
Enhanced Recognition of Amputated Wrist and Hand Movements by Deep Learning Method Using Multimodal Fusion of Electromyography and Electroencephalography

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
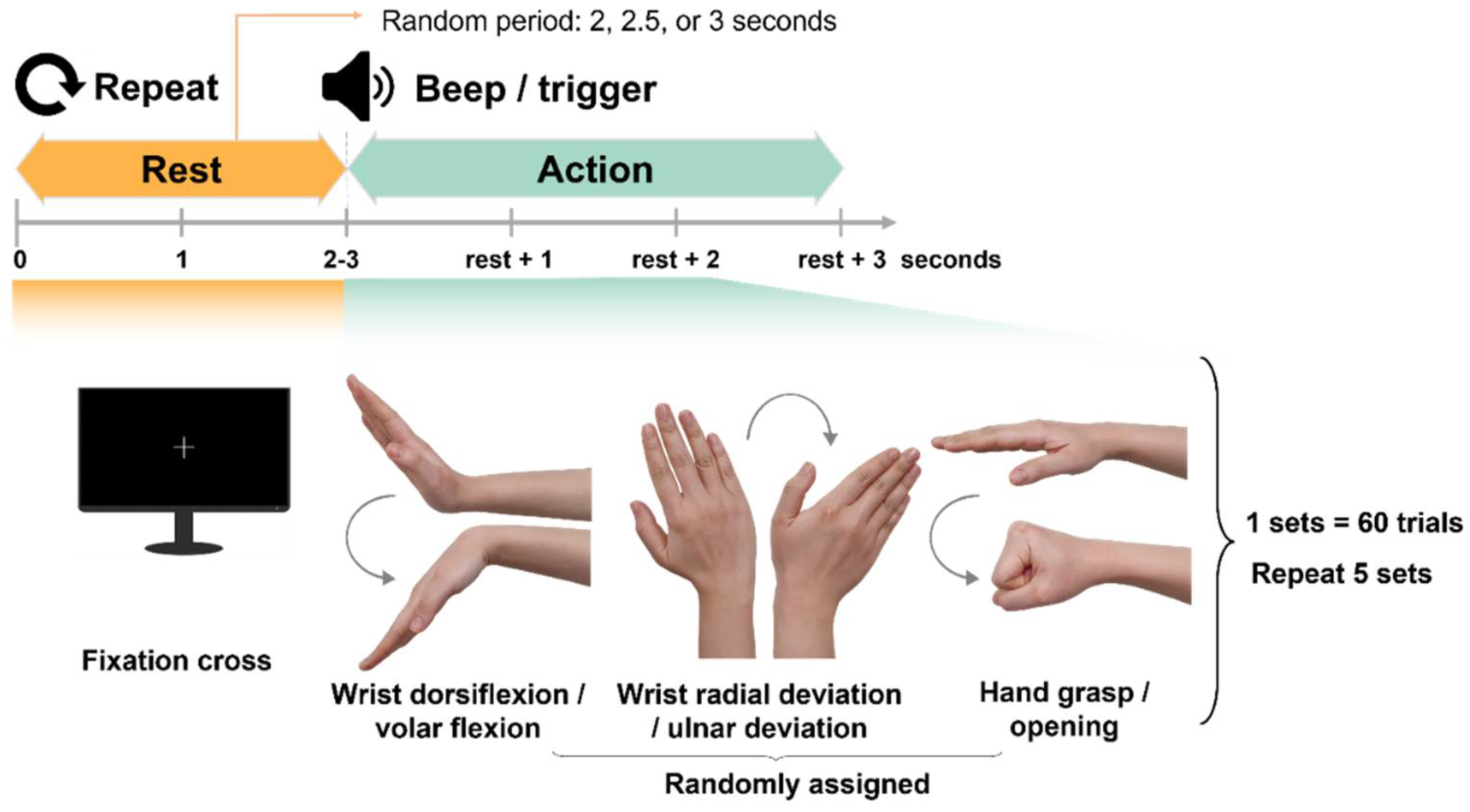
2.1. Experimental Procedures
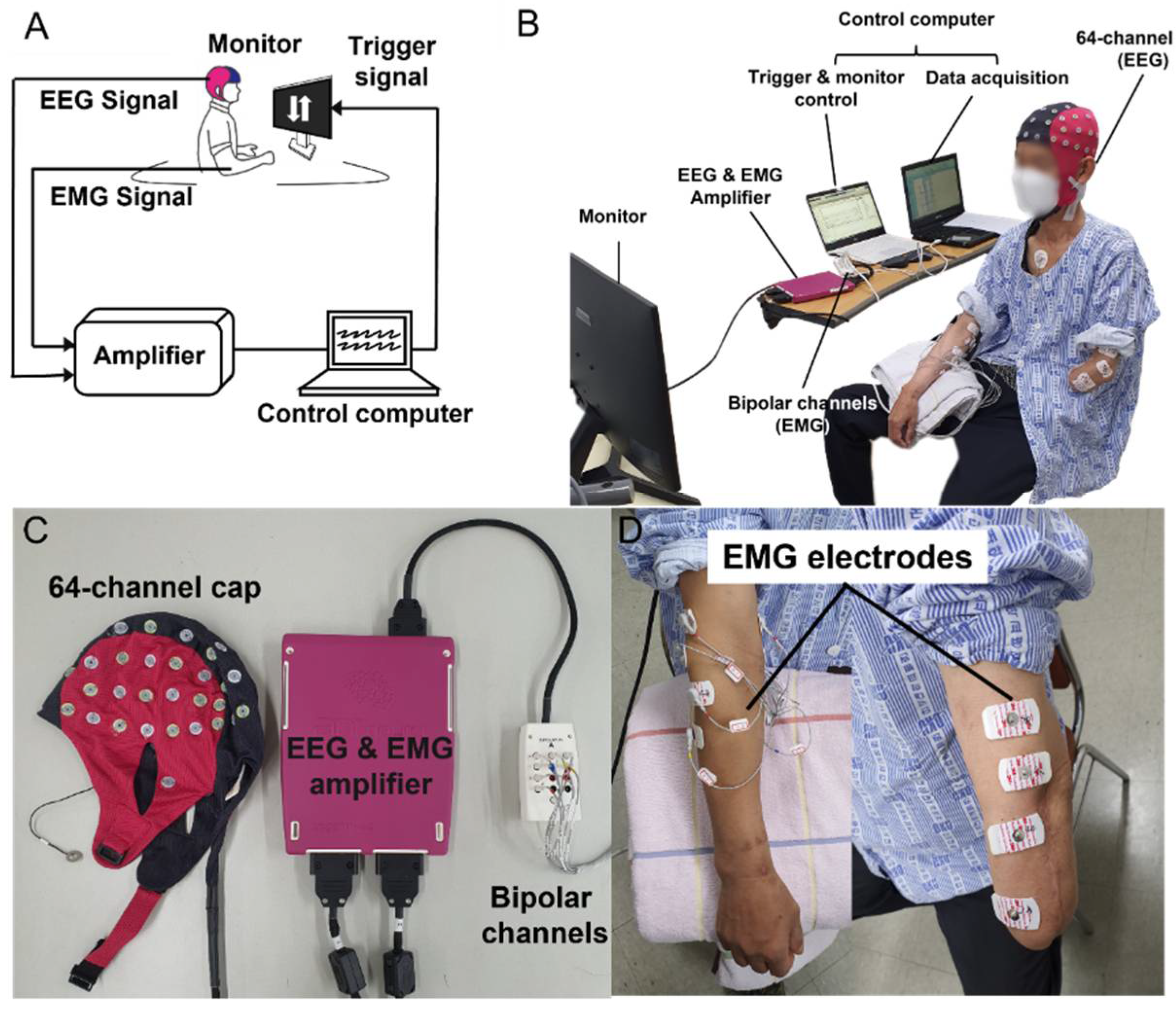
2.2. Experimental Setup
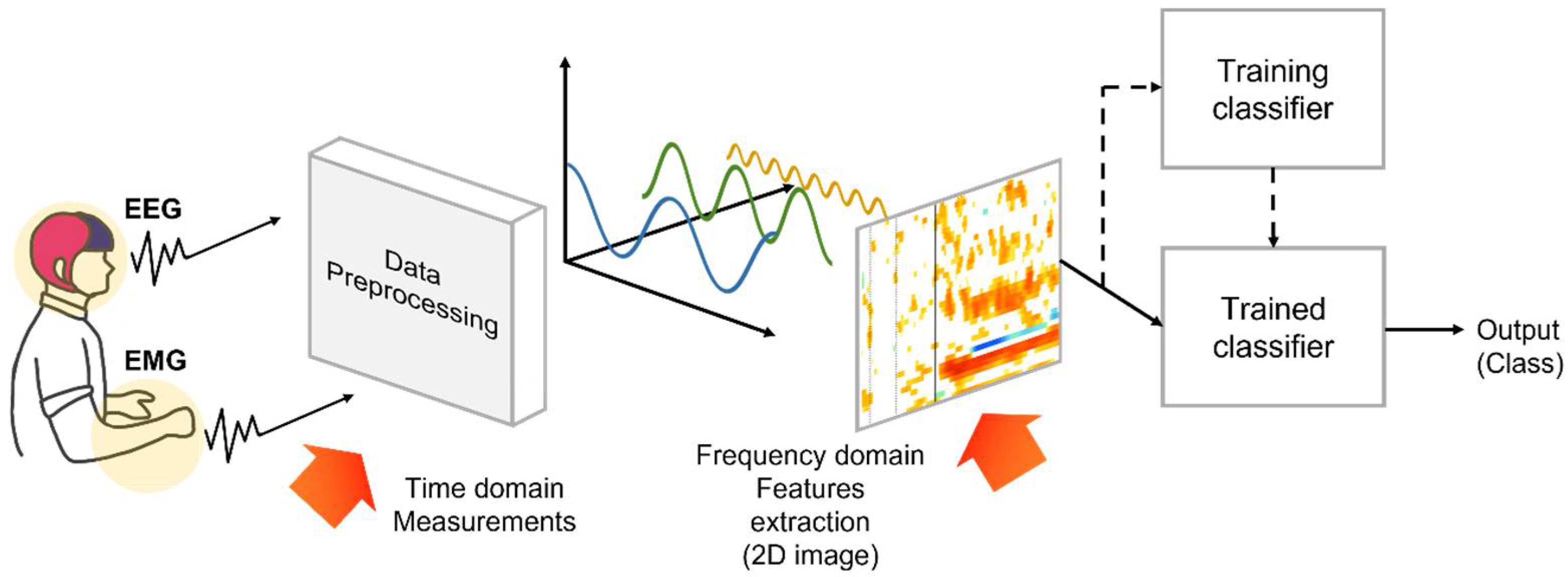
2.3. Data Preprocessing
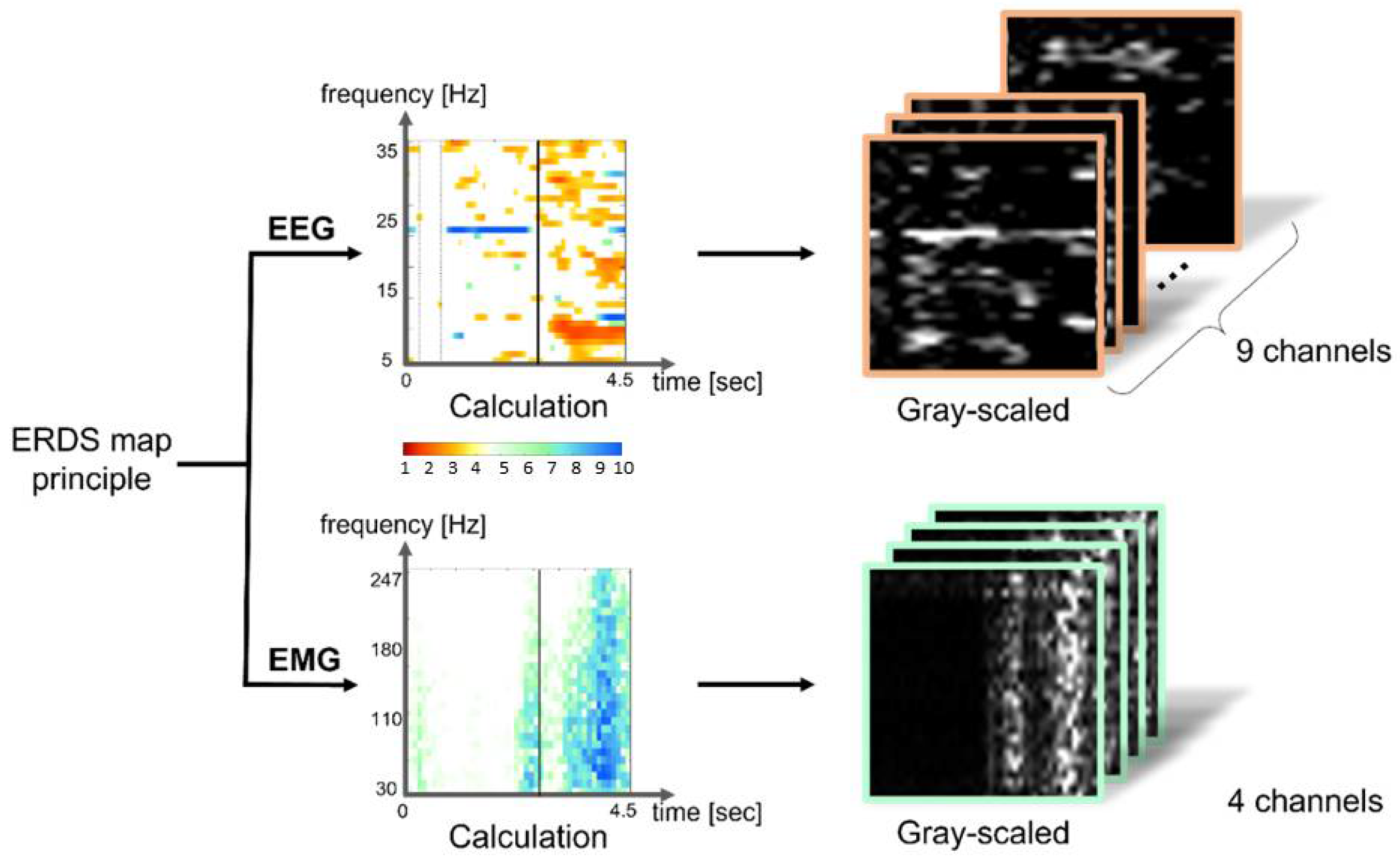
2.4. Feature Extraction
2.5. Motion Classification
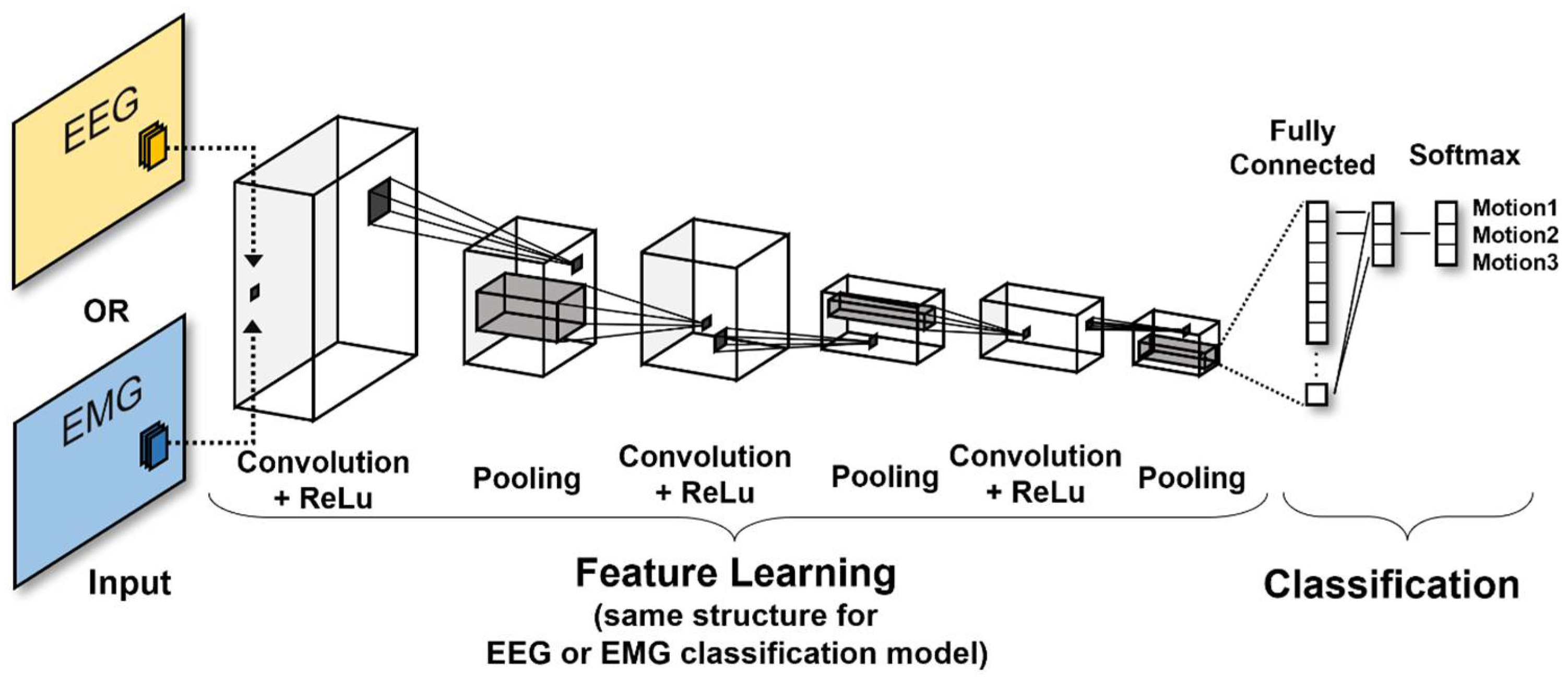
2.5.1. Convolutional Network
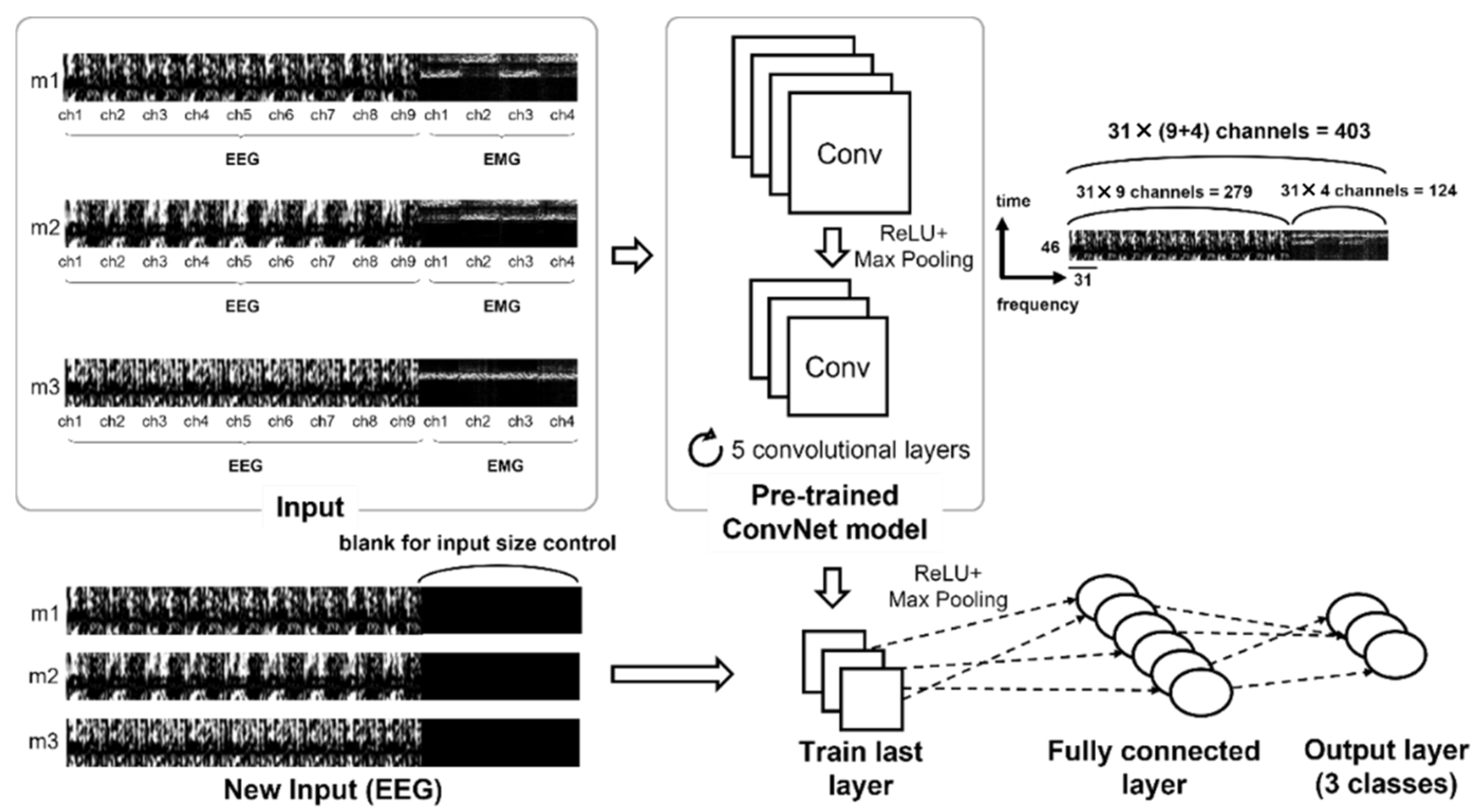
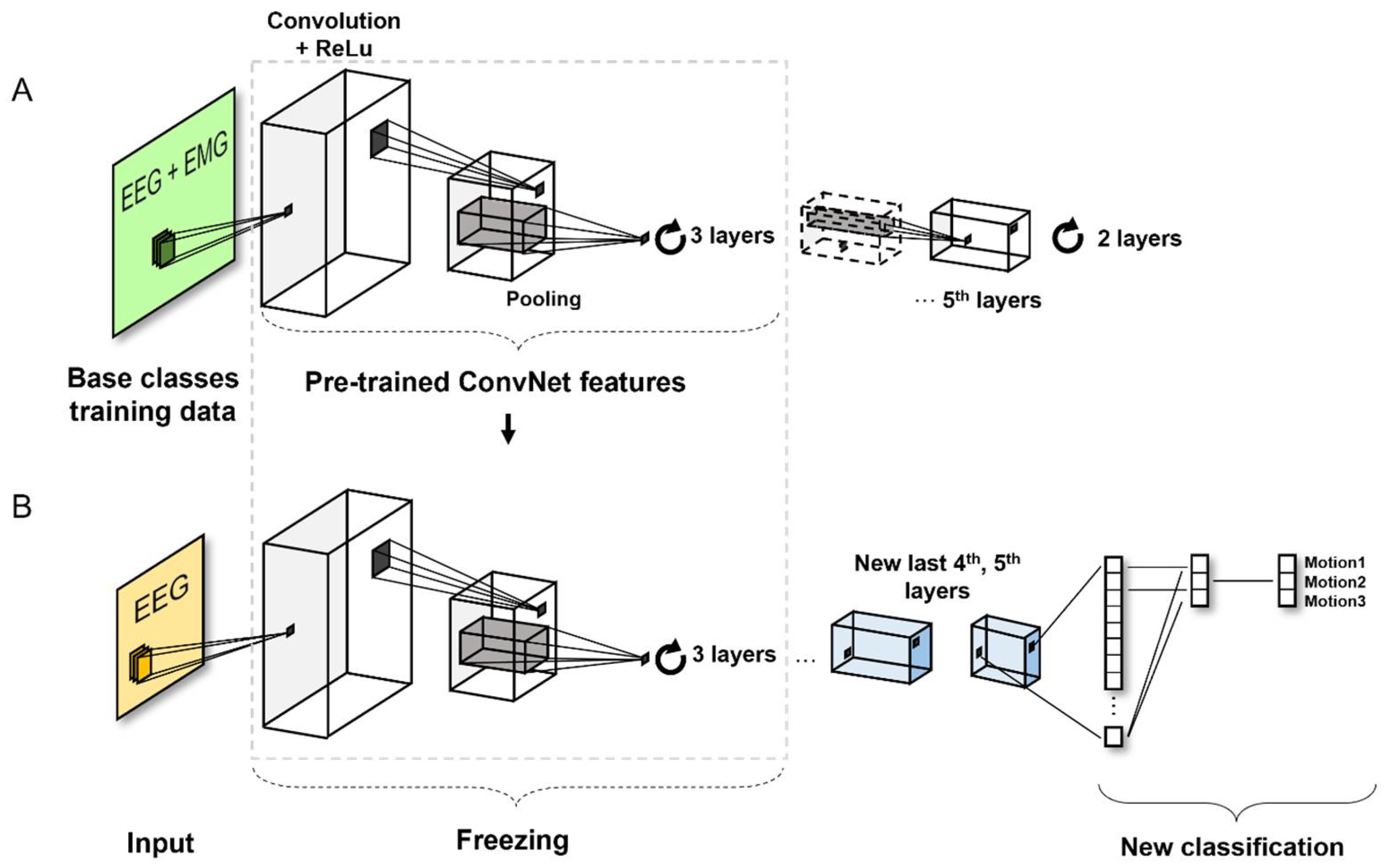
2.5.2. Pretrained CNN for TL
2.5.3. TL Model
2.6. Statistics
3. Results
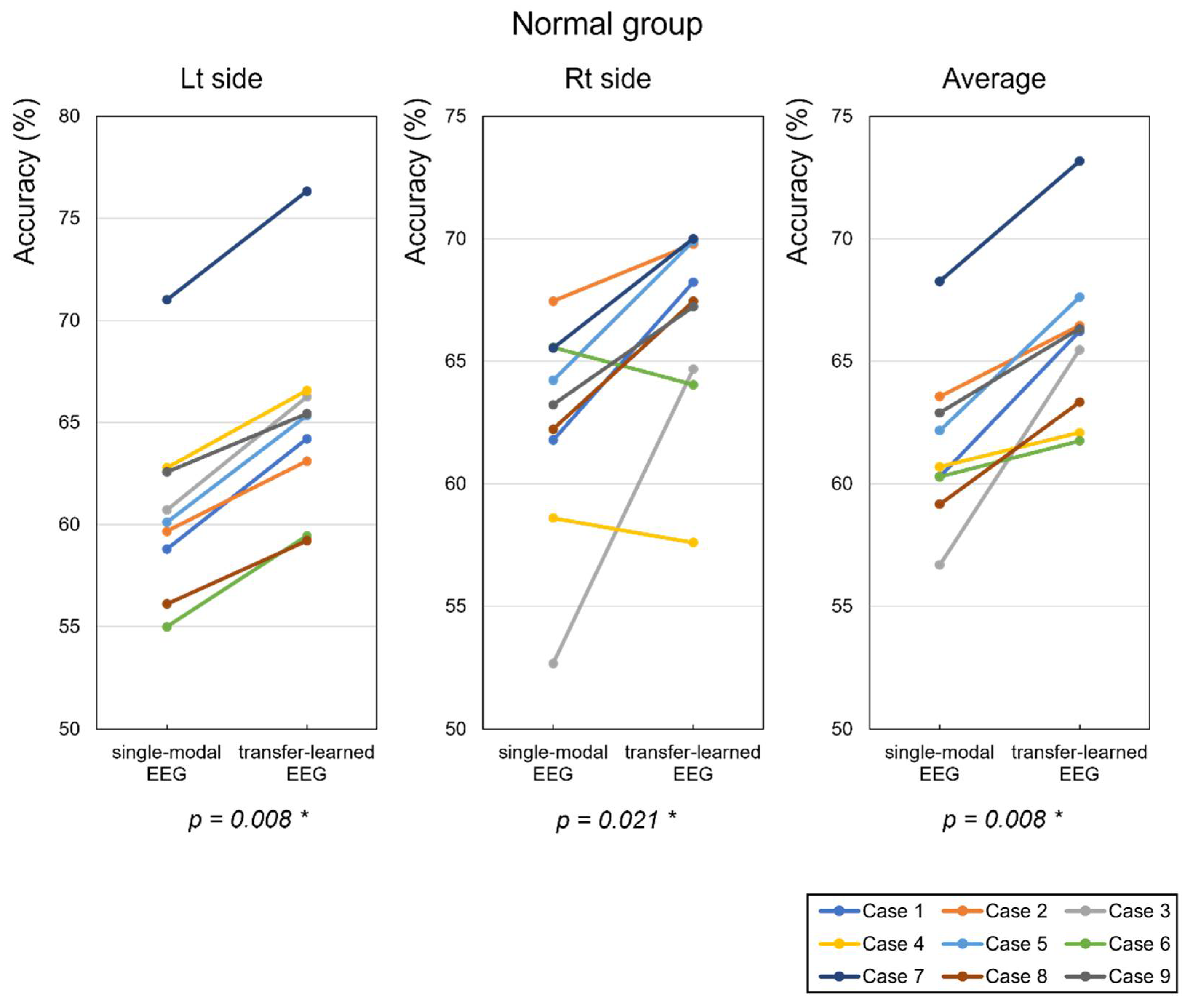
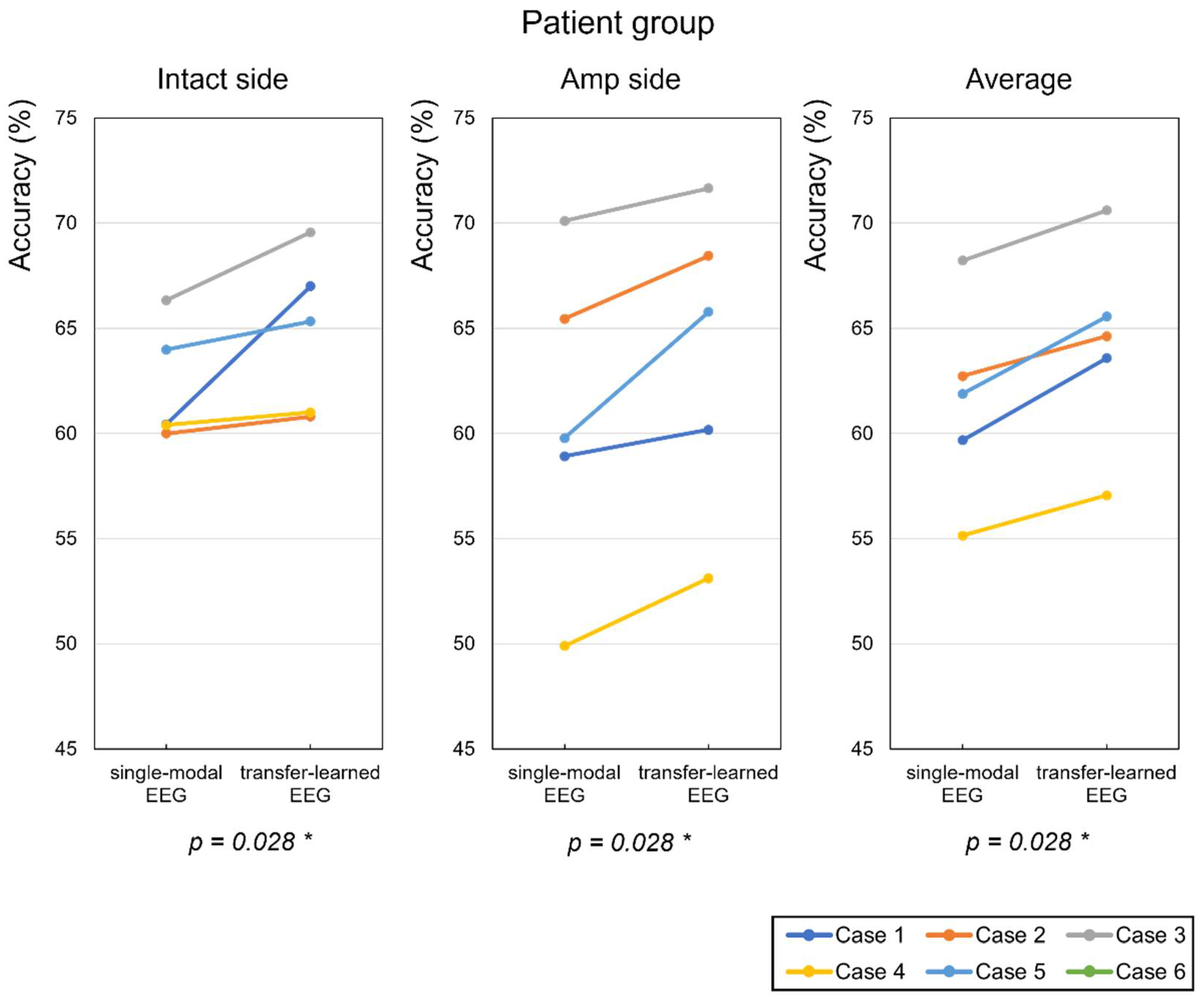
Average Classification Performance of Single-Modal and Multimodal Models
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ziegler-Graham, K.; MacKenzie, E.J.; Ephraim, P.L.; Travison, T.G.; Brookmeyer, R. Estimating the Prevalence of Limb Loss in the United States: 2005 to 2050. Arch. Phys. Med. Rehabil. 2008, 89, 422–429. [Google Scholar] [CrossRef]
- Inkellis, E.; Low, E.E.; Langhammer, C.; Morshed, S. Incidence and Characterization of Major Upper-Extremity Amputations in the National Trauma Data Bank. JB JS Open Access 2018, 3, e0038. [Google Scholar] [CrossRef] [PubMed]
- Darter, B.J.; Hawley, C.E.; Armstrong, A.J.; Avellone, L.; Wehman, P. Factors Influencing Functional Outcomes and Return-to-Work After Amputation: A Review of the Literature. J. Occup. Rehabil. 2018, 28, 656–665. [Google Scholar] [CrossRef]
- Ball, N.; Heger, H.; Hunter, G. The below-elbow myo-electric prosthesis. A comparison of the Otto Bock myo-electric prosthesis with the hook and functional hand. J. Bone Jt. Surgery. Br. Vol. 1980, 62, 363–367. [Google Scholar] [CrossRef]
- Schweitzer, W.; Thali, M.J.; Egger, D. Case-study of a user-driven prosthetic arm design: Bionic hand versus customized body-powered technology in a highly demanding work environment. J. Neuroeng. Rehabil. 2018, 15, 1. [Google Scholar] [CrossRef] [Green Version]
- LUKE Arm Detail Page—Mobius Bionics. Available online: http://www.mobiusbionics.com/luke-arm/ (accessed on 1 December 2021).
- User Brochure: I-Limb Quantum. Touch Bionics. Available online: https://training.touchbionics.com/index-en.html (accessed on 1 December 2021).
- Pohlmeyer, E.A.; Fifer, M.; Rich, M.; Pino, J.; Wester, B.; Johannes, M.; Dohopolski, C.; Helder, J.; D’Angelo, D.; Beaty, J.; et al. Beyond intuitive anthropomorphic control: Recent achievements using brain computer interface technologies. In Micro-and Nanotechnology Sensors, Systems, and Applications IX; International Society for Optics and Photonics: Bellingham, WA, USA, 2017. [Google Scholar]
- Chen, C.; Yu, Y.; Ma, S.; Sheng, X.; Lin, C.; Farina, D.; Zhu, X. Hand gesture recognition based on motor unit spike trains decoded from high-density electromyography. Biomed. Signal Process. Control. 2019, 55, 101637. [Google Scholar] [CrossRef]
- Farina, D.; Vujaklija, I.; Sartori, M.; Kapelner, T.; Negro, F.; Jiang, N.; Bergmeister, K.; Andalib, A.; Principe, J.; Aszmann, O.C. Man/machine interface based on the discharge timings of spinal motor neurons after targeted muscle reinnervation. Nat. Biomed. Eng. 2017, 1, 25. [Google Scholar] [CrossRef] [Green Version]
- Resnik, L.; Huang, H.H.; Winslow, A.; Crouch, D.L.; Zhang, F.; Wolk, N. Evaluation of EMG pattern recognition for upper limb prosthesis control: A case study in comparison with direct myoelectric control. J. Neuroeng. Rehabil. 2018, 15, 23. [Google Scholar] [CrossRef] [PubMed]
- Varrecchia, T.; D’Anna, C.; Schmid, M.; Conforto, S. Generalization of a wavelet-based algorithm to adaptively detect activation intervals in weak and noisy myoelectric signals. Biomed. Signal Process. Control. 2020, 58, 101838. [Google Scholar] [CrossRef]
- Jang, C.H.; Yang, H.S.; Yang, H.E.; Lee, S.Y.; Kwon, J.W.; Yun, B.D.; Choi, J.Y.; Kim, S.N.; Jeong, H.W. A Survey on Activities of Daily Living and Occupations of Upper Extremity Amputees. Ann. Rehabil. Med. 2011, 35, 907–921. [Google Scholar] [CrossRef] [PubMed]
- Østlie, K.; Lesjø, I.M.; Franklin, R.J.; Garfelt, B.; Skjeldal, O.H.; Magnus, P. Prosthesis rejection in acquired major upper-limb amputees: A population-based survey. Disabil. Rehabil. Assist. Technol. 2011, 7, 294–303. [Google Scholar] [CrossRef] [PubMed]
- Andersen, R.A.; Aflalo, T.; Kellis, S. From thought to action: The brain–machine interface in posterior parietal cortex. Proc. Natl. Acad. Sci. USA 2019, 116, 26274–26279. [Google Scholar] [CrossRef] [Green Version]
- Uejima, T.; Kita, K.; Fujii, T.; Kato, R.; Takita, M.; Yokoi, H. Motion classification using epidural electrodes for low-invasive brain-machine interface. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6469–6472. [Google Scholar]
- Shih, J.J.; Krusienski, D.J.; Wolpaw, J. Brain-Computer Interfaces in Medicine. Mayo Clin. Proc. 2012, 87, 268–279. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dyrholm, M.; Makeig, S.; Hansen, L.K. Model Selection for Convolutive ICA with an Application to Spatiotemporal Analysis of EEG. Neural Comput. 2007, 19, 934–955. [Google Scholar] [CrossRef]
- Khan, S.M.; Khan, A.A.; Farooq, O. Selection of Features and Classifiers for EMG-EEG-Based Upper Limb Assistive Devices—A Review. IEEE Rev. Biomed. Eng. 2020, 13, 248–260. [Google Scholar] [CrossRef] [PubMed]
- Lu, N.; Li, T.; Ren, X.; Miao, H. A Deep Learning Scheme for Motor Imagery Classification based on Restricted Boltzmann Machines. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 566–576. [Google Scholar] [CrossRef] [PubMed]
- Aflalo, T.; Kellis, S.; Klaes, C.; Lee, B.; Shi, Y.; Pejsa, K.; Shanfield, K.; Hayes-Jackson, S.; Aisen, M.; Heck, C.; et al. Decoding motor imagery from the posterior parietal cortex of a tetraplegic human. Science 2015, 348, 906–910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, X.; Cao, Z.; Jolfaei, A.; Xu, P.; Wu, D.; Jung, T.-P.; Lin, C.-T. EEG-Based Brain-Computer Interfaces (BCIs): A Survey of Recent Studies on Signal Sensing Technologies and Computational Intelligence Approaches and Their Applications. IEEE/ACM Trans. Comput. Biol. Bioinform. 2021, 18, 1645–1666. [Google Scholar] [CrossRef]
- Quitadamo, L.R.; Cavrini, F.; Sbernini, L.; Riillo, F.; Bianchi, L.; Seri, S.; Saggio, G. Support vector machines to detect physiological patterns for EEG and EMG-based human–computer interaction: A review. J. Neural Eng. 2017, 14, 011001. [Google Scholar] [CrossRef] [PubMed]
- Ebrahimi, F.; Mikaeili, M.; Estrada, E.; Nazeran, H. Automatic sleep stage classification based on EEG signals by using neural networks and wavelet packet coefficients. In Proceedings of the 2008 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Vancouver, BC, Canada, 20–25 August 2008; pp. 1151–1154. [Google Scholar] [CrossRef]
- Said, A.B.; Mohamed, A.; Elfouly, T.; Harras, K.; Wang, Z.J. Multimodal Deep Learning Approach for Joint EEG-EMG Data Compression and Classification. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017. [Google Scholar]
- Nikkonen, S.; Korkalainen, H.; Kainulainen, S.; Myllymaa, S.; Leino, A.; Kalevo, L.; Oksenberg, A.; Leppänen, T.; Töyräs, J. Estimating daytime sleepiness with previous night electroencephalography, electrooculography, and electromyography spectrograms in patients with suspected sleep apnea using a convolutional neural network. Sleep 2020, 43, zsaa106. [Google Scholar] [CrossRef] [PubMed]
- Meng, J.; Zhang, S.; Bekyo, A.; Olsoe, J.; Baxter, B.; He, B. Noninvasive Electroencephalogram Based Control of a Robotic Arm for Reach and Grasp Tasks. Sci. Rep. 2016, 6, 38565. [Google Scholar] [CrossRef] [Green Version]
- Perotto, A.O. Anatomical Guide for the Electromyographer: The Limbs and Trunk, 5th ed.; Charles C Thomas Pub Ltd.: Springfield, IL, USA, 2011. [Google Scholar]
- Vidaurre, C.; Sander, T.H.; Schlögl, A. BioSig: The Free and Open Source Software Library for Biomedical Signal Processing. Comput. Intell. Neurosci. 2011, 2011, 935364. [Google Scholar] [CrossRef] [Green Version]
- Park, T.; Lee, M.; Jeong, T.; Shin, Y.-I.; Park, S.-M. Quantitative Analysis of EEG Power Spectrum and EMG Median Power Frequency Changes after Continuous Passive Motion Mirror Therapy System. Sensors 2020, 20, 2354. [Google Scholar] [CrossRef] [Green Version]
- Jenson, D.; Bowers, A.L.; Hudock, D.; Saltuklaroglu, T. The Application of EEG Mu Rhythm Measures to Neurophysiological Research in Stuttering. Front. Hum. Neurosci. 2019, 13, 458. [Google Scholar] [CrossRef] [Green Version]
- Hervault, M.; Zanone, P.-G.; Buisson, J.-C.; Huys, R. Cortical sensorimotor activity in the execution and suppression of discrete and rhythmic movements. Sci. Rep. 2021, 11, 22364. [Google Scholar] [CrossRef]
- De Luca, C.J. Surface Electromyography: Detection and Recording; DelSys Incorporated: Natick, MA, USA, 2002. [Google Scholar]
- Rawat, W.; Wang, Z. Deep Convolutional Neural Networks for Image Classification: A Comprehensive Review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How transferable are features in deep neural networks?. arXiv preprint arXiv:1411.1792. In Proceedings of the Advances in Neural Information Processing Systems 27 (NIPS 2014), Montréal, QC, Canada, 8–13 December 2014. [Google Scholar]
- Marcelino, P. Transfer Learning from Pre-Trained Models. Available online: https://towardsdatascience.com/transfer-learning-from-pre-trained-models-f2393f124751 (accessed on 23 October 2021).
- Samuel, O.W.; Zhou, H.; Li, X.; Wang, H.; Zhang, H.; Sangaiah, A.K.; Li, G. Pattern recognition of electromyography signals based on novel time domain features for amputees’ limb motion classification. Comput. Electr. Eng. 2018, 67, 646–655. [Google Scholar] [CrossRef]
- Chen, T.; Moreau, T.; Jiang, Z.; Zheng, L.; Yan, E.; Shen, H.; Cowan, M.; Wang, L.; Hu, Y.; Ceze, L.; et al. TVM: An Automated End-to-End Optimizing Compiler for Deep Learning. In Proceedings of Proceedings of the 13th USENIX Symposium on Operating Systems Design and Implementation; Carlsbad, CA, USA, 8–10 October 2018.
- Gunduz, M.E.; Pinto, C.B.; Velez, F.G.S.; Duarte, D.; Pacheco-Barrios, K.; Lopes, F.; Fregni, F. Motor Cortex Reorganization in Limb Amputation: A Systematic Review of TMS Motor Mapping Studies. Front. Neurosci. 2020, 14, 314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wright, F.; Hubbard, S.; Naumann, S.; Jutai, J. Evaluation of the validity of the prosthetic upper extremity functional index for children. Arch. Phys. Med. Rehabil. 2003, 84, 518–527. [Google Scholar] [CrossRef]
- Nweke, H.F.; Teh, Y.W.; Mujtaba, G.; Alo, U.R.; Al-Garadi, M.A. Multi-sensor fusion based on multiple classifier systems for human activity identification. Hum.-Cent. Comput. Inf. Sci. 2019, 9, 1–44. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhou, M.; Dai, C.; Chen, W.; Ye, X. Generalized Finger Motion Classification Model Based on Motor Unit Voting. Mot. Control. 2020, 25, 100–116. [Google Scholar] [CrossRef] [PubMed]
- Dai, C.; Hu, X. Finger Joint Angle Estimation Based on Motoneuron Discharge Activities. IEEE J. Biomed. Health Inform. 2019, 24, 760–767. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Samuel, O.W.; Zhang, X.; Wang, H.; Fang, P.; Li, G. A motion-classification strategy based on sEMG-EEG signal combination for upper-limb amputees. J. Neuroeng. Rehabil. 2017, 14, 2. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paek, A.Y.; Gailey, A.; Parikh, P.J.; Santello, M.; Contreras-Vidal, J.L. Regression-based reconstruction of human grip force trajectories with noninvasive scalp electroencephalography. J. Neural Eng. 2019, 16, 066030. [Google Scholar] [CrossRef]
- Makin, T.R.; Flor, H. Brain (re)organisation following amputation: Implications for phantom limb pain. NeuroImage 2020, 218, 116943. [Google Scholar] [CrossRef] [PubMed]
- Begum, S.; Barua, S.; Ahmed, M.U. Physiological Sensor Signals Classification for Healthcare Using Sensor Data Fusion and Case-Based Reasoning. Sensors 2014, 14, 11770–11785. [Google Scholar] [CrossRef] [Green Version]
- Sze, V.; Chen, Y.-H.; Yang, T.-J.; Emer, J.S. Efficient Processing of Deep Neural Networks: A Tutorial and Survey. Proc. IEEE 2017, 105, 2295–2329. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Sohail, A.; Zahoora, U.; Qureshi, A.S. A survey of the recent architectures of deep convolutional neural networks. Artif. Intell. Rev. 2020, 53, 5455–5516. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Subject | Lt. Side | Rt. Side | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Single-Modal EEG | Multi-Modal EEG and EMG | Transfer-Learned EEG | EEG Difference before and after Training | p-Value | Single-Modal EEG | Multi-Modal EEG and EMG | Transfer-Learned EEG | EEG Difference before and after Training | p-Value | ||
| Control | Case 1 | 58.8 | 91.6 | 64.2 | 5.4 | 61.78 | 79.33 | 68.22 | 6.44 | ||
| Case 2 | 59.67 | 94.11 | 63.11 | 3.44 | 67.45 | 90.22 | 69.78 | 2.33 | |||
| Case 3 | 60.71 | 91.43 | 66.25 | 5.54 | 52.67 | 87.67 | 64.67 | 12 | |||
| Case 4 | 62.78 | 92.67 | 66.56 | 3.78 | 58.6 | 87.8 | 57.6 | -1 | |||
| Case 5 | 60.11 | 88.18 | 65.33 | 5.22 | 64.22 | 87.89 | 69.89 | 5.67 | |||
| Case 6 | 55 | 89.89 | 59.45 | 4.45 | 65.56 | 87.98 | 64.04 | -1.52 | |||
| Case 7 | 71 | 83.67 | 76.33 | 5.33 | 65.53 | 82.89 | 70 | 4.47 | |||
| Case 8 | 56.11 | 74.33 | 59.21 | 3.1 | 62.22 | 89.56 | 67.44 | 5.22 | |||
| Case 9 | 62.57 | 81.57 | 65.43 | 2.86 | 63.22 | 80 | 67.22 | 4 | |||
| Mean ± SD | 60.75 ± 4.64 | 87.49 ± 6.44 | 65.10 ± 5.01 | 4.35 ± 1.07 | 0.008 * | 62.36 ± 4.46 | 85.93 ± 4.09 | 66.54 ± 3.99 | 4.18 ± 4.07 | 0.021 * | |
| Patient | Subject | Intact side | Amputated side | ||||||||
| single-modal EEG | multi-modal EEG and EMG | transfer-learned EEG | EEG difference before and after training | p-value | single-modal EEG | multi-modal EEG and EMG | transfer-learned EEG | EEG difference before and after training | p-value | ||
| Case 1 | 60.44 | 86.56 | 67 | 6.56 | 58.92 | 79.64 | 60.17 | 1.25 | |||
| Case 2 | 60 | 77.5 | 60.8 | 0.8 | 65.45 | 85.11 | 68.45 | 3 | |||
| Case 3 | 66.33 | 79.78 | 69.56 | 3.23 | 70.11 | 87.33 | 71.66 | 1.55 | |||
| Case 4 | 60.4 | 79.6 | 61 | 0.6 | 49.89 | 77.33 | 53.11 | 3.22 | |||
| Case 5 | 63.99 | 87 | 65.33 | 1.34 | 59.78 | 77.33 | 65.78 | 6 | |||
| Mean ± SD | 62.23 ± 2.80 | 82.09 ± 4.38 | 64.74 ± 3.81 | 2.51 ± 2.49 | 0.028 * | 60.83 ± 7.61 | 81.35 ± 4.61 | 63.83 ± 7.33 | 3.00 ± 1.89 | 0.028 * | |
| p-value | 0.766 | 0.037 ** | 0.628 | 0.205 | 0.823 | 0.031 ** | 0.881 | 0.233 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Shin, D.Y.; Kim, T.; Lee, S.; Hyun, J.K.; Park, S.-M. Enhanced Recognition of Amputated Wrist and Hand Movements by Deep Learning Method Using Multimodal Fusion of Electromyography and Electroencephalography. Sensors 2022, 22, 680. https://doi.org/10.3390/s22020680
Kim S, Shin DY, Kim T, Lee S, Hyun JK, Park S-M. Enhanced Recognition of Amputated Wrist and Hand Movements by Deep Learning Method Using Multimodal Fusion of Electromyography and Electroencephalography. Sensors. 2022; 22(2):680. https://doi.org/10.3390/s22020680
Chicago/Turabian StyleKim, Sehyeon, Dae Youp Shin, Taekyung Kim, Sangsook Lee, Jung Keun Hyun, and Sung-Min Park. 2022. "Enhanced Recognition of Amputated Wrist and Hand Movements by Deep Learning Method Using Multimodal Fusion of Electromyography and Electroencephalography" Sensors 22, no. 2: 680. https://doi.org/10.3390/s22020680
APA StyleKim, S., Shin, D. Y., Kim, T., Lee, S., Hyun, J. K., & Park, S.-M. (2022). Enhanced Recognition of Amputated Wrist and Hand Movements by Deep Learning Method Using Multimodal Fusion of Electromyography and Electroencephalography. Sensors, 22(2), 680. https://doi.org/10.3390/s22020680