
Wireless Local Area Network Technologies as Communication Solutions for Unmanned Surface Vehicles



Abstract
:1. Introduction
2. General Architecture and Communication Requirements of UV Control System
- Remotely controlled vehicles—fully dependent on remote operator for control input;
- Semi-autonomous vehicles—capable of executing a detailed mission plan and supporting a number of automatic procedures allowing them to quickly react to most common, unplanned events, which do not require significant change in mission plan (e.g., avoiding an obstacle or stopping to prevent collision). As in many cases missions environment includes a high number of unpredictable elements, they are also frequently operated or supervised by remote control supplemented by automatic procedures to support the operator;
- Fully autonomous vehicles—capable of automatically generating their mission plan based on general objectives and automatically altering it as needed in presence of unplanned events. Fully autonomous vehicles do not require human input during normal operation.
- Authenticity—an ability to confirm of the identity of the information sender (e.g., to prevent an authorized controllers from affecting an UV)—most often implemented by message signatures;
- Integrity—a verification that information has not been modified in transmission—possibly by use of checksums or as a part of authenticity mechanisms;
- Confidentiality—preventing unauthorized recipients from accessing the content of transmitted information—implemented by means of encryption mechanisms.
3. Micro Air Vehicle Link Protocol
MAVLink over Internet Protocol
4. Radio Communication Technologies
4.1. Direct-Link Radio Technologies
4.2. Wireless Local Area Network Technologies
- Best effort—intended for bulk data transfers, with no specific real-time requirements;
- Video—appropriate for video streaming, providing high bandwidth, but allowing for increased delivery latency in overload conditions;
- Voice—making possible a low-latency, but also low-bandwidth data exchange, well suited for real-time communication and control tasks;
- Background—used for data transfers which should minimally impact traffic in other classes even in overload conditions.
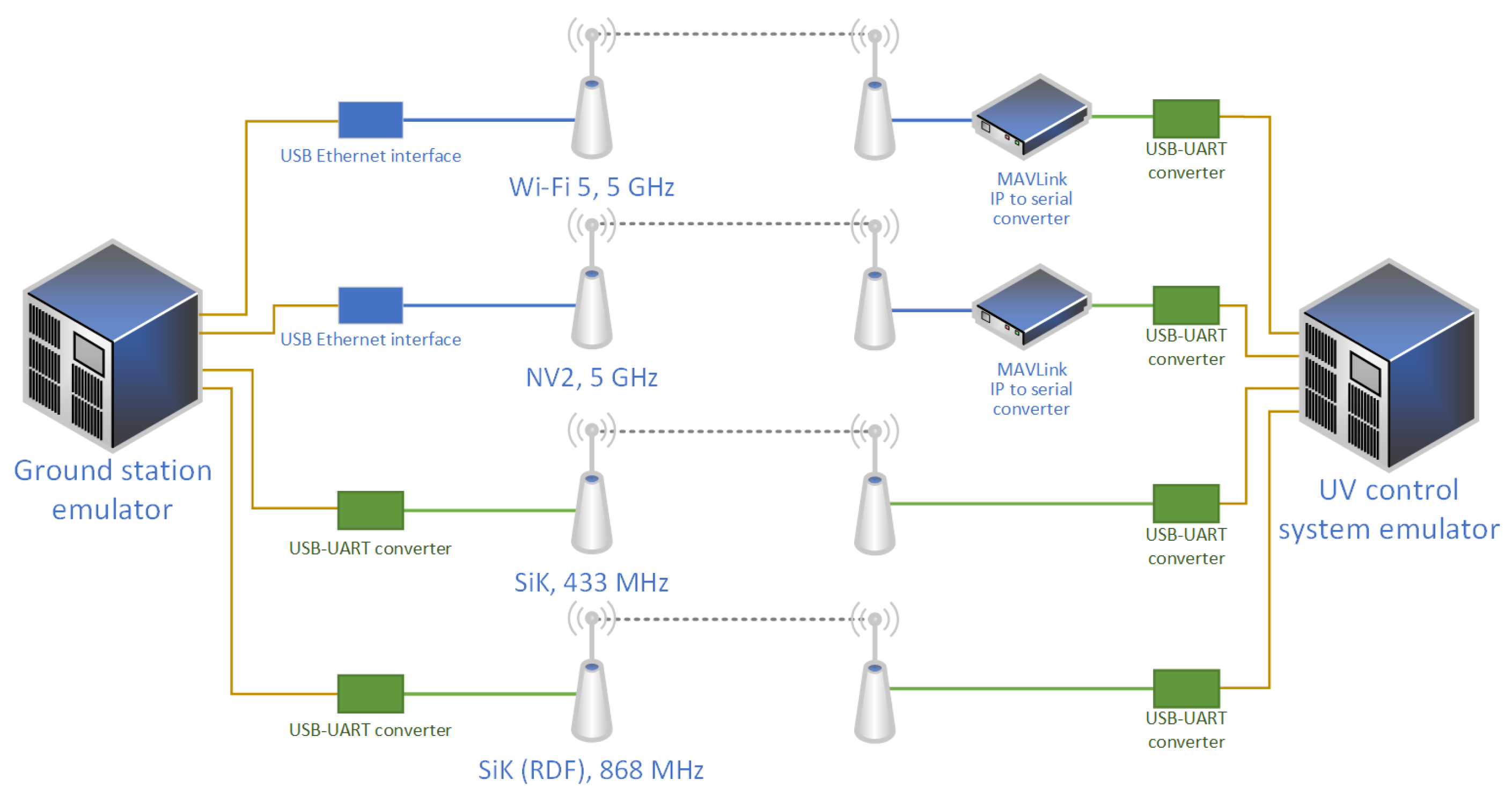
5. Test System Design
6. Experiments and Results
6.1. Laboratory Experiments
6.2. Field Deployment Experiments
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Mototolea, D. A Study On The Actual Furthermore, Upcoming Drone Communication Systems. In Proceedings of the 2019 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 11–12 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Sumari, P.; Gandomi, A.H. Applications, Deployments, and Integration of Internet of Drones (IoD): A Review. IEEE Sens. J. 2021, 21, 25532–25546. [Google Scholar] [CrossRef]
- Hayat, S.; Jung, R.; Hellwagner, H.; Bettstetter, C.; Emini, D.; Schnieders, D. Edge Computing in 5G for Drone Navigation: What to Offload? IEEE Robot. Autom. Lett. 2021, 6, 2571–2578. [Google Scholar] [CrossRef]
- Zolanvari, M.; Jain, R.; Salman, T. Potential Data Link Candidates for Civilian Unmanned Aircraft Systems: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 292–319. [Google Scholar] [CrossRef] [Green Version]
- Zolich, A.; Palma, D.; Kansanen, K.; Fjørtoft, K.; Sousa, J.; Johansson, K.H.; Jiang, Y.; Dong, H.; Johansen, T.A. Survey on communication and networks for autonomous marine systems. J. Intell. Robot. Syst. 2019, 95, 789–813. [Google Scholar] [CrossRef] [Green Version]
- Postel, J. RFC 791: Internet Protocol. Internet Requests for Comments. 1981. Available online: https://datatracker.ietf.org/doc/html/rfc791 (accessed on 1 December 2021).
- IEEE Std 802.11-2016 (Revision of IEEE Std 802.11-2012); IEEE Standard for Information technology—Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE: Piscataway, NJ, USA, 2016; pp. 1–3534. [CrossRef]
- 3GPP. Uncrewed Aerial System (UAS) Support in 3GPP. Technical Specification (TS) 22.125, 3rd Generation Partnership Project (3GPP). 2021. Version 17.4.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3545 (accessed on 1 December 2021).
- Li, Z.; Deng, Z. Data link network technology of UAV system. In Proceedings of the 2020 7th International Conference on Dependable Systems and Their Applications (DSA), Xi’an, China, 28–29 November 2020; pp. 188–189. [Google Scholar] [CrossRef]
- Zeleny, J.; Kvicera, M.; Valtr, P.; Perez-Fontan, F.; Pechac, P. State propagation channel model for 2 GHz UAV links in cluttered environment. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Yan, K.; Ma, L.; Zhang, Y. Research on the Application of 5G Technology in UAV Data Link. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; Volume 9, pp. 1115–1118. [Google Scholar] [CrossRef]
- Bai, L.; Han, R.; Liu, J.; Yu, Q.; Choi, J.; Zhang, W. Air-to-Ground Wireless Links for High-Speed UAVs. IEEE J. Sel. Areas Commun. 2020, 38, 2918–2930. [Google Scholar] [CrossRef]
- 5G!Drones. D1.1 Use Case Specifications and Requirements. Technical Report. 2019. Available online: https://5gdrones.eu/wp-content/uploads/2020/05/D1.1-Use-case-specifications-and-requirements-v1.0.pdf (accessed on 1 December 2021).
- Coelho, A.; Lopes, M.; Ferreira, B.; Campos, R.; Ricardo, M. Experimental evaluation of shore to unmanned surface vehicle Wi-Fi communications. In Proceedings of the 2018 Wireless Days (WD), Dubai, United Arab Emirates, 3–5 April 2018; pp. 86–91. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Khalighi, M.A. Channel Modeling and Parameter Optimization for Hovering UAV-Based Free-Space Optical Links. IEEE J. Sel. Areas Commun. 2018, 36, 2104–2113. [Google Scholar] [CrossRef] [Green Version]
- Habib, A.; Moh, S. Wireless Channel Models for Over-the-Sea Communication: A Comparative Study. Appl. Sci. 2019, 9, 443. [Google Scholar] [CrossRef] [Green Version]
- Hoeft, M.; Gierłowski, K.; Rak, J.; Woźniak, J. NetBaltic System-Heterogenous Wireless Network for Maritime Communications. Pol. Marit. Res. 2018, 25, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Hoeft, M.; Gierlowski, K.; Rak, J.; Wozniak, J.; Nowicki, K. Non-Satellite Broadband Maritime Communications for e-Navigation Services. IEEE Access 2021, 9, 62697–62718. [Google Scholar] [CrossRef]
- Mikrotik NV2. Available online: https://wiki.mikrotik.com/wiki/Manual:Nv2 (accessed on 1 December 2021).
- Koubâa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Atoev, S.; Kwon, K.R.; Lee, S.H.; Moon, K.S. Data analysis of the MAVLink communication protocol. In Proceedings of the 2017 International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 2–4 November 2017; pp. 1–3. [Google Scholar] [CrossRef]
- ERC Report 25. The European Table of Frequency Allocations and Applications in the Frequency Range 8.3 kHz to 3000 GHz (ECA Table); Technical Report. 2020. Available online: https://docdb.cept.org/download/2051 (accessed on 1 December 2021).
- Marine Technology. Available online: https://marinetechnology.pl/en/ (accessed on 1 December 2021).
- Dawoud, D.S.; Dawoud, P. Serial Communication Protocols and Standards RS232/485, UART/USART, SPI, USB, INSTEON, Wi-Fi and WiMAX; River Publishers: Gistrup, Denmark, 2020. [Google Scholar]
- ISO Central Secretary. Standard ISO/IEC TR 11898-1:2015; Controller Area Network (CAN)—Part 1: Data Link Layer and Physical Signalling. International Organization for Standardization: Geneva, Switzerland, 2015.
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.M.; Messina, E.; Albus, J. NIST Special Publication 1011-II-1.0 Autonomy Levels for Unmanned Systems (ALFUS) Framework Volume II: Framework Models Version 1.0 2004. Available online: https://tsapps.nist.gov/publication/get_pdf.cfm?pub_id=823618 (accessed on 1 December 2021).
- Huang, H.M. Autonomy levels for unmanned systems (ALFUS) framework: Safety and application issues. In Proceedings of the 2007 Workshop on Performance Metrics for Intelligent Systems, Washington, DC, USA, 28–30 August 2007; pp. 48–53. [Google Scholar]
- Ohseki, T.; Yamazaki, K.; Maemoto, D.; Kawai, S.; Nakata, T.; Itou, A. Data Traffic Offloading and Rate Control for Vehicles Using Radio Environment, Network Load and Route Planning. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Virtual Conference, Finland, 13–16 September 2021; pp. 1463–1468. [Google Scholar] [CrossRef]
- Kong, W.; Jia, L.; Zhou, Z.; Liao, H. Task Offloading for Vehicular Edge Computing: A Learning-Based Intent-Aware Approach. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC), Virtual Conference, China, 9–11 August 2020; pp. 651–656. [Google Scholar] [CrossRef]
- Besada, J.A.; Bergesio, L.; Campaña, I.; Vaquero-Melchor, D.; López-Araquistain, J.; Bernardos, A.M.; Casar, J.R. Drone Mission Definition and Implementation for Automated Infrastructure Inspection Using Airborne Sensors. Sensors 2018, 18, 1170. [Google Scholar] [CrossRef] [Green Version]
- Iranmanesh, S.; Raad, R. A Novel Data Forwarding Strategy for a Drone Delay Tolerant Network with Range Extension. Electronics 2019, 8, 659. [Google Scholar] [CrossRef] [Green Version]
- Munaye, Y.; Lin, H.-P.; Adege, A.B.; Tarekegn, G.B. UAV Positioning for Throughput Maximization Using Deep Learning Approaches. Sensors 2019, 19, 2775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdallah, R.; Gaber, J.; Kouta, R.; Sarraf, C.; Wack, M. Reliability of Data Transmission of UAVs. SSRN Electron. J. 2018. [Google Scholar] [CrossRef]
- Lu, Z.; Zhong, S.; Qu, L. A Switching Approach to Packet Loss Compensation Strategy. IEEE Access 2019, 7, 5609–5615. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- Haluza, M.; Čechák, J. Analysis and decoding of radio signals for remote control of drones. In Proceedings of the 2016 New Trends in Signal Processing (NTSP), Demanovska Dolina, Slovakia, 12–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, Z.; Petrunin, I.; Tsourdos, A. Modeling and Performance Analysis of Opportunistic Link Selection for UAV Communication. Sensors 2021, 21, 534. [Google Scholar] [CrossRef]
- Zimmermann, H. OSI Reference Model—The ISO Model of Architecture for Open Systems Interconnection. IEEE Trans. Commun. 1980, 28, 425–432. [Google Scholar] [CrossRef]
- Hoeft, M.; Kamiński, P.; Woźniak, J. Logical Interface for Soft Handover—An effective scheme of handovers in Proxy Mobile IPv6. In Proceedings of the 2015 8th IFIP Wireless and Mobile Networking Conference (WMNC 2015), Munich, Germany, 5–7 October 2015. [Google Scholar]
- Kumar, K.; Kumar, S.; Kaiwartya, O.; Sikandar, A.; Kharel, R.; Mauri, J.L. Internet of Unmanned Aerial Vehicles: QoS Provisioning in Aerial Ad-Hoc Networks. Sensors 2020, 20, 3160. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Liu, K. Survey of Ad-Hoc Network Technology for UAV. In Proceedings of the 2018 IEEE 18th International Conference on Communication Technology (ICCT), Chongqing, China, 8–11 October 2018; pp. 260–265. [Google Scholar] [CrossRef]
- Nazib, R.A.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle-Aided Vehicular Ad Hoc Networks: A Survey. IEEE Access 2020, 8, 77535–77560. [Google Scholar] [CrossRef]
- He, Y.; Zhai, D.; Jiang, Y.; Zhang, R. Relay Selection for UAV-Assisted Urban Vehicular Ad Hoc Networks. IEEE Wirel. Commun. Lett. 2020, 9, 1379–1383. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V.; Sabatini, R.; Ramasamy, S. UAVs Assisted Delay Optimization in Heterogeneous Wireless Networks. IEEE Commun. Lett. 2016, 20, 2526–2529. [Google Scholar] [CrossRef]
- Namvar, N.; Homaifar, A.; Karimoddini, A.; Maham, B. Heterogeneous UAV Cells: An Effective Resource Allocation Scheme for Maximum Coverage Performance. IEEE Access 2019, 7, 164708–164719. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Kent, S.; Seo, K. Security Architecture for the Internet Protocol. RFC 4301, RFC Editor. 2005. Available online: http://www.rfc-editor.org/rfc/rfc4301.txt (accessed on 1 December 2021).
- ITU. Recommendation V.250: Serial Asynchronous Automatic Dialling and Control. Technical Report. 2003. Available online: https://www.itu.int/rec/T-REC-V.250-200307-I/en (accessed on 1 December 2021).
- ETSI. TR 102 313; Electromagnetic Compatibility and Radio Spectrum Matters (ERM); Frequency-Agile Generic Short Range Devices Using Listen-before-Transmit (LBT). Version 1.1.1. ETSI: Sophia-Antipolis, France, 2004. [Google Scholar]
- IEEE Std 802.11-1997; IEEE Standard for Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. IEEE: Piscataway, NJ, USA, 1997; pp. 1–445. [CrossRef]
- IEEE Std 802.11ax-2021 (Amendment to IEEE Std 802.11-2020); IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 1: Enhancements for High-Efficiency WLAN. IEEE: Piscataway, NJ, USA, 2021; pp. 1–767. [CrossRef]
- IEEE Std 802.11ac(TM)-2013 (Amendment to IEEE Std 802.11-2012, as Amended by IEEE Std 802.11ae-2012, IEEE Std 802.11aa-2012, and IEEE Std 802.11ad-2012); IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications—Amendment 4: Enhancements for Very High Throughput for Operation in Bands below 6 GHz. IEEE: Piscataway, NJ, USA, 2013; pp. 1–425. [CrossRef]
- IEEE Std 802.11e-2005 (Amendment to IEEE Std 802.11, 1999 Edition (Reaff 2003); IEEE Standard for Information technology—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications—Amendment 8: Medium Access Control (MAC) Quality of Service Enhancements. IEEE: Piscataway, NJ, USA, 2005; pp. 1–212. [CrossRef]
- Kwon, H.; Seo, H.; Kim, S.; Lee, B.G. Generalized CSMA/CA for OFDMA systems: Protocol design, throughput analysis, and implementation issues. IEEE Trans. Wirel. Commun. 2009, 8, 4176–4187. [Google Scholar] [CrossRef]
- Laufer, R.; Kleinrock, L. The Capacity of Wireless CSMA/CA Networks. IEEE/ACM Trans. Netw. 2016, 24, 1518–1532. [Google Scholar] [CrossRef]
- Guo, X.; Li, B.; Liu, K. Performance Analysis for the CMSA/CA Protocol in UAV-based IoT network. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Miao, G.; Zander, J.; Sung, K.W.; Ben Slimane, S. Fundamentals of Mobile Data Networks; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar] [CrossRef]
- Si1000-CUltra-Low Power 64 kB, 10-bit ADC MCU with Integrated 240–960 MHz Transceiver. Available online: https://www.silabs.com/documents/public/data-shorts/Si1000-C-short.pdf (accessed on 1 December 2021).
- Mikrotik Metal 52, ac. Available online: https://mikrotik.com/product/RBMetalG-52SHPacn (accessed on 1 December 2021).
- Mikrotik mANT 15s. Available online: https://mikrotik.com/product/MTAS-5G-15D120 (accessed on 1 December 2021).
- ETSI. EN 301 893; 5 GHz RLAN; Harmonised Standard Covering the Essential Requirements of Article 3.2 of Directive 2014/53/EU. Version 2.1.1; ETSI: Sophia-Antipolis, France, 2017.
- ETSI. EN 302 220; Short Range Devices (SRD) Operating in the Frequency Range 25 MHz to 1000 MHz; Part 1: Technical Characteristics and Methods of Measurement. Version 3.1.1; ETSI: Sophia-Antipolis, France, 2017.
- Raspberry Pi 3 Model, B. Available online: https://www.raspberrypi.com/products/raspberry-pi-3-model-b/ (accessed on 1 December 2021).
- Ping Microservice. Available online: https://mavlink.io/en/services/ping.html (accessed on 1 December 2021).
- Le Roux, Y.M.; Ménard, J.; Toquin, C.; Jolivet, J.P.; Nicolas, F. Experimental measurements of propagation characteristics for maritime radio links. In Proceedings of the 2009 9th International Conference on Intelligent Transport Systems Telecommunications (ITST), Lille, France, 20–22 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 364–369. [Google Scholar]
- Lopes, M.J.; Teixeira, F.; Mamede, J.B.; Campos, R. Wi-Fi broadband maritime communications using 5.8 GHz band. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- ITU-T. Attenuation in Vegetation; Recommendation P.833.10; International Telecommunication Union: Geneva, Switzerland, 2021. [Google Scholar]
- Wozniak, J.; Machan, P.; Gierlowski, K.; Hoeft, M.; Lewczuk, M. Comparative Analysis of IP-Based Mobility Protocols and Fast Handover Algorithms in IEEE 802.11 Based WLANs. In Computer Networks; Kwiecień, A., Gaj, P., Stera, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 87–101. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Maximum Recorded Communication Distance (m) | MAVLink Message Loss Ratio | MAVLink Message Round Trip Time (s) |
|---|---|---|---|
| NV2 5 GHz | 2263 | 0.29 | 0.06 |
| Wi-Fi 5 GHz | 2264 | 0.36 | 0.06 |
| Si1000 (RFD) 868 MHz | 2264 | 0.09 | 0.28 |
| Si1000 433 MHz | 890 | 0.90 | 0.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stateczny, A.; Gierlowski, K.; Hoeft, M. Wireless Local Area Network Technologies as Communication Solutions for Unmanned Surface Vehicles. Sensors 2022, 22, 655. https://doi.org/10.3390/s22020655
Stateczny A, Gierlowski K, Hoeft M. Wireless Local Area Network Technologies as Communication Solutions for Unmanned Surface Vehicles. Sensors. 2022; 22(2):655. https://doi.org/10.3390/s22020655
Chicago/Turabian StyleStateczny, Andrzej, Krzysztof Gierlowski, and Michal Hoeft. 2022. "Wireless Local Area Network Technologies as Communication Solutions for Unmanned Surface Vehicles" Sensors 22, no. 2: 655. https://doi.org/10.3390/s22020655
APA StyleStateczny, A., Gierlowski, K., & Hoeft, M. (2022). Wireless Local Area Network Technologies as Communication Solutions for Unmanned Surface Vehicles. Sensors, 22(2), 655. https://doi.org/10.3390/s22020655