
Kinematic Determination of the Aerial Phase in Ski Jumping


Abstract
:1. Introduction
2. Materials and Methods
2.1. dGNSS Measurement
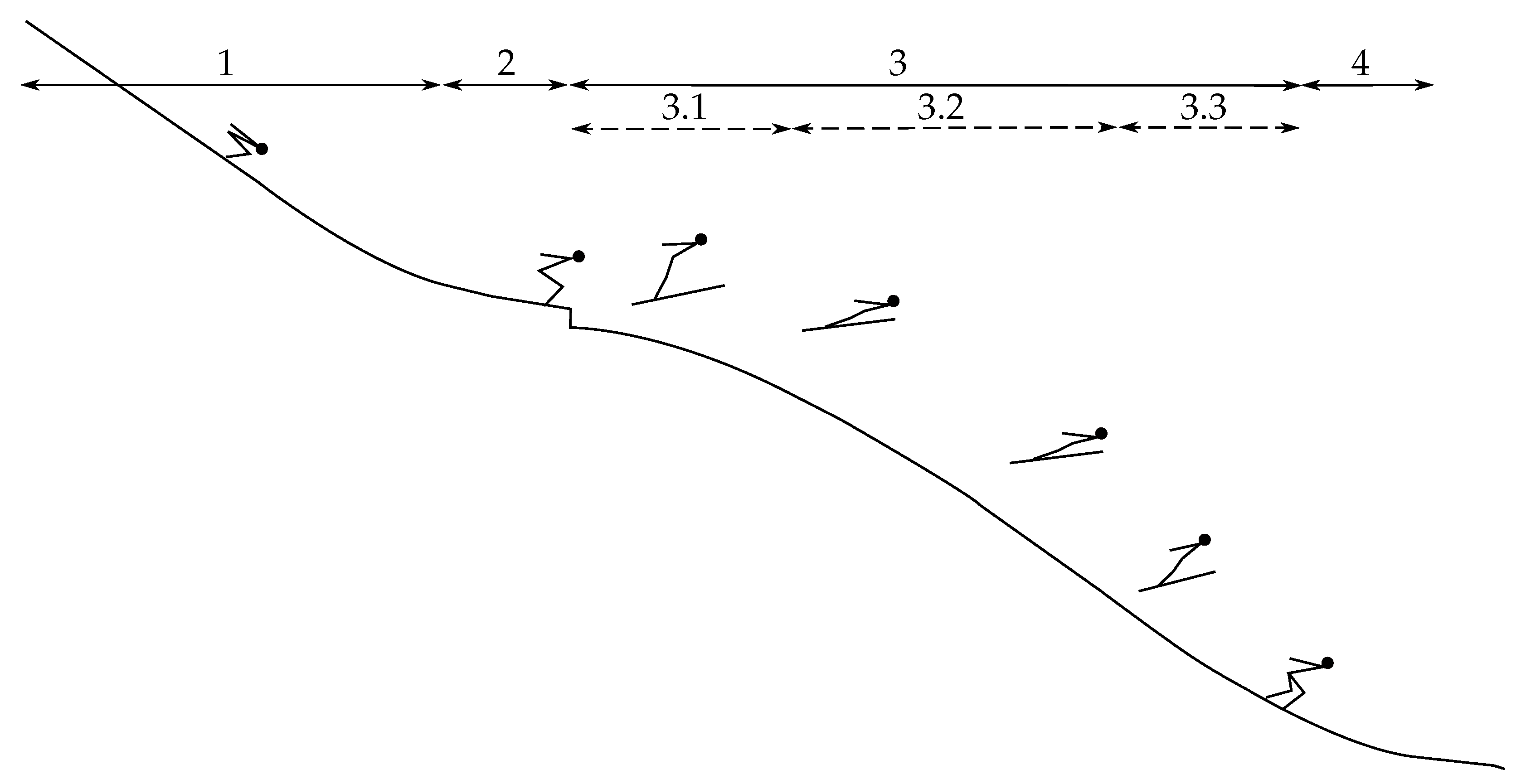
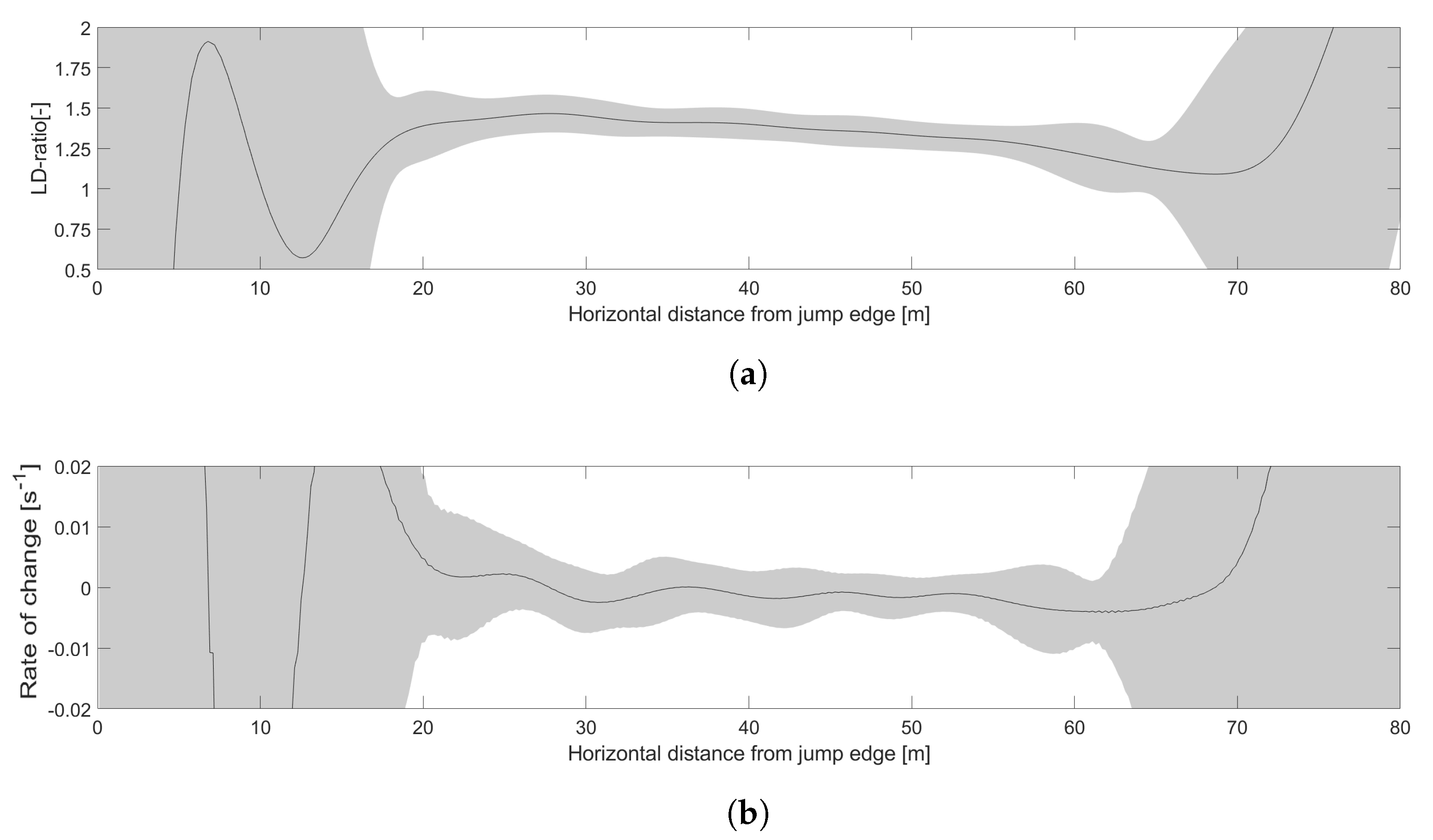
2.2. The Rationale behind the Determination of the Steady Glide Phase
3. Results and Discussion
3.1. Determination of
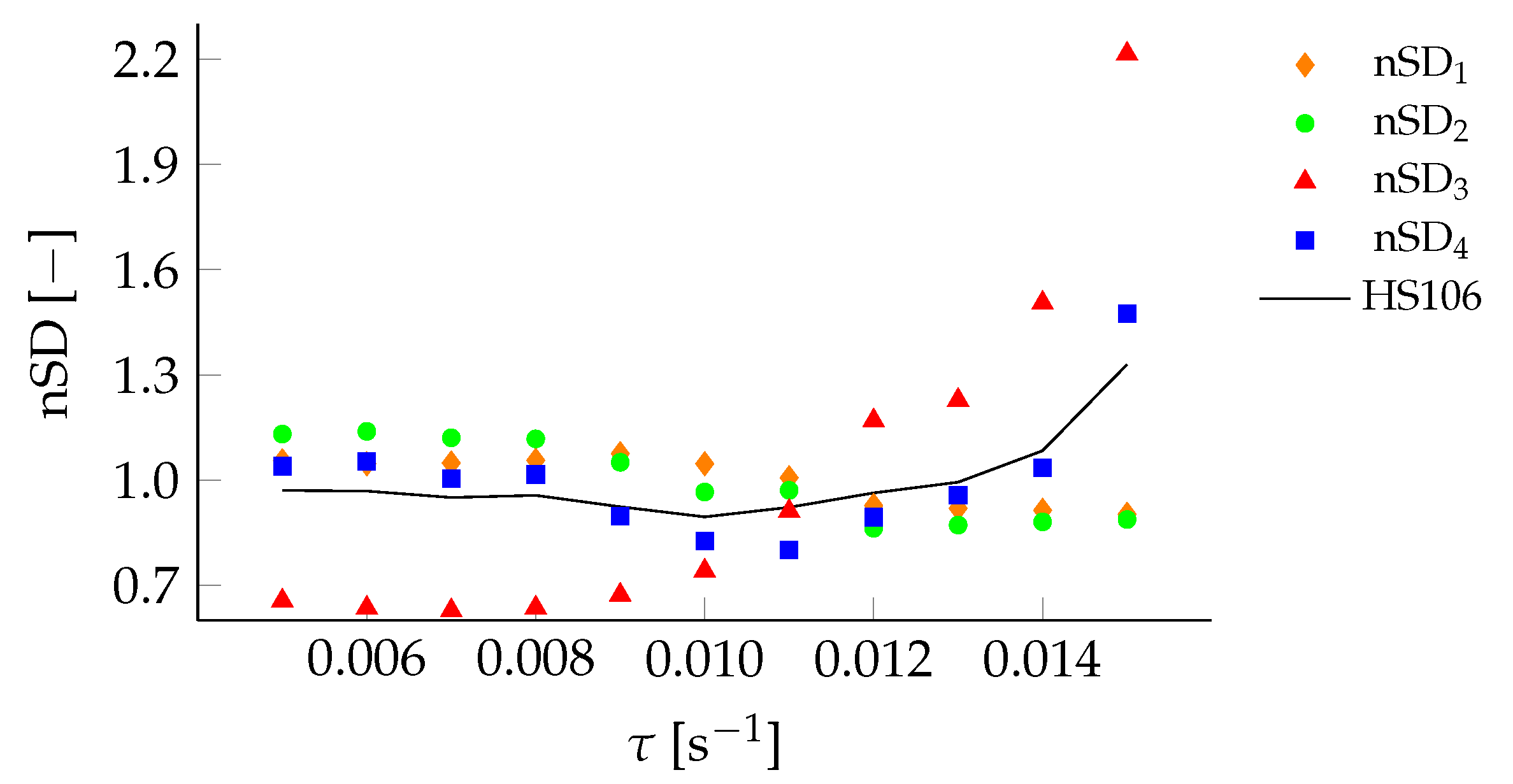
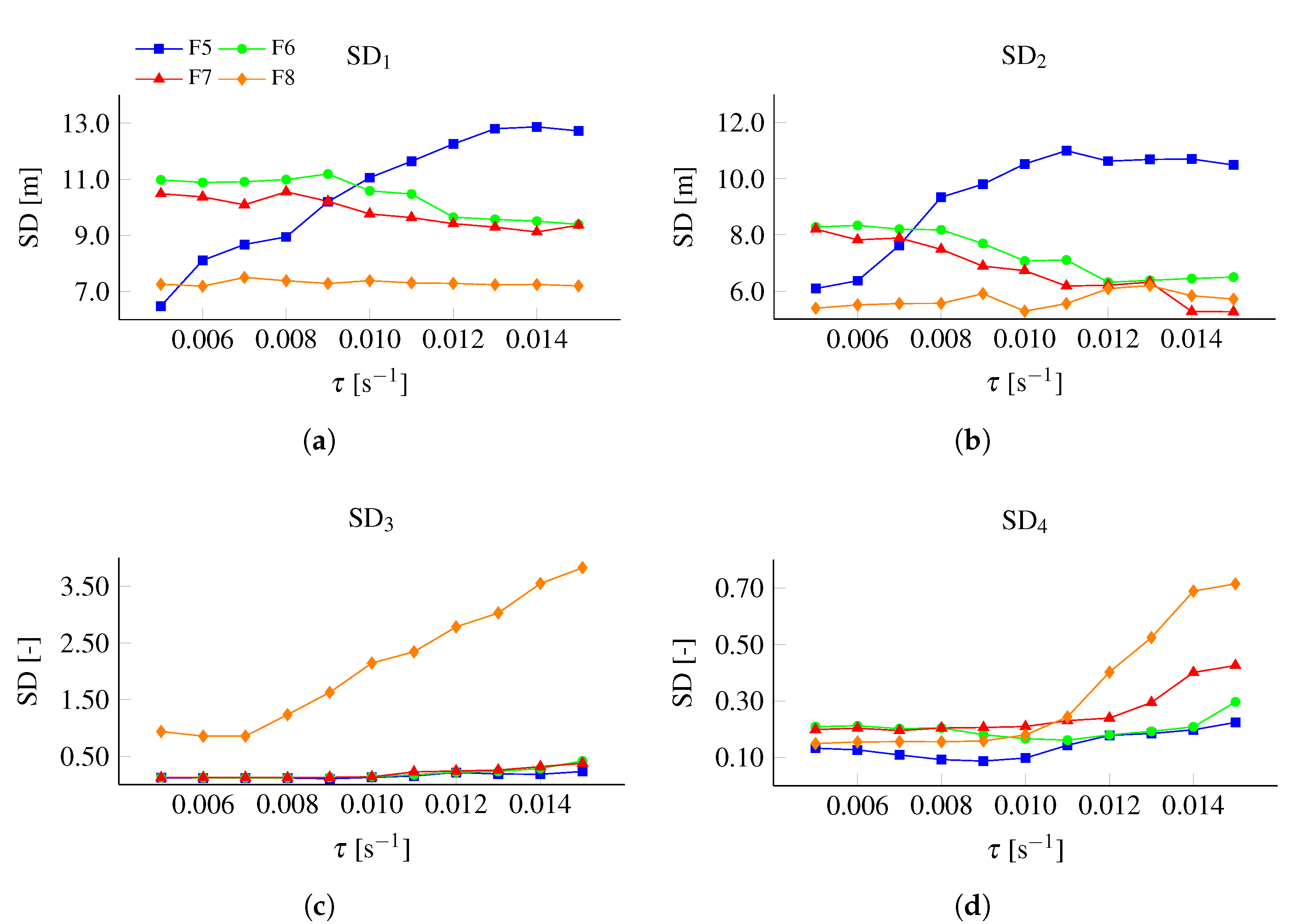
3.2. Filtering Analysis
3.3. Hill Size and Performance Level
3.4. Possibilities and Limitations
3.5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| dGNSS | differential Global Navigation Satellite System |
| F0-F10 | filter settings |
| -ratio | lift-to-drag ratio |
| SD | standard deviation of start (1) and end (2) of glide phase and -ratio at these points (3,4) |
| rate-of-change threshold | |
| p | start of algorithm search |
Appendix A. Filter Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | f(x,y,x) | f(x,y,x) | f(x,y,x) |
|---|---|---|---|
| (HZ) | (HZ) | (HZ) | |
| F0 | inf | inf | inf |
| F1 | 10 | 10 | 7 |
| F2 | 8 | 6 | 4 |
| F3 | 5 | 5 | 4 |
| F4 | 5 | 3 | 2 |
| F5 | 4 | 3 | 2 |
| F6 | 2 | 3 | 2 |
| F7 | 3 | 2 | 1.5 |
| F8 | 2 | 1.5 | 1 |
| F9 | 1 | 1 | 1 |
| F10 | 0.5 | 0.5 | 0.5 |
| Filter | 0.015 | 0.014 | 0.013 | 0.012 | 0.011 | 0.010 | 0.009 | 0.008 | 0.007 | 0.006 | 0.005 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F3 | 18.4 | 7.9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F4 | 94.7 | 84.2 | 81.6 | 81.6 | 78.9 | 78.9 | 73.7 | 52.6 | 44.7 | 28.9 | 18.4 |
| F5 | 100 | 100 | 100 | 100 | 97.4 | 92.1 | 92.1 | 84.2 | 76.3 | 63.2 | 50 |
| F6 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 97.4 | 94.7 |
| F7 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 97.4 |
| F8 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| F9 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 | 97.4 |
| F10 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 97.4 | 97.4 | 89.5 | 81.6 |


References
- Müller, W. Determinants of ski-jump performance and implications for health, safety and fairness. Sport. Med. 2009, 39, 85–106. [Google Scholar] [CrossRef]
- Schwameder, H. Biomechanics research in ski jumping, 1991–2006. Sport. Biomech. 2008, 7, 114–136. [Google Scholar] [CrossRef]
- Elfmark, O.; Ettema, G. Aerodynamic investigation of the inrun position in Ski jumping. Sport. Biomech. 2021, 1–15. [Google Scholar] [CrossRef]
- Virmavirta, M.; Isolehto, J.; Komi, P.; Schwameder, H.; Pigozzi, F.; Massazza, G. Take-off analysis of the Olympic ski jumping competition (HS-106 m). J. Biomech. 2009, 42, 1095–1101. [Google Scholar] [CrossRef] [PubMed]
- Ettema, G.; Braaten, S.; Danielsen, J.; Fjeld, B.E. Imitation jumps in ski jumping: Technical execution and relationship to performance level. J. Sport. Sci. 2020, 38, 2155–2160. [Google Scholar] [CrossRef]
- Arndt, A.; Brüggemann, G.P.; Virmavirta, M.; Komi, P. Techniques used by Olympic ski jumpers in the transition from takeoff to early flight. J. Appl. Biomech. 1995, 11, 224–237. [Google Scholar] [CrossRef]
- Schwameder, H.; Müller, E.; Lindenhofer, E.; DeMonte, G.; Potthast, W.; Brüggemann, P.; Virmavirta, M.; Isolehto, J.; Komi, P. Kinematic characteristics of the early flight phase in ski-jumping. In Science and Skiing III; Meyer & Meyer Verlag: Oxford, UK, 2005; pp. 381–391. [Google Scholar]
- Virmavirta, M.; Isolehto, J.; Komi, P.; Brüggemann, G.P.; Müller, E.; Schwameder, H. Characteristics of the early flight phase in the Olympic ski jumping competition. J. Biomech. 2005, 38, 2157–2163. [Google Scholar] [CrossRef]
- Gardan, N.; Schneider, A.; Polidori, G.; Trenchard, H.; Seigneur, J.M.; Beaumont, F.; Fourchet, F.; Taiar, R. Numerical investigation of the early flight phase in ski-jumping. J. Biomech. 2017, 59, 29–34. [Google Scholar] [CrossRef]
- Pennycuick, C.J. A wind-tunnel study of gliding flight in the pigeon Columba livia. J. Exp. Biol. 1968, 49, 509–526. [Google Scholar] [CrossRef]
- Tucker, V.A.; Parrott, G.C. Aerodynamics of gliding flight in a falcon and other birds. J. Exp. Biol. 1970, 52, 345–367. [Google Scholar] [CrossRef]
- Norberg, U.M. Evolution of vertebrate flight: An aerodynamic model for the transition from gliding to active flight. Am. Nat. 1985, 126, 303–327. [Google Scholar] [CrossRef]
- Müller, W.; Platzer, D.; Schmölzer, B. Dynamics of human flight on skis: Improvements in safety and fairness in ski jumping. J. Biomech. 1996, 29, 1061–1068. [Google Scholar] [CrossRef]
- Lee, K.D.; Park, M.J.; Kim, K.Y. Optimization of ski jumper’s posture considering lift-to-drag ratio and stability. J. Biomech. 2012, 45, 2125–2132. [Google Scholar] [CrossRef]
- Virmavirta, M.; Kivekäs, J. Aerodynamics of an isolated ski jumping ski. Sport. Eng. 2019, 22, 8. [Google Scholar] [CrossRef] [Green Version]
- Schmölzer, B.; Müller, W. The importance of being light: Aerodynamic forces and weight in ski jumping. J. Biomech. 2002, 35, 1059–1069. [Google Scholar] [CrossRef]
- Schmölzer, B.; Müller, W. Individual flight styles in ski jumping: Results obtained during Olympic Games competitions. J. Biomech. 2005, 38, 1055–1065. [Google Scholar] [CrossRef]
- Jung, A.; Staat, M.; Müller, W. Flight style optimization in ski jumping on normal, large, and ski flying hills. J. Biomech. 2014, 47, 716–722. [Google Scholar] [CrossRef]
- Jung, A.; Müller, W.; Staat, M. Optimization of the flight technique in ski jumping: The influence of wind. J. Biomech. 2019, 88, 190–193. [Google Scholar] [CrossRef]
- Chardonnes, J.; Favre, J.; Le Callennec, B.; Cuendet, F.; Gremion, G.; Aminan, K. Automatic measurement of key ski jumping phases and temporal events with a wearable system. J. Sport Sci. 2012, 30, 53–61. [Google Scholar] [CrossRef]
- Chardonnens, J.; Favre, J.; Cuendet, F.; Gremion, G.; Aminian, K. A system to measure the kinematics during the entire ski jump sequence using inertial sensors. J. Biomech. 2013, 46, 56–62. [Google Scholar] [CrossRef]
- Chardonnens, J.; Favre, J.; Cuendet, F.; Gremion, G.; Aminian, K. Measurement of the dynamics in ski jumping using a wearable inertial sensor-based system. J. Sport. Sci. 2014, 32, 591–600. [Google Scholar] [CrossRef]
- Groh, B.H.; Warschun, F.; Deininger, M.; Kautz, T.; Martindale, C.; Eskofier, B.M. Automated ski velocity and jump length determination in ski jumping based on unobtrusive and wearable sensors. ACM J. 2017, 1, 53. [Google Scholar] [CrossRef]
- Logar, G.; Munih, M. Estimation of joint forces and moments for the inrun and take-off in ski jumping based on measurements with wearable inertial sensors. Sensors 2015, 15, 11258–11276. [Google Scholar] [CrossRef] [Green Version]
- Ohgi, Y.; Hirai, N.; Murakami, M.; Seo, K. Aerodynamic study of ski jumping flight based on inertia sensors (171). In The Engineering of Sport 7; Springer: Paris, France, 2008; pp. 157–164. [Google Scholar]
- Glowinski, S.; Łosiński, K.; Kowiański, P.; Waśkow, M.; Bryndal, A.; Grochulska, A. Inertial sensors as a tool for diagnosing discopathy lumbosacral pathologic gait: A preliminary research. Diagnostics 2020, 10, 342. [Google Scholar] [CrossRef]
- Adesida, Y.; Papi, E.; McGregor, A.H. Exploring the role of wearable technology in sport kinematics and kinetics: A systematic review. Sensors 2019, 19, 1597. [Google Scholar] [CrossRef] [Green Version]
- Link, J.; Guillaume, S.; Eskofier, B.M. Experimental Validation of Real-Time Ski Jumping Tracking System Based on Wearable Sensors. Sensors 2021, 21, 7780. [Google Scholar] [CrossRef]
- Gilgien, M.; Kröll, J.; Spörri, J.; Crivelli, P.; Müller, E. Application of dGNSS in alpine ski racing: Basis for evaluating physical demands and safety. Front. Physiol. 2018, 9, 145. [Google Scholar] [CrossRef] [Green Version]
- Gilgien, M.; Spörri, J.; Chardonnens, J.; Kröll, J.; Müller, E. Determination of external forces in alpine skiing using a differential global navigation satellite system. Sensors 2013, 13, 9821–9835. [Google Scholar] [CrossRef] [Green Version]
- Gilgien, M.; Spörri, J.; Chardonnens, J.; Kröll, J.; Limpach, P.; Müller, E. Determination of the centre of mass kinematics in alpine skiing using differential global navigation satellite systems. J. Sport. Sci. 2015, 33, 960–969. [Google Scholar] [CrossRef]
- Supej, M. D measurements of alpine skiing with an inertial sensor motion capture suit and GNSS RTK system. J. Sport. Sci. 2010, 28, 759–769. [Google Scholar] [CrossRef]
- Supej, M.; Holmberg, H.C. A new time measurement method using a high-end global navigation satellite system to analyze alpine skiing. Res. Q. Exerc. Sport 2011, 82, 400–411. [Google Scholar] [CrossRef] [PubMed]
- Blumenbach, T. High precision kinematic GPS positioning of ski jumpers. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 761–765. [Google Scholar]
- Elfmark, O.; Ettema, G.; Groos, D.; Ihlen, E.A.; Velta, R.; Haugen, P.; Braaten, S.; Gilgien, M. Performance Analysis in Ski Jumping with a Differential Global Navigation Satellite System and Video-Based Pose Estimation. Sensors 2021, 21, 5318. [Google Scholar] [CrossRef] [PubMed]
- Gilgien, M.; Spörri, J.; Limpach, P.; Geiger, A.; Müller, E. The effect of different global navigation satellite system methods on positioning accuracy in elite alpine skiing. Sensors 2014, 14, 18433–18453. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- WMA. World Medical Association Declaration of Helsinki. Ethical principles for medical research involving human subjects. Bull. World Health Organ. 2001, 79, 373. [Google Scholar]
- Skaloud, J.; Limpach, P. Synergy of CP-DGPS, accelerometry and magnetic sensors for precise trajectography in ski racing. In Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2173–2181. [Google Scholar]
- Wägli, A. Trajectory Determination and Analysis in Sports by Satellite and Inertial Navigation. 2009. Available online: https://infoscience.epfl.ch/record/129768?ln=en (accessed on 15 October 2021).







| ID | Place | Hill Size | Athletes | Gender | Perf. Level | Jumps |
|---|---|---|---|---|---|---|
| (m) | (#) | (#) | ||||
| HS77 | Einsiedeln (CH) | 77 | 6 | Female/Male | Junior | 12 |
| HS106 | Midstubakken (N) | 106 | 8 | Male | WC/COC | 38 |
| HS117 | Einsiedeln (CH) | 117 | 2 | Male | Junior | 10 |
| HS140 | Lillehammer (N) | 140 | 3 | Male | WC/COC | 33 |
| Filter | f(x,y,x) | f(x,y,x) | f(x,y,x) |
|---|---|---|---|
| (HZ) | (HZ) | (HZ) | |
| F5 | 4 | 3 | 2 |
| F6 | 2 | 3 | 2 |
| F7 | 3 | 2 | 1.5 |
| F8 | 2 | 1.5 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elfmark, O.; Ettema, G.; Jølstad, P.; Gilgien, M. Kinematic Determination of the Aerial Phase in Ski Jumping. Sensors 2022, 22, 540. https://doi.org/10.3390/s22020540
Elfmark O, Ettema G, Jølstad P, Gilgien M. Kinematic Determination of the Aerial Phase in Ski Jumping. Sensors. 2022; 22(2):540. https://doi.org/10.3390/s22020540
Chicago/Turabian StyleElfmark, Ola, Gertjan Ettema, Petter Jølstad, and Matthias Gilgien. 2022. "Kinematic Determination of the Aerial Phase in Ski Jumping" Sensors 22, no. 2: 540. https://doi.org/10.3390/s22020540
APA StyleElfmark, O., Ettema, G., Jølstad, P., & Gilgien, M. (2022). Kinematic Determination of the Aerial Phase in Ski Jumping. Sensors, 22(2), 540. https://doi.org/10.3390/s22020540