
WiFi Indoor Location Based on Area Segmentation
Abstract
:1. Introduction
- (1)
- Since people usually place WiFi in a specific place to obtain a stronger and denser WiFi signal in commonly used places, this habit is used to divide the dataset into core points and edge points according to the signal density of WiFi. Different positioning algorithms are used for different regions, which can achieve higher positioning accuracy in commonly used places and save positioning time in less commonly used places.
- (2)
- The adaptive learning rate algorithm is integrated into the DNN network to solve the problem that the learning rate parameter is difficult to adjust. At the same time, the stacked autoencoder (SAE) is used to reduce the dimension of the data to solve the problem that the dimension of the dataset is too high. Using a positioning algorithm that incorporates an adaptive learning rate algorithm and DNN network with SAE as the core point, the positioning accuracy does not exceed 1.5 m with a probability of less than 98.8%.
- (3)
- Since we use a high-precision positioning algorithm at the core point, which sacrifices the positioning time, we use the random forest algorithm as the positioning algorithm at the edge point. Although the positioning accuracy does not exceed 1.5 m with a probability of less than 87.2%, the positioning time is only 32 ms. If the user is at the edge point, the location information can be obtained in a short time.
2. Related Work
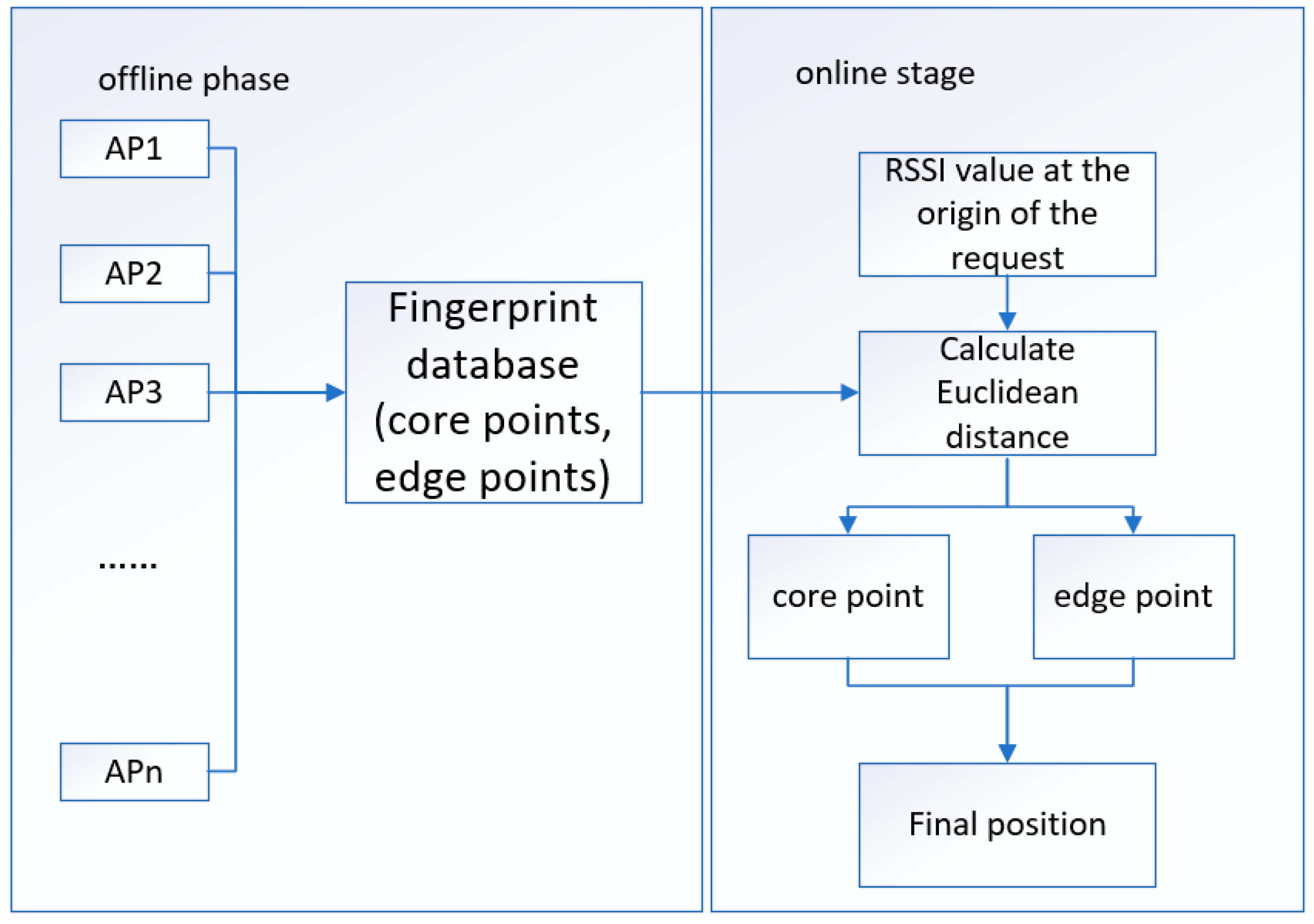
2.1. WiFi Positioning System Framework
2.2. Related Literature
3. Proposed System Structure
3.1. Dataset Introduction
- 001~520 RSSI Levels
- 521~523 Real world coordinates of the sample points
- 524 Building ID
- 525 Space ID
- 526 Relative position with respect to Space ID
- 527 User ID
- 528 Phone ID
- 529 Timestamp
- (1)
- RSSI Levels: The more important information in the WiFi information is the detected RSSI value. 98% of the data in the database belong to the RSSI value, of which −100 dbm is equivalent to a very weak signal, which can be considered as the point where no signal is detected, while 0 dbm means that a very good signal is detected.
- (2)
- Real world coordinates: Vectors 521 to 523 record longitude coordinates, latitude coordinates, and the floor of the building.
- (3)
- Space identifiers: Building ID, Vector 524 is the integer value (from 0 to 2) corresponding to the building from which the RSSI value is obtained. Space ID, Vector 525 is used to identify in a specific space (office, laboratory, etc.). Relative position with respect to Space ID, Vector 526 is used to indicate whether the location where the RSSI value is obtained is in the interior space of the corridor.
- (4)
- User ID: Containing an integer value from 1 to 18, the vector 527 is used to represent the 18 different users who collected RSSI values.
- (5)
- Phone ID: Vector 528 contains different integer values to represent different Android devices used to collect RSSI values.
- (6)
- Timestamp: The vector 529 is a timestamp, which is used to represent the time when the RSSI value was collected (in Unis time format).
3.2. Data Processing Algorithms
- (1)
- Scan the entire dataset, find any core point, and expand the core point. The augmentation method is to find all density-connected data points starting from this core point. Traverse all the core points in the neighborhood of the core point and look for points that are densely connected to these data points until there are no data points that can be expanded. The boundary nodes of the final clustered clusters are all non-core data points.
- (2)
- Rescan the remaining data set to find the core points that have not been clustered and repeat the above steps to expand the core points.
- (3)
- Until there are no new core points in the dataset. Data points in the dataset that are not included in any clusters constitute noise.
3.3. The Positioning Process of the RF Algorithm
- (1)
- Assuming that the offline database is the training data set, part of the data is randomly selected, replaced N times, and a decision tree is constructed. This randomness ensures that each decision tree has a different focus on data learning and ensures independence between trees.
- (2)
- Assuming that the number of different features of the training data set is D, select some features randomly as E, and ensure that each time E is less than D, and the E feature is the decision condition of the decision tree. The number of feature selections determines the effectiveness of random forests. In other words, if it is too small, the classification accuracy will be low, and conversely, if it is too large, the independence between trees will be reduced. With this randomness, decision trees have good independence and appropriate classification accuracy.
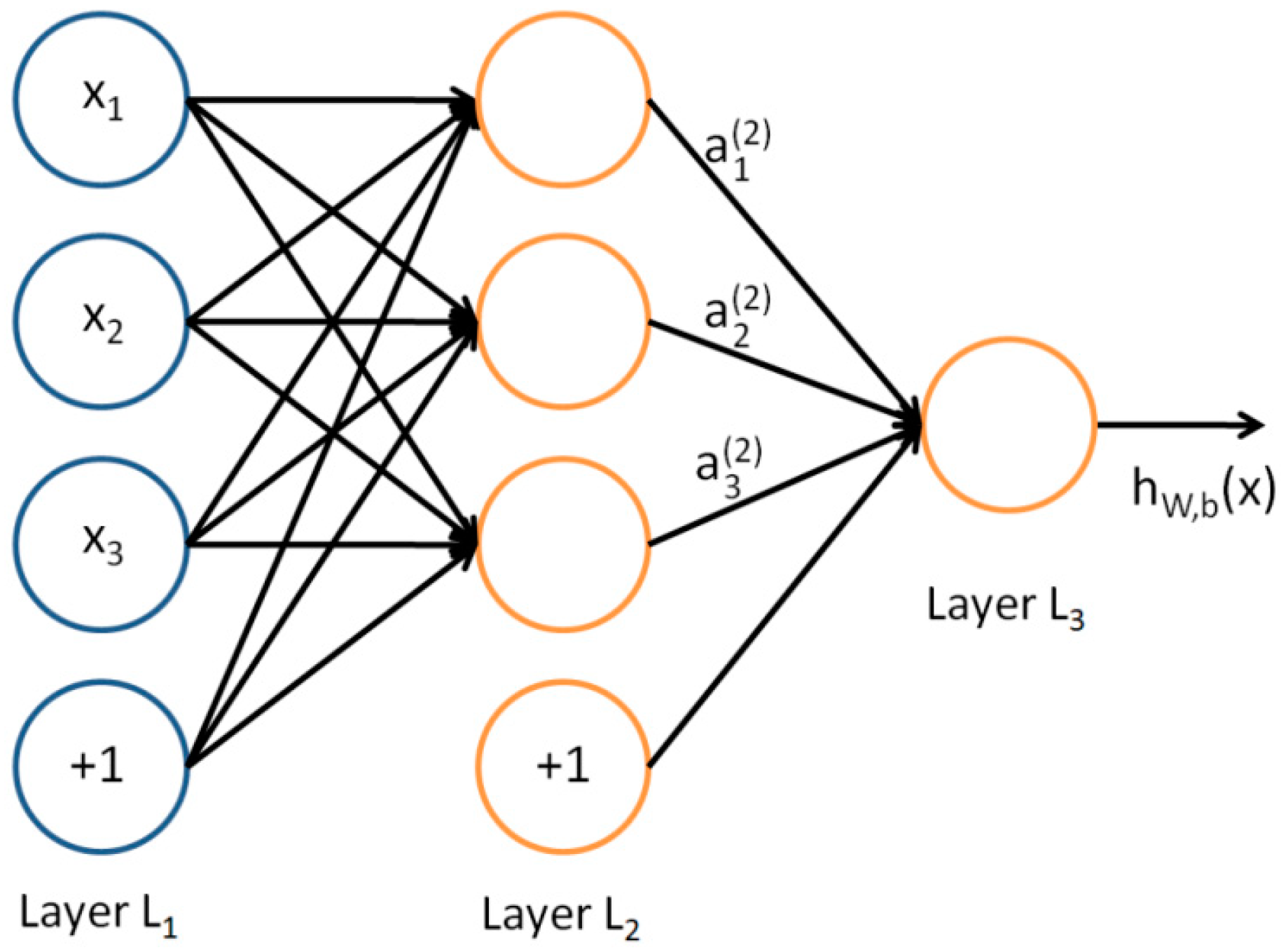
3.4. DNN Localization Algorithm
- (1)
- Initialize first-order and second-order moment variables , Initialization time .
- (2)
- A small batch containing m samples was collected from the training set; corresponding target is .
- (3)
- The gradient is calculated according to the Equation (3) on the basis of the mini-batch data.
- (4)
- Refresh the time according to Equation (4).
- (5)
- The updated partial first-moment estimation is substituted into Equation (7) to achieve the correction of first-moment error.
- (6)
- The corrected first-order moment error and biased second-order moment estimation are substituted into Equation (8) to achieve the correction of second-order moment error.
- (7)
- Finally, the learning rate is updated through Equation (9).
3.5. Positioning Process
- (1)
- First normalize the data and then use the DBSCAN algorithm to divide the dataset into three regions: core points, edge points and noise points.
- (2)
- The data of core points and edge points are set out by using the set-out method, and the data are divided into training set and verification set, which are used for training and verification of the improved DNN model and RF model.
- (3)
- The RSSI value received in the online phase is used as the input, and the calculation input is compared with the Euclidean distance of the core point and the edge point. If it belongs to the core point, the improved DNN is used to complete the positioning task. If it belongs to the edge point, the RF algorithm is used to complete the positioning task.
4. Experimental Procedure and Results
4.1. Data Processing
4.2. Edge Point Location Process
4.3. Core Point Positioning Process
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saputra, M.R.U.; Markham, A.; Trigoni, N. Visual SLAM and structure from motion in dynamic environments: A survey. ACM Comput. Surv. (CSUR) 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Sumikura, S.; Shibuya, M.; Sakurada, K. OpenVSLAM: A versatile visual SLAM framework. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 2292–2295. [Google Scholar]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Guan, W.; Huang, L.; Wen, S.; Yan, Z.; Liang, W.; Yang, C.; Liu, Z. Robot localization and navigation using visible light positioning and SLAM fusion. J. Light. Technol. 2021, 39, 7040–7051. [Google Scholar] [CrossRef]
- Poulose, A.; Eyobu, O.S.; Kim, M.; Han, D.S. Localization error analysis of indoor positioning system based on UWB measurements. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 84–88. [Google Scholar]
- Kunhoth, J.; Karkar, A.G.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum.-Cent. Comput. Inf. Sci. 2020, 10, 18. [Google Scholar] [CrossRef]
- Dong, Z.Y.; Xu, W.M.; Zhuang, H. Research on ZigBee indoor technology positioning based on RSSI. Procedia Comput. Sci. 2019, 154, 424–429. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, Q.; Wang, Z.; Yang, Y. Research on Indoor Positioning Algorithm Based on SAGA-BP Neural Network. IEEE Sens. J. 2021, 22, 3736–3744. [Google Scholar] [CrossRef]
- Chen, R.; Li, Z.; Ye, F.; Guo, G.; Xu, S.; Qian, L.; Liu, Z.; Huang, L. Precise indoor positioning based on acoustic ranging in smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 21008986. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Moon, N. Random forest and WiFi fingerprint-based indoor location recognition system using smart watch. Hum.-Cent. Comput. Inf. Sci. 2019, 9, 1–14. [Google Scholar] [CrossRef]
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. Indoor fingerprint positioning based on Wi-Fi: An overview. ISPRS Int. J. Geo-Inf. 2017, 6, 135. [Google Scholar] [CrossRef] [Green Version]
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Lembo, S.; Tuomimaki, L.; Huilla, S.; Honkamaa, P.; Laukkanen, M.; Kemppi, P. Indoor positioning platform to support 5G location based services. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth low energy based occupancy detection for emergency management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 1 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 31–38. [Google Scholar]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy based HVAC actuation using existing WiFi infrastructure within commercial buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, Roma, Italy, 11–15 November 2013; pp. 1–14. [Google Scholar]
- Yang, J.; Wang, Z.; Zhang, X. An ibeacon-based indoor positioning systems for hospitals. Int. J. Smart Home 2015, 9, 161–168. [Google Scholar] [CrossRef]
- Koppar, A.R.; Singh, H.; Navali, L.; Mohan, P. Indoor Positioning System (IPS) in Hospitals. In Intelligent Systems; Springer: Singapore, 2021; pp. 171–179. [Google Scholar]
- Kanan, R.; Elhassan, O. A combined batteryless radio and wifi indoor positioning for hospital nursing. J. Commun. Softw. Syst. 2016, 12, 34–44. [Google Scholar] [CrossRef]
- Nuño-Maganda, M.A.; Herrera-Rivas, H.; Torres-Huitzil, C.; Marín-Castro, H.M.; Coronado-Pérez, Y. On-Device learning of indoor location for WiFi fingerprint approach. Sensors 2018, 18, 2202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chebli, M.S.; Mohammad, H.; Amer, K.A. An overview of wireless indoor positioning systems: Techniques, security, and countermeasures. In Proceedings of the International Conference on Internet and Distributed Computing Systems, Naples, Italy, 10–12 October 2019; Springer: Cham, Switzerland, 2019; pp. 223–233. [Google Scholar]
- Ehn, M.; Richardson, M.X.; Stridsberg, S.L.; Redekop, K.; Wamala-Andersson, S. Mobile safety alarms based on gps technology in the care of older adults: Systematic review of evidence based on a general evidence framework for digital health technologies. J. Med. Internet Res. 2021, 23, e27267. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Chen, J.; Song, S.; Yu, H. An indoor multi-source fusion positioning approach based on PDR/MM/WiFi. AEU-Int. J. Electron. Commun. 2021, 135, 153733. [Google Scholar] [CrossRef]
- Álvarez-Merino, C.S.; Luo-Chen, H.Q.; Khatib, E.J.; Barco, R. WiFi FTM, UWB and cellular-based radio fusion for indoor positioning. Sensors 2021, 21, 7020. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Bi, J.; Xu, S.; Si, M.; Qi, H. Indoor positioning method using WiFi RTT based on LOS identification and range calibration. ISPRS Int. J. Geo-Inf. 2020, 9, 627. [Google Scholar] [CrossRef]
- Ninh, D.B.; He, J.; Trung, V.T.; Huy, D.P. An effective random statistical method for Indoor Positioning System using WiFi fingerprinting. Future Gener. Comput. Syst. 2020, 109, 238–248. [Google Scholar] [CrossRef]
- Gao, J.; Li, X.; Ding, Y.; Su, Q.; Liu, Z. WiFi-based indoor positioning by random forest and adjusted cosine similarity. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1426–1431. [Google Scholar]
- Sun, H.; Zhu, X.; Liu, Y.; Liu, W. WiFi based fingerprinting positioning based on Seq2seq model. Sensors 2020, 20, 3767. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Chen, R.; Li, W.; Zhou, H.; Yan, K. Indoor Positioning Based on Walking-Surveyed Wi-Fi Fingerprint and Corner Reference Trajectory-Geomagnetic Database. IEEE Sens. J. 2021, 21, 18964–18977. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Z.; Cui, W.; Li, B.; Chen, C.; Cao, Z.; Gao, K. Wifi-based indoor robot positioning using deep fuzzy forests. IEEE Internet Things J. 2020, 7, 10773–10781. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H. Indoor positioning technologies without offline fingerprinting map: A survey. IEEE Commun. Surv. Tutor. 2018, 21, 508–525. [Google Scholar] [CrossRef]
- Wu, X.; Soltani, M.D.; Zhou, L.; Safari, M.; Haas, H. Hybrid LiFi and WiFi networks: A survey. IEEE Commun. Surv. Tutor. 2021, 23, 1398–1420. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, C.; Wang, Y. An indoor positioning method based on CSI by using features optimization mechanism with LSTM. IEEE Sens. J. 2020, 20, 4868–4878. [Google Scholar] [CrossRef]
- Shao, W.; Luo, H.; Zhao, F.; Tian, H.; Yan, S.; Crivello, A. Accurate indoor positioning using temporal–spatial constraints based on Wi-Fi fine time measurements. IEEE Internet Things J. 2020, 7, 11006–11019. [Google Scholar] [CrossRef]
- Tsuchida, S.; Takahashi, T.; Ibi, S.; Sampei, S. Machine learning-aided indoor positioning based on unified fingerprints of Wi-Fi and BLE. In Proceedings of the 2019 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Lanzhou, China, 18–21 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1468–1472. [Google Scholar]
- Jondhale, S.R.; Deshpande, R.S. Kalman filtering framework-based real time target tracking in wireless sensor networks using generalized regression neural networks. IEEE Sens. J. 2018, 19, 224–233. [Google Scholar] [CrossRef]
- Caso, G.; De Nardis, L.; Lemic, F.; Handziski, V.; Wolisz, A.; Di Benedetto, M.G. ViFi: Virtual fingerprinting WiFi-based indoor positioning via multi-wall multi-floor propagation model. IEEE Trans. Mob. Comput. 2019, 19, 1478–1491. [Google Scholar] [CrossRef]
- Blasio, G.S.; Quesada-Arencibia, A.; García, C.R.; Rodríguez-Rodríguez, J.C. Bluetooth Low Energy Technology Applied to Indoor Positioning Systems: An Overview. In Proceedings of the International Conference on Computer Aided Systems Theory, Palmas de Gran Canaria, Spain, 17–22 February 2019; Springer: Cham, Switzerland, 2019; pp. 83–90. [Google Scholar]
- Tao, Y.; Zhao, L. A novel system for WiFi radio map automatic adaptation and indoor positioning. IEEE Trans. Veh. Technol. 2018, 67, 10683–10692. [Google Scholar] [CrossRef]
- Du, X.; Yang, K.; Zhou, D. MapSense: Mitigating inconsistent WiFi signals using signal patterns and pathway map for indoor positioning. IEEE Internet Things J. 2018, 5, 4652–4662. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Yu, K.; Wang, W.; Li, X. A self-adaptive AP selection algorithm based on multiobjective optimization for indoor WiFi positioning. IEEE Internet Things J. 2020, 8, 1406–1416. [Google Scholar] [CrossRef]
- Ko, C.H.; Wu, S.H. A framework for proactive indoor positioning in densely deployed WiFi networks. IEEE Trans. Mob. Comput. 2020, 21, 21440544. [Google Scholar] [CrossRef]
- Tao, Y.; Zhao, L. AIPS: An accurate indoor positioning system with fingerprint map adaptation. IEEE Internet Things J. 2021, 9, 3062–3073. [Google Scholar] [CrossRef]
- Belmonte-Fernández, Ó.; Montoliu, R.; Torres-Sospedra, J.; Sansano-Sansano, E.; Chia-Aguilar, D. A radiosity-based method to avoid calibration for indoor positioning systems. Expert Syst. Appl. 2018, 105, 89–101. [Google Scholar] [CrossRef]
- Li, L.; Guo, X.; Ansari, N. SmartLoc: Smart wireless indoor localization empowered by machine learning. IEEE Trans. Ind. Electron. 2019, 67, 6883–6893. [Google Scholar] [CrossRef]
- Qin, F.; Zuo, T.; Wang, X. Ccpos: Wifi fingerprint indoor positioning system based on cdae-cnn. Sensors 2021, 21, 1114. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Mao, S. Deep convolutional neural networks for indoor localization with CSI images. IEEE Trans. Netw. Sci. Eng. 2018, 7, 316–327. [Google Scholar] [CrossRef]
- Hahnel, D.; Burgard, W.; Fox, D.; Fishkin, K.; Philipose, M. Mapping and localization with RFID technology. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004, Proceedings. ICRA’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1. [Google Scholar]
- Li, N.; Becerik-Gerber, B. Performance-based evaluation of RFID-based indoor location sensing solutions for the built environment. Adv. Eng. Inform. 2011, 25, 535–546. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Occupancy detection for building emergency management using BLE beacons. In International Symposium on Computer and Information Sciences; Springer: Cham, Switzerland, 2016; pp. 233–240. [Google Scholar]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–7. [Google Scholar]
- Mazhar, F.; Khan, M.G.; Sällberg, B. Precise indoor positioning using UWB: A review of methods, algorithms and implementations. Wirel. Pers. Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-based indoor positioning systems: A review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, S.; Bouguila, N.; Wang, C.; Du, J.; Li, H.L. A fast clustering algorithm based on pruning unnecessary distance computations in DBSCAN for high-dimensional data. Pattern Recognit. 2018, 83, 375–387. [Google Scholar] [CrossRef]
- Zhu, Q.; Tang, X.; Elahi, A. Application of the novel harmony search optimization algorithm for DBSCAN clustering. Expert Syst. Appl. 2021, 178, 115054. [Google Scholar] [CrossRef]
- Maung NA, M.; Lwi, B.Y.; Thida, S. An enhanced rss fingerprinting-based wireless indoor positioning using random forest classifier. In Proceedings of the 2020 International Conference on Advanced Information Technologies (ICAIT), Yangon, Myanmar, 4–5 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 59–63. [Google Scholar]
- Lee, S.; Moon, N. Location recognition system using random forest. J. Ambient. Intell. Humaniz. Comput. 2018, 9, 1191–1196. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Core Point | Edge Point | |
|---|---|---|
| Z-Score | 94.9% | 82.5% |
| Max-Min | 98.8% | 87.2% |
| Accuracy of DNN | Accuracy of RF | |
|---|---|---|
| processed data | 98.8% | 87.2% |
| unprocessed data | 72.5% | 69.6% |
| Kind of Algorithm | Positioning Accuracy | Variance |
|---|---|---|
| RF Algorithms | 87.2% | 0.047 |
| Gradient boosting | 87.7% | 0.056 |
| multilayer perceptron | 81.28% | 2.05 |
| Softmax | Sigmoid | |
|---|---|---|
| Adam | 98.8% | 58% |
| GradientDescent | 96.5% | 53.5% |
| Kind of Algorithm | Positioning Accuracy | Variance |
|---|---|---|
| Improved DNN | 98.8% | 0.128 |
| KNN | 94% | 0.092 |
| Gradient boosting | 93.68% | 0.055 |
| multilayer perceptron | 95.58% | 0.084 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Gao, X.; Dai, X.; Xia, Y.; Hou, B. WiFi Indoor Location Based on Area Segmentation. Sensors 2022, 22, 7920. https://doi.org/10.3390/s22207920
Wang Y, Gao X, Dai X, Xia Y, Hou B. WiFi Indoor Location Based on Area Segmentation. Sensors. 2022; 22(20):7920. https://doi.org/10.3390/s22207920
Chicago/Turabian StyleWang, Yanchun, Xin Gao, Xuefeng Dai, Ying Xia, and Bingnan Hou. 2022. "WiFi Indoor Location Based on Area Segmentation" Sensors 22, no. 20: 7920. https://doi.org/10.3390/s22207920