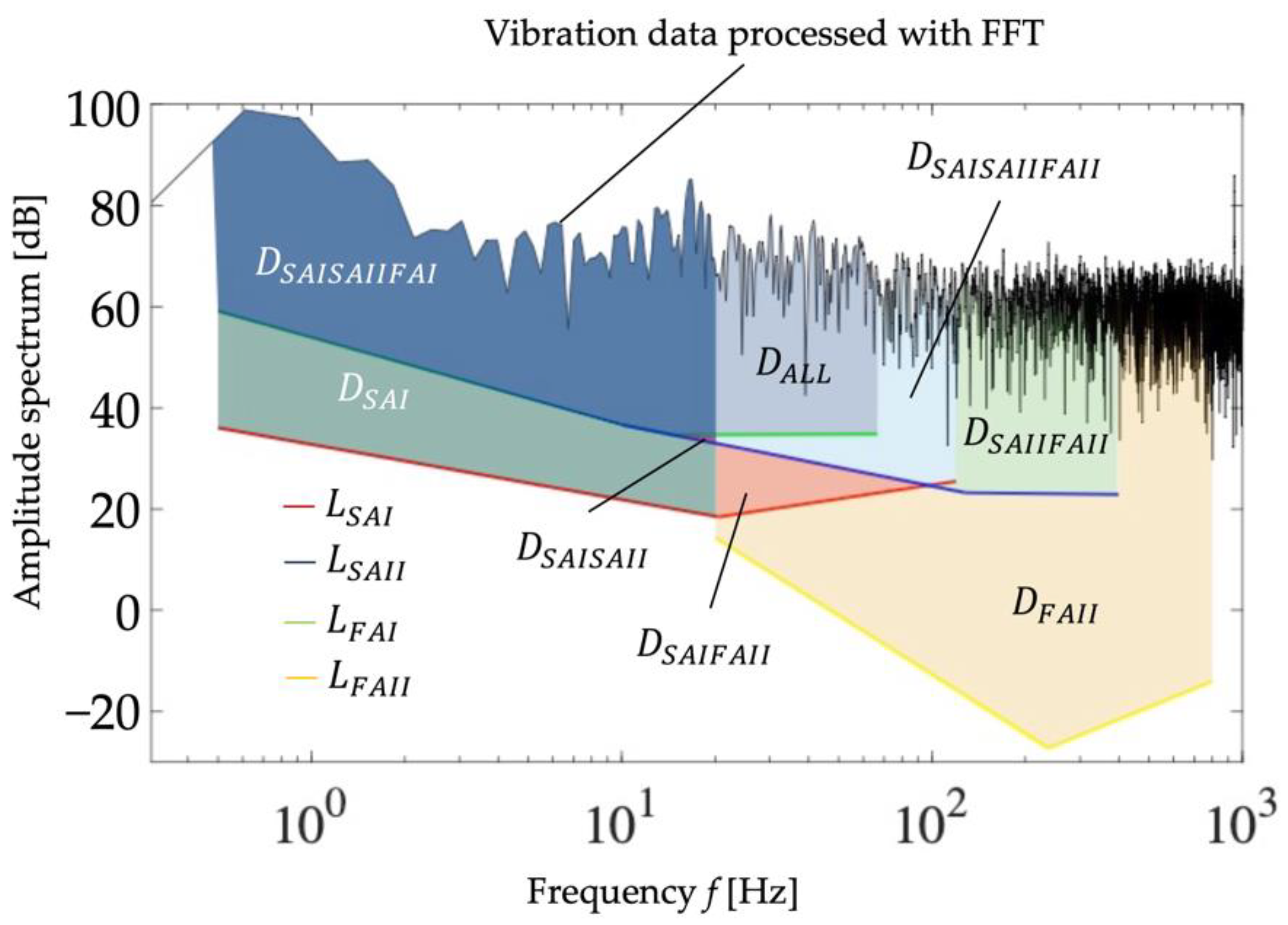
As an alternative to sensory evaluation, estimating human tactile evaluation scores from information acquired by sensors is necessary for the development of products to improve additional values. However, few accurate models for estimating tactile sensation have been reported, and it is necessary to develop an accurate model based on the human tactile perception mechanism. For this purpose, we developed a tactile sensing system capable of detecting vibrations while a sensor runs over a sample. From the vibration obtained, we proposed methods to estimate the firing values of mechanoreceptors focusing on the simultaneous firing of multiple mechanoreceptors. In addition, we conducted sensory evaluations to obtain the sample scores for different evaluation words and extracted principal components for the tactile sensation of samples for the cluster divided by the response tendency. Then, the relationship between the extracted features and tactile evaluation scores was modeled by linear and nonlinear regressions based on the human tactile perception mechanism. The best model was determined by comparing the estimation errors. In conclusion, the results suggest the effectiveness of the feature extraction method proposed in this study and the reduction of error by considering nonlinear models. The results suggest that the proposed nonlinear model improves the average estimation error by 43.8% compared with the previously reported linear model. In addition, the obtained regression equations reveal the physical quantities that contribute to the estimation of smoothness and roughness. In contrast, the p-value of some models is not small enough for quantitative tactile estimation. The appropriateness of the conclusion is limited to similar plastic samples since this study only employs plastic plates. As a future task, we expect to improve the tactile estimation by measuring not only vibration, but also other physical properties such as heat flux that may vary depending on different materials.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}