
Remove Artifacts from a Single-Channel EEG Based on VMD and SOBI


Abstract
:1. Introduction
2. Methods
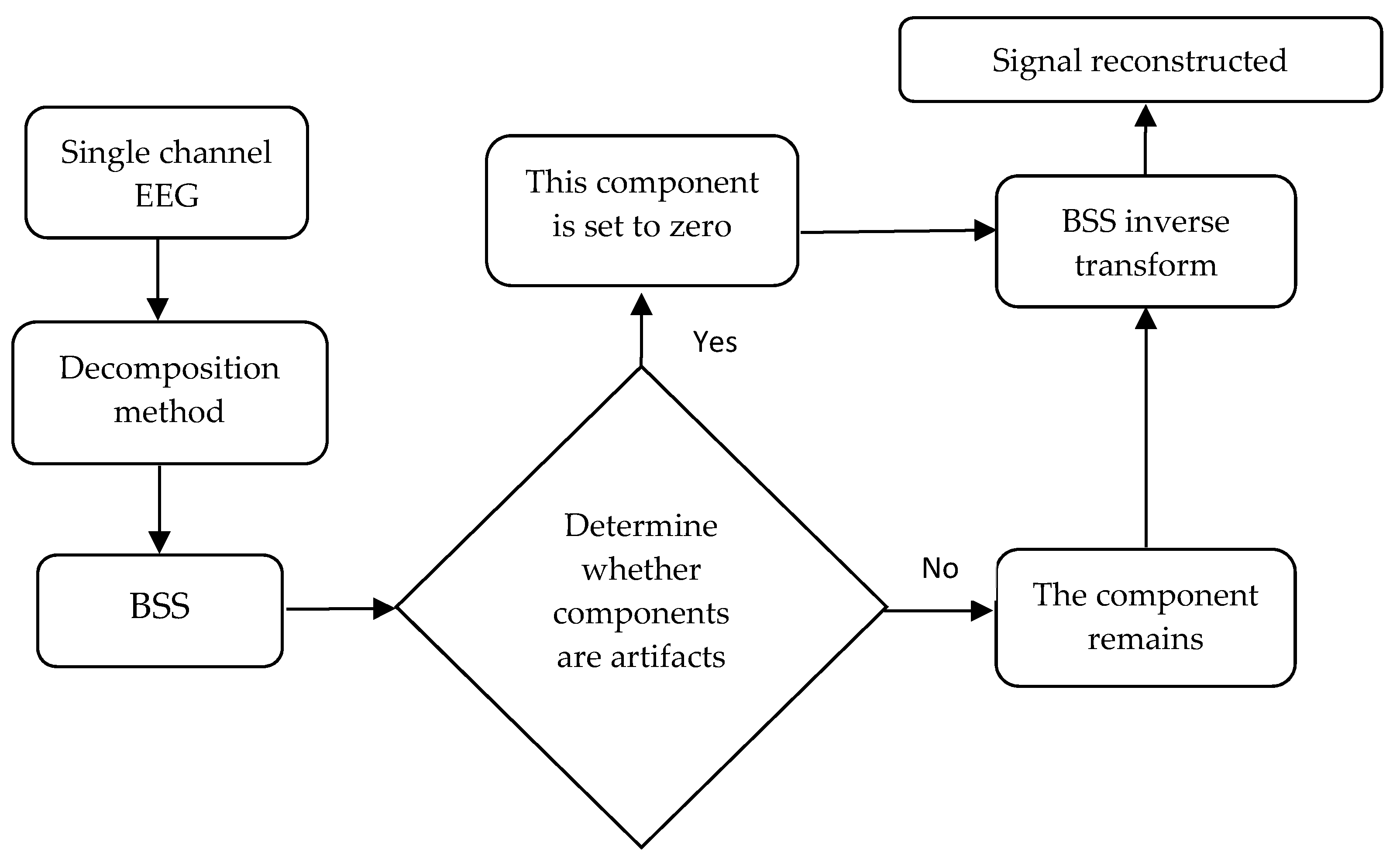
2.1. The Basic Idea of Single-Channel EEG Signal Artifact Removal
2.2. VMD
- (1)
- Initialization parameter ,, , ;
- (2)
- ;
- (3)
- , traversing , update and with the following formulas, respectively:
- (4)
- Update the Lagrange multiplier
- (5)
- Repeat steps 2–4 until the convergence condition of the following equation is satisfied
2.3. SOBI
- (1)
- First, pre-whitening is performed on the observed signal , and the whitening matrix is calculated, in order to remove the correlation between channels and to improve the decomposition effect. The whitened signal is denoted as .
- (2)
- Calculate the sampling covariance matrix of multiple delays of
- (3)
- For each covariance matrix calculated by the above formula, perform joint approximate diagonalization to calculate the orthogonal matrix :where is a set of diagonal matrices.
- (4)
- Estimate the mixing matrix and the source signal :
2.4. Artifact Recognition
3. Experimental Simulation and Analysis
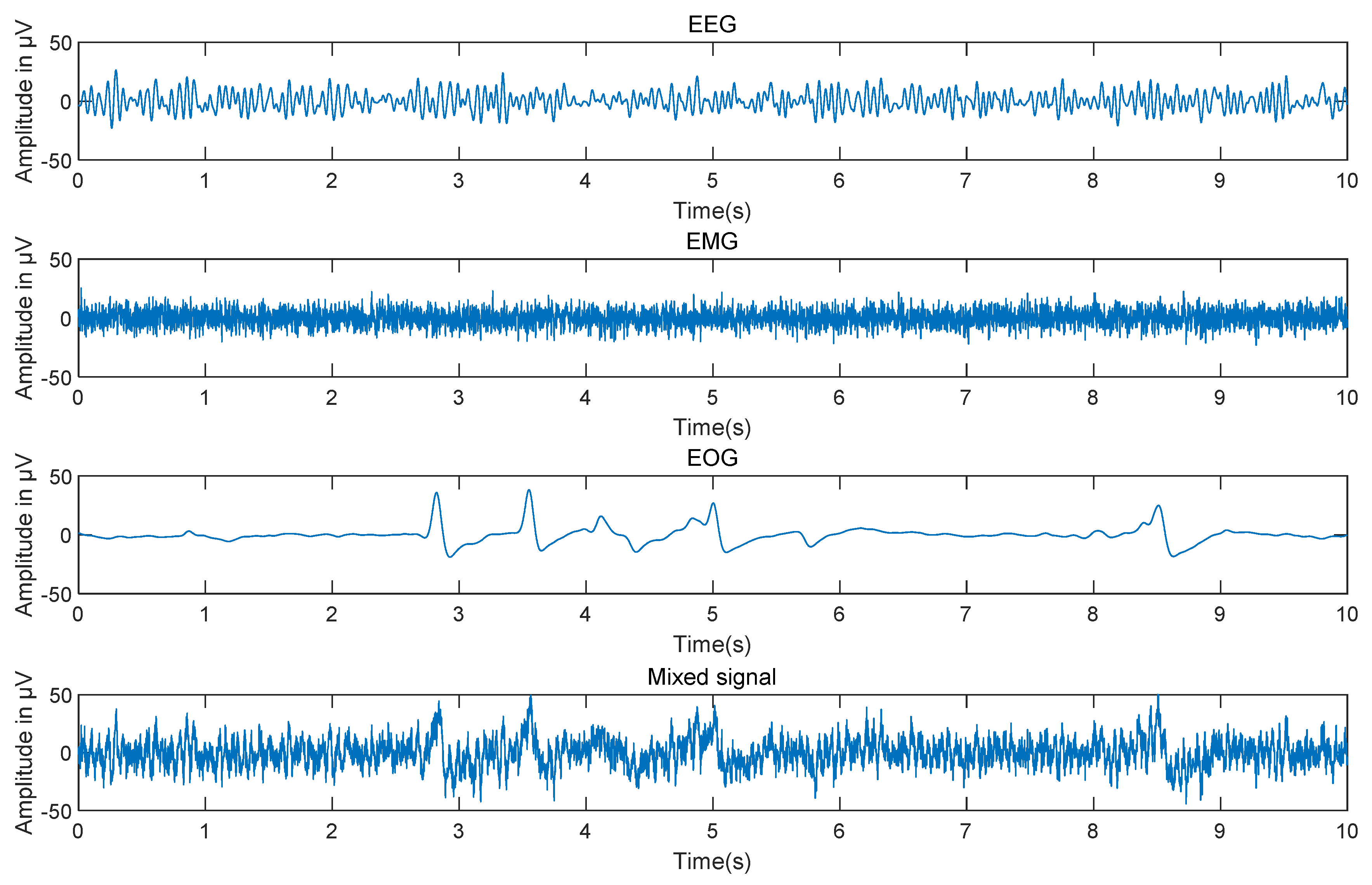
3.1. Experimental Data
3.2. Selection of VMD Parameters
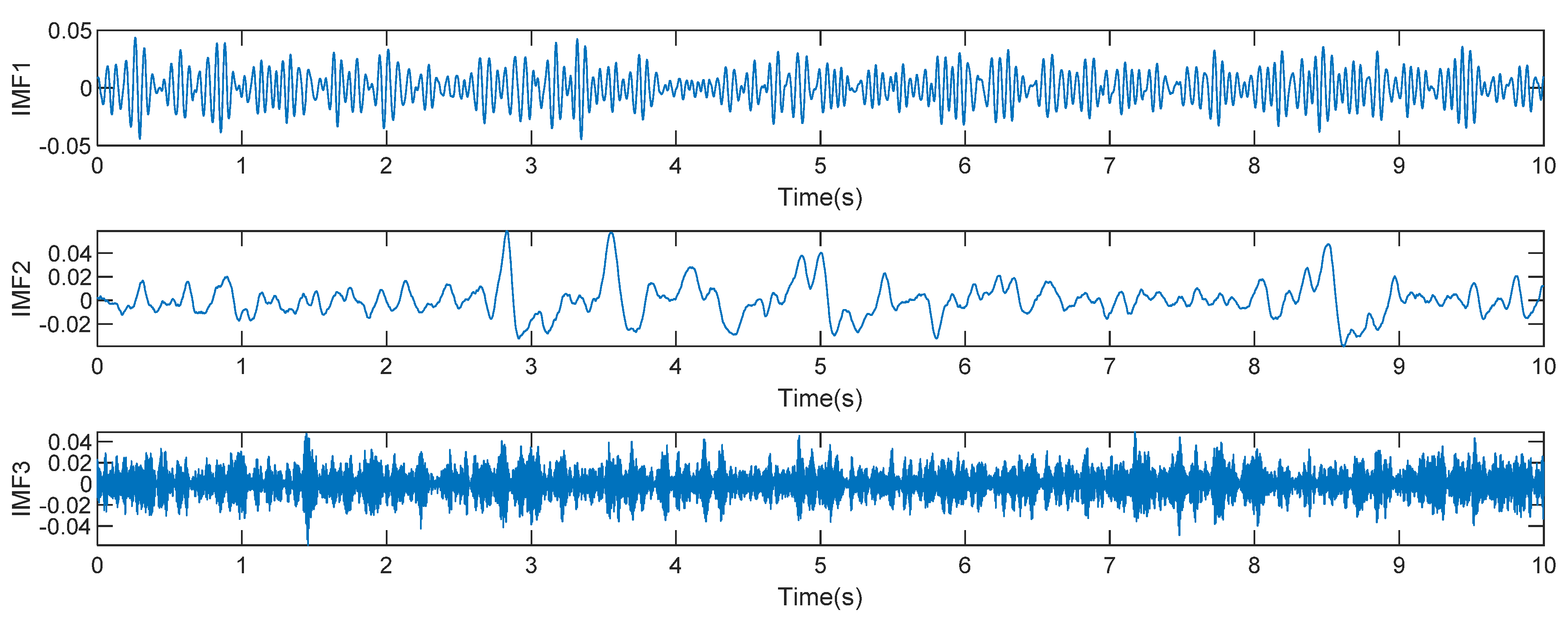
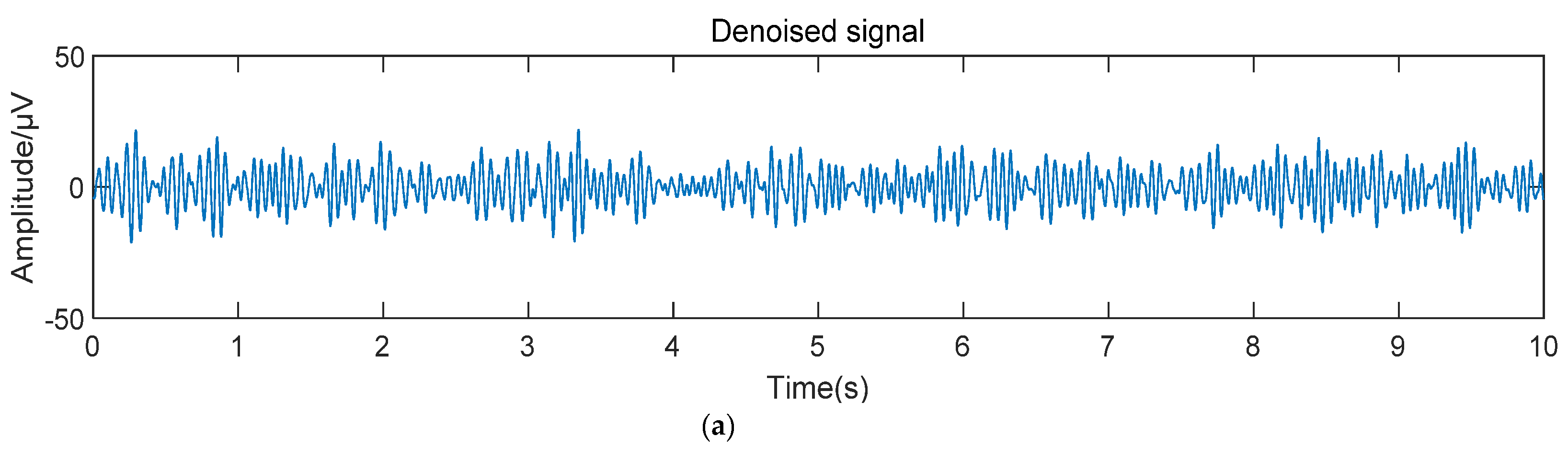
3.3. VMD-SOBI
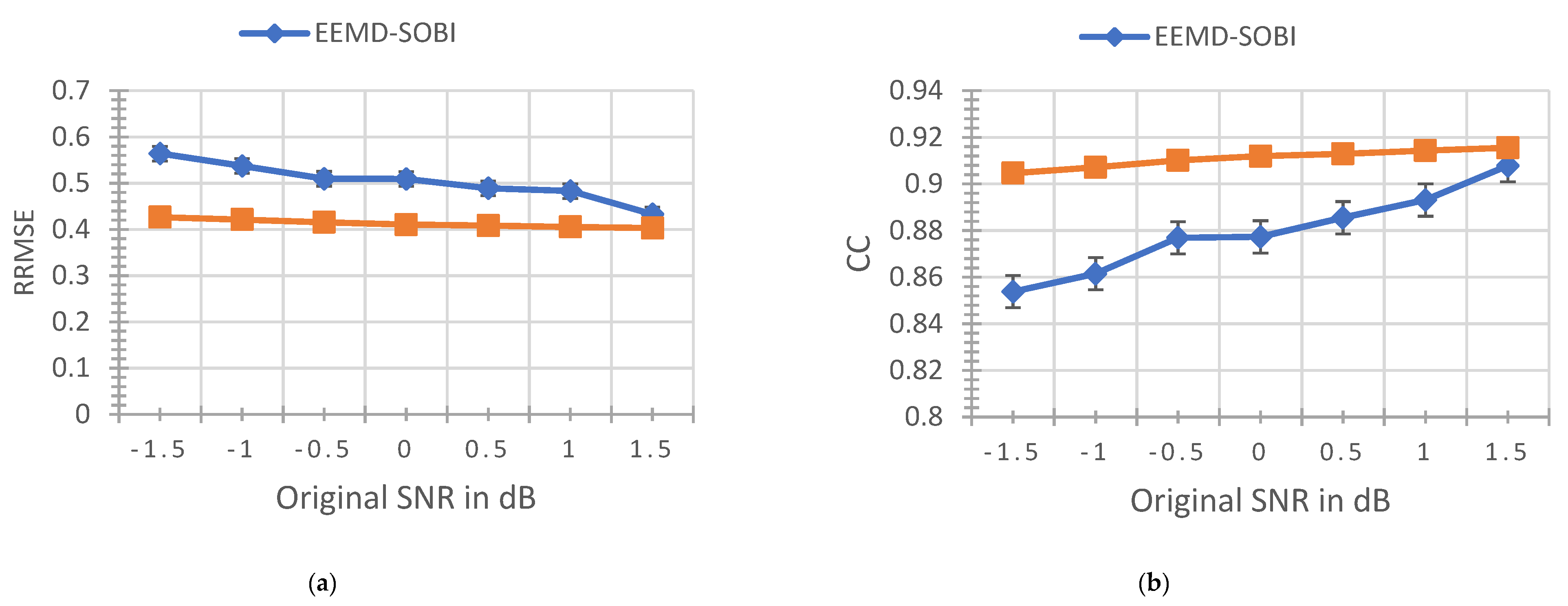
- SNR
- 2.
- RRMSE
- 3.
- CC
4. Experimental Parameter Problem
4.1. Influence of VMD Parameters on Results
4.1.1. Number of Modal Decomposition
4.1.2. Noise Tolerance
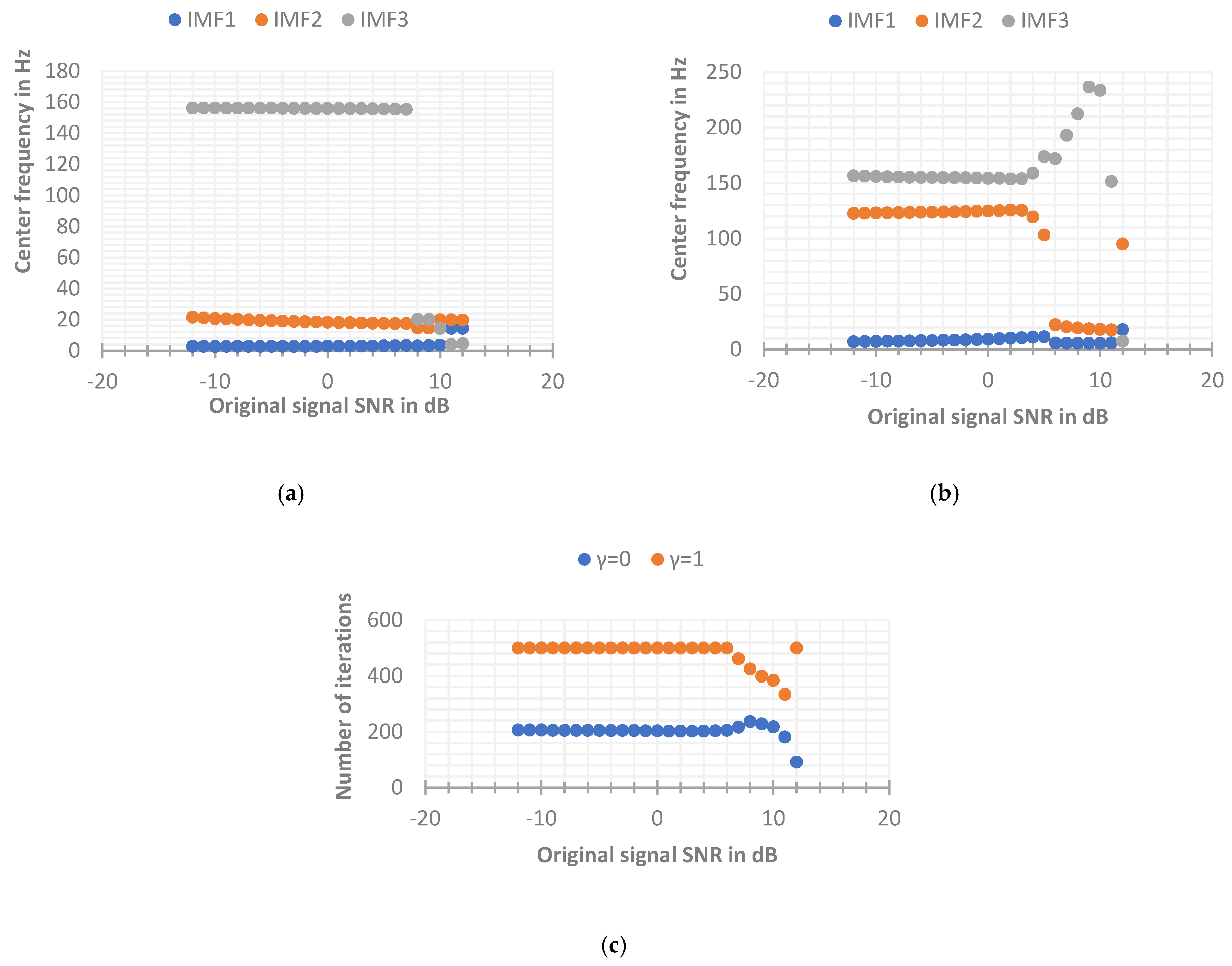
4.1.3. Initial Center Frequency
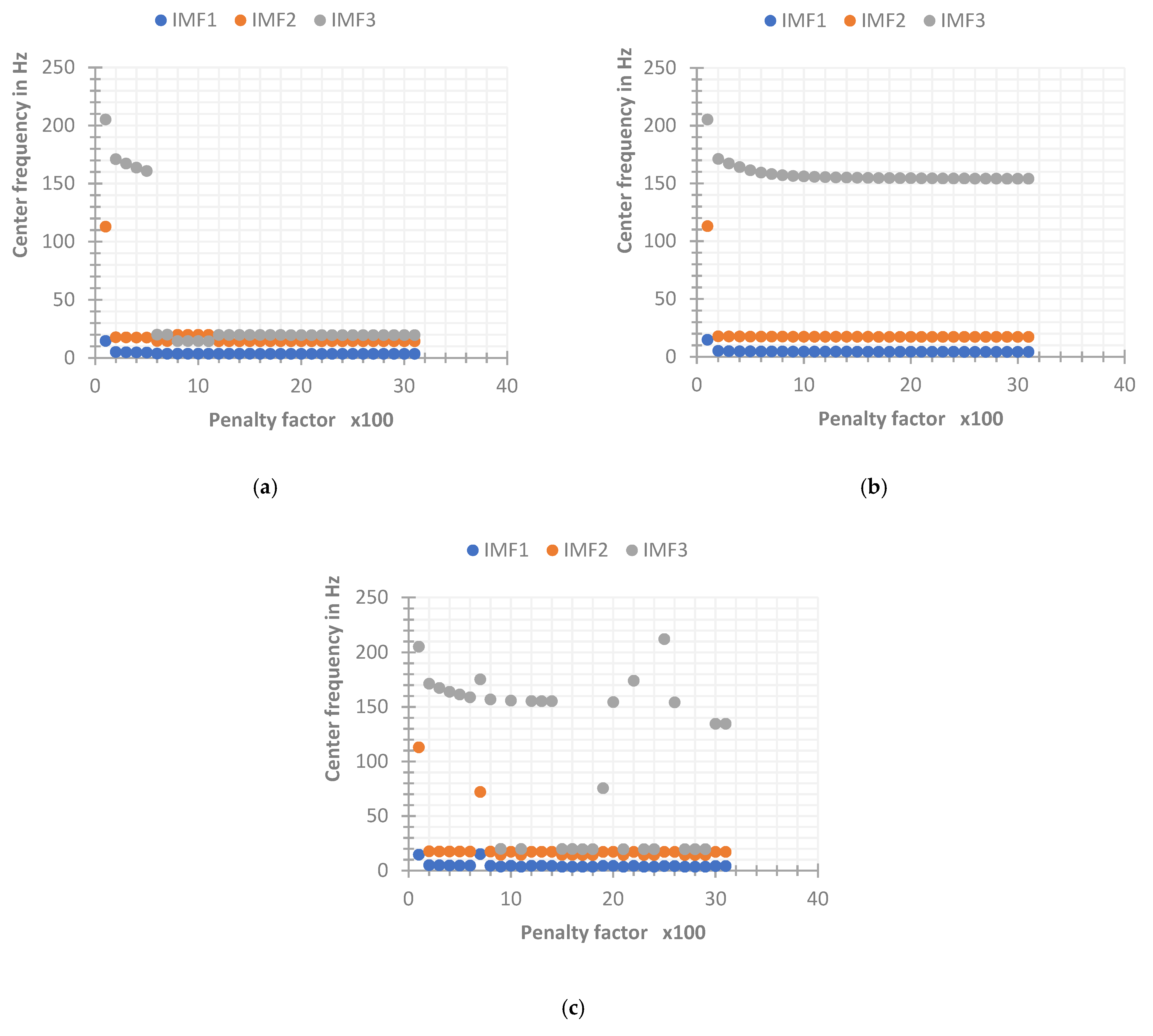
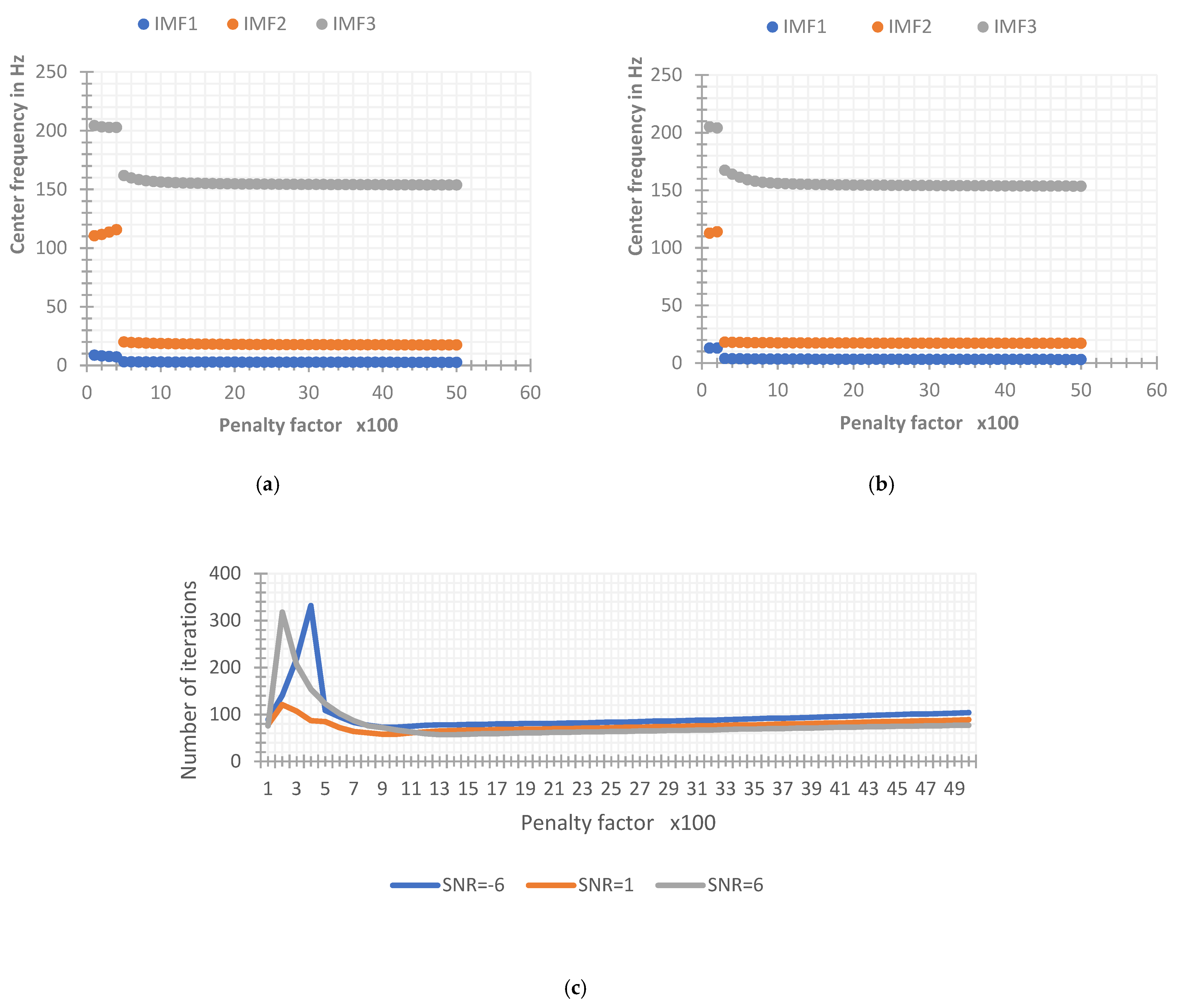
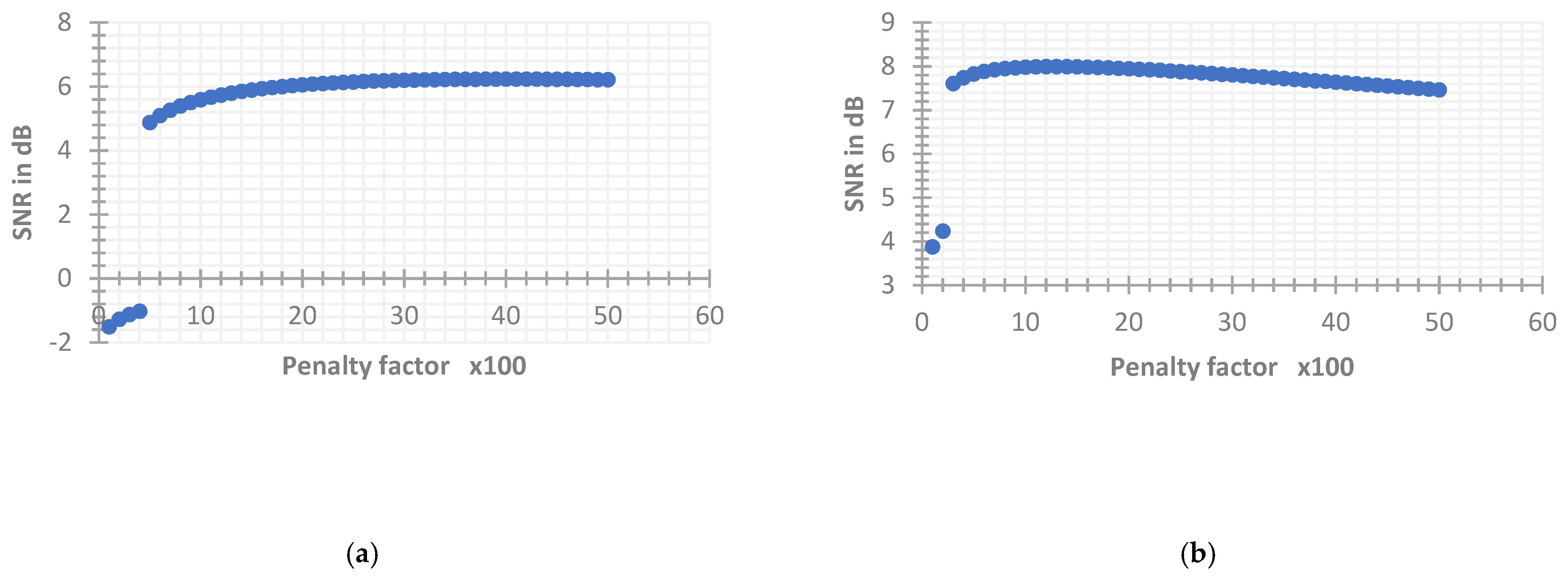
4.1.4. Quadratic Penalty Factor
4.2. Implementation of VMD
- (1)
- Initialize value, , and determine the range of value [2, 10] by analyzing the decomposition results of a large number of original signals and relevant references [25];
- (2)
- Perform VMD decomposition to obtain IMF components and the center frequency of each order signal component , represents the order;
- (3)
- Let , and perform VMD decomposition again to obtain IMF components and the center frequency of each order signal component ;
- (4)
- Calculate the judgment accuracy of the center frequency of each signal component under the same order with different values according to the following formula:
- (5)
- Determine the size of the judgment accuracy and the accuracy thresholds and (the values are 1 and 1.2 after a lot of experiments). If or , then it is determined that is an invalid center frequency and vice versa is valid;
- (6)
- The value to which the first invalid center frequency is identified (there may be invalid center frequencies under multiple K values) is the selected value.
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiaoyan, D.; Yingjie, L.; Yisheng, Z.; Qiushi, R.; Lun, Z. Removal of Artifact from EEG Signal. J. Biomed. Eng. 2008, 25, 464–467. [Google Scholar]
- McDermott, E.J.; Raggam, P.; Kirsch, S.; Belardinelli, P.; Ziemann, U.; Zrenner, C. Artifacts in EEG-Based BCI Therapies: Friend or Foe? Sensors 2022, 22, 96. [Google Scholar] [CrossRef] [PubMed]
- Wallstrom, G.L.; Kass, R.E.; Miller, A.; Cohn, J.F.; Fox, N.A. Automatic correction of ocular artifacts in the EEG: A comparison of regression-based and component-based methods. Int. J. Psychophysiol. 2004, 53, 105–119. [Google Scholar]
- He, P.; Wilson, G.; Russell, C. Removal of ocular artifacts from electro-encephalogram by adaptive filtering. Med. Biol. Eng. Comput. 2004, 42, 407–412. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: An open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef]
- Iriarte, J.; Urrestarazu, E.; Valencia, M.; Alegre, M.; Malanda, A.; Viteri, C.; Artieda, J. Independent component analysis as a tool to eliminate artifacts in EEG: A quantitative study. J. Clin. Neurophysiol. 2003, 20, 249–257. [Google Scholar]
- Chen, Q.; Chen, X.; Yu, F. Removal of Muscle Artfact from EEG Data Based on Independent Vector Analysis. J. Electron. Inf. Technol. 2016, 38, 2840–2847. [Google Scholar]
- Shackman, A.J.; McMenamin, B.W.; Slagter, H.A.; Maxwell, J.S.; Greischar, L.L.; Davidson, R.J. Electromyogenic artifacts and electroencephalographic inferences. Brain Topogr. 2009, 22, 7–12. [Google Scholar] [CrossRef]
- Gao, J.; Zheng, C.; Wang, P. Electromyography Artifact Removal from Eletroencephalogram in Real-Time. J. Xi’an Jiaotong Univ. 2010, 44, 114–118. [Google Scholar]
- De Clercq, W.; Vergult, A.; Vanrumste, B.; Van Paesschen, W.; Van Huffel, S. Canonical correlation analysis applied to remove muscle artifacts from the electroencephalogram. IEEE Trans. Biomed. Eng. 2006, 53, 2583–2587. [Google Scholar] [CrossRef]
- Abu Farha, N.; Al-Shargie, F.; Tariq, U.; Al-Nashash, H. Improved Cognitive Vigilance Assessment after Artifact Reduction with Wavelet Independent Component Analysis. Sensors 2022, 22, 3051. [Google Scholar] [CrossRef]
- Mannan, M.M.N.; Kamran, M.A.; Jeong, M.Y. Identification and Removal of Physiological Artifacts from Electroencephalogram Signals: A Review. IEEE Access 2018, 6, 30630–30652. [Google Scholar] [CrossRef]
- Mijović, B.; De Vos, M.; Gligorijević, I.; Taelman, J.; Van Huffel, S. Source Separation from Single-Channel Recordings by Combining Empirical Mode Decomposition and Independent Component Analysis. IEEE Trans. Biomed. Eng. 2010, 57, 2188–2196. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data annlysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Chen, X.; He, C.; Peng, H. Removal of muscle artifacts from single-channel EEG based on ensemble empirical mode decomposition and multiset canonical correlation analysis. J. Appl. Math. 2014, 1–10, 1–10. [Google Scholar]
- Wang, Y.; Kuang, Y.; Ge, J.; Xu, D.; Sun, Y. De-noising Method for Bearing Vibration Signal Based on CEEMD and Wavelet Semi-soft Threshold. J. Vib. Meas. Diagn. 2018, 38, 80–86. [Google Scholar]
- Cheng, J.; Li, L.; Li, C.; Liu, Y.; Liu, A.; Qian, R.; Chen, X. Remove Diverse Artifacts Simultaneously from a Single-Channel EEG Based on SSA and ICA: A Semi-Simulated Study. IEEE Access 2019, 7, 60276–60289. [Google Scholar] [CrossRef]
- Dora, C.; Biswal, P.K. An improved algorithm for efficient ocular artifact suppression from frontal EEG electrodes using VMD. Biocybern. Biomed. Eng. 2020, 40, 148–161. [Google Scholar]
- Chen, X.; Liu, A.; Chen, Q.; Liu, Y.; Zou, L.; McKeown, M.J. Simultaneous ocular and muscle artifact removal from EEG data by exploiting diverse statistics. Comput. Biol. Med. 2017, 88, 1–10. [Google Scholar]
- Urigüen, J.A.; Garcia-Zapirain, B. EEG artifact removal state-of-the-art and guidelines. J. Neural Eng. 2015, 12, 031001. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process 2014, 62, 531–544. [Google Scholar]
- Belouchrani, A.; Abed-Meraim, K.; Cardoso, J.F.; Moulines, E. A blind source separation technique using second-order statistics. IEEE Trans. Signal Processing 1997, 45, 434–444. [Google Scholar] [CrossRef]
- Longxin, Z.; Minmin, M.; Wenjun, H. Research on Removing Ocular Artifacts from Multi-Channel EEG signals. In Proceedings of the 2021 7th International Conference on Computer and Communications (ICCC), Chengdu, China, 10–13 December 2021; pp. 2280–2286. [Google Scholar]
- Leeb, F.R.; Lee, C.; Keinrath, R.; Scherer, H.; Bischof, G. Pfurtscheller. Brain-computer communication: Motivation, aim, and impact of exploring a virtual apartment. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 473–482. [Google Scholar] [CrossRef] [PubMed]
- Reuderink, B.; Poel, M.; Nijholt, A. The impact of loss of control on movement BCIs. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 628. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IC | IC1 | IC2 | IC3 |
|---|---|---|---|
| FE |
| Method | |||
|---|---|---|---|
| EEMD-SOBI | 6.2524 | 0.4865 | 0.8915 |
| VMD-SOBI | 7.8232 | 0.4052 | 0.9143 |
| Source Signal | Frequency Range |
|---|---|
| EOG | 0–5 Hz |
| EEG | 10–50 Hz |
| EMG | 80–250 Hz |
| Center Frequency in Hz | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 2 | 0.0062 | 0.0356 | ||||||||
| 3 | 0.0061 | 0.0355 | 0.3122 | |||||||
| 4 | 0.0061 | 0.0355 | 0.2406 | 0.3831 | ||||||
| 5 | 0.0061 | 0.0353 | 0.1729 | 0.3072 | 0.4327 | |||||
| 6 | 0.0055 | 0.0296 | 0.0419 | 0.1847 | 0.3103 | 0.4337 | ||||
| 7 | 0.0054 | 0.0293 | 0.0413 | 0.1473 | 0.2506 | 0.3480 | 0.4448 | |||
| 8 | 0.0054 | 0.0292 | 0.0410 | 0.1375 | 0.2293 | 0.3061 | 0.3796 | 0.4615 | ||
| 9 | 0.0054 | 0.0288 | 0.0404 | 0.1097 | 0.1796 | 0.2483 | 0.3165 | 0.3894 | 0.4665 | |
| 10 | 0.0053 | 0.0288 | 0.0403 | 0.1067 | 0.1737 | 0.2390 | 0.3030 | 0.3617 | 0.4231 | 0.4779 |
| Judgment Accuracy | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 2 | 1.0037 | 1.0014 | |||||||
| 3 | 1.0046 | 1.0019 | 1.2976 | ||||||
| 4 | 1.0088 | 1.0042 | 1.3910 | 1.2469 | |||||
| 5 | 1.1065 | 1.1915 | 4.1299 | 1.6630 | 1.3943 | ||||
| 6 | 1.0092 | 1.0113 | 1.0152 | 1.2540 | 1.2381 | 1.2464 | |||
| 7 | 1.0036 | 1.0043 | 1.0055 | 1.0710 | 1.0932 | 1.1369 | 1.1717 | ||
| 8 | 1.0096 | 1.0122 | 1.0157 | 1.2540 | 1.2764 | 1.2324 | 1.1993 | 1.1852 | |
| 9 | 1.0014 | 1.0017 | 1.0022 | 1.0284 | 1.0341 | 1.0389 | 1.0445 | 1.0766 | 1.1026 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhang, C. Remove Artifacts from a Single-Channel EEG Based on VMD and SOBI. Sensors 2022, 22, 6698. https://doi.org/10.3390/s22176698
Liu C, Zhang C. Remove Artifacts from a Single-Channel EEG Based on VMD and SOBI. Sensors. 2022; 22(17):6698. https://doi.org/10.3390/s22176698
Chicago/Turabian StyleLiu, Changrui, and Chaozhu Zhang. 2022. "Remove Artifacts from a Single-Channel EEG Based on VMD and SOBI" Sensors 22, no. 17: 6698. https://doi.org/10.3390/s22176698
APA StyleLiu, C., & Zhang, C. (2022). Remove Artifacts from a Single-Channel EEG Based on VMD and SOBI. Sensors, 22(17), 6698. https://doi.org/10.3390/s22176698