

Design of a Concentric Multi-Scale Zoom Optical System Based on Wide Object Distance and High-Precision Imaging

Abstract
:1. Introduction
2. Principle
2.1. Principle of the Initial Structure Calculation
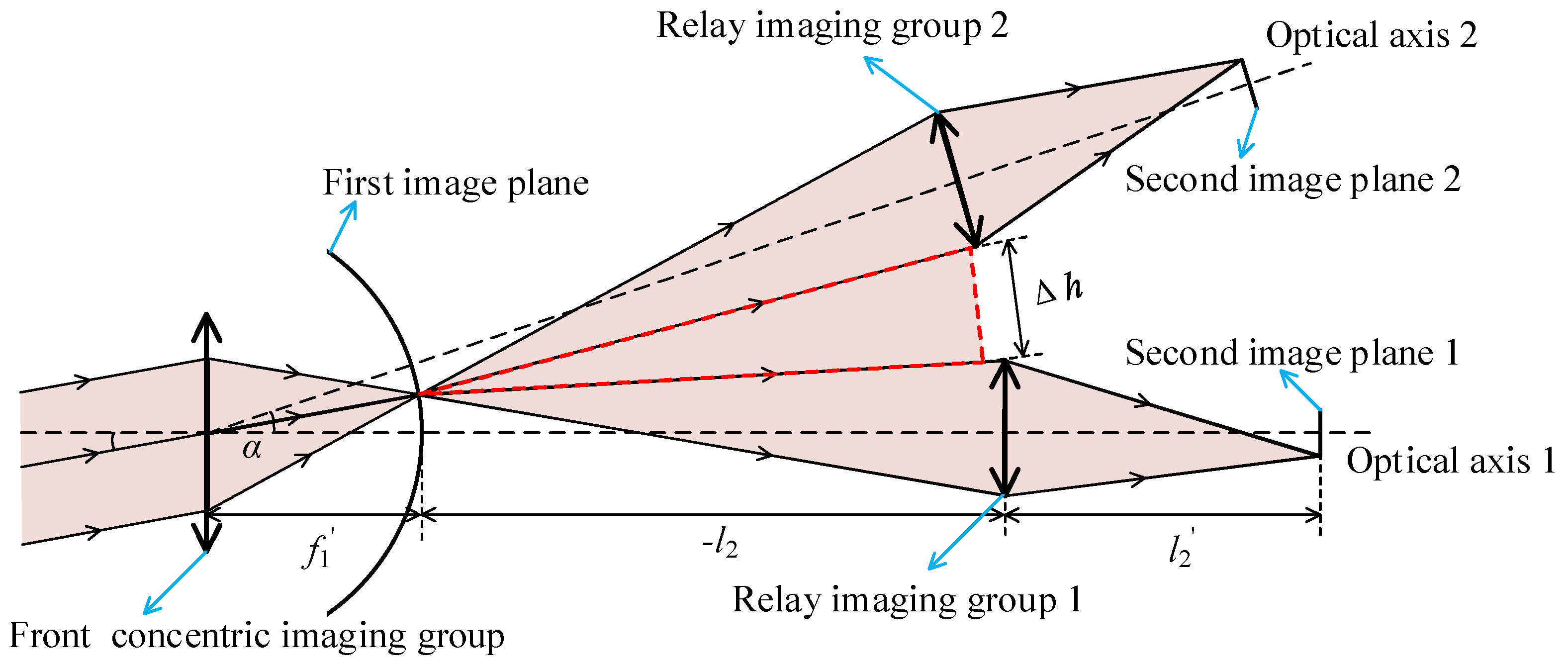
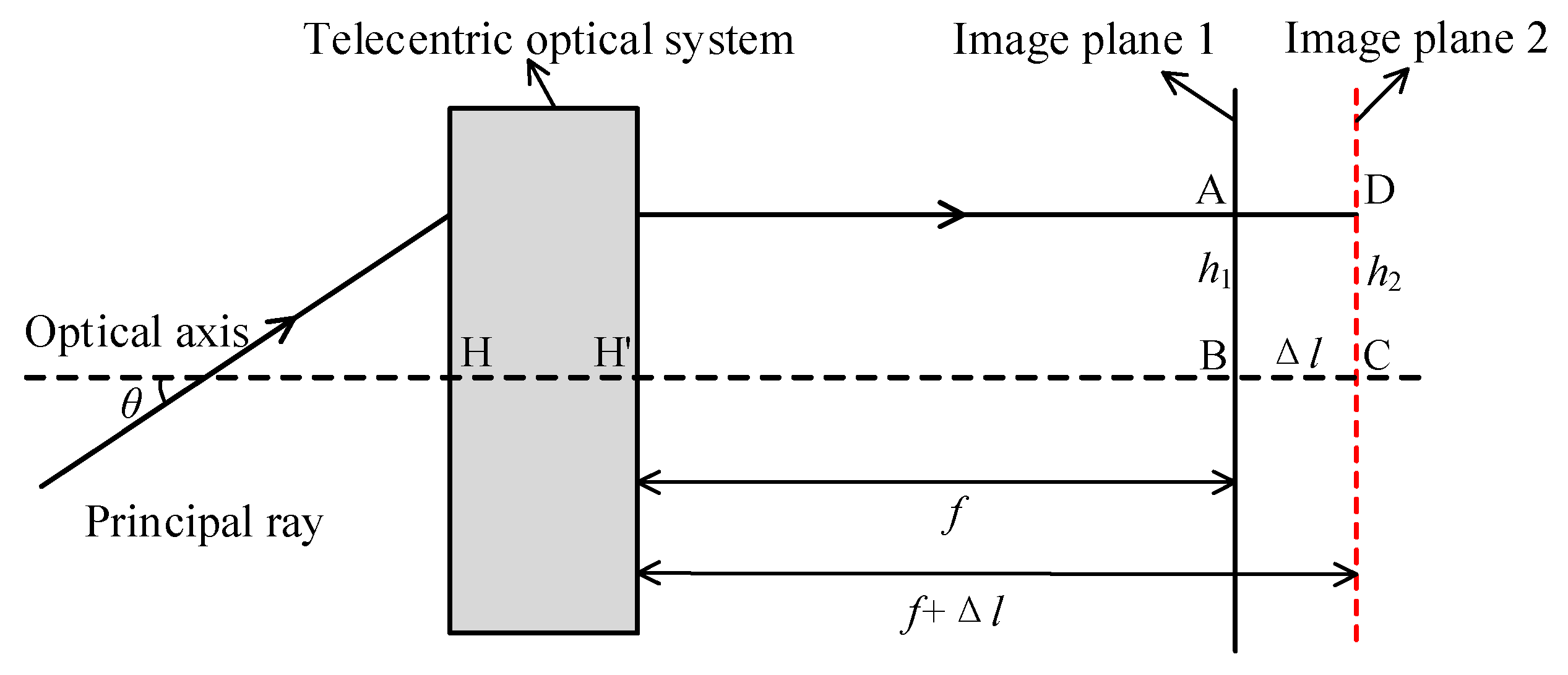
2.2. Image Stitching Misalignment Analysis
3. Design and Results
3.1. Concentric Multi-Scale Optical System Design
3.1.1. Design Specifications
3.1.2. Design of the Front Concentric Imaging Group
3.1.3. Design of the Image-Space Telecentric Relay Imaging Group and Entire System
3.2. Design of the Zoom Concentric Multi-Scale Optical System
3.2.1. Design of the Telecentric Relay Imaging Group with Variable Magnification
3.2.2. Overall Design of the Concentric Multi-Scale Zoom Optical System and Evaluation
4. Conclusions
- (1)
- The number of lenses required for an image-space telecentric optical system will be higher compared to a non-image-space telecentric optical system.
- (2)
- The imaging FOV of the concentric multi-scale optical system will vary during zooming, and the imaging FOV of adjacent cameras will no longer overlap, thus making image stitching impossible, so the 7 × 7 relay imaging group cannot all achieve zooming.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Golish, D.R.; Vera, E.M.; Kelly, K.J.; Gong, Q.; Jansen, P.A.; Hughes, J.M.; Kittle, D.S.; Brady, D.J.; Gehm, M.E. Development of a scalable image formation pipeline for multiscale gigapixel photography. Opt. Express 2012, 20, 22048. [Google Scholar] [CrossRef] [PubMed]
- Li, J.H.; Tan, F.L.; Zeng, C.X.; Ji, Y.Q. Optical System Design of Wide-coverage and High-resolution Airborne Camera. Acta Opt. Sin. 2021, 41, 131–139. [Google Scholar]
- Brady, D.J.; Hagen, N. Multiscale lens design. Opt. Express 2009, 17, 10659–10674. [Google Scholar] [CrossRef] [PubMed]
- Marks, D.L.; Son, H.S.; Kim, J.; Brady, D.J. Engineering a gigapixel monocentric multiscale camera. Opt. Eng. 2012, 51, 083202. [Google Scholar] [CrossRef]
- Brady, D.J.; Gehm, M.E.; Stack, R.A.; Marks, D.L.; Kittle, D.S.; Golish, D.R.; Vera, E.M.; Feller, S.D. Multiscale gigapixel photography. Nature 2012, 486, 386–389. [Google Scholar] [CrossRef]
- Johnson, A.; Mclaughlin, P.; Shaw, J.M.; Kim, J.; Hui, S.S.; Marks, D.L.; Brady, D.J.; Stack, R.A. Optomechanical design of multiscale gigapixel digital camera. Appl. Opt. 2013, 52, 1541–1549. [Google Scholar]
- Liu, F.; Liu, J.W.; Shao, X.P. Design of high integration and miniaturization concentric multiscale optical system. Opt. Precis. Eng. 2020, 28, 1275–1282. [Google Scholar]
- Yang, W.; Liu, J.W.; Han, P.L.; Shao, X.P.; Zhao, X.M. Design of an infrared zoom imaging system based on concentric spherical lens with wide FOV and high resolution. J. Infrared Millim. Waves 2019, 38, 805–812. [Google Scholar]
- Pang, W.; Brady, D.J. Galilean monocentric multiscale optical systems. Opt. Express 2017, 25, 20332–20339. [Google Scholar] [CrossRef] [PubMed]
- Marks, D.L.; Tremblay, E.J.; Ford, J.E.; Brady, D.J. Microcamera aperture scale in monocentric gigapixel cameras. Appl. Opt. 2011, 50, 5824–5833. [Google Scholar] [CrossRef] [PubMed]
- Youn, S.H.; Son, H.S.; Marks, D.L. Optical performance test and validation of microcameras in multiscale, gigapixel imagers. Opt. Express 2014, 22, 3712–3723. [Google Scholar] [CrossRef] [PubMed]
- Marks, D.L.; Llull, P.R.; Phillips, Z.; Anderson, J.G.; Feller, S.D.; Vera, E.M.; Son, H.S.; Youn, S.H.; Kim, J.; Gehm, M.E. Characterization of the AWARE 10 two-gigapixel wide-field-of-view visible imager. Appl. Opt. 2014, 53, C54–C63. [Google Scholar] [CrossRef]
- Llull, P.; Bange, L.; Phillips, Z.; Davis, K.; Brandy, D.J. Characterization of the AWARE 40 wide-field-of-view visible imager. Optica 2015, 2, 1086–1089. [Google Scholar] [CrossRef]
- Wu, X.X. Design and Development of Wide FOV High Resolution Optical System Based on Multisacle Imaging Principle. Doctor’s Thesis, Xidian University, Xi’an, China, 2018. [Google Scholar]
- Chen, H.Y.; Miao, F.; Chen, Y.J.; Xiong, Y.J.; Chen, T. A Hyperspectral Image Classification Method Using Multifeature Vectors and Optimized KELM. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2781–2795. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Y.; Wang, Y.W.; Sun, J.; Ji, T.; Zhao, Q.L. Fast image stitching algorithm based on improved FAST-SURF. J. Appl. Opt. 2021, 42, 636–642. [Google Scholar]
- Liu, T.T.; Zhang, J.L. Improved image stitching algorithm based on ORB features by UAV remote sensing. Comput. Eng. Appl. 2018, 54, 193–197. [Google Scholar]
- Yao, R.; Guo, C.; Deng, W.; Zhao, H.M. A novel mathematical morphology spectrum entropy based on scale-adaptive techniques. ISA Trans. 2021. [Google Scholar] [CrossRef] [PubMed]
- Li, J.Y.; Feng, W.X.; Liu, F.; Wei, Y.Z.; Shao, X.P. Design of Airborne Multi-Scale Wide-Field-of-View and High-Resolution Imaging System. Acta Opt. Sin. 2021, 41, 50–60. [Google Scholar]
- Shen, Y. Research on Super Large Field of View Optical Imaging Technology Based on Concentric Lens. Doctor’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2018. [Google Scholar]
- Lu, W.; Chen, S.; Xiong, Y.; Liu, J. A single ball lens-based hybrid biomimetic fish eye/compound eye imaging system. Opt. Commun. 2020, 480, 126458. [Google Scholar] [CrossRef]
- Zhang, K.; Zhong, X.; Wang, W.; Meng, Y.; Ma, C. High-efficiency calibration of star sensor based on two-dimensional Dammann grating. Opt. Eng. 2019, 58, 085104. [Google Scholar] [CrossRef]
- Zhang, K. Research on the Space Target Measuring Optical System with High Precision and Large Field of View. Doctor’s Thesis, University of Chinese Academy of Sciences, Beijing, China, 2021. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Focal length | 50 mm |
| F-number | 3.0 |
| Working spectrum FOV Relay imaging camera | 480–660 nm 60° × 45° 7 × 7 |
| Nyquist MTF | 145 lp/mm |
| Overlapping rate of FOV | 5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.; Qu, Z.; Li, J.; Wang, J.; Sun, S.; Yang, F. Design of a Concentric Multi-Scale Zoom Optical System Based on Wide Object Distance and High-Precision Imaging. Sensors 2022, 22, 7356. https://doi.org/10.3390/s22197356
Zhang K, Qu Z, Li J, Wang J, Sun S, Yang F. Design of a Concentric Multi-Scale Zoom Optical System Based on Wide Object Distance and High-Precision Imaging. Sensors. 2022; 22(19):7356. https://doi.org/10.3390/s22197356
Chicago/Turabian StyleZhang, Kun, Zheng Qu, Jingchen Li, Jian Wang, Si Sun, and Fan Yang. 2022. "Design of a Concentric Multi-Scale Zoom Optical System Based on Wide Object Distance and High-Precision Imaging" Sensors 22, no. 19: 7356. https://doi.org/10.3390/s22197356
APA StyleZhang, K., Qu, Z., Li, J., Wang, J., Sun, S., & Yang, F. (2022). Design of a Concentric Multi-Scale Zoom Optical System Based on Wide Object Distance and High-Precision Imaging. Sensors, 22(19), 7356. https://doi.org/10.3390/s22197356